T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
GNSS SĠSTEMLERĠNDEKĠ GÜNCEL DURUM VE SON GELĠġMELERĠN ĠNCELENMESĠ
BaĢar KOCA YÜKSEK LĠSANS TEZĠ
Harita Mühendisliği Anabilim Dalını
Mayıs - 2019 KONYA Her Hakkı Saklıdır
ii
TEZ KABUL VE ONAYI
BaĢar KOCA tarafından hazırlanan “GNSS SĠSTEMLERĠNDEKĠ GÜNCEL DURUM VE SON GELĠġMELERĠN ĠNCELENMESĠ” adlı tez çalıĢması …/…/… tarihinde aĢağıdaki jüri üyeleri tarafından oy birliği / oy çokluğu ile Selçuk Üniversitesi Fen Bilimleri Enstitüsü Harita Mühendisliği Anabilim Dalı’nda YÜKSEK LĠSANS TEZĠ olarak kabul edilmiĢtir.
Jüri Üyeleri Ġmza
BaĢkan
Unvanı Adı SOYADI ………..
DanıĢman
Unvanı Adı SOYADI ………..
Üye
Unvanı Adı SOYADI ………..
Üye
Unvanı Adı SOYADI ………..
Üye
Unvanı Adı SOYADI ………..
Yukarıdaki sonucu onaylarım.
Prof. Dr. …..……. FBE Müdürü
iii
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all materials and results that are not original to this work.
Ġmza
BaĢar KOCA
iv ÖZET
YÜKSEK LĠSANS TEZĠ
GNSS SĠSTEMLERĠNDEKĠ GÜNCEL DURUM VE SON GELĠġMELERĠN ĠNCELENMESĠ
BaĢar KOCA
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Harita Mühendisliği Anabilim Dalı DanıĢman: Prof. Dr.Ayhan CEYLAN
2019, 109 Sayfa Jüri
Prof. Dr.Ayhan CEYLAN Doç.Dr. Tamer BAYBURA Doç.Dr. Ġsmail ġANLIOĞLU
Küresel uydu konum belirleme sistemleri (GNSS), küresel veya bölgesel bazda konumlandırma, navigasyon ve zamanlama (Positioning, Navigation, and Timing - PNT) hizmetleri sağlayan herhangi bir uydu sistemini açıklayan genel bir terimdir. Günümüzde GPS en yaygın GNSS iken, diğer ülkeler de tamamlayıcı ve bağımsız bir PNT yeteneği sağlamak için kendi sistemlerine sahipler. Ana olanlar aĢağıda açıklanmıĢtır.
GLONASS (Globalnaya Navigazionnaya Sputnikovaya Sistema veya Global Navigation Satellite System), Rusya Federasyonu tarafından geliĢtirilen ve iĢletilen küresel bir GNSS'dir. Tam operasyonel sistem 24+ uydudan oluĢmaktadır.
Galileo, Avrupa Birliği tarafından tasarlanan ve iĢletilen küresel bir GNSS'dir. AB, 2016 yılında Galileo hizmetlerinin baĢladığını ilan etmiĢtir ve 2020 yılına kadar 24+ uydu sistemini tamamlamayı planlamaktadır.
BeiDou veya BDS, Çin Halk Cumhuriyeti tarafından tasarlanan ve iĢletilen bölgesel bir GNSS'dir. Çin Ģu anda 2020 yılına kadar 35 uydu ile küresel kapsama sağlamak için sistemi geniĢletmektedir. BDS daha önce Compass olarak adlandırılmaktaydı.
IRNSS, Hindistan Hükümeti tarafından geliĢtirilen ve iĢletilen bölgesel bir GNSS'dir. IRNSS, Hint bölgesini ve Hint anakarası çevresinde 1500 km'yi kapsayacak Ģekilde tasarlanmıĢ özerk bir sistemdir. Sistem 7 uydudan oluĢmaktadır ve 2018'de faaliyete geçmesi planlanmaktadır. 2016'da, Hindistan IRNSS'yi Navigation Indian Constellation (Navic, yani "sailor" veya "navigator") olarak değiĢtirmiĢtir.
QZSS, Japonya Hükümeti tarafından sahip olunan ve QZS System Service Inc. (QSS) tarafından iĢletilen bölgesel bir GNSS'dir. QZSS, Doğu Asya ve Okyanusya'daki kapsama alanını iyileĢtirmek için GPS'i tamamlamaktadır. Japonya, 2018 yılına kadar 4 uydudan oluĢan operasyonel bir sistem oluĢturmayı ve 2023 yılına kadar sistemi otonom kabiliyet için 7 uyduya geniĢletmeyi planlamaktadır.
v ABSTRACT
MS THESIS
ANALYSĠS OF THE CURRENT SĠTUATĠON AND RECENT TRENDS ĠN GNSS SYSTEM
BaĢar KOCA
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE / DOCTOR OF PHILOSOPHY IN GEOMATICS ENGINEERING
Advisor: Prof. Dr.Ayhan CEYLAN
2019, 109 Pages Jury
Prof. Dr.Ayhan CEYLAN Doç.Dr. Tamer BAYBURA Doç.Dr. Ġsmail ġANLIOĞLU
Global navigation satellite system (GNSS) is a general term that describes any satellite system that provides global or regional positioning, navigation, and timing (PNT) services.Today, GPS is the most common GNSS, while other countries have their own systems to provide complementary and independent PNT capability. The main ones are explained below.
GLONASS is a global GNSS developed and operated by the Russian Federation. The fully operational system consists of 24+ satellites.
Galileo is a global GNSS designed and operated by the European Union. The EU has announced the launch of Galileo services in 2016 and plans to complete 24+ satellite systems by 2020.
BeiDou or BDS is a regional GNSS designed and operated by the People's Republic of China. China is now expanding the system to provide global coverage with 35 satellites by 2020. BDS was previously called Compass.
IRNSS is a regional GNSS developed and operated by the Government of India. The IRNSS is an autonomous system designed to cover 1500 km around the Indian subcontinent and the Indian mainland. The system consists of 7 satellites and is planned to be operational in 2018. In 2016, India changed its IRNSS to Navigation Indian Constellation (Navic, or "sailor" or "navigator").
QZSS is owned by the Government of Japan and is owned by QZS System Service Inc. (QSS). QZSS completes GPS to improve coverage in East Asia and Oceania. Japan plans to build an operational system consisting of 4 satellites up to 2018 and to expand the system to 7 satellites for autonomous capability until 2023.
vi ÖNSÖZ
Tez çalıĢmam sırasında kıymetli bilgi, birikim ve tecrübeleri ile bana yol gösterici ve destek olan, ilgisini ve önerilerini göstermekten kaçınmayan değerli danıĢman hocam sayın Prof. Dr. Ayhan CEYLAN’a ve yüksek lisans eğitimim boyunca yardım, bilgi ve tecrübeleri ile bana sürekli destek olan Harita Mühendisliği bölümündeki tüm hocalarıma sonsuz teĢekkür ve saygılarımı sunarım.
BaĢar KOCA KONYA- 2019
vii ĠÇĠNDEKĠLER TEZ BĠLDĠRĠMĠ ... iii ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii KISALTMALAR ... ix 1. GĠRĠġ ... 1
2. Küresel Konum Belirleme Sistemleri (GNSS) ... 3
2.1. Küresel ve Bölgesel Konum Belirleme Sistemleri.. ... 3
2.1.1. GPS (Global Positioning System; Küresel Konumlama Sistemi) ... 4
2.1.1.1.GPS Sisteminin GeliĢim Süreci ... 5
2.1.1.2. GPS Uyduları Listesi ... 7
2.1.1.3. GPS Sinyalleri ... 11
2.1.1.4. Seçmeli EriĢilebilirlik (Selective Availability-SA) ... 16
2.1.1.5. GPS Kontrol Bölümü ... 17
2.1.2. GLONASS (Global Navigation Satellite System; Küresel Uydu Konumlandırma Sistemi) ... 18
2.1.2.1. GLONASS Uyduları Listesi ... 19
2.1.2.2. GLONASS Sisteminin Amacı ve Öncesi ... 22
2.1.2.3. GLONASS Sisteminin GeliĢimi ve Geleceği ... 23
2.1.3. GALĠLEO (Alternatif Uydu Yönleyici Sistemi) ... 29
2.1.3.1. Galileo Konumlama Sistemi ... 29
2.1.3.2. Galileo Sisteminin Altyapısı ... 31
2.1.3.3. Galileo Uyduları Listesi ... 32
viii
2.1.4. COMPASS, BEĠDOU-1/2 (Beidou Navigation Satellite System) ... 36
2.1.4.1. Deneysel BeiDou Sistemi (BeiDou-1) ... 37
2.1.4.2. BeiDou-2 (Küresel Konumlama Sistem) ... 37
2.1.4.3. BeiDou Uyduları Listesi ... 39
2.1.4.4. BeiDou Sisteminin Ana Bölümleri ... 40
2.1.4.5. BeiDou Sistemin GeliĢimi ve Geleceği ... 41
2.1.4.6. Çin’in Galileo Sistemine Katılımı ... 43
2.1.5. IRNSS (Indian Regional Navigation Satellite System; Hint Bölgesel Navigasyon Uydu Sistemi) ... 44
2.1.5.1. IRNSS Sisteminin Genel Yapısı ... 45
2.1.5.2. IRNSS Sisteminin GeliĢimi ve Geleceği ... 47
2.1.6. Quasi-Zenith Satellite System (QZSS) ... 48
2.1.6.1. Sistemin Konumlama Doğruluğu ... 51
2.1.6.2. QZSS Sisteminin GeliĢimi ve Geleceği ... 52
2.2. GNSS SĠSTEMĠNDEKĠ GÜNCEL GELĠġMELER.. ... 53
2.2.1. GPS Sistemindeki Güncel GeliĢmeler ... 61
2.2.2. GLONASS Sistemindeki Güncel GeliĢmeler ... 70
2.2.3. GALĠLEO Sistemindeki Güncel GeliĢmeler ... 75
2.2.4. BeiDou Sistemindeki Güncel GeliĢmeler ... 88
2.2.5. IRNSS Sistemindeki Güncel GeliĢmeler ... 93
2.2.6. QZSS Sistemindeki Güncel GeliĢmeler ... 96
3. SONUÇLAR VE ÖNERĠLER ... 99
4. KAYNAKLAR ... 102
ix
KISALTMALAR
BDC:BeiDou Coordinate (BeiDou Koordinat)
BDS:BeiDou Navigation Satellite System (BeiDou Navigasyon Uydu Sistemi) CC:Central Clock (Merkez Saat)
CDMA:Code Division Multiple Access (Kod Bölmeli Çoklu EriĢim) CNAV:Civil Navigation (Sivil Navigasyon)
CODE:Center for Orbit Determination in Europe (Avrupa Yörünge Belirleme Merkezi) CTRF:China Terrestrial Reference Frame (Çin Karasal Referans Sistemi)
EGEP:European GNSS Evolution Programme (Avrupa GNSS GeliĢim Programı) FDMA:Frequency Division Multiple Access (Frekans Bölmeli Çoklu EriĢim) GA:Ground Antennas (Zemin Antenleri)
GAGAN:GPS Aided GEO Augmented Navigation(GPS Destekli GEOArtırma
Navigasyon)
GEO:Geostationary Earth Orbit (Yer Sabit Dünya Yörüngesi)
GIPR:GPS Intrusion Protection Reinforcement (GPS Saldırı Koruma Güçlendirme) GLONASS:Global Navigation Satellite System (KüreselKonumlama Uydu Sistemi) GNSS:Global Navigation Satellite Systems (KüreselKonumlama Uydu Sistemleri) GPS:Global Positioning System (Küresel Konumlandırma Sistemi) HEO:Highly Elliptical Yörünge (Yüksek Eliptik Yörünge) IGS:International GNSS Service (Uluslararası GNSS Servisi) IGSO:Inclined Geosynchronous Orbit (Eğik Yer EĢ Zamanlı Yörünge) IRNSS:Indian Regional Navigation Satellite System (Hindistan Bölgesel Navigasyon
Uydu Sistemi)
ITRF:International Terrestrial Reference System(Uluslararası Karasal Referans
Sistemi)
MBOC:Multiplexed Binary Offset Carrier (Çok kısımlı Ġkili Ofset TaĢıyıcı) MCS:Master Control Station (Master Kontrol Ġstasyonu) MEO:Medium Earth Orbit (Orta Dünya Yörüngesi)
MMS:Monitoringand Measuring Stations (Ġzleme ve Ölçme Ġstasyonları) MS:Monitor Stations (Ġzleme Ġstasyonları)
NAVIC:Navigation Indian Constellation (Hindistan Navigaston Sistemi) PNT:Positioning, Navigation and Timing (Konumlandırma, Navigasyon ve
Zamanlama)
PPS:Precision Positioning Service (Hassas Konumlandırma Hizmeti) PZ-90:Parametry Zemli 1990 (Parametre Zemli 1990) QZSS:Quasi-Zenith Satellite System (Quasi-Zenith Uydu Sistemi) SA:Selective Availability (Seçici Kullanılabilirlik)
SBAS:Space-Based Augmentation Systems (Uzay Tabanlı Artırma Sistemleri) SCC:System Control Centre (Sistem Kontrol Merkezi)
SLR:Laser Ranging Stations (Lazer DeğiĢim Ġstasyonlar) SPS:Standard Positioning Service (Standart Konumlandırma Servisi) TT&C:Telemetry, Trackingand Command (Telemetri, Ġzleme ve Komuta) ULS:Uplink Station (Uplink Ġstasyonu)
1 1. GĠRĠġ:
Küresel Uydu Konum Belirleme Sistemleri (Global Navigation Satellite System-GNSS) askeri, sivil ve bilimsel uygulamalarda aktif bir Ģekilde kullanılan konum belirleme sistemlerinden biridir. Her geçen gün etkisi ve uygulama alanları artan Küresel Uydu Konum Belirleme Sistemlerinin kullanıcı sayıları da günden güne artıĢ göstermektedir.
