Elektrikli taşıtlarda enerji yönetim stratejilerinin, güç dönüştürücülerinin ve bağlantı topolojilerinin performans ve verimlilik üzerine etkisi
Tam metin
Şekil
![Çizelge 2.1 YH çeşitleri ve özellikleri YH türü Çalışma sıcaklığı [ 0 C] Elektrolit türü Yakıt türü Oksitleyici türü Verim (%) Alkalin YH 70-100 Potasyum](https://thumb-eu.123doks.com/thumbv2/9libnet/3254794.8319/18.892.130.815.139.568/çizelge-çeşitleri-özellikleri-çalışma-sıcaklığı-elektrolit-oksitleyici-potasyum.webp)






Benzer Belgeler
• Kretin fosfat depoları da bitince karbonhidratlar (glikoz veya glikojen) parçalanarak ATP resentezi için gerekli enerji sağlanır. • Bu işlem oksijen gerektirmediği
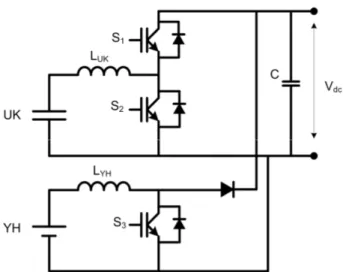
Batarya veya UC’nin bir DC-DC dönüştürücü üzerinden DC baraya paralel bağlanmasıyla oluşturulan düzene yarı aktif bağlantı modeli denilmektedir.. Bu
Güç depolamada ve ısıl enerji depolamada daha yüksek enerji depolama kapasitesine sahip, ucuz, yerli ve modüler yapıda kolay uygulanabilir özellikli
Birleşik rsı üretimi, enerjinin rasyonel kullanı mr için bir yöntem olarak birincil enerji tüketiminde önemli oranlarda enerji tasarrufu sağlamaktadır Hidrolik,
r) kuvvet klin1esi li zcrinde tanllnlantlll$
Sl<;anlara ait yuksek dereceli glial tiimorlerin olu~turuldugu rutin deneysel <;ah~malarda kullamlan C6 hucre kulturu, normal bagl~lkhga sahip Sl<;an beyinlerine
Kısakürek’in, Kasım Gülek aleyhine yazmış olduğu “ H ain” başlıklı yazıdan dolayı açılan dava ise 1 yıl hapis ve 3 bin lira para cezasına
32 YILDIR KÖŞE YAZARI — Oktay Akbal (solda), Atilla Özkırımlı’yla söyleşisinde köşe yazarlığının sorunlarını
