T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
GPS DESTEKLĠ MOBĠL
YERSEL FOTOGRAMETRĠ SĠSTEMĠ Ġbrahim ASRĠ
DOKTORA TEZĠ
Harita Mühendisliği Anabilim Dalı
ġubat-2011 KONYA Her Hakkı Saklıdır
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
Ġbrahim ASRĠ Tarih: 23.02.2011
iv ÖZET
DOKTORA TEZĠ
GPS DESTEKLĠ MOBĠL YERSEL FOTOGRAMETRĠ SĠSTEMĠ Ġbrahim ASRĠ
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Harita Mühendisliği Anabilim Dalı
DanıĢman: Yrd. Doç. Dr. ÖzĢen ÇORUMLUOĞLU
2011, 107 Sayfa Jüri
Doç. Dr. Mustafa TÜRKER Doç. Dr. Ġbrahim KALAYCI Doç. Dr. S.SavaĢ DURDURAN Yrd. Doç. Dr. ÖzĢen ÇORUMLUOĞLU
Yrd. Doç. Dr. Taner ÜSTÜNTAġ
GeliĢen algılayıcı sistemler ve hızla artan konumsal bilgi ihtiyacı karĢısında harita yapım sistemlerinin de vizyonu sürekli değiĢmektedir. Buna paralel olarak günümüz harita üretim sektörü için hareketli platformlar üzerinde birkaç farklı algılayıcının bir araya geldiği doğrudan konum bilgisini üreten sistemler geliĢtirilmektedir.
Bu sistemlerin en belirgin kombinasyonu ise GPS ve Fotogrametri tekniklerinin birlikte kullanılmasıdır. Bunun yanında bu teknolojilerin pahalı algılayıcılardan oluĢması araĢtırmacıları düĢük maliyetli sistem kullanımına yönetmektedir.
Bu tez çalıĢmasında pahalı sistemlere nazaran oldukça ucuz maliyetli konumu belirlenecek noktanın yanına varmadan doğrudan konum bilgisi üretecek GPS Destekli Mobil Yersel Fotogrametri Sistemi tasarlanmıĢ, oluĢturulmuĢ, testleri yapılmıĢ ve görüntü eĢleme tekniği ile de desteklenmiĢtir.
Anahtar Kelimeler: Mobile Harita Yapımı, GPS, Fotogrametri, DüĢük Maliyetli, Görüntü EĢleme, Sanal Kamera, Sanal Kontrol noktası
v ABSTRACT
Ph.D THESIS
GPS SUPPORTED MOBILE TERRESTRIAL PHOTOGRAMMETRY SYSTEM
Ġbrahim ASRĠ
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF DOCTOR OF PHILOSOPHY IN GEOMETICS ENGINEERING
Advisor: Asst. Prof. Dr. ÖzĢen ÇORUMLUOĞLU 2011, 107 Pages
Jury
Assoc. Prof. Dr. Mustafa TÜRKER Assoc. Prof. Dr. Ġbrahim KALAYCI Assoc. Prof. Dr. S. SavaĢ DURDURAN Asst. Prof. Dr. ÖzĢen ÇORUMLUOĞLU
Asst. Prof. Dr. Taner ÜSTÜNTAġ
Impacts of advanced technology and rapidly increasing needs of today‟s societies to information change the vision of mapping technologies. We now see some integrated systems which combine several surveying receivers and sensors on a moving platform and provide spatial coordinates directly.
This kind of combined systems commonly uses photogrammetric and GPS techniques together. On the other hand, researchers tend to find most economical combinations since those previously developed systems are highly cost effected.
In this study, contrary to expensive system, a combined system which is cheap, utilizes GPS and terrestrial photogrammetry and does not need to be touched to the details was developed and tested and also supported by digital image matching.
Keywords: Mobile Mapping, GPS, Photogrammetry, Low Cost, Image Matching, Virtual Camera, Virtual Control Point
vi ÖNSÖZ
Akademik hayatın en önemli eĢiklerinden biri olan bu doktora çalıĢmasında akademik hayatımın baĢından bu zamana kadar bana danıĢmanlık yapan tez çalıĢmasının her adımında maddi ve manevi desteğini esirgemeyen değerli hocam Yrd.Doç.Dr. ÖzĢen ÇORUMLUOĞLU‟ na, yine özellikle GPS konusunda ve tezin uygulama konusunda ayrıca birçok aĢamasında emeği geçen Doç.Dr. Ġbrahim KALAYCI hocama öncelikle Ģükranlarımı sunarım.
Yazılım konusunda desteklerini esirgemeyen Doç. Dr. Temel BAYRAK, Yrd.Doç.Dr. Fevzi KARSLI, Dr. Abdullah VARLIK, ArĢ. Gör. Mustafa DĠHKAN‟ a teĢekkür ederim.
Bunun yanında burada ismini sayamadığım maddi manevi desteğini esirgemeyen birçok hocalarım, arkadaĢlarım ve yakınlarıma da teĢekkür ederim.
Son olarak her aĢamada beni sabır ve muhabbetle destekleyen kıymetli ailem, eĢim ve çocuklarıma teĢekkürü borç bilirim.
Ġbrahim ASRĠ KONYA-2011
vii ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii KISALTMALAR ... ix ġEKĠLLER DĠZĠNĠ ... x TABLOLAR DĠZĠNĠ ... xii 1. GĠRĠġ ... 1 2. KAYNAK ARAġTIRMASI ... 3 3. MATERYAL VE METOT ... 13
3.1. Mobil Harita Yapım Sistemleri... 13
3.1.1. Mobil Harita Yapım Sistemlerinin GeliĢimi ... 15
3.1.1.1. Foto-Kayıt (Photo-Logging) ... 15
3.1.1.2. Video-Kayıt (Video-Logging) ... 17
3.1.1.3. Mobil Harita Yapımı (Mobile Mapping) ... 18
3.1.2. Çoklu Algılayıcı Entegre EdilmiĢ Mobil Harita Yapım Sistemleri ... 20
3.1.2.1. Veri toplama ... 20
3.1.2.2. Konum Belirleme ve Harita Yapım Algılayıcıları ... 22
3.1.3. Bazı Özel Mobil Harita Yapım Uygulama Alanları ... 23
3.1.4. Anlık Mobil Harita Yapımı ... 24
3.2. Görüntü EĢleme ... 25
3.2.1. Görüntü ĠĢleme ... 25
3.2.1.1. Epipolar Geometri ... 26
3.2.2. Görüntü EĢleme Tanımı ve Dijital Fotogrametrik Kullanımı ... 27
3.2.3. Görüntü EĢleme Yöntemleri ... 29
3.2.3.1. ġekle (Detaya) Dayalı Görüntü EĢleme ... 29
3.2.3.2. ĠliĢkisel (Sembolik) EĢleme ... 30
3.2.3.3. Alana Dayalı Görüntü EĢleme ... 30
3.2.3.3.1 Alana Dayalı Görüntü EĢleme Yöntemleri ... 31
3.2.4. Affin DönüĢümü ... 36
3.2.5. Ölçeksel DeğiĢmeyen Özellik DönüĢümü (SIFT) Algoritması ... 37
3.2.6. Rastgele Örnek UyuĢumu (RANSAC) Algoritması ... 38
3.3. Ġç ve DıĢ Yöneltme Parametrelerinin Bilinmesi Durumunda Fotogrametrik Matematiksel Model ... 39
3.3.1. Fotogrametrinin Matematiksel Modeli ... 39
3.3.2. Ġç ve DıĢ Yöneltme Parametrelerinin Bilinmesi Durumunda Uzay Geriden Kestirme Çözümü ... 42
3.3.2.1. Mercek Distorsiyon Düzeltmeleri Hesabı ... 44
viii
3.4.1. Yapay Zekâ ... 46
3.4.1.1. Yapay Sinir Ağları ... 46
3.3.1.1.1. Yapay Sinir Ağları Genel Tanımı ... 46
3.4.1.1.2. Yapay Sinir Ağları‟nın Özellikleri ... 47
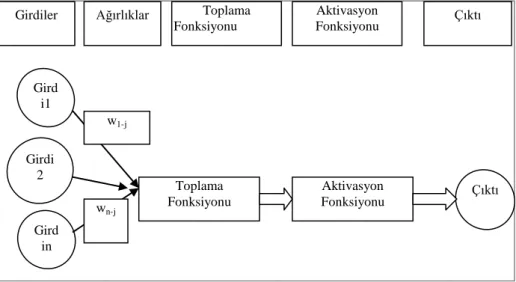
3.4.1.1.3. Yapay Sinir Hücresi ... 47
3.4.1.1.4. Yapay Sinir Ağları‟nda Katmanlar ... 49
3.4.1.1.5. Yapay Sinir Ağları‟nda Öğrenme ... 50
3.4.1.1.6. Çok Katmanlı Algılayıcı Modeli ... 52
3.4.1.1.7. GenelleĢtirilmiĢ Delta Kuralı ... 53
4. GPS DESTEKLĠ YERSEL MOBĠL FOTOGRAMETRĠ SĠSTEMĠ, TANIM, TASARIM VE SĠSTEM ÇÖZÜMLERĠ ... 54
4.1. Sistem ... 54
4.1.1. Sistem Tasarımı ... 55
4.1.2. Sistem oluĢturulması ... 56
4.1.3. Kamera Kalibrasyonu ... 56
4.2. Ġç ve DıĢ Yöneltme Parametrelerinin Bilinmesi Durumunda Uzay Önden Kestirme Yazılımı ve Testi ... 57
4.3. Sistem Geometrisinin Belirlenmesi ... 60
4.4. Platformun Araç Üzerine Monte Edilmesi ... 62
4.4.1. Araç Üzerindeki Sistemin Test Edilmesi ... 64
4.5. Sistem Verilerinin Değerlendirilmesi ... 65
4.6. Sanal Kontrol Noktası Tekniği ... 66
4.7. Kamera KarĢılaĢtırılması ... 70
4.8. Sanal Kamera Çözümü ... 72
4.9. Üç Kameralı Sistem ... 75
4.9.1. Totalstation ve GPS Verilerinden Yapılan Sanal Kontrol Noktası DönüĢümü ile Çözüm. ... 78
4.9.2. Platform Koordinat Sisteminde Çözüm ... 79
4.9.3. Sanal 3. Kamera ile Çözüm ... 80
4.9.4. Platforma Yakın Sanal Kontrol Noktaları Ġle Çözüm ... 81
4.10. Sanal Kontrol Noktalılarının Yapay Sinir Ağları ile Kestirilmesi ... 82
4.11. Nokta EĢleme ... 87
4.12. Sistemin Nihai Testi ve Sistemle Halihazır harita üretimi ... 91
5. SONUÇLAR VE ÖNERĠLER ... 97
KAYNAKLAR ... 101
EKLER ... 108
EK-1 Uzay Önden Kestirme Matlab Kodu ... 108
EK-2 Uzay Geriden Kestirme Matlab Kodu ... 111
EK-3 Sanal Kamera Matlab Kodu ... 116
Ek-4 Üç Kameralı Uzay geriden Kestirme Matlab Kodu ... 119
Ek-5 Üç Kameralı Uzay Önden Kestirme Matlab Kodu ... 125
ix
KISALTMALAR Kısaltmalar
GDMYFS : GPS Destekli Mobil Yersel Fotogrametri Sistemi UGK : Uzay Geriden Kestirme
UÖK : Uzay Önden Kestirme
MHYS : Mobil Harita Yapım Sistemleri
GPS : Global Positioning System- Küresel Konum Belirleme Sistemi RTK : Real Time Kinematic-Gerçek Zamanlı Konum Belirleme YSA : Yapay Sinir Ağları
SIFT : Ölçeksel DeğiĢmeyen Özellik DönüĢümü Algoritması RANSAC : Rastgele Örnek UyuĢumu Algoritması
GÜ : GümüĢhane Üniversitesi
x
ġEKĠLLER DĠZĠNĠ
ġekil 2.1. GPS Van Sistemi ve Kamera Görüntüsü (URL-1) ... 4
ġekil 2.2. VISAT Sistemi (URL-2) ... 5
ġekil 2.3. Immersion ‟94 mobil veri toplama sistemi (Debevec, 1999) ... 6