Ġnternet gibi, GNSS de küresel bilgi altyapısının önemli bir unsurudur. GNSS'in ücretsiz, açık ve güvenilir doğası, modern yaĢamın her yönünü etkileyen yüzlerce uygulamanın geliĢtirilmesine yol açmıĢtır. GNSS teknolojisi Ģimdi cep telefonlarından kol saatlerine, iĢ makinelerinden nakliye konteynerlarına ve ATM'lere kadar çoğu alanda kullanılmaktadır.
GNSS; tarımı, inĢaatı, madenciliği ve lojistik tedarik zinciri yönetimini kapsayacak Ģekilde ekonominin geniĢ bir alanında verimliliği arttırmaktadır. BaĢlıca iletiĢim ağları, bankacılık sistemleri, finansal piyasalar ve elektrik Ģebekeleri kesin zaman senkronizasyonu için büyük ölçüde bu sistemlere bağlıdır. Bazı kablosuz servisler onsuz çalıĢamamaktadır.
Konum belirleme sistemleri; ulaĢım kazalarını önleyerek, arama kurtarma çalıĢmalarına yardımcı olarak ve acil servislerin felaket yardımlarını hızlandırarak hayat kurtarmaktadır. GNSS, hava sahası kapasitesini arttırırken, uçuĢ güvenliğini artıracak olan Yeni Nesil Hava TaĢımacılığı Sistemi (NextGen) için çok önemlidir. Ayrıca hava durumu tahminleri, deprem izleme ve çevre koruma gibi bilimsel çalıĢmaların da geliĢmesine katkı sağlamaktadır.
GNSS ulusal güvenlik içinde kritik olmaya devam etmektedir ve uygulamaları askeri operasyonlarının hemen hemen her yerine entegre edilmiĢtir. Neredeyse tüm yeni askeri teçhizatlar, araçlar ve cephaneler GNSS ile donatılmıĢ durumdadır.
GNSS, Küresel Konumlama Uydu Sistemi anlamına gelir ve küresel kapsama alanıyla özerk coğrafi konumlandırma sağlayan uydu navigasyon sistemleri için genel terimdir. GNSS dünya çapında kullanılan bir terimdir.
2
GNSS / GPS Uygulamaları ġunları Ġçerir:
Ġzleme / Haritalama Cihazları Endüstriyel Makineler
Deniz gemileri Hava seyrüsefer
Otomobiller (Venezia M. 2015), (URL 1.1)
Günümüzde Küresel Konum Belirleme sistemlerinde baĢlıca hizmet sağlayıcı olan üç sistem bulunmaktadır. Bunlar; ABD (GPS), Rusya (GLONASS) ve Avrupa Birliği (Galileo) dir. Çin (Compass/Beidou), Japonya (QZSS) ve Hindistan (IRNSS /NAVIC) sistemleri ise uluslararası alanda söz sahibi olma çabalarını sürdürmektedirler.
Bu çalıĢmada, günümüzde kullanılmakta olan uydu tabanlı navigasyon sistemlerindeki güncel geliĢmeler, bu geliĢmelerin sistemlerin çalıĢma prensiplerinde ne gibi farklılıklar ortaya çıkaracağı, yapım çalıĢmaları bitmiĢ olan konumlama sistemlerinde gelecek yıllarda ne Ģekilde değiĢiklikler yapılacağı ve bu güncellemeler çerçevesinde sistemlerin ne gibi yeni kullanım alanlarına sahip olacakları değerlendirilecektir. Ayrıca, Ģu an yapım çalıĢmaları devam eden konumlama sistemlerinin hangi yapım aĢamasında bulundukları, ne zaman tam kapasite ile aktif duruma gelecekleri ve çalıĢma prensipleri hakkında bilgi verilecektir.
3
2. KÜRESEL KONUM BELĠRLEME SĠSTEMLERĠ (GNSS):
Dünya’nın her yerinde, her türlü hava koĢullarında uydulardan alınan sinyaller yardımıyla global bir koordinat sisteminde (ITRF), anlık ve yüksek doğrulukta konum, hız ve zaman belirlemeye yarayan bir navigasyon sistemidir (Yıldız ve Kahveci, 2010).
Uydu Tabanlı Navigasyon Sistemleri her türlü kara, deniz ve hava taĢıtlarının konumlama, yön bulma, arama-kurtarma, hedef bulma, jeodezik ve jeodinamik ölçmeler, kadastral ölçmeler, fotogrametrik haritalama çalıĢmaları, deformasyon ölçmeleri, araç takip sistemleri, Cors ağları ve CBS uygulamaları gibi pekçok askeri ve sivil alanlarda aktif olarak kullanılmaktadır.
Bir uydu navigasyon veya "satnav" sistemi, bir görüĢ hattı boyunca iletilen zaman sinyallerini kullanarak (boylam, enlem ve yükseklik) özerk coğrafi konumlandırma sağlayan bir uydu sistemidir. Çoğu zaman "GNSS" ve "GPS" terimleri birbirlerinin yerine kullanılır ancak iki terim arasında anahtar farklılıklar vardır.
2.1. Küresel ve Bölgesel Konum Belirleme Sistemleri:
GPS (Global Positioning System; Küresel Konumlama Sistemi- ABD)
GLONASS (GlobalNavigation Satellite System; Küresel Uydu Konumlandırma Sistemi - RUSYA)
GALĠLEO (Alternatif Uydu Yönleyici Sistemi - AVRUPA BĠRLĠĞĠ)
COMPASS, BeiDou-2, (BeiDou Navigation Satellite System; BeiDou Uydu Navigasyon Sistemi - ÇĠN)
BeiDou-1(BeiDou Navigation Satellite System; BeiDou Uydu Navigasyon Sistemi - ÇĠN)
ĠRNSS (Indian Regional Navigation Satellite System; Hint Bölgesel Navigasyon Uydu Sistemi); NAVIC (Navigation Indian Constellation - HĠNDĠSTAN)
4
2.1.1. GPS (Global Positioning System; Küresel Konumlama Sistemi):
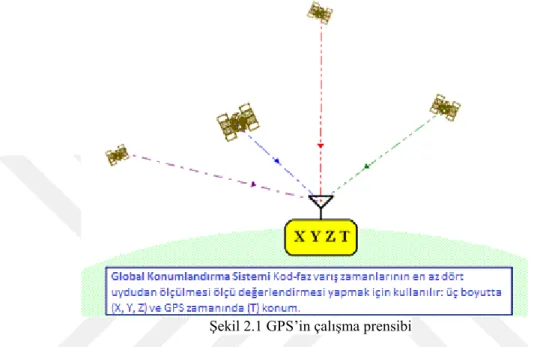
GPS (Global Positioning System; Küresel Konumlama Sistemi), Dünya üzerinde herhangi engelsiz bir görüĢ hattında, dört veya daha fazla uydusu ile her türlü hava koĢulunda yer ve zaman bilgileri sağlayan uzay tabanlı uydu navigasyon sistemidir
ġekil 2.1 GPS’in çalıĢma prensibi
GPS sistemi, daha önce geliĢtirilmiĢ olan konumlama sistemlerinin yeterli gelmeyen fonksiyonlarını geliĢtirmek amacı ile 1960'larda baĢlayan bir dizi gizli araĢtırma ve incelemelerin de dahil olduğu ve ilk çalıĢmalarda ortaya atılan görüĢlerinde eklenmesi ile 1973 senesinde geliĢtirilmiĢtir. GPS, ABD Savunma Bakanlığı tarafından asıl olarak yirmi dört uydu ile iĢletilecek Ģekilde planlanmıĢ ve hizmete alınmıĢtır. Sistem 1994 senesinde tam kapasite ile çalıĢır duruma girmiĢtir.
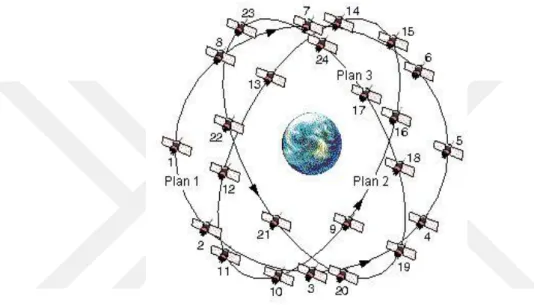
GPS uyduları, orta Dünya yörünge (Medium Earth orbit - MEO)’da yeryüzünden yaklaĢık 20200 km (12550 mil)’lik yörünge yüksekliğinde bulunmaktadırlar. Sistemin her bir uydusu 11 saat 58 dakikalık periyodlar ile Dünya'nın etrafında günde iki kez dönmektedir (ġekil 2.2).
GPS sistemi içindeki uydular, Dünya’nın çevresinde bulunan ve eĢit aralıklara sahip altı yörünge düzlemine yerleĢtirilmiĢlerdir. Her düzlem, temel uydular tarafından kullanılan dört ”konum” içermektedir. Bu 24 “konumlu düzenleme, kullanıcıların yeryüzündeki neredeyse her noktadan en az dört uyduyu görebilmesini sağlamaktadır.
