Kiplemeli Geni¸s Bant Çeviricinin Sahada
Kalibrasyonu
Online Calibration of Modulated Wideband
Converter
Ya¸sar Kemal Alp
1, Ali Bu gra Korucu
1,2, Ahmet Turan Karabacak
1, Ali Cafer Gürbüz
2, Orhan Arkan
3 1Radar, Elektronik Harp ve Istihbarat Sistemleri, ASELSAN A. ¸S., Ankara, Türkiye2Elektrik ve Elektronik Mühendisligi Bölümü, TOBB ETÜ, Ankara, Türkiye 3Elektrik ve Elektronik Mühendisligi Bölümü, Bilkent Üniversitesi, Ankara, Türkiye {ykalp,abkorucu,ahmetk}@aselsan.com.tr, [email protected], [email protected]
Özetçe Bu çal¸smada ksa zaman önce önerilen, geni¸s
bantl seyrek sinyallerin Nyquist limiti altnda örnekleyerek, sk¸strlm¸s alglama teknikleri ile kaypsz olarak saysalla¸strl-masn saglayan Kiplemeli Geni¸s Bant Çevirici (KGBÇ) sis-teminin sahada kalibrasyonu için yeni bir yöntem önermek-teyiz. Önerdigimiz yöntem, sistemin sahada kalibrasyonunu olanaksz klan network analizör ve vektör spektrum analizör gibi pahal ölçüm aletlerinin yerine, sistemin çal¸sma bandnda temiz sinosoidal sinyaller üretebilen ve çok daha ucuz olan tek bir sentezör kartna ihtiyaç duymaktadr. Ayrca yöntemin i¸slem karma¸sklgnn az olu¸su, FPGAda kodlanarak sistem içine gömülmesini de olanakl klmaktadr. Böylece sistem her açldgnda ba¸ska herhangi bir ölçüm aletine ihtiyaç duymadan kendi kendini kalibre edebilecektir.
Anahtar KelimelerKGBÇ, seyrek, sk¸strlm¸s alglama, Nyquist limiti altnda örnekleme, sahada kalibrasyon
AbstractIn this work, we propose a new method for online
calibration of recently proposed Modulated Wideband Converter (MWC), which digitizes wideband sparse signals below the Nyquist limit without loss of information by using compressive sensing techniques. Our method requires a single frequency syn-thesizer card, which can generate clean tones along the operation band of the system, rather than much expensive measurement instruments such as network analyser or vector spectrum anal-yser, which are not appropriate for online calibration. Moreover, low computational complexity of the proposed method enables its implementation on FPGA so that it can be embedded into the system. Hence, on each power on, the system can utilize self calibration without requiring any additional measurement instruments.
KeywordsMVC, sparse, compressive sensing, sub-Nyquist sampling, online calibration
I. GIRI ¸S
Kiplemeli Geni¸s Bant Çevirici (KGBÇ), sk¸strlm¸s al-glama teorisi tabanl, spektrumu seyrek olan geni¸s bantl (bant geni¸sligi >1 GHz) sinyallerin, bilgi kaybna neden ol-madan, Nyquist limiti altnda örneklenmesini olanakl klan bir sistemdir [1]. Spektrumda seyreklik varsaymna en uy-gun örnek tipik bir elektronik harp senaryosudur. Böyle bir
senaryoda, ortamda birçok radar olmasna ragmen, çok ksa gözlem sürelerinde (örn. 1us), bu radarlarn belirli periyot-larla döndügü ve darbe tekrarlama aralklarnn darbe geni¸s-liklerine orannn da yüksek oldugu (tipik olarak 100 kat) dü¸sünüldügünde, alnan sinyalin spektrumunun oldukça seyrek oldugu görülmektedir.