ġekil 2.4. Elle taĢınabilen MHYS (Ellum, 2001) ... 6
ġekil 2.5. Ġnsan gücüyle taĢınabilen MHYS (Seo ve ark. 2004, Asri 2005, Forlani ve Pinto 2007 ve Remondino 2007) ... 7
ġekil 2.6. Çoklu konum belirleme ve haritalama algılayıcı entegre MHYS (Ishikawa ve ark. 2006) ... 7
ġekil 2.7. Lazer tarayıcı noktalarının fotogrametrik değerlendirme ile beraber kullanıldığı sistem (Alshawa ve ark. 2009) ... 8
ġekil 2.8. Tarihi kayıt için düĢük maliyetli doğrudan yöneltme yapılan fotogrametrik kayıt sistemi ... 9
ġekil 2.9. Roncella ve ark. ‟nın (2005) ataletsel araçlar kullanmadan oluĢturduğu alım sitemi ... 10
ġekil 2.10. Wong (2006) düĢük maliyetli mobil fotogrametrik alım sisteminin görünümü. ... 10
ġekil 3.1. Harita Yapım Uygulamaları için çoklu algılayıcı entegrasyonu (URL -3) .... 14
ġekil 3.2. Eski bir foto-kayıt sistemi (Breyer, ve Lalan, 2006) ... 16
ġekil 3.3. GPS destekli Video-Kayıt Sistemi (Breyer ve Lalan, 2006) ... 17
ġekil 3.4. ġekil 3.3.‟deki Video-Kayıt sisteminin kamera görüntüleri ... 18
ġekil 3.5. Doğrudan konumlandırma konsepti (Tao, 2000) ... 20
ġekil 3.6. Harita yapım amaçlı entegre çoklu algılama sistemi (Özçelik, ve BeĢdok, 2009) ... 23
ġekil 3.7. Görüntü iĢlemenin iĢ akıĢı (Yıldırım, 2003) ... 25
ġekil 3.8. Epipolar sınırlama, epipolar düzlem (P,P‟,P‟‟) ve epipolar doğrular e‟. ve e‟‟. (Heipke, 2005) ... 26
ġekil 3.9. Epipolar eĢleme (Öztürk ve Koçak, 2007). ... 27
ġekil 3.10. Görüntü eĢleme (Öztürk ve Koçak, 2007).. ... 28
ġekil 3.11. KarĢılıklı ĠliĢki prensibi: Sol görüntüde seçilen iliĢki penceresinin sağ görüntüdeki karĢılığının, bir araĢtırma penceresi içerisinde piksel piksel kaydırılarak bulunması (Heipke, 2005) ... 31
ġekil 3.12. Çapraz korelasyon (Öztürk ve Koçak, 2007). ... 32
(3.1) ... 32
ġekil 3.13. KarĢılıklı iliĢki yöntemi kullanılarak yapılmıĢ, doğru sonuç elde edilmiĢ görüntü eĢleme iĢlemi (Varlık ve ark. 2009). ... 33
ġekil 3.14. KarĢılıklı iliĢki yöntemi kullanılarak yapılmıĢ, hatalı sonuç elde edilmiĢ görüntü eĢleme iĢlemi (yanlıĢ eĢleme „mismatch‟) (Varlık ve ark. 2009). ... 33
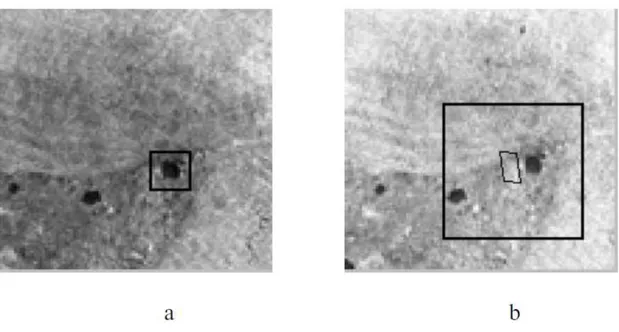
ġekil 3.15. En Küçük Kareler Görüntü EĢleme prensibi; a - ) sol görüntü ve bu görüntüde çizilmiĢ 15x15 piksellik iliĢki penceresi b- ) sağ görüntü ve en küçük karesel eĢleme sonunda iliĢki penceresinin aldığı son konum (Varlık ve ark. 2009). ... 35
xi
ġekil 3.16. En Küçük Kareler Görüntü EĢleme yöntemiyle yapılmıĢ hatalı bir eĢleme
(Varlık ve ark. 2009). ... 35
ġekil 3.17. Fotogrametrinin Matematiksel Modeli (Duran, 2003) ... 39
ġekil 3.18. Yersel Fotogrametrik ĠzdüĢüm (Duran, 2003) ... 40
ġekil 3.19. YSA elemanları (Albayrak, 2011) ... 48
ġekil 3.20. Genel olarak bir YSA yapısı (Albayrak, 2011) ... 50
ġekil 3.21. Çok katmanlı algılayıcı modeli (Albayrak, 2011) ... 52
ġekil 4.1. Google SketchUp programında 3B olarak çizilen platform ... 55
ġekil 4.2. GDMYFS platformu ... 56
ġekil 4.3. PhotoModeler kamera kalibrasyon slaytı ... 57
ġekil 4.4. Laboratuardaki UÖK düzeneği ... 58
ġekil 4.5. Laboratuardaki UÖK düzeneği ve koordinat eksenleri ... 59
ġekil 4.6. Laboratuar duvar ve aletler üzerine yerleĢtirilen kontrol noktaları ve ölçümü ... 59
ġekil 4.7. MYO önünde oluĢturulan test alanı ... 60
ġekil 4.8. Test alanındaki kontrol noktalarının ve alım istasyonlarının dağılımı ... 61
ġekil 4.9. Araç üzerine monte edilen platform ... 63
ġekil 4.10. Araç üzerine monte edilen platformun geometrik yapısının belirlenmesi ... 63
ġekil 4.11. Yerdeki ve duvardaki tesis edilen (Δ) ve serbest ölçülen(O) detay noktaları ... 64
ġekil 4.12. GPS alıcılarının bilgisayar ile kontrolü ... 65
ġekil 4.13. Araç üzerindeki sistemle gerçekleĢtirilen bir alım istasyonu ... 65
ġekil 4.14 a) Test alanındaki kontrol noktalarının oluĢturulması b) Test alanındaki kontrol noktalarının resim üzerindeki görünümü c) Yeni bir alım istasyonundaki sanal kontrol noktalarının dağılımı d) Yeni bir alım istasyonundaki sanal kontrol noktalarının resim üzerindeki görünümü ... 69
ġekil 4.15. Sanal kameranın temsili görüntüsü ... 73
ġekil 4.16. 3 kameralı sistem görünüĢü ... 76
ġekil 4.17. 3 kameralı sistemdeki a) sol resim (Canon 550D) b) sağ resim (Olympus C8080) c) orta yukarıdaki resim (Canon 550D) ... 78
ġekil 4.18. Yapay sinir ağları ile sanal kontrol noktası kestirimi için 40 istasyonlu uzay ... 83
ġekil 4.19. Yapay sinir ağları ile sanal kontrol noktası kestirimi için 120 istasyonlu uzay ... 85
ġekil 4.20. Nokta eĢleme programı arayüzü ... 88
ġekil 4.21. Görüntülerin gri tona dönüĢtürülerek programa yüklenilmesi ... 88
ġekil 4.22. SIFT algoritması ile özellikli noktaların seçimi ... 89
ġekil 4.23. RANSAC algoritması ile ortak noktaların eĢlenmesi ... 89
ġekil 4.24. ĠliĢki ve araĢtırma pencerelerinin seçilmesi ... 90
ġekil 4.25. EĢleme iĢleminin gerçekleĢmesi ... 91
ġekil 4.26. Tesis edilen (Δ) ve serbest ölçülen (O) detay noktaları ... 92
ġekil 4.27. Yakın sanal kontrol noktası için kullanılacak test alanındaki noktalar ... 92
ġekil 4.28. Alım yapılan güzergahın sistemden elde edilen değerlerle çıkartılmıĢ hâlihazır haritası ve resim alım istasyonlarının dağılımı. ... 96
xii
TABLOLAR DĠZĠNĠ
Tablo 2.1. Mevcut konumsal veri toplama tekniklerinin kıyaslanması (Ellum, 2001) .... 3
Tablo 2.2. Dünyadaki bazı mobil harita yapım sistemleri ve özellikleri (Tao 2000, Wong 2006, Ellum 2001) ... 11
Tablo 3.1. EĢleme yöntemleri, benzerlik ölçümleri ve eĢleme varlıkları arasındaki iliĢkiler. ... 30
Tablo 3.2. Biyolojik sinir sistemi ile yapay sinir sistemi arasındaki benzerlikler ... 47
Tablo 4.1. Ölçülen ve hesaplana koordinat değerleri ve farkları ... 60
Tablo 4.2. Sıfıra indirgenmiĢ platform koordinatları ... 61
Tablo 4.3. Platform koordinat sisteminde elde edilen kamera çekim merkezleri ve dönüklükleri. ... 62
Tablo 4.4. Belirlenen sistem geometrisi ile test alanındaki çalıĢabilirlik analizi ... 62
Tablo 4.5. Seçilen 3 istasyondaki ölçülen ve dönüĢümden hesaplanan koordinatlar ile farkları ... 66
Tablo 4.6. Herhangi bir istasyondaki sanal kontrol noktası kullanılarak çözüm ile platform koordinat sistemindeki çözüm farklarının karĢılaĢtırılması ... 70
Tablo 4.7. KarĢılaĢtırılan kameralar ve özellikleri ... 71
Tablo 4.8. Farklı kamera kombinasyonlarının duyarlılıklarının karĢılaĢtırılması ... 71
Tablo 4.9. Hesaplanan ve ölçülen piksel değerleri ... 74
Tablo 4.10. Sanal kamera ile çözüm yapılan dıĢ yönetme parametreleri ... 75
Tablo 4.11. Sanal kamera ile çözümden elde edilen değerlerin karĢılaĢtırılması ... 75
Tablo 4.12. GPS ve Totalstation ile belirlen platform köĢelerinin koordinatlarının karĢılaĢtırılması, ... 76
Tablo 4.13. GPS ve Totalstation verilerinden dönüĢüm ile elde edilen değerlerin karĢılaĢtırılması ... 79
Tablo 4.14. Platform koordinat sisteminde 3 kameralı sistem çözümü koordinat farkları ... 80
Tablo 4.15. Sanal kamera kullanarak yapılan çözüm ile oluĢan koordinat farkları ... 81
Tablo 4.16. Yakın sanal kontrol noktaları ile elde edilen koordinat farkları ... 82
Tablo 4.17. 40 istasyonlu uzayda YSA ile elde edilen test verilerinin karĢılaĢtırılması 84 Tablo 4.18. 120 istasyonlu uzayda YSA ile elde edilen test verilerinin karĢılaĢtırılması ... 86
1. GĠRĠġ
Teknolojik geliĢmeler harita veya konum bilgisi üretim iĢlerine her geçen gün farklı bir nitelik kazandırmaktadır. Özellikle son zamanlarda Coğrafi Bilgi Sistemleri (CBS)‟nin hızlı, az maliyetli ve nitelikli konum ve öznitelik veri ihtiyacını karĢılamak maksadıyla değiĢik veri toplama sistemleri geliĢtirilmeye baĢlanmıĢtır. Algılayıcı sistemlerdeki ve uydu bazlı sistemlerdeki göz kamaĢtırıcı geliĢmeler farklı ölçme ve görüntüleme sistemlerinin bir arada kullanılması durumunu ortaya çıkarmaktadır. Bu çoklu sistemler hava fotogrametrisindeki hareketli ölçme sistemini yersel fotogrametride de uygulama imkânını sağlamıĢtır. Yersel fotogrametrik sistemlere hava fotogrametrisinden daha ziyade hedef objelere yakın olması nedeniyle çok farklı algılama sistemleri entegre edilebilmektedir.