5
ġekil 2.2 GPS uydularının yörüngeleri
ABD Hava Kuvvetleri, bazal uyduları hizmette kaldıkları süre boyunca sistemin kapsama alanını korumak için 24'den fazla GPS uydusunu kullanmaktadır. Fazladan uydular, GPS performansını artırabilir ancak çekirdek uydu sisteminin bir parçası sayılmamaktadırlar.
ABD Hava Kuvvetleri 2011 yılının Haziran ayında "Expandable24" yapılandırması kapsamında, GPS sisteminin yirmi dört uydu konumundan üçü geniĢletilmiĢtir ve altı uydu yeniden konumlandırılmıĢtır. Böylece fazladan üç uydu daha GPS sistemine katılmıĢ oldu. Sonuç olarak, GPS dünya genelinde geliĢtirilmiĢ kapsama alanı ile yirmi yedi uyduyal uydu konumlama sistemi daha etkili bir Ģekilde iĢler duruma eriĢmiĢtir (URL 2.1), (URL 2.2), (GPS World, 2014).
2.1.1.1. GPS Sisteminin GeliĢim Süreci:
1972 yılında, ABD Hava Kuvvetleri Ataletsel Kılavuz Merkezi Test Tesisi'nde (Holloman Hv. K. Üssü) yer tabanlı uyduları kullanılarak White Sands Füze Menzili üzerinden GPS alıcılarının iki prototipinin geliĢtirilmesi için uçuĢ testleri yapılmıĢtır.
1978 yılında, ilk uydu olarak Blok-I GPS uydusu fırlatılmıĢtır.
1983 yılında, seyir hataları sonucu Sovyet yasak olan hava sahası içine sapmıĢ Kore Hava Yolları (KAL 007) uçağı bir Sovyet avcı uçağı tarafından düĢürüldü. 269 kiĢinin yaĢamını yitirdiği kaza sonrasında, ABD BaĢkanı Ronald Reagan'ın
6
GPS sisteminin sivil kullanımlar için hazır olacağını açıklaması ile sivil kullanıma geçilmiĢtir.
1985 yılında, on adet GPS Blok-I uydusu, GPS sisteminindaha güvenilir olması için fırlatılmıĢtı. Bu uyduların Komuta ve kontrolü, Kaliforniya Onizuka Hv. K. Üssü ve Colorado Springs Kolorado Falcon Hv. K. Üssü'nde (Schriever AFB) yer alan 2. Uydu Kontrol Filosu'na (2SCS) devredilmiĢtir.
14 ġubat 1989 tarihinde, ilk GPS Blok-II uydusu fırlatılmıĢtır.
1990 ve 1991 yılları arasındaki Körfez SavaĢı, GPS teknolojilerinin yaygın olarak kullanıldığı ilk savaĢ olmuĢtur.
1992 yılında, Hv. K. 50. Uzay Filosu (Space Wing) tarafından yönetilmekte olan sistemin yönetimi 2. Uzay Filosu (2ndSW) yönetimine bırakıldı.
Aralık 1993 itibariyle, GPS'nin uydu bölümü 24 uydu ile kullanılabilir ve Standart Konumlama Hizmeti (SPS - Standard Positioning Service) sağlayan, ilk operasyonel yeteneğini (IOC) elde etmiĢtir.
Tam Operasyonel Kabiliyeti (FOC), ordunun güvenli Hassas Konumlandırma Hizmetinin (PPS) tam kapasite ile kullanılabilirliği, Nisan 1995 yılında ABD Hava Kuvvetleri Uzay Komutanlığı (AFSPC) tarafından bildirilmiĢtir.
1996 yılında, sivil kullanıcılara GPS’in önemini bildiren yönergenin yanı sıra askeri kullanıcılar için de, ABD BaĢkanı Bill Clinton tarafından bir yönergesi yayınlandı ve Kurumlar arası GPS Yürütme Kurulu oluĢturulmasına karar verilmiĢtir.
1998 yılında, ABD BaĢkan Yardımcısı Al Gore, GPS III olarak bilinen, özellikle havacılık güvenliği olmak üzeregeliĢmiĢ kullanıcı doğruluğu ve güvenilirliği için iki yeni sivil sinyalin iletimi hakkında sistemi güncellemnin planlandığı açıklanmıĢtır.
2 Mayıs 2000 tarihinde "Seçici Kullanılabilirlik" olarak bilinen ve kullanıcıların bozulmuĢ sinyali almasını sağlayan uygulamaya, 1996'daki düzenleme ile son verilmiĢtir.
2004 yılında Amerika BirleĢik Devletleri Hükümeti GPS ve Avrupa'nın yapmayı planladığı Galileo sistemi için Avrupa Birliği ile iĢbirliği anlaĢması imzalamaıĢtır.
2005 yılında, ilk modern GPS uydusu fırlatıldı ve geliĢmiĢ kullanıcı verimi için ikinci sivil sinyal (L2C) yayını baĢlatılmıĢtır.
7
25 ġubat 2010 günü ABD Hava Kuvvetleri GPS konumlama sinyallerinin doğruluğunu ve kullanılabilirliğini artırmak ve GPS’in geliĢtirilmesinin önemli bir birimi olarak hizmet verecek olan GPS Yeni Nesil Operasyonel Kontrol Sistemini (OCX) geliĢtirmek için bir sözleĢme imzalamıĢtır. (URL 2.3).
2.1.1.2. GPS Uyduları Listesi:
Sistemin kurulumunu tamamlamak ve sistemi güncellemek amacıyla yörüngeye fırltılmıĢ olan uydular (Tablo 2.1).
SVN: Uzay aracı numarası Slot: YerleĢtirilen yörünge PRN: Uyduları Belirten kod
Tablo 2.1 GPS uyduları listesi (URL 2.4)
Uydu Fırlatma zamanı (UTC) Blok SVN PRN Slot ĠĢletim durumu / Emekli ed. tarihi Yorumlar OPS 5111 22.02.1978 I 1 4 17.07.1985 OPS 5112 13.05.1978 I 2 7 01.02.1988 OPS 5113 07.10.1978 I 3 6 18.05.1992 OPS 5114 11.12.1978 I 4 8 01.05.1990 OPS 5117 09.02.1980 I 5 5 11.05.1984 OPS 5118 26.04.1980 I 6 9 06.03.1991 N/A (Navstar
7) 19.12.1981 I 7 19.12.1981 N/A Yörüngesinde baĢarısız. OPS 9794 14.07.1983 I 8 11 04.05.1993 USA-001(uydu) (USA-1) 13.06.1984 I 9 13 20.06.1994 USA-005 08.09.1984 I 10 12 26.03.1996 USA-010 09.10.1985 I 11 3 14.04.1994 USA-035 14.02.1989 II 14 26.03.2000 USA-038 10.06.1989 II 13 B3 13.05.2004 USA-042 18.08.1989 II 16 13.10.2000 USA-047 21.10.1989 II 19 A5 11.09.2001 USA-049 11.12.1989 II 17 D3 23.02.2005 USA-050 24.01.1990 II 18 18.08.2000
8 Uydu Fırlatma zamanı (UTC) Blok SVN PRN Slot ĠĢletim durumu / Emekli ed. tarihi Yorumlar USA-054 26.03.1990 II 20 13.12.1996 Görevden alınıĢı, komutlanma olmadan iki
kez değiĢen frekansın ardındandır. USA-063 02.08.1990 II 21 E2 27.01.2003
USA-064 01.10.1990 II 15 D5 14.03.2007 17 Kasım 2006 emekli olana kadar. USA-066 26.11.1990 IIA 23 32 E5 ĠĢletimde
USA-071 04.07.1991 IIA 24 24 D1 04.11.2011 USA-079 23.02.1992 IIA 25 25 A2 18.12.2009
USA-080 10.04.1992 IIA 28 28 C2 15.08.1997 ABD-117 yerine erken emekli. USA-083 07.07.1992 IIA 26 26 F5 ĠĢletimde
USA-084 09.09.1992 IIA 27 A6 06.10.2012 USA-085 22.11.1992 IIA 32 01 31 01 30 F4 Sağlıksız PRN alıcı sorunları nedeniyle Ocak 1993 yılında 31 01 olarak değiĢtirilmiĢtir. USA-087 18.12.1992 IIA 29 29 F5 23.10.2007 USA-088 03.02.1993 IIA 22 22 B1 06.08.2003 USA-090 30.03.1993 IIA 31 31 C3 24.10.2005 USA-091 13.05.1993 IIA 37 7 C4 20.12.2007 USA-092 26.06.1993 IIA 39 9 A5 ĠĢletimde
USA-094 30.08.1993 IIA 35 30 B5 01.05.2013 28 Mart 2013'ten beri kullanılamaz. USA-096 26.10.1993 IIA 34 4 D4 ĠĢletimde
USA-100 10.03.1994 IIA 36 6 C6 ĠĢletimde USA-117 28.03.1996 IIA 33 3 C2 ĠĢletimde USA-126 16.07.1996 IIA 40 10 E6 ĠĢletimde USA-128 12.09.1996 IIA 30 30 B2 20.07.2011
N/A (GPS
IIR-1) 17.01.1997 IIR 42 12 17.01.1997 N/A Yörüngesinde baĢarısız. USA-132 23.07.1997 IIR 43 13 F3 ĠĢletimde
USA-135 06.11.1997 IIA 38 8 A3 ĠĢletimde USA-145 07.10.1999 IIR 46 11 D5 ĠĢletimde USA-150 11.05.2000 IIR 51 20 E1 ĠĢletimde USA-151 16.07.2000 IIR 44 28 B3 ĠĢletimde USA-154 10.11.2000 IIR 41 14 F1 ĠĢletimde
9 Uydu Fırlatma zamanı (UTC) Blok SVN PRN Slot ĠĢletim durumu / Emekli ed. tarihi Yorumlar
USA-156 30.01.2001 IIR 54 18 E4 ĠĢletimde USA-166 29.01.2003 IIR 56 16 B1 ĠĢletimde USA-168 31.03.2003 IIR 45 21 D3 ĠĢletimde USA-175 21.12.2003 IIR 47 22 E2 ĠĢletimde USA-177 20.03.2004 IIR 59 19 C3 ĠĢletimde USA-178 23.06.2004 IIR 60 23 F4 ĠĢletimde USA-180 06.11.2004 IIR 61 2 D1 ĠĢletimde
USA-183 26.09.2005 IIRM 53 17 C4 ĠĢletimde Ayrıca IIR-14 olarak da bilinir; ilk L2C sinyal yayını.
USA-190 25.09.2006 IIRM 52 31 A2 ĠĢletimde Ayrıca IIR-15 olarak da bilinir.
USA-192 17.11.2006 IIRM 58 12 B4 ĠĢletimde Ayrıca IIR-16 olarak da bilinir.
USA-196 17.10.2007 IIRM 55 15 F2 ĠĢletimde Ayrıca IIR-17 olarak da bilinir.
USA-199 20.12.2007 IIRM 57 29 C1 ĠĢletimde Ayrıca IIR-18 olarak da bilinir.
USA-201 15.03.2008 IIRM 48 7 A4 ĠĢletimde Ayrıca IIR-19 olarak da bilinir. USA-203 24.03.2009 IIRM 49 27 01 27 30 B6 Sağlıksız
Ayrıca IIR-20 olarak bilinen; L5 sinyaliyayınları
gösterimi. Kalitesi düĢük sinyal nedeniyle asla hizmete girmedi; 6 Mayıs 2011 tarihinde hizmet dıĢı bırakılmıĢtı ancak daha
sonra test için yeniden etkinleĢtirildi. Devreden çıkarılması öncesi PRN-01
yayını, PRN-27 tekrar etkinleĢtirilmesi ardından gerçekleĢtirildi. PRN-30, 8 Mayıs 2013'e kaydırılmıĢtır.