KGBÇ sistemin ba¸sarl bir ¸sekilde çal¸sabilmesi için, sis-tem kalibrasyonu yüksek hassasiyet ile yaplmaldr. Scaklk, zaman, vb. gibi sebeplerle sistemdeki RF (radyo frekans) malzemelerin karakteristiklerinin degi¸sebileceginden dolay, kullanlacak olan kalibrasyon yönteminin sahada kalibrasyona uygun olmas gerekmektedir. Ayrca kalibrasyon yönteminin sistemin maliyetine etkisinin de oldukça az olmas beklen-mektedir. [2]de, KGBÇ sisteminin kalibrasyonu için öner-ilen yöntem ayn referans sinyal ile birbirine senkronlanm¸s Agilent-AWG [6] ve NI-PXI [7] gerektirmektedir. Bu sistem-ler hem çok pahaldr hem de KGBÇnin sahada kalibrasy-onunu olanaksz klmaktadr. Bu çal¸smada önerilen yöntem, [2]den farkl olarak, KGBÇnin çal¸sma band boyunca temiz sinosoidal sinyaller üretebilen, maliyeti oldukça ucuz olan tek bir sentezör kart gerektirmektedir. Ayrca yöntemin i¸slemsel karma¸sklgnn da az olmas, yöntemin FPGA üzerinde kod-lanarak sisteme gömülmesini olanakl klmaktadr. Bu sayede sistem her açldgnda, ba¸ska herhangi bir ölçüm aletine ihtiyaç duymadan kendi kendini kalibre edebilecektir.
2. Bölümde KGBÇ sistemi özetlenecek, sistemin temel çal¸sma presibi anlatlacaktr. 3. Bölümde önerilen sahada kalibrasyon yöntemi detaylandrlacaktr. 4. Bölümde benzetim sonuçlar verilecek, sonuçlar ve degerlendirmeler 5. Bölümde yaplacaktr. Makale boyunca kaln büyük karakterler ma-trisleri, kaln küçük karakterleri vektörleri belirtecektir. Aksi belirtilmedigi sürece, toplam sembollerindeki ko¸san indisin −∞ den −∞a gittigi varsaylacaktr.
II. KGBÇ: KIPLEMELI GENI ¸S BANT ÇEVIRICI Blok ¸semas ¸Sekil-1de verilen KGBÇ sisteminin çal¸sma bandn FN yq/2 olarak tanmlayalm. Ortamdaki yaynlarn çok ksa gözlem süreleri boyunca bant geni¸sliklerinin en çokB Hz olacag varsaym ile bu bandL adet alt banda bölelim ve bu alt bantlarn merkez frekanslarn lB, l=0, .., L−1 olarak
¸Sekil 1: Kiplemeli Geni¸s Bant Çevirici blok ¸sema.
tanmlayalm. OrtamdaP adet yaynn bulundugu bir durumda ve bu sisteme gelen sinyali ¸su ¸sekilde modelleyelim:
x(t)= P X p=1
sp(t) (1)
Burada p. yayn sp(t) = ap(t)ej(2πfpt) ile ifade edilebilir olup fp ≤ FN yq/2 yaynn merkez frekansn, ap(t) ise bu yaynn taban bant sinyalini belirtmektedir. Taban bant sinyali Sap(t) ≤ B ko¸sulunu saglamaktadr. Burada Sg(t), g(t) sinyalinin bant geni¸sligini veren operatördür. Her yayn yukarda tanmlanan alt bant frekanslar cinsinden ¸su ¸sekilde yazlabilir:
sp(t) = ap−(t)e
j2π⌊fp/B⌋Bt+ a
p+(t)e
j2π⌈fp/B⌉Bt. (2)
Burada ⌊⌋ ve ⌈.⌉ argümann srasyla kendinden küçük ve kendinden büyük en yakn tamsayya yuvarlayan operatör-lerdir. Her yayn için tanmlanan yeni taban bant sinyalleri ap−(t) ve ap+(t) de Sap−(t) ≤ B, Sap+(t) ≤ B ko¸sullarn
saglayacaktr. Sonuçtax(t) sinyali x(t)= P X p=1 ap−(t)e j2πkp−Bt+ a p+(t)e j2πkp+Bt (3)
olarak yazlabilir. Burada kp−=⌊fp/B⌋, kp+=⌈fp/B⌉ ile
tanml olupkp+−kp−=1dir.