Fotogrametrinin ana amacı, uzaktaki cisimlerin geometrik Ģekil ve konumlarını fotoğraflar yardımıyla elde etmektir. Bu kapsamda fotogrametrik değerlendirme iĢlemi için gerekli ön iĢlem olan yönetmelerin yapılabilmesi için kullanılacak parametrelerin tespiti de önem kazanmaktadır. Bu nedenle cisim üzerine kontrol noktaları tesis edilmekte ve bu kontrol noktalarının jeodezik ölçümünde de jeodezik ağlardan yararlanılmaktadır. Çoğu zaman bu iĢlemler ekonomi ve sürat açısından fotogrametrik değerlendirme iĢlemini olumsuz yönde etkilemekte, en önemlisi de cisimlerin yanına varmadan ölçü elde etme prensibi tam olarak yerine getirilememektedir.
Bütün bu teknolojik geliĢmeler ve fotogrametrinin ana amacına ulaĢmak için yapılan çalıĢmalar zamanla Mobile Harita Yapım Sistemlerini ortaya çıkarmıĢtır. Mobile Harita Yapım Sistemlerinin iki temel bileĢeni bulunmaktadır. Bunlardan birincisi konumlandırma algılayıcıları diğeri ise harita yapım algılayıcılarıdır. Konumlandırma algılayıcıları sistemin konumunu dolayısıyla harita yapım algılayıcısının konumunu bir koordinat sisteminde tespit etmek için, harita yapım algılayıcıları ise uzaktaki cisimlerin konumlarının tespitinde kullanılır. Günümüzde hem harita yapım sistemi hemde harita yapım sistemini konumlardırmak için kullanılan donanım oldukça pahalıdır. Bu nedenle daha ucuz sistemlerin geliĢtirilmesi mobil harita yapım teknolojisinin önemli bir problemi olarak önümüzde durmaktadır. Bunun yanı sıra diğer önemli bir problem ise, yine harita yapım sisteminin konumlandırılmasında karĢımıza çıkan, sistemin referanslandığı ve kullandığı koordinat sistemi eksenleri etrafındaki dönüklüklerin yüksek doğrulukla belirlenmesi problemidir. Ayrıca, bu tür bir çalıĢmaya konu olan diğer bazı temel problemleri tanımlamak gerekirse;
Fotogrametrinin uzaktantığını, yani cisimle baĢka bir deyiĢle hedef obje ile temassızlığının tam anlamıyla sağlanması için kontrol noktası olmadan fotogrametrik yöneltmenin yapılması gereksinimi
Mobil Harita Yapım Sistemlerinin yaygın kullanımı için düĢük maliyetli sistem geliĢtirme gereksinimi
Mobil Harita Yapım Sistemlerinin anlık konum bilgisi üretme eğilimi olarak sıralanabilir.
Bu temel problemlere çözüm olarak yapılan çalıĢmanın baĢlıca amaçları ise;
En yaygın konumlandırma algılayıcılarından GPS kullanılması ile Fotogrametrik değerlendirme için gerekli dıĢ yöneltme parametrelerinin tespit edilmesinde ilk defa bu çalıĢmayla ortaya konan sanal kontrol noktası teknik ve yaklaĢımıyla fotogrametrik çözümün obje ile temassızlığının tamamen sağlanması
DüĢük maliyetli algılayıcılar kullanılarak düĢük maliyetli Mobil Harita Yapım Sistemi geliĢtirmek. Bunun paralelinde düĢük maliyetli algılayıcıların getireceği doğruluk kaybını ise farklı hesaplama teknikleri ile ortadan kaldırmak veya en aza indirmek
Bütün algılayıcılardan (GPS, Dijital Kamera) bilgisayar kontrolü sayesinde anlık veri almak ve dolayısıyla anlık konum bilgisi üretmek Ģeklinde özetlenebilir.
Bu problem ve amaçlar ıĢığında hareketli bir platform üzerinde en yaygın konumlandırma algılayıcılarından GPS ile yine en önemli harita yapım algılayıcılarından dijital kameralar birlikte kullanılarak bir ölçme sistemi tasarlanmıĢ, oluĢturulmuĢ, testleri yapılmıĢ, ortaya çıkan problemlere ise farklı yaklaĢımlarlaçözümler (YSA, sanal kontrol noktası, sanal kamera vb.) aranmıĢ, dijital görüntü eĢleme teknikleri ile ölçülecek detayların diğer görüntüde bulunması desteklenmiĢ, sistem belli bir alanın alımında kullanılarak test edilmiĢ ve sonuçları paylaĢılmıĢtır.
2. KAYNAK ARAġTIRMASI
Son 30 yıllık geçmiĢte konumsal veri ihtiyacında büyük bir patlama görülmüĢtür. Bu ihtiyacı karĢılamak için sayısız kaynak ve yöntem mevcuttur. Artan bu veri ihtiyacını yüksek doğrulukta, yüksek yoğunlukta, hızlı üretim ve daha az maliyetle etkili bir Ģekilde karĢılamak temel vizyon olmuĢtur. Bunun için farklı konumsal veri toplama yöntemleri geliĢtirilmiĢtir. Yersel ölçmeler ve hava fotogrametrik ölçmeler sürekli olarak geliĢmiĢtir. Noktasal konum bilgisi üreten GPS tekniğinin haritacılıkta yoğun kullanımı ile klasik yersel ölçmelerde farklı bir noktaya doğru yönelmiĢ ancak yine düĢük maliyetli ve kısa sürede toplanması istenen konumsal bilgi ihtiyacına tek baĢına cevap vermemiĢtir. Bunun için GPS ve klasik teknikler çeĢitli konumlandırma ve uzaktan algılama gibi çoklu algılama sistemleri ile hava ve karasal platformlarda birleĢtirilerek alternatif ölçme sistemleri geliĢtirilmiĢtir. Bu sistemler Zamanla Mobil
Harita Yapım Sistemleri (MHYS) olarak literatürde yerini almıĢtır.
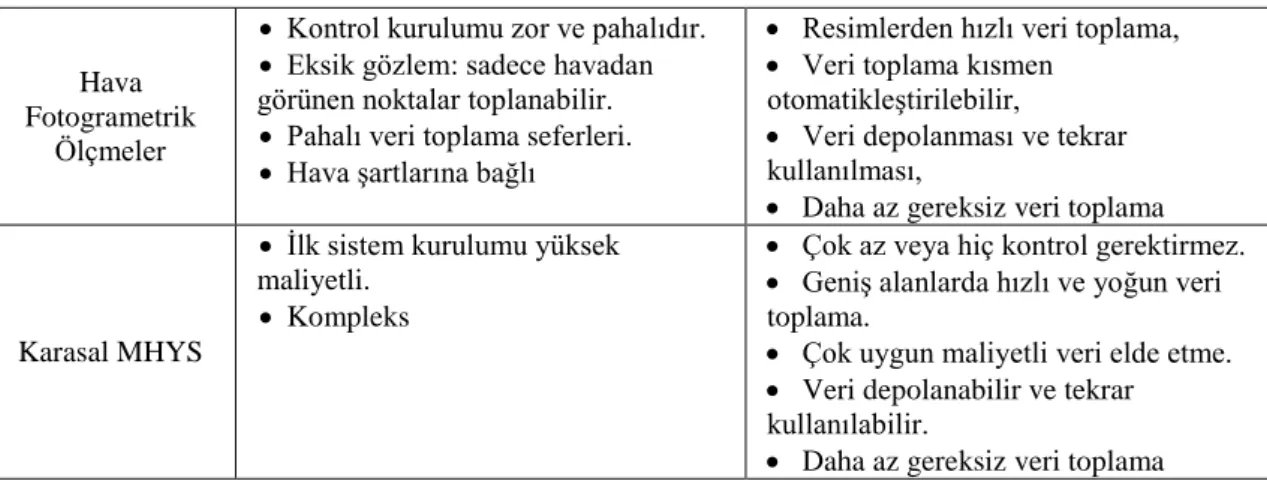
MHYS hem hava hem de karasal sistemler olarak ortaya çıkabilirler Hava MHYS hava Ģartları ve görüntüleme eksiklikleri gibi bilindik hava fotogrametrik yöntemlerle aynı kısıtlamalara sahiptir. Karasal MHYS birçok proje için bilindik karasal veri toplama sistemlerine göre çok daha kullanıĢlı sistemlerdir. KullanıĢlı olması ve hızlı veri toplama açısından klasik karasal tekniklere üstünlük sağladığı gibi görüntüleme sistemlerinin objeye yakınlığı ve hava Ģartlarından daha az etkilenmesi vb. yönünden hava MHYS‟ne üstünlük sağlamaktadır. Bunun yanında azda olsa dezavantajları mevcuttur. Tablo 2.1. de karasal MHYS ile diğer yöntemlerin karĢılaĢtırılması yapılmıĢtır. (Ellum, 2001)
Tablo 2.1. Mevcut konumsal veri toplama tekniklerinin kıyaslanması (Ellum, 2001)
Teknik Dezavantajları Avantajları
Yakın Resim Fotogrametrisi
Yeterli kontrol kurulumu zor ve pahalıdır.