USA-206 17.08.2009 IIRM 50 5 E3 ĠĢletimde
BaĢlangıçta 1999 yılında IIR-3 fırlatılması planlanmıĢtı; ancak iĢlemleme sırasında zarar
görmüĢtür. Fırlatmadan önce J2 port bağlantısı kesilmiĢ L5 hizmetleri, aynı
zamanda IIR-21 olarak da bilinir. ABD Hava Kuvvetleri yararlı yük ile
birlikte son Delta II fırlatması yapıldı.Son
SLC-17A nihai fırlatması, Delta II 7925'dir.
10 Uydu Fırlatma zamanı (UTC) Blok SVN PRN Slot ĠĢletim durumu / Emekli ed. tarihi Yorumlar
USA-213 28.05.2010 IIF 62 25 B2 Ġlk iĢletimde olan L5 sinyal yayını yapıldı. USA-232 16.07.2011 IIF 63 1 D2 ĠĢletimde
USA-239 04.10.2012 IIF 65 24 A1 ĠĢletimde USA-242 15.05.2013 IIF 66 27 C5 ĠĢletimde USA-248 21.02.2014 IIF 64 30 A6 ĠĢletimde USA-251 17.05.2014 IIF 67 6 D6 ĠĢletimde USA-256 02.08.2014 IIF 68 4 F6 ĠĢletimde USA-258 29.10.2014 IIF 69 3 E1 ĠĢletimde USA-260 25.03.2015 IIF 71 26 B5 ĠĢletimde USA-262 15.07.2015 IIF 72 8 C5 ĠĢletimde USA-265 31.10.2015 IIF 73 10 E6 Devreye alma
içinde
Mevcut ve Gelecek Uydu Sürümleri:
GPS uydu sistemi eski ve yeni uyduların bir karıĢımıdır. AĢağıdaki tabloda, Block IIA (2nd generation, "Advanced"), Block IIR ("Replenishment"), Block IIR(M) ("Modernized"), Block IIF ("Follow-on"), ve GPS III uydularının mevcut ve gelecek nesillerinin özellikleri özetlenmektedir (URL 2.5).
Operasyonel uydu sayıları ve özellikleri, aĢağıdaki tabloda gösterilmiĢtir (Tablo 2.2).
11
Tablo 2.2 GPS uydu blokları ve özellikleri
GPS konumlama sisteminin 18 Nisan 2017 tarihinden itibaren, 31 operasyonel uydusu bulunmaktadır. Bu sayı yörüngede bulunan ancak ihtiyaç olduğunda tekrar etkinleĢtirilmek üzere görevden alınmıĢ GPS uydularını (artıkları) içermemektedir (URL 2.5).
2.1.1.3. GPS Sinyalleri: GPS L1 Band:
GPS L1 bandı (1575.42 MHz), navigasyon amaçları için en önemli bant haline gelmiĢtir. Günümüzde dünyadaki uygulamaların çoğu, bu frekansta iletilen sinyallere dayanmaktadır. ġu anda GPS ile L1: C / A Kodu, P (Y) Kodu ve M Kodu'nda üç sinyal iletilmektedir. Gelecekte, L1C olarak bilinen yeni bir sivil sinyal de iletilecektir.
12 GPS L2 Band:
GPS, L2 bandında (1227.60 MHz) L2C olarak bilinen modern bir sivil sinyali P (Y) Kodu ve M-Kodu ile birlikte iletmektedir. Özellikleri ve parametreleri bu nedenle L1 bandındakilere benzer. Ek olarak, Blok IIR-M, IIF ve müteakip SV'lerin blokları için, iki ilave PRN aralığı kodu iletilecektir. L2 Civil Moderate (L2 CM) kodu ve L2 Civil Long (L2 CL) kodlarıdır.
GPS L5 Band:
GPS L5 (1176.45 MHz) sinyali ilk kez IIF uydularında iletilecektir. SV numarası için PRN L5 kodları bağımsızdır. XBi dizisi seçici olarak geciktirilir, böylece temel kod oluĢturma tekniğinin farklı uydu kodlarını üretmesine izin verilmektedir (URL 2.6).
Yeni Sivil Sinyaller:
GPS geliĢtirme programının ana maksadı, konumlama sistemine yeni navigasyon sinyallerinin eklenmesini sağlamaktır.
Uydu sistemi için sivil maksatlı olmak üzere üç yeni sinyal tasarlanmıĢtır. Bunlar sinyaller: L2C, L5 ve L1C sinyalleridir. L1'de L1 C / A ya da C / A olmak üzere eski sivil sinyal ile birlikte gelecekte dört sivil GPS sinyali yayını yapılması planlanmaktadır. Kullanıcıların, yeni sivil sinyallerden yararlanabilmeleri için alıcılarını güncellemeleri gerekecektir.
ABD Hava Kuvvetleri, daha eski olan uyduları değiĢtirmek için yeni GPS uyduları fırlatmaktadır ve yeni sivil sinyaller kademeli olarak değiĢtirilmektedir. Yeni sinyallerin çoğu, 18 ila 24 uydudan yayınlanana kadar sınırlı kullanıma sahip olacaktır (URL 2.7).
Ġkinci Sivil Sinyal(L2C):
L2C sinyali, GPS’in ticari ihtiyaçlara yönelik özel olarak tasarlanmıĢ ikinci sivil sinyalidir.
L2C adı, sinyalin yayınlandığı radyo frekansını (1227 MHz veya L2) ve bu sinyalin sivil amaçlı olduğunu göstermektedir. L2 frekansında da iki askeri sinyal var.
13
Resim 2.1 GPS kullanıcısı
Çift frekanslı bir alıcıda L1 C / A ile birleĢtiğinde, L2C doğruluğu artıran bir teknik olan iyonosferik düzeltmeyi etkinleĢtirir. Çift frekanslı GPS alıcılarına sahip sivil kullanıcılar, askeri kullanıcılar ile aynı (veya daha iyi) doğruluğa sahiptir (Resim 2.1).
Profesyonel kullanıcılar için mevcut çift frekanslı iĢlemlere sahip L2C; daha hızlı sinyal alma imkânı, arttırılmıĢ güvenilirlik ve daha geniĢ çalıĢma aralığı sağlamaktadır.
L2C, sinyali eski L1 C/A sinyaline göre daha yüksek güçte yayın yapma imkânına sahiptir. Böylelikle ağaçların altında ve hatta tamamen kapalı mekânlarda daha kolay çalıĢma yapılabilecektir.
L2C sinyalinin kullanılmaya baĢlanması ile 2030 yılına kadar sinyalin, avantajları sayesinde ekonomik verimliliğin artacağı ve 5,8 milyar dolar tasarruf sağlayacağı ön görülmektedir.
L2C sinyal yayınlama özelliği bulunan ilk GPS IIR (M) uydusu 2005 yılında faaliteye alınmıĢtır. O günden beri uzaya gönderilen her GPS uydusu L2C vericisi içermektedir.
ABD Hava Kuvvetleri 2014 yılı Nisan ayında L2C ve L5 bandlarında sivil navigasyon (CNAV) mesajı yayınlamaya baĢlamıĢtır. Bundan önceki L2C ve L5 verisi içermeyen bir ileti (Message Type 0) olarak kabul edilmiĢtir ve sivil navigasyon
14
(CNAV) eklemek için GPS kontrol bölümüne bir takım düzenlemenin yapılması gerekli görülmüĢtür.
31 Aralık 2014’te ABD Hava Kuvvetleri tarafından günlük olarak CNAV güncellemeleri gönderilmeye baĢlanmıĢtır (URL 2.8).
Üçüncü Sivil Sinyal(L5):
L5, (safety-of-life) güvenli taĢımacılık ve diğer yüksek performanslı uygulamalar için zaruri ihtiyaçlara cevap vermek amacı ile geliĢtirilmiĢ, GPS’in üçüncü sivil sinyalidir.
Adı, sinyalin kullandığı radyo frekansına (1176 MHz) atıfta bulunmaktadır. GPS L5 sinyali sadece havacılık güvenliği hizmetleri için ayrılmıĢ olan bir radyo frekansından iletilmektedir. Daha yüksek güç, daha fazla bant geniĢliği ve geliĢmiĢ sinyal yapısı özellikleri bulunmaktadır.
Resim 2.2 GPS’in ulaĢımda kullanımı
Gelecekteki uçaklar doğruluğu (iyonosferik düzeltme ile) ve sağlamlığı (sinyal fazlalığı yoluyla) arttırmak için L1 C/A ile birlikte L5 kullanacaktır.
L5 sinyalinin kullanılması, sistemin doğruluğunun yanı sıra, havayolları, demiryolları, denizyolları ve otoyollardaki kapasite kullanımının ve yakıt verimliliğinin artması da amaçlanmıĢtır. (Resim 2.2).
15
L5, ulaĢımın ötesinde tüm dünyadaki kullanıcılara en geliĢmiĢ sivil GPS sinyalini sunacaktır. L5 sinyali L1 C/A ve L2C sinyalleri ile birlikte kullanıldığında, son derece sağlam bir hizmet sağlayacaktır. “Trilaning” olarak adlandırılan teknik sayesinde, üç GPS frekansının kullanılması, güçlendirme olmadan “metealtı” hassasiyetini ve güçlendirme ile çok uzun menzilli iĢlemleri mümkün kılacaktır.
ABD Hava Kuvvetleri 2009 yılında, GPS IIR-20 (M) uydusu ile test amaçlı L5 sinyalini baĢarılı bir Ģekilde yayınlanmıĢtır. 2010 yılı Mayıs ayında L5 vericisi bulunan ilk GPS IIF uydusu konumlama sistemine dahil edilmiĢtir.
ABD Hava Kuvvetleri 2014 yılı Nisan ayında L2C ve L5 sinyallerinde sivil navigasyon (CNAV) mesajı iletimi yapmıĢtır (URL 2.9).
Dördüncü Sivil Sinyal (L1C):
L1C sinyali, GPS ile uluslararası konumlama sistemlerinin bir arada çalıĢmasını sağlamak için planlanmıĢ GPS’in dördüncü sivil sinyalidir.
L1C adı, sinyalin (1575 MHz veya L1) kullandığı radyo frekansı ve bunun sivil maksatlı tasarlandığı anlamına gelmektedir. L1 sinyalinde iki adet askeri sinyal ile birlikte eski C/A sinyali de bulunmaktadır. L1C ve L1 C / A sinyalleri ile karıĢtırılmamalıdır.
Resim 2.3 Kentlerde mobil GPS kullanımı
L1C sinyali, ABD ulusal güvenlik yararlarını himaye ederek uluslararası iĢbirliğine imkân sağlayan Çok Yönlü Ġkili Ofset TaĢıyıcı (Multiplexed Binary Offset
16
Carrier-MBOC) modülasyon dizaynnını barındırmaktadır. Tasarımın, kentlerde ve diğer zorlu ortamlarda mobil GPS kullanımını artıracağı düĢünülmektedir (Resim 2.3).
ABD ve Avrupa öncelikle L1C sinyalini GPS ve Galileo için ortak sivil sinyal olacak Ģekilde tasarlamıĢtır. Japonya'nın Quasi-Zenith Uydu Sistemi (QZSS) ve Çin'in BeiDou sistemi de L1C benzeri sinyalleri kullanabilmektedir.