Gelen sinyalx(t), M adet kola bölünüp, her kol birbirinden farkl olan pm(t), m = 1, .., M sinyalleri ile çaplr. Bu sinyaller periyodik olup periyotlar 1/B saniyedir ve Fourier seri açlm kullanarak pm(t) = Pk=cm,kej2πkBt olarak ifade edilebilirler. Burada cm,k, pm(t)nin k. Fourier seri katsaysn belirtmekte olup, herhangi bir t0 için cm,k = BRt0+1/B
t0 pm(t)e
−j2πkBtdt ile hesaplanr. Ayrca p m(t) gerçek oldugu için cm,−k = c∗m,k dir. Bu sinyallerin temsili spektrumlar ¸Sekil-1de Pm(f ) ile belirtilmi¸stir. Her kanalda alçak geçiren ltre öncesinde ¸su sinyaller olu¸sur:
ym(t) = x(t)pm(t)= X
k
cm,kx(t)ej2πkBt. (4)
(4)te verilen e¸sitligin her iki tarafna Fourier dönü¸sümü
uygu-landgnda, Ym(f ) = X k P X p=1 cm,−kp+−kAp+(f −kB) +cm,−kp−−kAp−(f −kB) (5)
elde edilir. Burada Ym(f ), Ap+(f ) ve Ap−(f ) srasyla
ym(t), ap+(t) ve ap−(t)nin Fourier dönü¸sümleridir. Her
kanaldaki alçak geçiren ltrenin durdurma frekansBq/2 Hz seçildiginde, ltre çk¸snda olu¸san sinyal vm(t)nin Fourier dönü¸sümü: Vm(f ) = ˆ q X q′=−ˆq P X p=1 cm,−kp+−q′Ap +(f −q ′B) +cm,−kp−−q′Ap−(f −q ′B) (6) olarak yazlabilir. Burada q her bir analog kanal çk¸snda saysal olarak olu¸sturulacak kanal saysn ifade etmektedir [1] ve q = (q − 1)/2 ile tanmldr. vˆ m(t) sinyali örnekleme frekans en azBq hz ile örneklenendiginde
vm(tn) = ˆ q X q′=−ˆq P X p=1 cm,−kp+−q′ap +(tn)e j2πq′Btn .+cm,−kp−−q′ap −(tn)e j2πq′ Btn, (7)
saysal sinyali elde edilir. Buradatn, n = 0, .., N −1 örnekleme anlarn ifade etmekte olup |tn − tn+1| ≤ 1/(Bq)dir. Her q′ degeri için, v
m(tn) saysal sinyali e−j2πq
′
Btn ile çarplp
merkez banda çekilerek, durdurma frekans qB/2 olan bir saysal ltreden geçirildiginde
zm,q′(tn) = P X p=1 cm,−kp+−q′ap +(tn)+cm,−kp−−q′ap−(tn), q′= −ˆq, .., ˆq . (8) saysal sinyalleri olu¸sur. Sonuçta M adet analog kanal olan KGBÇsisteminde q × M kadar saysal kanal elde edilir. Her bir kanaldanN kadar örnek toplandgnda, toplanan örnekler
denklem sistemi ile ifade edilebilir. Burada, Z ve C matrisleri ZMq×N = z1,−ˆq(t0) z1,−ˆq(t1) .. z1,−ˆq(tN −1) z1,−ˆq+1(t0) z1,−ˆq+1(t1) .. z1,−ˆq+1(tN −1) . .. . z1,ˆq(t0) z1,ˆq(t1) .. z1,ˆq(tN −1) z2,−ˆq(t0) z2,−ˆq(t1) .. z2,−ˆq(tN −1) . . .. . . . .. . zM,ˆq(t0) zM,ˆq(t1) .. zM,ˆq(tN −1) , CMq×2L+1= c1,−L−ˆq c1,−L+1−ˆq .. c1,L−ˆq c1,−L−ˆq+1 c1,−L+1−ˆq+1 .. c1,L−ˆq+1 . . .. . c1,−L+ˆq c1,−L+1+ˆq .. c1,L+ˆq c2,−L−ˆq c2,−L+1−ˆq .. c2,L−ˆq . . .. . . . .. . cM,−L+ˆq cM,−L+1+ˆq .. cM,L+ˆq , (10) ile tanmldr. A(2L+1)×N matrisi, lp± = L + 1 + kp±, p =
1, .., P numaral satrlarnda [ap±(t0), ...ap±(tN −1)] yazan,
diger bütün elemanlar 0 olan, grup seyrek bilinmeyen ma-trisidir. Amacmz ölçüm matrisi Z ve sistem matrisi C ver-ildiginde A matrisinin 0 olmayan satrlarn tespit etmek ve bu satrlar kestirmektir. Ann satr says, Znin satr saysndan fazla oldugu için (9)da verilen sistemin sonsuz adet çözümü vardr. Ancak A matrisinin seyrek oldugu varsaym ile (9)u saglayan en seyrek A matrisi kestirilebilir. Bu kestirim için literatürde yaynlanm¸s birçok yöntem vardr [3], [4]. Bu yön-temler ile Ann 0 olmayan satr numaralar ˜lp±, p = 1, 2, .., P tespit edildiginde, ortamdaki sinyallerin taban banda indirilmi¸s halleri˜ap±(tn), p=1, .., P, n=0, .., N −1 ¸su ¸sekilde kestirilir:
˜ A=[c˜
l1−c˜l1+ .. c˜lP−cˆlP+]
†Z.