Resimlerden hızlı veri toplama,
Veri depolanması ve tekrar kullanılması
Daha az gereksiz veri toplama Klasik Karasal
Ölçmeler
Yoğun iĢçilik ve yavaĢ,
GeniĢ alanlarda yoğun veri toplamak için uygun değil,
Gereksiz veri toplama
Yüksek rölatif doğruluk
GPS Ölçmeleri
ġehir merkezi ve ağaçlık alanlarda uygun değil,
GeniĢ alanlarda yoğun veri toplamak için uygun değil,
Gereksiz veri toplama
Daha az beceri gerektirir,
Hava Fotogrametrik
Ölçmeler
Kontrol kurulumu zor ve pahalıdır.
Eksik gözlem: sadece havadan görünen noktalar toplanabilir.
Pahalı veri toplama seferleri.
Hava Ģartlarına bağlı
Resimlerden hızlı veri toplama,
Veri toplama kısmen otomatikleĢtirilebilir,
Veri depolanması ve tekrar kullanılması,
Daha az gereksiz veri toplama
Karasal MHYS
Ġlk sistem kurulumu yüksek maliyetli.
Kompleks
Çok az veya hiç kontrol gerektirmez.
GeniĢ alanlarda hızlı ve yoğun veri toplama.
Çok uygun maliyetli veri elde etme.
Veri depolanabilir ve tekrar kullanılabilir.
Daha az gereksiz veri toplama
1970 yıllarda basit konumlandırma teknikleri ile film kameraları ile otoyolların izlemesi ile baĢlayan MHYS sistemleri daha sonra GPS ve video görüntüleme teknolojilerinin geliĢimi ile nitelikli bir sitem haline gelmeye baĢlamıĢlardır. Lapucha ve ark. 1990 yılında GPS/INS entegrasyonu ve video kamera ile bir otoyol ölçme sistemi geliĢtirmiĢlerdir. Mobil Otoyol Envanter Sistemi (Mobile Highway Inventory System: MHIS) adı verilen sitemle yapılan ilk denemede yaklaĢık olarak konum bilgisini 0.5 m, hız bilgisini 10 cm/s, eğim bilgisini % 0.5, ve eğiklik bilgisini 0.2 derece ile elde etmiĢlerdir.
Novak 1990 yılında GPS ve çeĢitli algılayıcıları entegre ettiği otomatik yol çevre bilgileri toplayan hareketli bir stereo görüntüleme sistemi kurmuĢtur (ġekil 2.1.). GPSVan adı verdiği bu sistemde GPS anteni ve görüntüleme sistemleri arasındaki ofseti toplu jeodezik dengeleme ile belirledi. Obje konum doğruluğu ise yaklaĢık 10 cm olmuĢtur.
ġekil 2.1. GPS Van Sistemi ve Kamera Görüntüsü (URL-1)
Schwarz ver ark. 1993 yılında yaptıkları bir çalıĢmada yol envanteri ve CBS uygulamaları için VISAT ismi verdikleri mobil ölçme sistemi geliĢtirmiĢlerdir. INS, çift
frekanslı GPS, CCD kameraların entegre edildiği bu sistemle 50 m'lik bir karayolu koridorunun her iki tarafında 0.3m veya daha iyi doğruluğa ulaĢmıĢlardır. Daha sonra bu sistem 8 CCD kamera 1 SVHS kamera ile geliĢtirilmiĢtir (El-Sheimy ve Schwarz, 1996). Coetsee ve ark. 1994 yılında GPSVan sistemini 1 CCD kamera, 1 SVHS kamera ve düĢük maliyetli INS ile yeniden oluĢturarak dört çekerli araçlar, demir yolu araçları veya deniz taĢıtları ile CBS amaçlı veri toplama uygulamalarında kullanılabileceğini göstermiĢlerdir.
ġekil 2.2. VISAT Sistemi (URL-2)
Birçok kara, deniz vb. araçlarda kullanılan MHYS‟ ler değiĢik uygulamalar için insan gücü ile taĢınabilen platformlar Ģeklinde de oluĢturulmuĢtur. Bunlardan en eskisi Naimark ve ark. tarafından 1994 yılında tekerlek hareketine göre mesafe belirleyen ve iki film kamerası entegreli insan gücü ile çalıĢan Immersion ‟94 adı verilen sistemdir. Bu sistemle elde edilen fotoğrafik verilerden fotorealistik sanal çevre analizleri yapılmıĢtır (Debevec, 1999). Alexander 1996 yılında bir GPS, iki dijital kamera ve dijital kumpasın entegre olduğu 3 boyutlu veri toplama sistemi tasarlamıĢtır.
ġekil 2.3. Immersion ‟94 mobil veri toplama sistemi (Debevec, 1999)
Ellum (2001) yaptığı tez çalıĢmasında insan eliyle taĢınabilen MHYS geliĢtirmiĢtir. GeliĢtirilen bu sistem bir inclinometer, bir dijital manyetik kumpas, çift frekanslı GPS alıcısı ve klasik bir dijital kameranın çok alıcılı bir haritalama sistemi içerisine entegrasyonudur (ġekil 2.4.). Sistemin test edilmesi sonucu mutlak obje uzay konum koordinatlarının doğruluğunu 0.2-0.3 m arasında elde etmiĢtir.
ġekil 2.4. Elle taĢınabilen MHYS (Ellum, 2001)
Ġnsan gücüyle taĢınabilen sistemler birçok amaç için geliĢtirilmiĢtir. Hatta seri üretim entegre sistemler geliĢtirilmiĢtir (ġekil 2.5.) (Seo ve ark. 2004, Asri 2005, Forlani ve Pinto 2007 ve Remondino 2007)
ġekil 2.5. Ġnsan gücüyle taĢınabilen MHYS (Seo ve ark. 2004, Asri 2005, Forlani ve Pinto 2007 ve Remondino 2007)
MHYS‟lerde harita yapım algılayıcısı olarak çoğunlukla görüntüleme algılayıcıları kullanılsa da bunlara ek olarak değiĢik algılayıcılarda uzun süredir kullanılmaktadır. Lazer mesafe ölçerler ( Reed ve ark. 1996, Li ve ark. 1999) veya lazer tarayıcılar (Li ve ark. 2001, Graefe 2001) bunlardan en önemlileridir. Hatta bu yüzden harita yapım algılayıcılarına uzak algılayıcılarda denmektedir (Ellum, 2001).
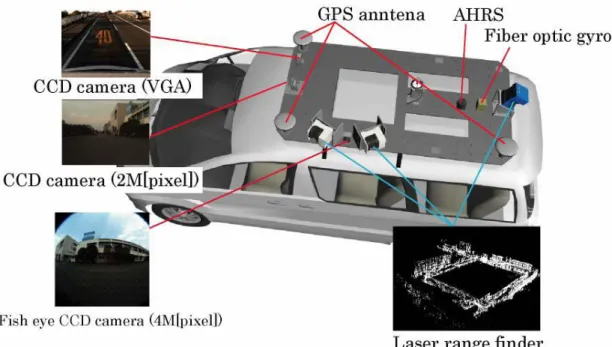
Özellikle lazer tarayıcıların ve birçok algılayıcının Ishikawa ve ark. 2006 örneğinde olduğu gibi bir araya geldiği MHYS sistemleri bu alandaki ulaĢılmıĢ teknolojinin en son ve yaygın ticari örneklerindendir. (ġekil 2.6.).
Büyük firmalar yukarda bahsedilen özellikle lazer entegreli çoklu algılayıcı sistemleri üretip satma ve hizmet verme yönünde bir eğilim göstermektedirler. Ancak bu sistemlerin kadastral amaçlı kullanımlara imkân sağlayacak doğrulukta olanları yüksek maliyetli algılayıcılardan oluĢmakta bu da sistemlerin fiyatını oldukça arttırmaktadır. Bu sistemlerin maliyeti genelde 100 000 €‟yu bulmaktadır. Bu nedenle bu sitemler daha çok özel kullanıcılar için bir çözüm olmaktadır. Yaygın kullanımlar için araĢtırmacılar düĢük maliyetli (30 000 € altında) sistemler tasarlamaktadırlar (Bendea ve ark. 2009).
DüĢük maliyetli sistemler için düĢük maliyetli ve düĢük hassasiyetli algılayıcılar kullanılmakta ve bunlar genelde fazla hassasiyet gerektirmeyen CBS uygulamalarında kullanılmaktadır (Madeira ve ark. 2008, Gontran ve ark. 2003, Jaakkola ve ark 2010). Fazla hassasiyet gerektiren kadastral vb. uygulamalarda ise özel yazılımlarla veya farklı tekniklerin beraber kullanılması ile hassasiyet arttırılmaktadır. Chiang ve ark 2009 yılında düĢük maliyetli GPS, INS, IMU ve Micro Electro Mechanical Systems (MEMS), entegre bir sistem tasarlayıp kalman filtreleme algoritması ve yapay sinir ağları ile hassasiyetini arttırmıĢlardır.
Alshawa ve ark. 2009 yılında Yersel Lazer Tarayıcı, Kamera ve MEMS GPS‟den oluĢan basit bir sistem tasarlayıp fotogrametrik çözüm ile yaklaĢık konum bilgisini elde etmiĢler. Sonrasında ise Lazer noktalarını kontrol noktası olarak kullanılarak hassas konum bilgisini elde etmiĢlerdir (ġekil 2.7).
ġekil 2.7. Lazer tarayıcı noktalarının fotogrametrik değerlendirme ile beraber kullanıldığı sistem (Alshawa ve ark. 2009)
DüĢük maliyetli ve ya yüksek maliyetli bütün sistemlerin temel hedefi doğrudan konum belirlemektir. Fotogrametrik olarak bunun mümkün olabilmesi içinde iç ve dıĢ yöneltme elamanlarının bilinmesi gerekmektedir. Mobil sistemlerin çoğunda dıĢ yöneltme elemanlarından dönüklükler analog veya dijital ataletsel araçlarla ölçülmektedir. Öyle ki mobil olmayan sistemlerde bile doğrudan konumlandırma için kullanılmaktadır (Kirchhöfer ve ark.) (ġekil 2.8).