ABD ilk L1C sinyalini GPS III uydusu ile iletmeyi tasarlamaktadır. L1C sinyalinin geriye yönelik uyumluluk için muhafaza edilecek olan L1 C/A sinyali ile aynı frekansta yayın yapmaya devam etmesi planlanmaktadır (URL 2.10).
2.1.1.4. Seçmeli EriĢilebilirlik (Selective Availability-SA):
Seçmeli EriĢilebilirlik (SA), ABD’nin ulusal güvenlik gerekçeleri nedenleri ile uygulanan halka açık GPS sinyallerinin maksatlı bir Ģekilde bozulmasıdır.
Seçmeli EriĢilebilirlik (SA) uygulamasına, 2000 yılı Mayıs ayında GPS'i dünyanın her yerindeki ticari ve sivil kullanıcılar için daha hassas hale getirmek amacı ile son verilmiĢtir.
ABD, seçmeli eriĢilebilirlik özelliğini tekrar kullanma niyeti taĢımamaktadır.
ġekil 2.3 SA uygulamasına son verilmesi ile ölçümler arasındaki farklılık (Conley, 2000)
ġekil, Colorado Springs, Colorado'daki GPS Destek Merkezi Ġçin Overlook Systems'in Rob Conley tarafından hazırlanan SA geçiĢim yoluyla GPS navigasyon
17
hatalarının bir bölümüdür. GPS hataları, 0405 UTC önemli ölçüde azalmaktadır (gece yarısı EDT'den kısa bir süre sonra). Veriler, SA içermeyen çalıĢmanın ilk birkaç saatinde sadece 2.8 metre dairesel bir hatayı ve 4.6 metre küresel hatayı belirtmektedir (ġekil 2.3).
Eylül 2007'de ABD hükümeti Seçmeli EriĢilebilirlik (SA), özelliklerini içermeyen GPS uydularını satın alma kararını açıklamıĢtır. Bunu açıklama, 2000 yılındaki SA kararını kalıcı hale getirecek ve dünya genelindeki sivil GPS kullanıcıları için endiĢe verici olan GPS performansındaki düĢüĢ ortadan kalkmıĢ olacaktır (URL 2.11).
2.1.1.5. GPS Kontrol Bölümü:
Adından da anlaĢılacağı gibi Kontrol Bölümü, GPS uydularını sürekli izleyerek doğru yörünge ve zaman bilgilerini sağlamakatdır. Dünya üzerinde 5 adet kontrol istasyonu bulunmaktadır (Hawaii, Kwajalein, Colorado Springs (ana merkez), Ascension adası ve Diego Garcia (ġekil 2.4). Bunlardan dördü insansız, biri ise insanlı ana kontrol merkezidir. Ġnsansız kontrol merkezleri, topladıkları bilgileri ana merkeze yollamaktadır. Ana merkezde bu bilgiler değerlendirilerek gerekli düzeltmeler uydulara bildirilmektedir (URL 2.12).
ġekil 2.4 GPS Yer Kontrol Ġstasyonları: Gözlem Ġstasyonu (MS), Ana Kontrol Ġstasyonu (MCS), Yer Antenleri (GA) (URL 2.13)
18
2.1.2. GLONASS (Global Navigation Satellite System; Küresel Uydu
Konumlandırma Sistemi):
Globalnaya navigatsionnaya sputnikovayasistema veya Global Navigation Satell ite Sistem, tanımlamalarının kısa adıdır. Türkçe anlamı: Küresel Uydu Konumlandırma Sistemi veya Küresel Uydu Seyir Sistemi’dir. Rusya Devleti’nin tasarımını ve yapımını tamamladığı ikinci kuĢak bir küresel uydu konumlandırma sistemi ve Dünya’nın GPS'den sonra ikinci iĢler hale gelmiĢ uydu konumlandırma sistemidir.
ġekil 2.5 GLONASS Konumlama Sistemi
GeliĢimi 1976 yılında Sovyetler Birliği'nde baĢlayan GLONASS, adı verilen yüksek irtifalı (yaklaĢık 20.000 km) uydu navigasyon sisteminin test çalıĢmaları, Kosmos-1413, Kosmos-1414 ve Kosmos-1415 uydularının yörüngelerine gönderilmesi ile 12 Ekim 1982'de baĢlamıĢtır ancak konumlama sistemi, 1995 yılında yirmi dört uydu ile yeterli düzeyde çalıĢır hale getirilmiĢtir (ġekil 2.5).
Sistem tamamlandıktan sonra, Rus ekonomisinin çökmesi ve uzay sanayi finansmanının azalması nedeniyle bütünlüğü bozulmuĢtur. 2000'lerin baĢında Vladimir Putin'in baĢkanlığı altında sistemin restorasyonuna öncelik verilmiĢ ve finansmanı büyük ölçüde arttırılmıĢtır. Mayıs 2007'de Rusya Devlet BaĢkanı Vladimir Putin’in, kullanıcılara ücretsiz hizmet sunmak için GLONASS navigasyon sistemi hakkında bir kararname imzalaması ile uydu konumlama sisteminin sivil navigasyon sinyallerine eriĢim yetkisi Rusya ve yabancı tüketicilere ücretsiz ve sınırsız olarak sağlanmaya baĢlamıĢtır (URL 2.14).
19 2.1.2.1. GLONASS Uyduları Listesi:
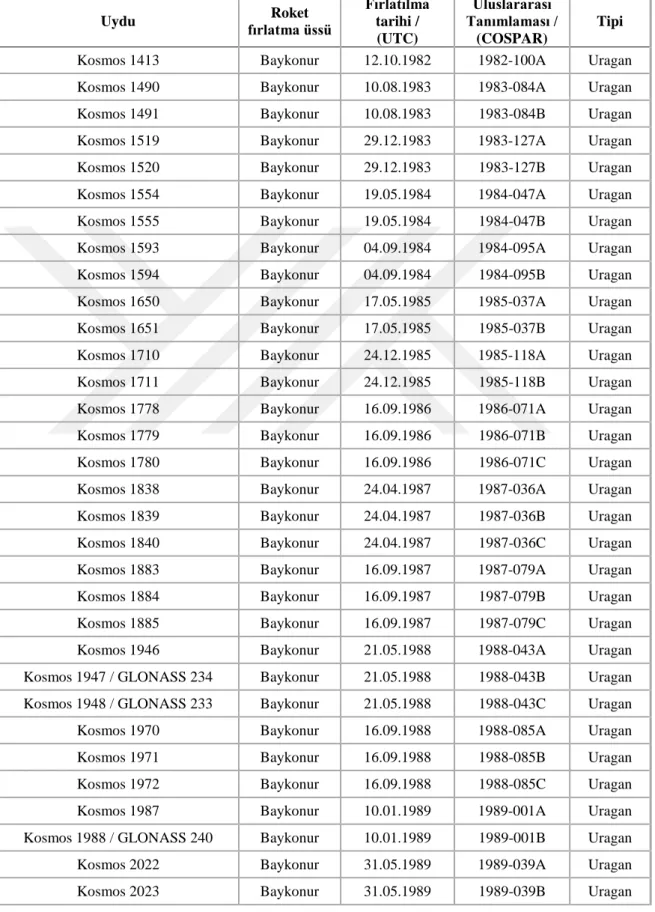
Sistemin için günümüze kadar fırlatılan uyduların listesi (Tablo 2.3). Tablo 2.3 GLONASS uyduları listesi (URL 2.15)
Uydu Roket fırlatma üssü Fırlatılma tarihi / (UTC) Uluslararası Tanımlaması / (COSPAR) Tipi
Kosmos 1413 Baykonur 12.10.1982 1982-100A Uragan Kosmos 1490 Baykonur 10.08.1983 1983-084A Uragan Kosmos 1491 Baykonur 10.08.1983 1983-084B Uragan Kosmos 1519 Baykonur 29.12.1983 1983-127A Uragan Kosmos 1520 Baykonur 29.12.1983 1983-127B Uragan Kosmos 1554 Baykonur 19.05.1984 1984-047A Uragan Kosmos 1555 Baykonur 19.05.1984 1984-047B Uragan Kosmos 1593 Baykonur 04.09.1984 1984-095A Uragan Kosmos 1594 Baykonur 04.09.1984 1984-095B Uragan Kosmos 1650 Baykonur 17.05.1985 1985-037A Uragan Kosmos 1651 Baykonur 17.05.1985 1985-037B Uragan Kosmos 1710 Baykonur 24.12.1985 1985-118A Uragan Kosmos 1711 Baykonur 24.12.1985 1985-118B Uragan Kosmos 1778 Baykonur 16.09.1986 1986-071A Uragan Kosmos 1779 Baykonur 16.09.1986 1986-071B Uragan Kosmos 1780 Baykonur 16.09.1986 1986-071C Uragan Kosmos 1838 Baykonur 24.04.1987 1987-036A Uragan Kosmos 1839 Baykonur 24.04.1987 1987-036B Uragan Kosmos 1840 Baykonur 24.04.1987 1987-036C Uragan Kosmos 1883 Baykonur 16.09.1987 1987-079A Uragan Kosmos 1884 Baykonur 16.09.1987 1987-079B Uragan Kosmos 1885 Baykonur 16.09.1987 1987-079C Uragan Kosmos 1946 Baykonur 21.05.1988 1988-043A Uragan Kosmos 1947 / GLONASS 234 Baykonur 21.05.1988 1988-043B Uragan Kosmos 1948 / GLONASS 233 Baykonur 21.05.1988 1988-043C Uragan Kosmos 1970 Baykonur 16.09.1988 1988-085A Uragan Kosmos 1971 Baykonur 16.09.1988 1988-085B Uragan Kosmos 1972 Baykonur 16.09.1988 1988-085C Uragan Kosmos 1987 Baykonur 10.01.1989 1989-001A Uragan Kosmos 1988 / GLONASS 240 Baykonur 10.01.1989 1989-001B Uragan Kosmos 2022 Baykonur 31.05.1989 1989-039A Uragan Kosmos 2023 Baykonur 31.05.1989 1989-039B Uragan
20 Uydu fırlatma üssü Roket
Fırlatılma tarihi / (UTC) Uluslararası Tanımlaması / (COSPAR) Tipi
Kosmos 2079 / GLONASS 242 Baykonur 19.05.1990 1990-045A Uragan Kosmos 2080 / GLONASS 228 Baykonur 19.05.1990 1990-045B Uragan Kosmos 2081 / GLONASS 229 Baykonur 19.05.1990 1990-045C Uragan Kosmos 2109 / GLONASS 247 Baykonur 08.12.1990 1990-110A Uragan Kosmos 2110 / GLONASS 248 Baykonur 08.12.1990 1990-110B Uragan Kosmos 2111 / GLONASS 249 Baykonur 08.12.1990 1990-110C Uragan Kosmos 2139 / GLONASS 750 Baykonur 04.04.1991 1991-025A Uragan Kosmos 2140 / GLONASS 753 Baykonur 04.04.1991 1991-025B Uragan Kosmos 2141 / GLONASS 754 Baykonur 04.04.1991 1991-025C Uragan Kosmos 2177 / GLONASS 768 Baykonur 29.01.1992 1992-005A Uragan Kosmos 2178 / GLONASS 769 Baykonur 29.01.1992 1992-005B Uragan Kosmos 2179 / GLONASS 771 Baykonur 29.01.1992 1992-005C Uragan Kosmos 2206 / GLONASS 774 Baykonur 30.07.1992 1992-047A Uragan Kosmos 2204 / GLONASS 756 Baykonur 30.07.1992 1992-047B Uragan Kosmos 2205 / GLONASS 772 Baykonur 30.07.1992 1992-047C Uragan Kosmos 2234 / GLONASS 773 Baykonur 17.02.1993 1993-010A Uragan Kosmos 2236 / GLONASS 757 Baykonur 17.02.1993 1993-010B Uragan Kosmos 2235 / GLONASS 759 Baykonur 17.02.1993 1993-010C Uragan Kosmos 2276 / GLONASS 760 Baykonur 11.04.1994 1994-021A Uragan Kosmos 2277 / GLONASS 761 Baykonur 11.04.1994 1994-021B Uragan Kosmos 2275 / GLONASS 758 Baykonur 11.04.1994 1994-021C Uragan Kosmos 2287 / GLONASS 767 Baykonur 11.08.1994 1994-050A Uragan Kosmos 2289 / GLONASS 775 Baykonur 11.08.1994 1994-050B Uragan Kosmos 2288 / GLONASS 770 Baykonur 11.08.1994 1994-050C Uragan Kosmos 2295 / GLONASS 763 Baykonur 20.11.1994 1994-076A Uragan Kosmos 2296 / GLONASS 764 Baykonur 20.11.1994 1994-076B Uragan Kosmos 2294 / GLONASS 762 Baykonur 20.11.1994 1994-076C Uragan Kosmos 2307 / GLONASS 765 Baykonur 07.03.1995 1995-009A Uragan Kosmos 2308 / GLONASS 766 Baykonur 07.03.1995 1995-009B Uragan Kosmos 2309 / GLONASS 777 Baykonur 07.03.1995 1995-009C Uragan Kosmos 2316 / GLONASS 780 Baykonur 24.07.1995 1995-037A Uragan Kosmos 2317 / GLONASS 781 Baykonur 24.07.1995 1995-037B Uragan Kosmos 2318 / GLONASS 785 Baykonur 24.07.1995 1995-037C Uragan Kosmos 2325 / GLONASS 782 Baykonur 14.12.1995 1995-068A Uragan Kosmos 2324 / GLONASS 778 Baykonur 14.12.1995 1995-068B Uragan Kosmos 2323 / GLONASS 776 Baykonur 14.12.1995 1995-068C Uragan Kosmos 2362 / GLONASS 779 Baykonur 30.12.1998 1998-077A Uragan