(11) Burada C matrisinin ˆlp numaral sütünu cˆlp ifade edilmi¸s olup
˜
A matrisinin2p−1 numaral satrnda ˜ap−(tn), n=0, .., N −1,
2p numaral satrnda ise ˜ap+(tn), n = 0, .., N − 1
yaz-maktadr. (.)† ise X† = (XHX)−1XH ile tanml sahte ters operatörüdür. Ortamdaki yaynlarn taban banda indirilmi¸s hallerinin kestirimleri ise
˜
ap(tn)=˜ap−(tn)+˜ap+(tn)e
j2πBtn n = 0, .., N − 1 (12)
ile olu¸sturulur.
III. ÖNERILEN SAHADA KALIBRASYON YÖNTEMI
(9)da verilen C matrisininL + 1 + k numaral kolonunu kestirmek için KGBÇnin giri¸sinden, kB + ∆f frekansnda genligini (a) bildigimiz ama faz (φk) bilinmeyen sinosoidal siyal verelim. Notasyonu basitle¸stirmek için bu sinyali kar-ma¸sk olarak tanmlayalm:
x(t) = aej(2π(kB+∆f )t+φk) . (13)
Burada ∆f <B/2 ko¸sunu saglasn. Bu sinyal M adet kola bölündükten sonra, her kanalda ilgili pm(t) ile çarplp en az Bq Hz ile örneklenerek N adet örnek toplandgnda (tipik olarak N = 1024) ¸su saysal sinyal elde edilir:
vm(tn) = a ˆ q X q′=−ˆq cm,−(k+q′)ej2π(−q ′ B+∆f )tn× H(−q′B+∆f )ejφk, n = 0, .., N − 1, m = 1, .., M. (14)
Burada H(f ), herbir kanalda özde¸s olan alçak geçiren l-treninf frekansndaki karma¸sk S21 parametre ölçümünü ifade etmektedir. (14)te verilen sinyalin içindeki q adet sinüsün genlik ve faz degerleri [5]teki yöntem ile yüksek hassasiyet ile kestirilebilir. Kestirilen bu degerler
bm,−(k+q′)= acm,−(k+q′)ejφkH(−q′B + ∆f ),
q′= −ˆq, .., ˆq, m = 1, .., M, (15) ¸seklinde karma¸sk saylar halinde ifade edildiginde, C ma-trisinin L + 1 + k numaral kolonundaki degerler:
˜
cm,−(k+q′)= bm,−(k+q′)/(aH(−q′B + ∆f ))
(16) ile hesaplanm¸s olur. Bütün kolonlar için (k = −L, .., L) için bu i¸slem tekrarlandgnda, kestirilen C matrisi ¸su ¸sekilde ifade edilebilir:
˜
c= [c1ejφ−L, c
2ejφ−L+1, .., c2L+1ejφL] (17) Burada cp, C matrisinin p numaral kolonunu belirtmektedir. Bu matris (9)dan sonra tanmlanan orjinal C matrisi ile kyaslandgnda, her bir kolonunun birbirinden farklejφk, k =
−L, .., L faz terimleri ile çarpldg görülmektedir. Bu faz hatalarna ragmen, her kolondaki tüm satrlar ayn faz hatas sahip oldugu için aktif olan alt bantlar ba¸sarl bir ¸sekilde tespit edilebilecektir. Ancak, aktif olan alt bantlarn taban bant sinyalleri
˜
ap±(tn) = ap±(tn)e
jφkp±
(18) ileφkp± radyanlk faz kaymas ile geri çatlacaktr. Ortamdaki
yaynlarn taban bant sinyalleri ise (11) kullanldgnda ˜ ap(tn) = ap−(tn)e jφkp− + ap+(tn)e jφkp+ ej2πBtn (19)
olarak kestirilecek ve kom¸su alt bantlardaki taban bant sinyal kestiriminde olu¸san faz kaymalar ejφkp− ve ejφkp+
bir-birinden farkl oldgu için ba¸sarl geri çatlm gerçekle¸smeye-cektir. Olu¸san faz kaymalarn düzeltmek için ¸su sinyalleri tanmlayalm: rp−(tn) = ap−(tn)e jφkp− rp+(tn) = ap+(t)e jφkp+ ej2πBtn . (20)
Bu sinyaller ayn yayndan geldigi için, her iki sinyalinB/2 Hzde hesaplanan ayrk zamanl Fourier transformlarnn bir-birine e¸sit olmas gerekmektedir. Dolays ile,rp+(tn)
sinya-line uygulanmas gereken faz düzeltme katsays β = α/|α| olup α= N −1 X n=0 rp−(tn)e −j2πB/2tn ! / N −1 X n=0 ˆ rp+(tn)e −j2πB/2tn ! (21) ile hesaplanr ve (12)de verilen ifade
˜
ap(tn) = ˜ap−(tn) + β˜ap+(tn)e
j2πBtn (22)
olarak revize edilir. Bu sayede geriçatlmda olu¸san kalibrasyon kaynakl faz kaymalar düzeltilmi¸s olur.