ġekil 2.8. Tarihi kayıt için düĢük maliyetli doğrudan yöneltme yapılan fotogrametrik kayıt sistemi
Mobil sistemlerde ataletsel araçların kullanılmadığı bir entegrasyon genelde pek görülmese de Roncella ve ark. 2005 yılında yaptıkları çalıĢmada fotogrametrik olarak sinyal kesilmesi ve otomatik eĢleme iĢlemlerini yazılım ile çözmeye çalıĢmıĢlardır. Ġki kamera ve iki GPS anteni ile yapılan sistemde ġekil 2.9. görüldüğü üzere Y ekseni etrafında dönüklük olmadığı kabul edilerek çözüm üretilmeye çalıĢılsa da ancak istenen sonuca ulaĢılamamıĢtır.
ġekil 2.9. Roncella ve ark. ‟nın (2005) ataletsel araçlar kullanmadan oluĢturduğu alım sitemi
Wong (2006) yaptığı master tez çalıĢmasında bizim tez önerimizdeki çalıĢmaya benzer bir çalıĢma yapmıĢtır. Bir araç üzerine yerleĢtirdiği 2 GPS alıcısı ve 2 kameradan oluĢan bir sistemle mobil harita yapım sistemi oluĢturmuĢtur. ġekil 10. Araç alımı yapılacak konuma geldiğinde duruyor 1-2 dk. bekledikten sonra diğer konuma hareket ediyor. Veriler Photomodeler yardımıyla değerlendirilerek elde edilen 3 Boyutlu koordinatlar GPS verilerinde de yararlanılarak Matlab yazılımında oluĢturulan bir arayüz ile değiĢik çalıĢmalarda altlık olarak kullanılmak veya altlık haritaların güncellenmesi için 2 boyutlu konum bilgisine dönüĢtürülmüĢtür.
Tablo 2.2. Dünyadaki bazı mobil harita yapım sistemleri ve özellikleri (Tao 2000, Wong 2006, Ellum 2001)
Sistem GeliĢtirici /
AraĢtırmacı
Konum Belirleme
Algılayıcıları Harita Yapım Algılayıcıları
ARAN Roadware Corp., ON, Canada Accelerometers/IMU/ GPS 1 VHS, 2 or more CCD, Laser CDSS Geodetic Institute Aachen GPS, 2 odometers barometer 2 monochrome CCD
DGI Data Chromatics, Inc.,
USA GPS 1 CCD
Gator Communi
cator
University of Florida GPS, digital compass
inclinometer 2 CCD digital cameras GeoVAN GeoSpan Corp., CO,
USA GPS/DR 8 CCD, voice recorder
GI-Eye NAVSYS Corp., CO,
USA GPS/IMU 1 CCD
GIM NAVSYS Corp.
GPSVan
The Ohio State University, Columbus,
OH, USA
GPS/Gyro/wheel
counter 2 CCD, voice recorder
GPSVisio n
Lambda Tech Int‟l Inc.,
WI, USA GPS, INS 2 color CCD
Indoor MMS
National Research Council, Canada
Wheel encoders 8 CCD, biiris laser
Kiss Univ. of Bundeswger Munich and GeoDigital, Germany GPS/IMU/Odomete r/Barometer 1VHS,2CCD, Voice Recorder
MoSES University of the Federal Armed Forces Munich
GPS, navigation-grade IMU, odometer, barometer, inclinometer
2 CCD (possible laser scanner and colour video camera) Laser
scanner MMS
Wuhan Technical University
GPS CCD digital camera, laser scanner
ON-SIGHT
TransMap Corp., OH,
USA GPS, INS 4 color CCD
RGIAS Rowe Surveying and
Engg.Inc.USA GPS Video/Laser Roadview Mandli Communications, Inc, WI, USA GPS/IMU/ Inclination
Odometer/ Barometer Progressive Scan CCD Road
Radar
Road Radar Ltd.,
Canada GPS
Ground Penetrating Radar, 1 Video
TruckMA P
John E. Chance and Associate, Inc., LA,
USA
Multi-antenna
GPS/gyro Laser range finder, 1 Video
VISAT University of Calgary GPS/IMU 8 monochrome CCD, 1 colour VHS WUMM S Wuhan Technical Univ. of Surveying and Mapping,China
GPS 3 color CCD, Laser Range Finder
MHYS ardıĢık görüntülerden hızlı konumsal veri elde etmeyi hedefler. Bu sebeple birçok ardıĢık görüntü toplanmaktadır. Bu görüntülerden faydalı doğru bilgi elde etmek önemli kritik konulardandır. Bunun için Tao 2000 yılında ardıĢık resimlerden görüntü iĢleme yardımıyla yarı otomatik obje iĢaretleme yaklaĢımında bulunmuĢtur.
ÇalıĢmada çözüme katkı sağlayacağı düĢünülen bir diğer konu da Yapay Sinir Ağları (YSA) olmuĢtur. Bilindiği gibi birçok önemli buluĢların temelinde doğanın taklit edilmesi gerçeği yatmaktadır ve bu yüzden insanlar sürekli doğayı taklit etmeye çalıĢmıĢtır (Özbay, 1999). Bu taklit etme çabalarının yeni ürünlerinden biriside de YSA‟dır. Normal hesaplama tekniklerinden farklı bir yaklaĢım ortaya koyan YSA konum bilgisi üretme çalıĢmalarında da kullanılmaya baĢlanmıĢtır.
Çorumluoğlu ve ark 2005 yılında yaptıkları çalıĢmada, GPS teknikleri kullanılarak üretilen GPS elipsoidine ait WGS84 elipsoit yüksekliklerinden faydalanarak ve YSA aracılığıyla oluĢturulan fonksiyonel modeller yardımıyla yükseklikle ilgili yönetmelik hükümlerinde belirtilen doğruluk sınırlarının içinde kaldığı ve yüksek doğrulukla çalıĢılan alan içerisinde ortometrik yüksekliklerin üretiminin mümkün olacağı gösterilmiĢtir.
Hasaltın ve BeĢdok, 2004 yılında yaptıkları bir çalıĢmada görüntü iĢleme problemlerinde yaygın olarak kullanılan ve klasik bir yaklaĢım olan iki boyutlu ayrık fourier dönüĢümü (FFT) ile yapay zekâ tekniklerinden biri olan yapay sinir ağları kullanılarak gerçekleĢtirilen dönüĢümlerin performansları karĢılaĢtırılmıĢtır. FFT kullanılarak gerçekleĢtirilen dönüĢüm sonuçları ile YSA kullanılan görüntüler karĢılaĢtırıldığında performans bakımından fark görülmediğini ayrıca YSA‟nın iĢ hacmi ve zaman açısından avantaj sağlayabileceğini vurgulamıĢlardır.
Bu çalıĢma ile aynı eksendeki MHYS daha öncede belirtildiği üzere farklı algılayıcıların entegrasyonunu içermektedir. Chiang ve El-Sheimy, 2004 yılında yaptıkları çalıĢmada GPS-INS entegrasyonu konusunda günümüzde yaygın olarak kullanılan Ġteratif Kalman Filtreleme yönteminin yerine Yapay Sinir Ağları yönteminin kullanılması yönünde araĢtırma yapmıĢlardır. Sayısal fotogrametri uygulamalarında karĢılaĢılan ve özellikle kenar belirleme, görüntü segmentasyonu ve detay çıkarımı konularında karĢılaĢılan sorunların giderilmesi amacıyla yapılan çalıĢmalarda, Yapay Sinir Ağları tekniğinin Ġteratif Kalman Filtreleme yöntemine göre daha iyi sonuçlar verdiği tespit edilmiĢtir.
3. MATERYAL VE METOT
3.1. Mobil Harita Yapım Sistemleri
Mobil harita yapım teknolojileri hakkında Tao ve Li tarafından 2007 yılında yayınlanan “Advances in Mobile Mapping Technology” isimli kitapta ve yine Tao`nun 2000 yılında yaptığı inceleme makalesinde kapsamlı bir özet ortaya konulmuĢtur.
Harita yapım biliminin dijital harita yapım alanında sürekli olarak ilerlediği bilinen bir gerçektir. Son on, on beĢ yıllık süreçte özellikle dijital teknolojilerin etkisiyle Fotogrametri, Uzaktan Algılama, Coğrafi Bilgi Sistemleri (CBS) ve uzaysal konum belirleme teknolojilerinin entegrasyonu mümkün olmuĢ ve bu da harita yapım sektörünün hızla geliĢmesi ve muazzam bir Ģekilde büyümesiyle sonuçlanmıĢtır. Modern dijital harita yapım teknolojisi birçok disiplinin birleĢimi, çoklu platform düzeltmeleri, çoklu algılayıcı entegrasyonu, çoklu veri bütünleĢmesi ile karakterize olmuĢtur.
Çoklu platform ve çoklu algılayıcı entegreli harita yapım teknolojisi hızlı konumsal veri toplama yönünde açık bir eğilim ortaya koymuĢtur. Algılayıcılar; uydular, uçaklar, helikopterler, kara araçları, deniz veya su araçları, hatta arazi personeli tarafından elde taĢınabilen araçlar gibi farklı platformlar üzerine monte edilebilmektedir. Ġnternet ve kablosuz iletiĢim ağlarının kullanımın artması ve algılayıcı ağlardaki son geliĢmeler verimli bir Ģekilde veri transferi ve veri iĢlemesi için önemli olanaklar sağlamıĢtır. Bunun sonucu olarak ta harita yapımı mobil ve dinamik bir hal almıĢtır.
Mobil harita yapımı; bir konumsal veri toplama aracı olarak kullanılan platform üzerine monte edilen harita yapım algılayıcıları ile tanımlanır. Mobil harita yapımı üzerine alıĢtırmalar 1980‟lerin sonlarına kadar uzanır. Ġlk çalıĢmalar kara yolu alt yapı haritalarının hızlı olarak üretilmesi ve ulaĢım hatlarının envanterine duyulan ihtiyaç nedeniyle sürdürüldü. Bu süreçte, kameralar, yön bulma ve konum belirleme algılayıcıları (örneğin Küresel Konum Belirme-Global Positioning System: GPS) ve ataletsel ölçme birimi (Inertial Measurement Unit: IMU) gibi araçlar birbirine entegre ve harita yapım amacı doğrultusunda bir mobil araç üzerine monte edildi. Objelerin yön bulma ve konum belirleme algılayıcıları kullanılarak konumlandırılan resimlerden ölçümü ve haritalarının yapımı gerçekleĢtirilebildi. Ġlk zamanlarda, araĢtırmacılar tarafından bu heyecan verici araĢtırma alanını tanımlamak için değiĢik terimler kullandı.
Kinematik ölçme, dinamik harita yapımı, araç bazlı harita yapımı vs. gibi terimler bilimsel literatürde yer aldı. 1997 de Mobil Harita Yapım Teknolojisi (Mobile Mapping Technology) üzerine ilk uluslar arası sempozyum ABD‟nin Ohio eyaletinin Columbus Ģehrindeki The Ohio State Üniversitesinin Harita Yapımı Merkezinde yapıldı. Daha sonra “Mobile Mapping-Mobil Harita Yapımı” terimi kabul gördü ve çoğunlukla bu terim kullanıldı.