21 Uydu fırlatma üssü Roket
Fırlatılma tarihi / (UTC) Uluslararası Tanımlaması / (COSPAR) Tipi
Kosmos 2363 / GLONASS 784 Baykonur 30.12.1998 1998-077B Uragan Kosmos 2364 / GLONASS 786 Baykonur 30.12.1998 1998-077C Uragan Kosmos 2375 / GLONASS 787 Baykonur 13.10.2000 2000-063A Uragan Kosmos 2376 / GLONASS 788 Baykonur 13.10.2000 2000-063B Uragan Kosmos 2374 / GLONASS 783 Baykonur 13.10.2000 2000-063C Uragan Kosmos 2382 / GLONASS 711 Baykonur 01.12.2001 2001-053A Uragan Kosmos 2381 / GLONASS 789 Baykonur 01.12.2001 2001-053B Uragan Kosmos 2380 / GLONASS 790 Baykonur 01.12.2001 2001-053C Uragan Kosmos 2394 / GLONASS 791 Baykonur 25.12.2002 2002-060A Uragan Kosmos 2396 / GLONASS 793 Baykonur 25.12.2002 2002-060B Uragan Kosmos 2395 / GLONASS 792 Baykonur 25.12.2002 2002-060C Uragan Kosmos 2404 / GLONASS 701 Baykonur 10.12.2003 2003-056A Uragan-M Kosmos 2402 / GLONASS 794 Baykonur 10.12.2003 2003-056B Uragan Kosmos 2403 / GLONASS 795 Baykonur 10.12.2003 2003-056C Uragan Kosmos 2413 / GLONASS 796 Baykonur 26.12.2004 2004-053A Uragan Kosmos 2411 / GLONASS 712 Baykonur 26.12.2004 2004-053B Uragan-M Kosmos 2412 / GLONASS 797 Baykonur 26.12.2004 2004-053C Uragan Kosmos 2419 / GLONASS 714 Baykonur 25.12.2005 2005-050A Uragan-M Kosmos 2418 / GLONASS 713 Baykonur 25.12.2005 2005-050B Uragan-M Kosmos 2417 / GLONASS 798 Baykonur 25.12.2005 2005-050C Uragan Kosmos 2425 / GLONASS 716 Baykonur 25.12.2006 2006-062A Uragan-M Kosmos 2426 / GLONASS 717 Baykonur 25.12.2006 2006-062B Uragan-M Kosmos 2424 / GLONASS 715 Baykonur 25.12.2006 2006-062C Uragan-M Kosmos 2433 / GLONASS 720 Baykonur 26.10.2007 2007-052A Uragan-M Kosmos 2432 / GLONASS 719 Baykonur 26.10.2007 2007-052B Uragan-M Kosmos 2431 / GLONASS 718 Baykonur 26.10.2007 2007-052C Uragan-M Kosmos 2434 / GLONASS 721 Baykonur 25.12.2007 2007-065A Uragan-M Kosmos 2435 / GLONASS 722 Baykonur 25.12.2007 2007-065B Uragan-M Kosmos 2436 / GLONASS 723 Baykonur 25.12.2007 2007-065C Uragan-M Kosmos 2442 / GLONASS 724 Baykonur 25.09.2008 2008-046A Uragan-M Kosmos 2443 / GLONASS 725 Baykonur 25.09.2008 2008-046B Uragan-M Kosmos 2444 / GLONASS 726 Baykonur 25.09.2008 2008-046C Uragan-M Kosmos 2447 / GLONASS 727 Baykonur 25.12.2008 2008-067A Uragan-M Kosmos 2449 / GLONASS 729 Baykonur 25.12.2008 2008-067B Uragan-M Kosmos 2448 / GLONASS 728 Baykonur 25.12.2008 2008-067C Uragan-M Kosmos 2456 / GLONASS 730 Baykonur 14.12.2009 2009-070A Uragan-M Kosmos 2457 / GLONASS 733 Baykonur 14.12.2009 2009-070B Uragan-M
22 Uydu fırlatma üssü Roket
Fırlatılma tarihi / (UTC) Uluslararası Tanımlaması / (COSPAR) Tipi
Kosmos 2458 / GLONASS 734 Baykonur 14.12.2009 2009-070C Uragan-M Kosmos 2459 / GLONASS 731 Baykonur 01.03.2010 2010-007A Uragan-M Kosmos 2461 / GLONASS 735 Baykonur 01.03.2010 2010-007B Uragan-M Kosmos 2460 / GLONASS 732 Baykonur 01.03.2010 2010-007C Uragan-M Kosmos 2466 / GLONASS 738 Baykonur 02.09.2010 2010-041A Uragan-M Kosmos 2465 / GLONASS 737 Baykonur 02.09.2010 2010-041B Uragan-M Kosmos 2464 / GLONASS 736 Baykonur 02.09.2010 2010-041C Uragan-M Kosmos 2471 / GLONASS 701 Plesetsk 26.02.2011 2011-009A Uragan-K Kosmos 2474 / GLONASS 742 Plesetsk 02.10.2011 2011-055A Uragan-M Kosmos 2475 / GLONASS 743 Baykonur 04.11.2011 2011-064A Uragan-M Kosmos 2476 / GLONASS 744 Baykonur 04.11.2011 2011-064B Uragan-M Kosmos 2477 / GLONASS 745 Baykonur 04.11.2011 2011-064C Uragan-M Kosmos 2478 / GLONASS 746 Plesetsk 28.11.2011 2011-071A Uragan-M Kosmos 2485 / GLONASS 747 Plesetsk 26.04.2013 2013-019A Uragan-M Kosmos 2491 / GLONASS 754 Plesetsk 23.03.2014 2014-012A Uragan-M Kosmos 2500 / GLONASS 755 Plesetsk 14.06.2014 2014-032A Uragan-M
Kosmos 2501 / GLONASS 702K Plesetsk 30.11.2014 2014-075A Uragan-K1
2.1.2.2. GLONASS Sisteminin Amacı ve Öncesi:
Sistem, gerçek zamanlı uydu verileri kullanılarak dünya üzerinde bulunulan bir yerin yüksek doğruluklu konumunu koordinat sistemi aracılığıyla hızlı bir Ģekilde bulmak amacıyla tasarlanmıĢtır. Sovyet ordusunda balistik füzelerin seyir konumunun belirlenmesi ve hedeflenmesi için oluĢturulan ikinci nesil uydu konumlandırma sistemi olup, Tsiklon sistemleri üzerinde geliĢtirmiĢlerdir.
23
Sistemin öncesinde, Tsiklon (Resim 2.4) adı verilen 4 uydu ile çalıĢan ilk Rus konumlama sistemi; 15 Mayıs 1967 (Cosmos 158) ve 27 Temmuz 1978 (Cosmos 1027) tarihleri arasında yörüngeye yerleĢtirilmiĢtir. Küresel çapta olmasada bölgesel çapta olan ve yönlendirilebilir özellikte uydulardan oluĢan Tsiklon (anlamı: Siklon) Sovyetler'in ilk uydu konumlandırma sistemi olmuĢtur.
COSMOS adı verilen ilk GLONASS uydusu, 12 Ekim 1982'de uzaya fırlatılmıĢtır. Sistem, GPS'e benzer nitelikte birimlerden oluĢmaktadır (URL 2.16).
2.1.2.3. GLONASS Sisteminin GeliĢimi ve Geleceği:
Rusya Federasyonu, 20 Ağustos 2001’de GLONASS konumlama sisteminin iyileĢtirilmesi çalıĢmalarına baĢlamıĢtır. Söz konusu çalıĢma ile GLONASS konumlama hassasiyetinin GPS'in hassasiyetinden daha kötü durumda olması, atom saatlerinin performansı, sistemde bulunan uydu sayısı ve yer kontrol biriminin takip edilmesi, izlenmesi ve sistemin Rusya topraklarıyla sınırlı kaldığı da dahil olmak üzere birçok etkenin iyileĢtirilmesi amaçlanmıĢtır. 2020 yılına kadar GLONASS’ın sistemin tüm uydularının yeni Code Division Multiple Access (CDMA) ve eski Frequency Division Multiple Access (FDMA) sinyallerini yayınlaması tasarlanmaktadır.
GLONASS uyduları, diğer konumlama sistemlerinin kullandığı CDMA'nın aksine Frequency Division Multiple Access (FDMA) yöntemine dayanan navigasyon sinyallerini iki frekans alt-bandında (L1 ~ 1602 MHz ve L2 ~ 1246 MHz) iletmektedir. Yüksek hassasiyet, sinyal yansıma hatası ve bilhassa GPS, GALILEO ve diğer GNSS sistemleri ile çalıĢma uyumluluğunu arttırmayı amaçlayan yeni GLONASS-K uyduları, sistemin eski FDMA sinyallerine ilave olarak CDMA sinyallerini de iletecektir (URL 2.17).
GLONASS uzay bölümü güncellemesi çalıĢmalarına, ikinci sürüm olan GLONASS-M uyduları ile baĢlanmıĢtır. Yeni filtreler, out-of-band emisyonlarının azalmasına ve 24 saat boyunca atomik saat kararlılığının 5x10-13
'ten 1x10-13'e yükselmesine olanak vermiĢrir. Sistemdeki mevcut uyduların yenilenmesi maksadı ile değiĢtirilmesi düĢünülmüĢ ve 2013 yılı Nisan ayında ilk GLONASS-M uydusu yörüngesine gönderilmiĢtir (Revnivykh, 2010), (URL 2.18).