IV. SIMULASYONLAR
Önerilen yöntemin performansn analiz etmek için, tasarm parametreleri Tablo-Ide verilen KGBÇ sistemini bilgisayar or-tamnda simule ettik. Anlk olarak görmek istedigimiz bandn geni¸sligini FN yq/2 = 1500 MHz olarak belirledik. Alt bant geni¸sligini B = 30 MHz olarak seçerek anlk olarak gözlem-lemek istedigimiz bandL = 50 alt banda böldük. Sistemdeki analog kanal saysnM = 4 ve kanallardaki örnekleme hzn Fs= 250 MHz olarak seçerek toplamda 1 GHzlik örnekleme hz kullanm¸s olduk (Nyquist limitinin 1/3ü). Her bir analog
Deger Açklama FN yq 3000MHz Sistemin Nyquist frekans
M 4 analog kanal says
q 7 Her bir analog kanaldan olu¸sturulan saysal kanal says B 30 MHz Her bir analog kanaldan olu¸sturulan saysal kanal says Fs 250 MHz Her bir analog kanal kanaldaki ADCnin örnekleme hz
L 50 30MHzlik alt bant says
Tablo I: KGBÇ Sistemi Simülasyon Parametreleri
kanaldan saysal ltreleme i¸slemleri ile q = 7 adet saysal kanal olu¸sturduk. Önerilen yöntem ile sistem kalibrasyonu yaparak (10)da verilen C matrisinin içini doldurduk.
Iki radarn oldugu bir ortam simule etmek için KGBÇ sistemi giri¸sine gelen sinyali ¸su ¸sekilde modelledik:
x(t) = a1(t)ej(2πf1t)+ a2(t)ej(2πf2t)+ n(t). (23) Burada a1(t) ve a2(t), geni¸slikleri 0.1 us ve 0.2 us olan radar darbelerinin zararn belirtmektedir. Bant geni¸slikleri srasyla ortalama 10 MHz ve 5 MHz olan bu darbelerin merkez frekanslarn f1 = 915 × 106 Hz f2 = 1215 × 106 olarak seçtik (Ilk darbe 30. ve 31. alt banda, ikinci darbe 40.ve 41. alt banda daglacak). Darbe genliklerini ise srasyla1 mV ve0.5 mV olarak belirledik. Dü¸sük genlikli darbede 10dBlik SNRa eri¸smek için, n(t) ile belirtilen, 0 ortalamal Gauss daglml karma¸sk sistem gürültüsünün standart sapmasn ise 0.05/p(2) mV olarak seçtik. Senaryo ¸sartlarn zorla¸strma adna radar darbelerin çak¸stgn varsayarak ilk radara ait olan darbenin geli¸s zamannn 4.95us, ikinci darbenin geli¸s zamannn ise 4.9us olarak belirledik.