ġekil 3.1. Harita Yapım Uygulamaları için çoklu algılayıcı entegrasyonu (URL -3)
Mobil harita yapımının inkiĢaf ve geliĢmesi öncelikle dijital görüntüleme ve doğrudan konumlandırma teknolojilerindeki geliĢmeler sayesinde mümkün olmuĢtur. 1990‟ların sonuna kadar yürütülen çalıĢmalar daha çok ticari amaçlı karasal bazlı mobile harita yapım sistemleri üzerine yoğunlaĢmıĢtır. Bu mobil harita yapım sistemlerinin geleneksel karayolu ölçmeleri ve harita yapımı üzerinde büyük bir etkiye
sahip olacağı yönünde yüksek bir beklenti oluĢturdu. Ancak piyasa kabulü beklenen düzeye aĢağıdaki nedenlerle ulaĢamamıĢtır:
(1) UlaĢım ölçmeleri için teknoloji dağılımında bir iĢ akıĢı konusu vardı. Mobil harita yapım sistemleri aracılığıyla üretilen orijinal projeyi son hale getirmek amacıyla eksik objelerin alımı için arazi ekibinin sık sık yeniden arazi ölçümü yapması gerekiyordu. Bu yüzden böyle sistemlerin verimliliği garanti edilemiyordu.
(2) Sistemin oluĢturulmasının ve yaygın hale gelmesinin yüksek maliyeti, rutin yol güzergâh araĢtırmaları için böyle sistemlerin kullanımını ilk zamanlar sınırlı kılmıĢtır.
Sınırlandırmalara rağmen ulaĢım, telekomünikasyon, acil müdahale ve yol kenar bilgisi değerlendirilmesine yönelik mühendislik uygulamaları vb. amaçlı çalıĢmalarda karasal mobil harita yapımına karĢı artan bir talep görüldü. Birçok özel sistem ve hizmet modeli çeĢitli uygulamalar için geliĢtirildi. Bazı Ģirketler müĢteri çekmek için yol görüntüleme servisleri veya tıklama baĢına ödeme Ģeklinde ücretlendirme modeli geliĢtirdiler. Bu model sayesinde müĢteri bir sistem veya yazılım paketine sahip olmak yerine, yol görüntü verisini satın alabilmekte ve sadece resimlerden toplanan veya ölçülen obje sayısı için ödeme yapabilmektedir.
3.1.1. Mobil Harita Yapım Sistemlerinin GeliĢimi
Genel olarak mobil harita yapım teknolojisinin geliĢimi aĢağıdaki üç aĢamaya ayrılabilir.
3.1.1.1. Foto-Kayıt (Photo-Logging)
1970‟li yıllarda foto-kayıt sistemleri birçok karayolu taĢımacılığı departmanı tarafından üst yapı performansını izleme, iĢaretleme, bakım iĢleri, tecavüzler vb. alanlarda kullanıldı. Bu tür hizmetlere genellikle 2 veya 3 yıllık aralıklarla gereksinim duyulmaktadır. Bu amaçlarla araçlara monte edilen çoğu film kameraları minibüs tipi araçların ön camları yönünde araca takılarak fotoğraf çekimi için kullanıldılar. Kameralara ek olarak ayrıca, bir atalet cihazı (jiroskop ve ivmeölçer vb.) ve bir tekerlek hareket sayacı (km sayacı gibi) da çekilen fotoğrafların anlık konumlarını belirlemek maksadıyla kullanıldılar. Bu sayede, her bir fotoğraf, çekim zamanı ve coğrafi konum
bilgisi ile beraber tespit edilmiĢ oldu. Bu fotoğraflar otoyol performansının baĢlıca resimsel kaydı olarak depolandı (Birge, 1985).
ġekil 3.2. Eski bir foto-kayıt sistemi (Breyer, ve Lalan, 2006)
Bu sistemlerde araç konumunun kaba doğruluğu ve sadece bir kamera konfigürasyonu kullanması nedeniyle 3B obje ölçümü fonksiyonel olarak kullanılabilir değildi. Foto-kayıt‟ın en büyük dezavantajı depolama ve iĢlemenin film tabanlı olmasıdır. Filmlerin kırılgan ve film iĢlemenin maliyetli olmasından dolayı mühendislik, planlama, yasal veya güvenlik faaliyetleri için eriĢimi zaman almaktaydı.
3.1.1.2. Video-Kayıt (Video-Logging)
GPS ve dijital video görüntüleme teknolojilerinin ortaya çıkması ile kullanıĢsız foto-kayıt sistemlerinin yerini GPS bazlı kayıt sistemleri aldı. GPS tabanlı video-kayıt sistemlerinin otoyol envanteri için hızlı ve düĢük maliyet yaklaĢımı sunduğu birçok proje ile ispatlanmıĢtır. Toplanan video görüntüleri sürekli olarak GPS yön bulma ve konum bulma bilgileri kullanılarak küresel koordinat sistemine göre konumlandırılmaktadır. Film iĢleme içermediğinden veri iĢleme için geçen zaman önemli ölçüde düĢmüĢtür. Ayrıca dijital ve konumlandırılmıĢ video verileri hızlı eriĢime ve etkin bir yöneltmeye imkân verir. Otoyol video verilerinin yorumlanabilme yeteneği görüntü iĢleme yazılımı kullanarak da güçlendirilmiĢtir. Bu yöntem çoğu ulaĢım departmanı tarafından kabul görmüĢtür. Görsel envanter ve yol güzergâhı boyunca özellik dokümantasyonu bu tür sistemlerin ana amacı olarak ifade edilebilir (Tao ve Li, 2007).
ġekil 3.4. ġekil 3.3.‟deki Video-Kayıt sisteminin kamera görüntüleri
3.1.1.3. Mobil Harita Yapımı (Mobile Mapping)
Karasal mobile harita yapım sistemlerinin geliĢmesi Kuzey Amerika‟daki iki araĢtırma gurubu tarafından baĢlatıldı. Bunlar ABD‟deki The Ohio State Üniversitesinin Harita Yapım Merkezi ve Kanada‟daki Calgary Üniversitesi Geomatik Mühendisliğidir. Video kayıt sistemleri diğerlerinin aksine mobil harita yapım sistemleri olarak geliĢtirilmiĢ entegre çoklu algılayıcılı veri toplama ve iĢleme teknolojisi kullanılarak gerçekleĢtirilen tamamen 3B harita yapım olanakları sunmaktadır.
Mobil Harita Yapım Sistemlerinin yaygın bir özelliği, stereo görüntüleme ve 3B ölçüm sağlamak için mobil bir platform üzerine birden fazla kamera monte edilmesidir. ArdıĢık dijital görüntülerin doğrudan konumlandırması yön bulma ve konumlandırma teknikleri kullanılarak gerçekleĢtirilir. Çoklu konum algılayıcılarında GPS, IMU ve pusula veri iĢlemede konumlandırmanın doğruluğunu ve kuvvetini arttırmak için birlikte kullanılmıĢlardır. Klasik harita yapımındaki yer kontrol noktası gereksinimi bu Ģekilde ortadan kaldırılabilir. Sistemler araç konumunu cm doğruluğa ve konumlandırılmıĢ ardıĢık görüntülerden ölçülen objelerin 3B koordinat doğruluğunu da metre veya metre altı doğruluğa ulaĢtırabilir.
Bunun paralelinde ise geniĢ format dijital kameralar, lazer tarayıcılar (LIDAR) ve Ġnterferometrik Yapay Açıklıklı Radar (IfSAR veya InSAR) harita yapım sistemleri gibi hava algılayıcılarında etkileyici geliĢme yaĢandı. Son 10 yıldır uydu algılayıcıları
özellikle yüksek çözünürlüklü ticari görüntüleme uyduları (örn., IKONOS, QuickBird, OrbView-3) harita yapımında önemli rol oynamıĢtır. Birde algılayıcı yönünden ucuz ve küçük algılayıcıların hem profesyonel ve hem de genel kullanıcılar için artan kullanımı ve kablosuz, mobil ve gezici ağ eriĢimi mobil harita yapımını geniĢ bir kullanıma ulaĢtırmıĢ ve yaygın hale getirmiĢtir.
Mobil harita yapımındaki yeni teknolojik eğilim aşağıdaki şekilde ifade edilebilir;
1-Düşük maliyetli doğrudan konumlandırma cihazları ile mobil ve taşınabilir algılayıcıların artan kullanımı
2-Bir biri ile ilişkili çoklu platform algılayıcıları ile ortak harita yapımı
Telekomünikasyon bant geniĢliği ve bilgisayar gücündeki geliĢmiĢ kapasitenin verdiği iliĢkili veri toplama artık teknik bir hipotezdir. Harita yapımı ya tek bir algılayıcı ağı ile ya da birçok algılayıcı ağının oluĢturduğu bir ağ ile gerçekleĢtirilebilir. Son zamanlarda bu alanda büyüyen ve heyecan verici geliĢmeler görülmektedir. Örneğin; sabit yer algılayıcıları ağı, karasal mobil harita yapım sistemi, hava sistemleri ve hatta uydu sistemleri günümüzde tamamen çok düzeyli haritalama ve izleme için entegre edilebilmektedir. Gerçek zamanlı iletiĢim bağlantıları sayesinde iliĢkili toplanan veri kablosuz ağlar ve internet üzerinden dağıtılabilir ve eriĢilebilir. Sonuç olarak verinin toplanması, iĢlenmesi, transferi ve yönetimi sorunsuz Ģekilde entegre bir iĢ akıĢı ile kontrol edilir. Bu durum gerçekten akıllı bir algılama için heyecan verici bir çerçeve sunmaktadır.
Uygulama yönü ile harita yapımının genel kullanıcılar arasında popülarite kazandığını görmek çok daha heyecan vericidir. Hava ve uydu görüntülerini geniĢ ölçüde kendi online harita servislerinde kullanan Google, Microsoft ve Yahoo vb. internet devleri sayesinde kitlesel kullanıcılar günümüzde coğrafi verilerin değerinin farkında ve daha fazla önem vermekte. Bu servisler hızlı ve düĢük maliyetli görsel veriye ulaĢmak için bu sistemleri kullanmaya baĢlamıĢlardır (Tao, 2003).
Çoklu platform ve çoklu algılayıcı entegreli teknolojiler hızlı mekânsal veri elde etme eğilimi nedeniyle oluĢturulmuĢtur. Çoklu algılayıcılı sistemler, uydular, uçaklar veya helikopterler, kara araçları, deniz veya su araçları, hatta arazi personeli tarafından elde taĢınabilen araçlar gibi farklı platformlar üzerine monte edilebilir. Bunun sonucu olarak her araç veya arazi personeli küresel entegre veri elde etmeden sorumlu potansiyel bir veri toplayıcı olarak ortaya çıkar. Karasal Mobil Harita Yapım
Sistemlerinin (Mobile Mapping Systems: MMS) vardığı son geliĢme bu entegre teknolojinin tipik bir uygulamasını ortaya koymaktadır.