26 ġubat 2011’de sistemin üçüncü sürüm uydusu GLONASS-K1 hizmet vermeye baĢlamıĢtır. Ġkinci K1 uydusu 30 Kasım 2014 tarihinde yörüngeye
24
yerleĢtirilmiĢtir. Akabinde 10 yıl kullanma süresi bulunan ve L3 bandında 1205 MHz frekanslı CDMA sivil sinyalini ileten 9 tane daha GLONASS-K1 uydusu yörüngersine gönderilmiĢtir. Ġkinci sürüm olan GLONASS-K1 uydusu, 15 ġubat 2016 tarihinde, altı numaralı kanalda, sisteminin ikinci düzlemindeki dokuzuncu yörüngesinden veri yayın yapmaya baĢlamıĢtır (URL 2.19).
2014 yılında GLONASS-K2 uydularının yörüngede olması tasarlanmıĢtı. Ancak plana uyulamayarak iĢlem 2018'e sarkıtılmıĢtır. GLONASS-K2 uydularının 10 yıl hizmet süresine ve 5-1x10-14 saatlik hassasiyete sahip olması planlanmıĢtır. L3 bandındakiCDMA sinyallerine ilave olarak, L1 ve L2 bandlarında da CDMA sinyalleri yayınlayacaktır. GLONASS-K uyduları eski FDMA ve yeni CDMA sinyallerini yayınlayabilecektir.
GLONASS-K2 (Uragan-K2) uydu sürümü GLONASS-K1 (Uragan-K1) uydularının modernize edilmiĢ versiyonudur. GLONASS-K2 uydu serisinin, 2017 yılı sonuna kadar yörünge iĢlemlerinin bitirilmesi ve 2020 yılından sonra K1 uydularının yerine kullanılması kararlaĢtırlımıĢtır (Tablo 2.4).
25
Glonass (Uragan) uydularının son sersi olan, GLONASS-KM uyduları konumlama sisteminin yeteneklerini arttıracaktır. Yalnız bu uydu serisinin 2020'li yıllardan daha erken sisteme dahil olmayacağı belirtilmiĢtir (Revnivykh, 2010).
Sistemin yörünge doğruluğunun artırılası için altı tanesi Rusya sınırları dıĢında olacak Ģekilde, ilk olarak Antarktika'ya kurulan referans istasyonu ile 15 yeni referans istasyonunun daha faaliyete geçmesi tasarlamaktadır (ġekil 2.6).
ġekil 2.6 GLONASS zemin birimi (Revnivykh, 2008) SCC: System Control Centre (Sistem Kontrol Merkezi)
TT&C:Telemetry, Trackingand Command (Telemetri, Ġzleme ve Komuta)
SLR: Laser Ranging Stations (Lazer DeğiĢen Ġstasyonlar)
MMS: Monitoringand Measuring Stations (Ġstasyonları Ġzleme ve Ölçme) ULS: Uplink Station (Uplink Ġstasyonu)
MS: Monitoring Station (Ġzleme Ġstasyonu) CC: Central Clock (Merkez Saat)
Yapılan iyileĢtirmeler neticesinde 2008 yılında yörünge doğruluğunun 120 mm’den, 2009 yılı sonu itibarı ile 85 mm düzeyine indiği açıklanmıĢtır (Langley 2010), (URL 2.21).
GLONASS’ın koordinat sitemi, diğer GNSS’ler ile uyumlu bir Ģekilde çalıĢmayı sağlamak için ITRF (International Terrestrial Reference System) sitemine bağlanmıĢtır (URL 2.22).
26 Sinyal Modernizasyonu:
GLONASS uyduları, diğer tüm GNSS sistemlerinin kullandığı CDMA'nın aksine FDMA tekniğine dayanan navigasyon radyo sinyallerini iki frekans alt-bandında (L1 ~ 1602 MHz ve L2 ~ 1246 MHz) iletmektedir.
Daha iyi doğruluk, multipath etkisi ve özellikle GPS, GALILEO ve diğer GNSS Sistemleri ile daha uyumlu çalıĢabilirlik hedefleyen yeni GLONASS-K uyduları, sistemin geleneksel FDMA sinyallerine ek olarak CDMA sinyallerini de iletecektir. Aslında, ilk GLONASS K1 uydusunun baĢarılı bir Ģekilde kullanıma girmesinden bu yana, yeni L3 CDMA sinyali birçok alıcı tarafından kullanılmakta ve izlenmektedir. GLONASS L3 sinyali, Aeronautical Radio 1 Navigasyon Servisi'ne (ARNS) tahsis edilen bölgede Galileo / BeiDou sinyali E5b ile aynı frekansta 1207.14 MHz'de yayınlanmaktadır. Bu bantlar, diğer kullanıcıların sinyallere müdahale etmesine izin vermemesi nedeniyle, Safety-of-Life uygulamaları için uygundur.
Gelecekteki GLONASS K2 uyduları, orijinal FDMA sinyalleri yanı sıra dört ilave CDMA sinyali sunacaktır. Bunların ikisi, askeri kullanımlar için 1242 MHz (L2 band) ve 1575.42 MHz (L1 band)’da bulunan karıĢtırılmıĢ sinyaller olup, diğer ikisi sivil amaçlı 1575.42 MHz (L1 band) ve 1207.14 MHz (L3 band)'da bulunan açık sinyallerdir.
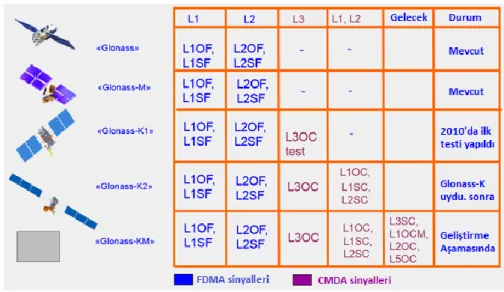
Modernize edilmiĢ GLONASS-K uyduları ve 2015'den sonra fırlatılacak olan modern GLONASS-KM uyduları, GPS L5 sinyali ve Galileo E5a sinyali ile aynı 1176.45 MHz frekansında L5 sinyali iletebilecektir (URL 2.23), (Tablo 2.5).
27
FDMA (Frequency Division Multiple Access ) Sinyalleri:
Sistem iki tür sinyal ile çalıĢmaktadır.
Açık sinyal (standart duyarlılık sinyali - standart precision - SP)
KarartılmıĢ/gizli sinyal (yüksek duyarlı sinyali - obfuscated high precision - HP)
GLONASS sinyalleri, DSSS Ģifrelemesi kullanılarak BPSK modülasyonu ile GPS sinyallerinde olduğu gibi aktarılmaktadır. Tüm uydular kendi standart duyarlılık sinyali olarak aynı kodu iletmektedir. Ancak her biri L1 bandı olarak bilinen 1602,5625 MHz ile 1615,5 MHz aralığında ki 15 kanallı frekans bölmeli çoklu eriĢimli (Frequency Division Multiple Access - FDMA) kullanarak farklı bir frekans üzerinden iletmektedir (URL 2.24).
CDMA (Code Division Multiple Access) Sinyalleri:
Yeni, Code Division Multiple Access (CDMA) sinyalleri 2008 yılından bu yana, GLONASS'ta kullanılmak üzere geliĢtirilmiĢtir.
GLONASS araĢtırmacılarının ön açıklamalarına göre, üç açık ve iki karartılmıĢ CDMA sinyali olacaktır. 2025'e gelindiğinde GLONASS-KM uyduları devreye alınacaktır. Ayrıca bu uydular için ek açık sinyalleri de destekleyecek Ģekilde çalıĢmalar yapılmaktadır. Sinyaller, GPS sinyalleri L5 ve L1C ve Galileo ve Compass sinyallerine karĢılık gelen aynı frekanslara ve biçimlere dayalı E1, E5a ve E5b sinyalleri gibi Ģunları içerecektir:
GeliĢtirilmiĢ GPS sinyali L1C ve Galileo / Compass sinyalleri E1'e benzer 1575,42 MHz frekansta ortalanan BOC (1,1) modülasyonu kullanacak Açık L1OCM sinyali.
GPS sisteminin, L5 (Safety of Life) sinyaline benzer 1176,45 MHz ortalanmıĢ ve Galileo / Compass sinyali E5a 'ya benzer BPSK (10) modülasyonlu L5OCM açık sinyali.
Açık L3OCM sinyali Galileo / Compass E5b sinyaline benzer, 1207,14 MHz ortalanmıĢ BPSK (10) modülasyonu kullanacaktır.
28
Böyle bir düzenleme ile çoklu standarda uygun GNSS alıcılarının daha kolay ve daha düĢük maliyetli donanımı sağlanacaktır.
Uydu sistemi, 2025 yılında kadar CDMA sinyallerinin kullanıma sunulması ile 30 etkin uyduya geniĢletilmiĢ olacak, ancak bu FDMA sinyallerinin önerilmemesine neden olabilecektir. Yer kontrol istasyonları ağına dayalı ve Diferansiyel Düzeltme ve Ġzleme (SDCM) konum güçlendirme sistemi (GNSS augmentation system) yardımıyla görev yapacak yeni haberleĢme uyduları Luch 5A ve Luch 5B gibi uydular için, Ģimdiki üç düzleme ek üç düzlem ilavesi ile toplam düzlem sayısı altıya çıkacaktır. Ek uydular, Molniya yörünge, Tundra yörünge, Yer eĢzamanlı yörünge ya da Japon QZSS sistemindekine benzer, bölgesel olarak güçlendirilmiĢ konum verisi sunmak için, eğik yörüngede konumlandırılacaklardır (URL 2.24).
GLONASS Uzay Birimi:
Modern bir GLONASS-K uydusu (GLONASS-KM), L1 ve L2 üzerindeki eski FDMA sinyallerini ve L1, L2 ve L3 üzerindeki CDMA sinyallerini iletmektedir. Ayrıca 1176,45 MHz'de GPS L5 frekansında CDMA sinyalleri gönderebilmektedir. GNSS doğruluk verileri, üçüncü sivil sinyallerde, küresel diferansiyel efemerisinde ve zaman düzeltmelerinde de yayınlanabilmektedir.
Aynı zamanda, eski FDMA sinyallerinin kapatılmasını gerektirecek mevcut üç düzlemli, eĢit aralıklı uydu sistemlerine bir alternatif de incelenmektedir (URL 2.25).
Uragan-KM / GLONASS-KM:
Uragan uydularının bir baĢka ve son versiyonu olan, GLONASS-KM olarak bilinen uydular navigasyon ağının kabiliyetini daha da geniĢletecektir. Ancak bu uydu sürümün 2020'li yıllardan önce kullanılamayacağı belirtilmektedir (URL 2.26).
29
2.1.3. GALĠLEO (Alternatif Uydu Yönleyici Sistemi):
2.1.3.1. Galileo Konumlama Sistemi:
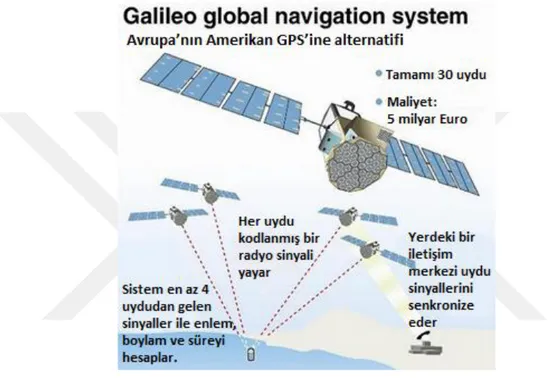
Galileo konumlama sistemi Avrupa Birliği’nin kontrolündeki, küresel ve bağımsız olarak çalıĢan uydu tabanlı bir navigasyon sistemidir (ġekil 2.7). Galileo sistemi, uyumlu alıcıları bulunan kullanıcılara çeĢitli hizmetler sağlayacaktır. Sistemi 30 uydudan oluĢacak Ģekilde tasarlanmıĢtır (URL 2.27).