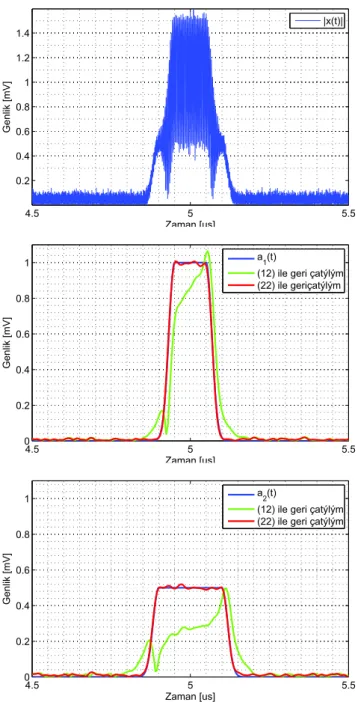
¸Sekil-1de, yukarda KGBÇ sistemine gelen sinyalin gen-ligi (|x(t)|) verilmi¸stir. Görüldügü üzere iki radara ait olan darbeler zamanda çak¸smaktadr. Önerilen kalibrasyon yöntemi ile C matrisi ba¸sarl bir ¸sekilde dolduruldugu için 50 adet alt banttan, 30,31,40,41 numaral alt bantlarn aktif oldugu tespit edilmi¸stir. 30 ve 31 numara alt bantlar 1.radar darbesine, 40 ve 41 numaral alt bantlar ise ikinci radar darbesine aittir. Ayn ¸sekil üzerinde ortada, 1. radarn darbe zarf a1(t) (mavi), 30 ve 31. alt bantlardan gelen sinyalin (12) ile birle¸stirilerek faz düzeltmesi yapmakszn geriçatlm sonucu (ye¸sil) ve önerilen faz düzeltme faktörünü içeren (22) ile yaplan geriçatlm sonucu (krmz) verilmi¸stir. A¸sagda ise ayn sonuçlar 2. radar radar darbesi için tekrarlanm¸str. Görüldügü üzere, her iki radar darbesinin enerjisi kom¸su bantlara yayldg için, faz düzeltmesi yaplmayan geriçatlm sonuçlarnda darbe ¸sekli bozulurken, önerilen yöntem ile kom¸su bantlarda olu¸san faz kaymas düzeltilerek ba¸sarl geri çatlm gerçekle¸stirilmi¸stir.
V. SONUÇLAR
Bu çal¸smada Nyuqist limiti altnda örnekleme yapmay mümkün klan KGBÇ sisteminin sahada kalibrasyonu için yeni bir yöntem önerilmi¸stir. Önerilen yöntem, KGBÇnin çal¸sma band boyunca temiz sinosoidler üretebilen, piyasada kolaylkla bulunabilen ve maliyeti oldukça dü¸sük olan tek bir sentezör kart gerektirmektedir. Yaplan benzetimlerde, gelen sinyalin enerjisinin kom¸su bantlara dagldg durumlarda bile, önerilen yöntem ile ba¸sarl geriçatlmlar yaplabildigi gözlemlenmi¸stir.
KAYNAKÇA
[1] M. Mishali, Y. Eldar, From Theory to Practice: Sub-Nyquist Sampling of Sparse Wideband Analog Signals", IEEE Journal of Selected Topics in Signal Processing, 2010. 4.5 5 5.5 0.2 0.4 0.6 0.8 1 1.2 1.4 Zaman [us] G e n lik [mV] |x(t)| 4.5 5 5.5 0 0.2 0.4 0.6 0.8 1 Zaman [us] G e n lik [mV] a 1(t)
(12) ile geri çatýlým (22) ile geriçatýlým 4.5 5 5.5 0 0.2 0.4 0.6 0.8 1 Zaman [us] G e n lik [mV] a2(t)
(12) ile geri çatýlým (22) ile geri çatýlým
¸Sekil 2: Benzetim sonuçlar. Yukarda, KGBÇ sistemine gelen sinyalin büyüklügü |x(t)|; Ortada, 1. radarn darbesi a1(t) (mavi) ve bu darbenin (12) ile yaplan kestirimi (ye¸sil) ve (22) ile yaplan kestirimi (krmz); A¸sagda 2. radarn darbesia2(t) (mavi) ve bu darbenin (12) ile yaplan kestirimi (ye¸sil) ve (22) ile yaplan kestirimi (krmz)
[2] E. Israeli, S. Tsiper, D. Cohen, E. Shoshan, R. Hilgendorf, A. Reysenson, Y. Eldar, Hardware Calibration of the Modulated Wideband Converter", Globecom, 2014
[3] S. Cotter, B. Rao, D. Cohen, K. Engan, K. Delgado, Sparse Solutions to Linear Inverse Problems With Multiple Measurement Vectors", IEEE Transactions on Signal Processing, 2005
[4] M. Mishali, Y. Eldar, Reduce and Boost: Recovering Arbitrary Sets of Jointly Sparse Vectors", IEEE Transactions on Signal Processing, 2008. [5] T. Grandke, Interpolation Algorithms for Discrete Fourier Transforms of Weighted Signals", IEEE Transactions on Instrumentation and Mea-surement, 1983.
[6] Agilent Arbitrary WaveForm Generator, www.keysight.com. [7] National Intruments-PXI, www.ni.com.