3.1.2. Çoklu Algılayıcı Entegre EdilmiĢ Mobil Harita Yapım Sistemleri
Bir Mobil Harita Yapım Sistemi üç bileĢen içerir. Bunlar; veri toplama, bilgi çıkarma ve bilgi yönetimi. Bunlardan en önemli olanı veri toplama bileĢenidir.
3.1.2.1. Veri toplama
Doğrudan Konumlandırma
Mobil Yapımının en önemli konsepti doğrudan konumlandırmadır. Doğrudan konumlandırmanın kavramsal Ģeması Ģekil 3.5. da gözükmektedir. Doğrudan konumlandırma yer kontrol noktası olmadan harita yapım algılayıcısının dıĢ yöneltmesinin belirlenmesi ve fotogrametrik blok triyangülasyonu ile ilgilidir. Örneğin bir kamera algılayıcısı kullanılması durumunda çekilen her görüntü konumlandırma parametreleri yani üç konum parametresi ve 3 durum parametresi ile tespit edilebilir. Sonuç olarak 3B obje ölçümü fotogrametrik önden kestirme kullanılarak doğrudan yapılabilir.
Doğrudan konumlandırma için üç model vardır. Bunlar; bağımsız mod, entegre mod ve birleĢik mod dur.
Bağımsız Mod: GPS uydu sinyal kesintisinin meydana gelmesi kaçınılmaz oluĢundan dolayı profesyonel bilgi sağlamak için GPS‟in tek baĢına kullanılması güvenilir değildir. Loran C, CDMA tabanlı sistemler gibi mevcut hücresel konum belirleme sistemleri benzeri radyo navigasyon sistemlerinden bazılarının kullanımı mümkün olsa da çoğu, mobil harita yapımı için yeterli doğruluk vermez. Konumlandırma için bağımsız mod mobil harita yapımı için kalıcı bir çözüm değildir. Ancak yüksek doğruluk gerektirmeyen yerlerde video-kayıt uygulamaları için çoğunlukla kullanılmaktadır.
Entegre Mod: Entegre harici atalet konumlandırma sistemlerinin kullanımı günümüzde konumlandırma için alıĢılmıĢ yaygın bir yaklaĢımdır (Schwarz ve Wei, 1994; Lithopoulos ve ark, 1996; Skaloud ve ark, 1996; Grejner-Brzezinska ve ark., 1999). Uygulamaya bağlı olarak farkı seviyede entegrasyon ve farklı yollarla algılayıcı kombinasyonu geliĢtirilebilir. Örneğin GPS ile INS, GPS ile IMU vb.
BirleĢik Mod: Hava fotogrametrisinde doğrudan konumlandırma için birleĢik mod yüksek performans, güvenilirlik ve ekonomik faktörlerden dolayı pratikte çoğunlukla kullanılır. Bu mod ta GPS ve Fotogrametrik gözlemlerin her ikisi de triyangülasyon blok dengelemesi içerisinde birleĢtirilir. Böylece sistematik GPS hataları toplu dengeleme ile kontrol edilebilir ve düzeltilebilir (Ackermann, 1996). Çok az kontrol noktası bu birleĢik modta datum problemini çözmek için gereklidir. Mobil harita yapım sistemlerinde resim bağlama noktaları, akıllı Ģerit fotogrametrik triyangülasyonunu oluĢturmak için kullanılan bindirmeli resim dizilerinden elde edilebilir. Böylece kameranın yöneltme parametreleri de elde edilebilir. Bu teknik GPS/INS gözlemleri ile konumlandırılan verinin kalite kontrolü için kullanılabilir. Bunun yanında GPS sinyallerinin sürekliliğinin engellendiği köprü vs. geçiĢlerinde yöneltme gözlemlerinde oluĢan veri kayıplarında kullanılabilir (Chaplin ve Chapman, 1998; Tao ve ark., 1999).
Doğrudan konumlandırma veri iĢleme zamanı açısından hızlı geri dönüĢüm ve yer kontrol ölçmelerinin maliyetini düĢürme gibi harita yapım prosedürleri konusunda önemli faydalar getirir. Doğrudan konumlandırma tekniği mobil harita yapımına uygulanabilir. Hatta Havai LIDAR ve Havai SAR harita yapım sistemleri gibi yeni nesil havai mobil harita yapım sistemlerinin geliĢmesine neden olmuĢtur. Bu sistemlerin nihai
hedefi herhangi bir yer kontrol noktasına bağlı olmadan tamamen otomatik harita yapım sisteminin oluşturulmasıdır ( Tao, 2000).
3.1.2.2. Konum Belirleme ve Harita Yapım Algılayıcıları
Mobil harita yapım sistemlerinin geliĢiminde çoklu algılayıcıların yanı sıra entegre algılayıcı iĢleme metotlarının kullanımı da önemli bir rol oynamıĢtır. Genel olarak sistemlerde baĢlıca iki algılayıcı tipi vardır. Bunlar; konum belirleme ve harita yapım algılarcılarıdır.
Konum belirleme algılayıcıları:
a) Çevre-bağımlı harici konumlandırma algılayıcıları: GPS, Radyo navigasyon sistemleri, Loran-C, hücresel konum belirleme araçları vb. b) Bağımsız atalet konum belirleme algılayıcıları: INS veya IMU, kaba
pusula sistemleri, jiroskop, ivmeölçer, kumpaslar, kilometre sayaçları, barometreler vb.
Harita Yapım Algılayıcıları;
a) Pasif görüntüleme algılayıcıları: video veya dijital kameralar, multi-spektrum veya hiper-multi-spektrum tarayıcılar
b) Aktif görüntüleme algılayıcıları: Lazer mesafe ölçerler veya tarayıcılar, sentetik açıklıklı radar (SAR) vb.
Ses kaydedici ve konuĢma tanıyan araçlar, dokunmatik ekranlar, ısı veya hava basınçölçerler, gravite ölçerler vb. gibi diğer algılayıcılar da entegrasyon için kullanılabilir (Tao 2000).
ġekil 3.6. Harita yapım amaçlı entegre çoklu algılama sistemi (Özçelik, ve BeĢdok, 2009)
Konum belirleme algılayıcıları araç yöneltmek içindir. Onlar mobil harita yapım platformunun mutlak konumunu WGS-84 gibi küresel bir koordinat sistemine göre belirlemek için kullanılır. Harita yapım algılayıcıları ise detay alımı içindir. Bunlar lokal koordinat sistemindeki araca göre objelerin (detayların) konumsal bilgisini sağlar. Buna ilaveten harita yapım algılayıcılarından detaylara ait öznitelikler de elde edilebilir. Konum belirleme ve harita yapım algılayıcılarının geometrik olarak birlikte çalıĢması için hassas kalibrasyona ihtiyaç duyulur. Algılayıcıların hassas senkronizasyonu da (zamansal) yapılmalıdır.
3.1.3. Bazı Özel Mobil Harita Yapım Uygulama Alanları
Mobil harita yapımının bilindik haritacılık uygulamalarının yanında Alhadad 2005 de bahsedilen bazı özel uygulamaları da Ģunlardır;
Karayollarındaki Uygulamaları: Mobile harita yapım teknolojilerinin uzun soluklu kullanıldığı alanlardan biridir. Trafik iĢaretlerinin envanteri, hız sınırı ve park yasağı ihlallerini görüntüleme, yol ağı veritabanı oluĢturma, lazer teknolojisi ile birlikte kullanıldığında yol yüzey koĢullarının kontrolü vb. alanlar mobil harita yapım sistemlerinin karayollarındaki kullanımlarından bazılarıdır.
Enerji Nakil Hatlarındaki Uygulamaları: Enerji nakil hatlarındaki kule direk vb. yapıların en üst ve en alt noktalarının ölçülmesi, düĢük hatların belirlenmesi, envanter ve keĢif çalıĢmaları vb. kullanılabilir.
Hassas Tarımdaki Uygulamaları: Hassas Tarımda mobile harita yapım teknolojileri CBS ile birlikte özellikle değiĢim izlemesi (nerede, ne zaman, nasıl) yapılarak etkili bir tarım planlamasına imkân tanır. Sadece değiĢim izleme ile değil bunun yanında toprak Ģartları ve kalite tespitleri vb. baĢka uygulamalar ile bu etkili planlamaya katkıda bulunabilir.
Acil Arama ve Kurtarma Servisleri Ġçin Altyapı Haritaları Yapım Uygulamaları: 911, 112 vb acil arama kurtarma servisleri için binaların, önemli noktaları, telefon kulübesi, vb. yerlerin konum ve özellikleri toplanarak bir veritabanı oluĢturulabilir.
3.1.4. Anlık Mobil Harita Yapımı
Mobil harita yapımının amacı ölçme iĢlemi devam ederken mekana ait konum ve öznitelik bilgisini dijital ve dinamik olarak elde etmektir. CBS veritabanı için veri iĢleme ve üretimi ölçme sonrası büroda değerlendirme Ģeklinde yapılabilir. Diğer taraftan harita veya CBS veri tabanı gibi ürünlerde ölçme sırasında anlık harita bilgisi elde edilmesi gerekebilir. Birçok uygulamada büroda ölçme sonrası değerlendirme bazı problemlere yol açmaktadır. Örnek olarak; bir güzergah boyunca ölçme iĢlemi yapılması düĢünüldüğünde güzergah takibi için önemlidir (Alhadad, 2005). Biraz daha somut bir örnek vermek gerekirse askeri koĢullarda ve acil arama kurtarma hizmetlerinde ve anlık konum bilgisi gerekli birçok uygulamada anlık mobil harita yapımı kaçınılmaz olabilmektedir.
3.2. Görüntü EĢleme
Günümüzde, haritacılık, bilgisayar bilimleri, elektronik vb. pek çok alanda geliĢen görüntüleme teknolojilerinin sağladığı görüntülerden artan bir eğilimle yararlanılmaktadır. Özellikle görüntülerden yararlanmanın en yaygın yolu onlardan bilgi elde etmek ve bu bilgileri yorumlamaktır. Bilgi elde etme ve yorumlama iĢi ise hız çağının bir gereği olarak otomatik olarak yapılması her zaman kullanıcıların nihai hedefi olmuĢtur. Ayrıca görüntüleme teknolojilerinin sağladığı bazı görüntüleri doğrudan yorumlamak ve kullanmak mümkün olmamaktadır. Görüntüden bilgi elde etmek ve yorumlamak için yapılan tüm bu iĢlemler Görüntü İşleme olarak adlandırabilir,
3.2.1. Görüntü ĠĢleme
Dijital bir resim haline getirilmiĢ olan gerçek yaĢamdaki görüntülerin, bir girdi resim olarak iĢlenerek, o resmin özelliklerinin ve görüntüsünün değiĢtirilmesi veya iyileĢtirilmesi sonucunda yeni bir resmin oluĢturulmasıdır (ġekil 3.7.) (Yıldırım, 2003).