ġekil 2.7 Galileo konumlama sistemi
Galileo, Avrupa Birliği tarafından ABD Ordusunun denetimi altındaki GPS (Küresel Konumlama Sistemi) ile Rus GLONASS'a alternatif uydu yönleyici sistemidir. Toplam 30 adet uydunun dünya yörüngesine yerleĢtirilerek hizmet vermesi düĢünülen sistemin ilk uydusu 2005 yılında uzaya gönderilmiĢtir.
ġu an itibariye kullanılmakta olan GPS sistemi ABD Ordusunun kontrolünde olduğu için ordu, savaĢ veya harekât gibi durumlarda uydularının yerini değiĢtirebilmekte veya kullanım dıĢı bırakabilmektedir. Galileo'da ise Avrupa Birliği yada Avrupa Uzay Ajansı (ESA) bu tür bir karar almayacaktır.
30
Galileo sisteminin tasarısı 1999 yılında Almanya, Fransa, Ġtalya ve Ġngiltere'den gelen dört farklı tasarı önerisinin değerlendirilmesiyle baĢlamıĢtır. 26 Mayıs 2003 tarihinde Avrupa Birliği ve Avrupa Uzay Ajansı tasarıyı resmi olarak üstlenmiĢtir.
Resim 2.5 Galileo sistemine ait iki uydu
Tasarıya göre her biri yaklaĢık 675 kg ağırlığında ve boyutları 2,7 m x 1,2 m x 1,1 m olan 30 uydu, üç yörünge hattına ve 23.222 km irtifaya fırlatılacaktır. Tasarıda öngörüldüğü üzere uyduların ömrü 12 yıldan daha fazla olacaktır (Resim 2.5).
ÇalıĢma esnasında Galileo, Ġtalya Fucino ve Almanya Münih yakınlarındaki iki yer operasyon merkezini kullanacaktır.
21 Ekim 2011 tarihinde dört operasyonel uydudan ilk ikisi sistemi doğrulamak için devreye alınmıĢtır. Sonraki iki uydu Galileo'yu ayrıntılı bir Ģekilde sınamak için 12 Ekim 2012 tarihinde devreye girmiĢtir. Bu Yörünge Doğrulama (IOV - In-Orbit Validation) aĢaması tamamlandıktan sonra, ek uydular orta-onlu takım olarak yörünge etrafında Ġlk Operasyonel Yeteneğine (IOC) ulaĢmak için çalıĢtırılacaktır. Sadece Galileo uydularından yayılan sinyallere dayanarak ilk konum belirlenmesi 12 Mart 2013 tarihinde gerçekleĢtirilmiĢtir. 30 uyduluk Galileo sisteminin (27 operasyonel ve 3 etkin yedek uydu) tamamlanması için 2019 yılı beklenmektedir.
Bir baĢka özellik olarak, Galileo benzersiz bir küresel arama ve kurtarma (SAR) iĢlevi sağlayacaktır. Uydular daha sonra kurtarma operasyonu baĢlatılıp Kurtarma EĢgüdüm Merkezi, kullanıcının vericiden tehlike sinyallerini alacak Ģekilde bir transponder ile donatılmıĢ olacaktır. Aynı zamanda sistem kullanıcılara, durumları tespit edilmiĢ ve yardımın yolda olduğunu bildiren bir sinyal gönderecektir. Bu son özellik,
31
kullanıcıya geri bildirim vermeyen GPS ve GLONASS konumlandırma sistemleri ile karĢılaĢtırıldığında büyük bir geliĢme olarak kabul edilmektedir (URL 2.28).
2.1.3.2. Galileo Sisteminin Altyapısı:
Orta Dünya Yörüngesindeki (MEO) 30 uydudan oluĢmaktadır. Her uyduda bir navigasyon yükü ve bir arama kurtarma transponderi bulunmakta;
Saat eĢgüdümü ve yörünge ölçümleri için kapsama alanı oluĢturan küresel Galileo Sensor Stations (GSS) ağı;
Ġki Kontrol Merkezi ve iki fırlatma öncesi operasyon (LEOP) Merkezi; Bir Görev yerleĢim istasyonları ağı;
Bir kaç Telemetri, Ġzleme ve Kontrol (TT & C) istasyonları (ġekil 2.8).
Galileo sisteminin altyapısı, kullanıcı birimini oluĢturan kullanıcı alıcıları tarafından tamamlanacak Ģekilde Uzay Birimi ve Zemin Birimi olmak üzere üç bölüm halinde düzenlenmiĢtir (URL 2.29).
ġekil 2.8 Galileo konumlama sisteminin alt yapısı Ġlk Deneysel Uydular (GIOVE-A ve GIOVE-B):
Ġlk deneysel uydu GIOVE-A, 2005 yılında fırlatılmıĢtır ve ikinci deneysel uydu GIOVE-B, 2008 yılında onu izlemiĢtir (Resim 2.6, 2.7). Bu Yörünge Doğrulama (IOV - In-Orbit Validation) aĢaması tamamlandıktan sonra, ek uydular fırlatılacaktır. 30 Kasım 2007 tarihinde ilgili 27 AB UlaĢtırma Bakanı, 2013 yılında faaliyete girecek bir anlaĢmaya varmıĢtır ancak daha sonra bu anlaĢmanın 2014 yılına ertelendiği duyurulmuĢtur. (URL 2.28).
32
Resim 2.6 GIOVE-A uydusu Resim 2.7 GIOVE-B uydusu
2.1.3.3.Galileo Uyduları Listesi:
Yörüngesine yerleĢtirilmiĢ olan ve fırlatılması planlanan Galileo uyduları listesi (Tablo 2.6).
Tablo 2.6 Galileo uyduları listesi (URL 2.30)
No Uydu
Fırlatma Tarihi /
(UTC)
Fırlatma /
Üssü TaĢıyıcı Araç Yörüngesi Durumu
1 GIOVE-A 28.12.2005 Baikonur31/6
Soyuz-FG/Fregat Test
Emekli 30 June 2012 05:19
2 GIOVE-B 26.04.2008 Baikonur 31/6
Soyuz-FG/Fregat Test Emekli 23 July 2012 22:16 3 Galileo-IOV PFM 21.10.2011 KourouELS Soyuz-STB/Fregat-MT B05 ĠĢlemde 10:30 4 Galileo-IOV FM2 21.10.2011
Kourou ELS
Soyuz-STB/FregatMT B06 Kullanılmaz 10:30
5 Galileo-IOV FM3
12.10.2012
Kourou ELS
Soyuz-STB/FregatMT C04 ĠĢlemde 18:15
6 Galileo-IOV FM4
12.10.2012
Kourou ELS
Soyuz-STB/Fregat-MT C05 Kullanılmaz 18:15
7 Galileo-FOC FM1
22.08.2014
Kourou ELS
Soyuz-STB/Fregat-MT N/A Hazırlık AĢamasında 12:27 8 Galileo-FOC FM2 22.08.2014
Kourou ELS
Soyuz-STB/Fregat-MT N/A
Hazırlık AĢamasında 12:27
9 Galileo-FOC FM3 27.03.2015 Kourou ELS
Soyuz-STB/Fregat-MT B08 ĠĢlemde 21:46
33 No Uydu Fırlatma Tarihi / (UTC) Fırlatma /
Üssü TaĢıyıcı Araç Yörüngesi Durumu
10 Galileo-FOC FM4
27.03.2015
Kourou ELS
Soyuz-STB/Fregat-MT B03 ĠĢlemde 21:46
11 Galileo-FOC FM5
11.09.2015
Kourou ELS
Soyuz-STB/Fregat-MT A08 Hazırlık AĢamasında 02:08 12 Galileo-FOC FM6 11.09.2015
Kourou ELS
Soyuz-STB/Fregat-MT A05 Hazırlık AĢamasında 02:08 13 Galileo-FOC FM8 17.12.2015
Kourou ELS
Soyuz-STB/Fregat-MT C02 Hazırlık AĢamasında 11:51 14 Galileo-FOC FM9 17.12.2015
Kourou ELS
Soyuz-STB/Fregat-MT C07
Hazırlık AĢamasında 11:51
15 Galileo-FOC FM7 2016 KourouELA-3 Ariane 5ES
16 Galileo-FOC FM10 2016 Kourou ELA-3 Ariane 5ES
17 Galileo-FOC FM11 2016 Kourou ELA-3 Ariane 5ES
18 Galileo-FOC FM12 2016 Kourou ELA-3 Ariane 5ES
19 Galileo-FOC FM13 2016+ Kourou ELA-3 Ariane 5ES
20 Galileo-FOC FM14 2016+ Kourou ELA-3 Ariane 5ES
21 Galileo-FOC FM15 2016+ Kourou ELA-3 Ariane 5ES
22 Galileo-FOC FM16 2016+ Kourou ELA-3 Ariane 5ES
23 Galileo-FOC FM17 2016+ Kourou ELA-3 Ariane 5ES
34 No Uydu Fırlatma Tarihi / (UTC) Fırlatma /
Üssü TaĢıyıcı Araç Yörüngesi Durumu
25 Galileo-FOC FM19 2016+ Kourou ELA-3 Ariane 5ES
26 Galileo-FOC FM20 2016+ Kourou ELA-3 Ariane 5ES
27 Galileo-FOC FM21 2016+ Kourou ELA-3 Ariane 5ES
28 Galileo-FOC FM22 2016+ Kourou ELA-3 Ariane 5ES
29 Galileo-FOC FM23 2016+
2.1.3.4. Galileo Sisteminin GeliĢimi ve Geleceği:
Galileo projesi ile oluĢturulan sistem, otonom navigasyon ve konumlama hizmetleri sağlarken, GPS ve GLONASS gibi diğer GNSS sistemleri ile uyumlu bir Ģekilde çalıĢabilecektir.
Galileo projesi, Avrupa Birliği tarafından yapılan bir proje olsa da bu büyük ve önemli projeye Avrupa ülkesi olamayan devletler de zamanla katılmıĢlardır. 2003 yılı Eylül ayında Çin, 2004 yılı Haziran ayında Ġsrail, 2005 yılı Haziran ayında Ukrayna, 2005 yılı Eylül ayında Hindistan ve Fas, 2006 yılında Güney Kore ve AB üyesi olmayan Avrupa ülkesi Norveç Galileo programına katılmıĢtır.
Avrupa Birliği üyesi olan 27 ülke uzun süren tartıĢmaların sonunda 2007 yılında toplu olarak Galileo programa katılmıĢlardır. Projenin ilk zamanlarında projeye dahil olmayı istemeyen Ġspanya’nın da katılması ile projenin finansman sorunları kalmaıĢ olup, Galileo Avrupa Birliği projesi halini almıĢtır. Arjantin, Avustralya, Brezilya, Japonya, Kanada, Malezya, Meksika, Pakistan, Rusya ve ġili de Galileo programına katılabileceklerini belirtmiĢlerdir (URL 2.31).
Galileo konumlama sisteminin çalıĢmaları halen Avrupa Uzay Ajansı (ESA) tarafından planlanan bir program olan European GNSS Evolution Programme (EGEP) kapsamında devam etmektedir. Programın ilk hedefi, Space-Based Augmentation