ġekil 3.7. Görüntü iĢlemenin iĢ akıĢı (Yıldırım, 2003)
Sayısal görüntü iĢleme denildiğinde, görüntüler üzerinde görüntünün kalitesini artıran, görüntü zenginleĢtirme, histogram analizi, kontrastlık iĢlemlerinin yapılması gibi sayısal iĢleme adımları olan görüntü iĢleme tekniklerinin uygulanması akla gelir (Öztürk ve Koçak, 2007) .
3.2.1.1. Epipolar Geometri
Fotogrametrik görüntüler merkezi izdüĢüm ve perspektif projeksiyon yöntemleri kullanılarak elde edilen görüntülerdir. Merkezi perspektif projeksiyon, epipolar geometri olarak adlandırılan çok önemli geometrik bir özellik sağlar (ġekil 3.8.). Ġki görüntü dikkate alınırsa, üç boyutlu uzayda epipolar düzlem, konu obje noktasını ve her iki görüntünün projeksiyon merkezini içeren düzlem olarak tanımlanır. Bu düzlem, her iki görüntüyü epipolar doğru olarak adlandırılan doğrularla keser. Eğer iki görüntünün de karĢılıklı yöneltmesi biliniyorsa, bir görüntüde verilen bir nokta için diğer görüntüde epipolar doğru hesaplanabilir ve bu noktaya karĢılık gelen nokta mutlaka epipolar doğru üzerinde bulunur.
Böylece görüntü eĢleme problemi, iki boyutlu iĢlemden bir boyutlu bir iĢleme dönüĢür. Epipolar doğrular boyunca eĢlemeyi kullanabilmek için, her iki görüntü bütün stereo modelde düĢey veya y-paralaksı giderilerek normal duruma dönüĢtürülmelidir.
Sonuç olarak, eĢlemenin sadece baz doğrusu yönünde yapılması gerekir. Epipolar sınırlamayı kullanabilmek için bir ön iĢlem gerekli değildir. Bir görüntüde verilen bir nokta için, diğer görüntüdeki epipolar doğru karĢılıklı yöneltme parametreleri kullanılarak hesaplanabilir ve eĢleme bu epipolar doğrular boyunca sürdürülür (Öztürk ve Koçak, 2007).
ġekil 3.8. Epipolar sınırlama, epipolar düzlem (P,P‟,P‟‟) ve epipolar doğrular e‟. ve e‟‟. (Heipke, 2005)
Epipolar sınırlama, belirsizlik problemlerinin çözümü ve hesaplama süresini azaltmak için çok önemlidir. KarĢılıklı yöneltme parametrelerinin yaklaĢık değerleri bilinse bile, eĢlenik noktalar için baza dik doğrultuda araĢtırma alanını azaltmak
amacıyla epipolar sınırlama kullanılmalıdır (ġekil 3.9.). Yalnız epipolar sınırlamanın sadece görüntü çiftleri için hesaplanabildiği göz önünde bulundurulmalıdır (Öztürk ve Koçak, 2007).
ġekil 3.9. Epipolar eĢleme (Öztürk ve Koçak, 2007).
3.2.2. Görüntü EĢleme Tanımı ve Dijital Fotogrametrik Kullanımı
EĢ, kelime anlamı olarak; bir diğerine benzer ya da aynı olandır. EĢleme; eĢitini ya da benzerini bulmak veya yapmak anlamında kullanılır. Aynı Ģekilde eĢleme problemi de, iliĢki kurma olarak ifade edilir. Veri setleri; görüntüleri, haritaları, obje modellerini ve CBS (Coğrafi Bilgi Sistemi) verilerini temsil eder. Digital görüntü eĢleme, en azından kısmen aynı manzarayı içeren iki veya daha fazla sayısal görüntüden elde edilen temel elemanlar arasındaki iliĢkinin otomatik olarak kurulmasıdır(ġekil 3.11.). Temel elemanlar, görüntülerden çıkarılan detaylar veya gri düzey ton pencereleri olabilir (Erdoğan, 2007).
Görüntü eĢleme ile ilgili ilk çalıĢmalar 1950‟li yılların sonlarında baĢlamıĢtır. Temelde çözüm analog yönteme dayanmakta olup, korelatörler donanımsal olarak stereo modeldeki gri seviyelerini karĢılaĢtırmaktaydı. EĢleme probleminin sonuçlanmasının neden çok uzun zaman aldığı düĢünülebilir. Bu soruya verilecek ilk cevap, piksel olarak adlandırılan en temel görüntü elemanının bilgi içeriği dikkate alınarak açıklanabilir. 15 μm ile taranan bir hava fotoğrafı yaklaĢık olarak 285 milyon pikselden ve her bir gri tonu da 0 - 255 arasında bir değerden oluĢur. Bu değerlerin büyüklüğü, tek tek piksellere dayalı bir eĢlemenin imkansız olduğunu göstermektedir. Bu nedenle görüntü eĢlemede farklı yöntemler geliĢtirilmiĢtir (Heipke, 1996). Bu
yöntemleri ġekle Dayalı Görüntü EĢleme (Feature Based Image Matching), Alana Dayalı Görüntü EĢleme (Area Based Image Matching) ve ĠliĢkisel Görüntü EĢleme (Relational Image Matching) yöntemleri olarak üç Ģekilde sınıflandırabiliriz (Varlık ve ark. 2009).
Fotogrametrik iĢlem adımlarının çoğunluğu bir Ģekilde eĢleme ile iliĢkilidir. Ġç yöneltmede fotoğraf kenar göstergesinin iki boyutlu modelinin eĢlenmesi, karĢılıklı yöneltmede ve fotogrametrik nirengide nokta transferi, sayısal arazi modellerinde bir görüntü bölümünün diğer görüntü bölümleriyle eĢlenerek üç boyutlu arazi noktalarının elde edilmesi eĢlemeye verilebilecek örneklerdir (Öztürk ve Koçak, 2007). Ayrıca Sayısal Yükseklik Modelleri oluĢturmak için yeniden görüntü eĢlemeye baĢvurulur.
Dijital fotogrametri, otomatik fotogrametrik iĢlemeyle ilgilidir, verinin ölçümü, analizi ve yorumunu kapsar. Bu fotogrametrik iĢlem zincirinin birçok adımı eĢlemeye bağlıdır. Otomatik stereo yöneltmenin yapılabilmesi ve sayısal arazi modeli oluĢturma iĢlemlerinde görüntü eĢlemeye ihtiyaç duyulur. Otomatik stereo yöneltmenin ana problemi bindirmeli iki görüntüdeki eĢlenik noktaları bulmaktır. Problem genelde iki adımda çözülmektedir. Birinci adımda, görüntülerde örtüĢen alanlar bir kaba eĢleme yapılarak belirtilir. Ġkinci adımda bu iĢlemi çok hassas bir nokta eĢleme iĢlemi takip eder. Genelde birinci adımda Ģekle dayalı görüntü eĢleme yöntemleri, ikinci adımda ise çok hassas olan alana dayalı görüntü eĢleme yöntemleri kullanılmaktadır (Varlık ve ark. 2009).
ġekil 3.10. Görüntü eĢleme (Öztürk ve Koçak, 2007)..
Dijital fotogrametri de amaç, dijital görüntülerden en az insan katılımıyla 2 veya 3 boyutlu topoğrafik ve tematik veri çıkarmaktır. Dijital fotogrametride, dijital görüntülerin karĢılıklı ve mutlak yöneltmesi analitik fotogrametrinin prensipleriyle yapılır. Bu iĢlemin otomatik yapılabilmesi için her iki bindirmeli görüntüdeki aynı
noktalar otomatik veya yarı otomatik olarak bulunmalıdır. Bir stereo modelin oluĢturulup, bu modeli yer kontrol noktalarına göre yerleĢtirmek ve böylece istenilen harita projeksiyon sistemini ortaya koymak için gerekli yöneltme iĢlemlerinin yapılması Ģüphesiz analog ve analitik stereo çizim aletlerinde olduğu kadar dijital fotogrametrik sistemlerde de zorunludur. Stereo modelin oluĢturulması için bir görüntüdeki bir alanın, bir Ģeklin veya bir noktanın diğer dijital görüntülerde yerinin araĢtırılması gerekir. Bu araĢtırma iĢlemine görüntü eĢleme denir. Görüntü eĢleme herhangi bir görüntü analiz iĢleminin hemen hemen tamamında anahtar elemandır (Varlık ve ark. 2009).
3.2.3. Görüntü EĢleme Yöntemleri
Görüntü eĢleme, son zamanlarda dijital fotogrametri ve bilgisayarla görmede baĢlıca araĢtırma konusu olmuĢtur. ÇeĢitli eĢleme algoritmaları arasındaki en önemli fark, eĢlemede kullanılan temel elemanların farklı olmasıdır (Erdoğan, 2007). Bu güne kadar yapılan araĢtırmalarda çok sayıda eĢleme yöntemi kullanılmıĢ, hatta bilindik temel yöntemlerin birlikte kullanılması ile farklı yöntemler geliĢtirilmiĢtir (Yao, 1997). Çok sayıdaki bu yöntemleri üç temel baĢlık altında toplanabilir.
ġekle (Detaya) Dayalı Görüntü EĢleme Yöntemleri
ĠliĢkisel (Sembolik-Yapısal) Görüntü EĢleme Yöntemleri
Alana Dayalı Görüntü EĢleme Yöntemleri (ÜstüntaĢ, 2006)
3.2.3.1. ġekle (Detaya) Dayalı Görüntü EĢleme
Bu yöntemde her iki görüntüde belli Ģekillerin çıkartılması gerekir. EĢlemede ikinci adım bu Ģekiller arasında yapılan eĢlemedir. Birinci adımda genellikle noktalar veya kenarlar çıkartılır. Bunun için operatörler veya kenar belirleyicileri kullanılır. Ġkinci adımda referans görüntü (model görüntü) seçilir ve muhtemel eĢleme noktalarının geçici listesi meydana getirilir. Bu iĢte eleman niteliklerinin benzerliğini anlayabilmek için Çapraz ĠliĢki katsayısı kriter olarak kullanılır. Çoklu çözümler olduğunda, bunların tutarlılığı kontrol edilir ve en iyi çözüm seçilir. DeğiĢik ölçü tutarlılıkları mevcuttur. En önemlilerinden biri paralaks büyüklüğüdür.
Yükseklikler ve paralaksların yerel olarak çok az değiĢtiği varsayımı altında belirli bir çözüm civardaki yerel çözümlerden biri ile çakıĢacaktır. Bu yöntemin