ADAPTIVE FILTERING APPROACHES
FOR NON-GAUSSIAN STABLE
PROCESSES
Orhan Arzkanl,
Murat
Belgel,
A .
Enis Cetin2 and Engin Erzin'
'Bilkent
University, Ankara, TURKEY.
2 K o ~
University, Istanbul, TURKEY.
ABSTRACT
A large class of physical phenomenon observed in practice exhibit non-Gaussian behavior. In this paper, a-stable dis- tributions, which have heavier tails t h a n Gaussian distribu- tion. are considered t o model non-Gaussian signals. A d a p tive signal processing in t he presence of such kind of noise is a requirement of many practical problems. Since, direct application of commonly used adaptation techniques fail in these applications, new approaches for adaptive filtering for a-stable random processes are introduced.
1. INTRODUCTION
In many signal processing applications t he noise is modeled as a Gaussian process. Thi s assumption has been broadly accepted because of t he Central Limit Theorem. However, a large class of physical observations exhibit non-Gaussian behavior, such as low frequency atmospheric noise, many types of man-made noise and underwater acoustic noise [1]- 131. There exists an important class of distributions known as a-stable distributions [ 5 ] which can be used t o model this type of noises. These distributions have heavier tails than those of Gaussian distribution, and they exhibit sh arp spikes or occasional bursts in their realizations. A random variable is called a-stable if its characteristic function has the following form:
o ( t ) = ezp{zat - yltl"[I
+
z p s z g n ( t ) w ( t , a ) ] } (1)y
>
0 , 0<
(Y5
2, -15
,85 1
andwhere --x,
<
a<
CO,t a n ( a a / 2 ) for a
#
1a
log It1 for a = 1.u ( t , a ) =
There is no compact expression for t he probability density function of these random variables except a = 1 and 2 cases which correspond t o the Cauchy and Gaussian distri- butions. respectively.
Llembers of stable distributions also satisfy a general- ized central limit theorem which states t hat if the s u m of i i.d. random variables converges then the limit distribution is a stable one. If individual distributions are of finite vari- ance then t he limit distribution is Gaussian. Tails of this type of distributions are characterized with the a parameter ( 0
<
cy5
2 ) which is called as t h e characteristic exponent ( N values close t o 0 indicates impulsive nature and a val-u c s close to 2 indicates a more Gaussian type of behavior).
W i t h t h e Gaussian assumption, signals could be treated in
a Hilbert space framework which would allow t h e use of Lz (or
P;)
I.--= in various ont,imization criteria. Whereas. the linear vector space generated by a-stable distributions is a Banach space when (15
cy<
2). In t h e linear space ofstable processes only p-norms exists for p
5
cy, hence.norm cannot b e used with a n a-stable processes. Modeling a-stable processes under a Gaussian assumption leads t o unacceptable results as is reported in [5].
In this paper, various approaches t o adaptive filtering is investigated under additive a-stable noise with finite mean corresponding t o case of 1
5
a<
2. These approaches are also compared t o recently introduced p-norm algorithms [4, 51. T h e p-norm algorithms are presented in Section 2 an d t h e use of pre-nonlinearity in adaptive filtering is in- vestigated i n Section 3. T h e simulation results are given in Section 4.2. ADAPTIVE FILTERING FOR a-STABLE
PROCESSES
T h e objective for a general filtering application is t o find an
FIR
filter of lengthN ,
tu,t h a t relates t h e i n p u t , z ( n ) tot h e desired signal d ( n ) :
@) =
&(k)'
(3 )where d ( k ) is t h e estimate of t h e desired signal a t time instant
k,
a n d-
z(k) = [z(k) z(k - 1) ' . . z ( k - N
+
l)]' . ( 4 ) Commonly used adaptive filtering algorithms utilize the Hilbert space framework. This allows t h e use of least squares cost function whose solution can be found either exactly asin Recursive Least Squares (RLS) algorithms or approxi- mated by Least-Mean-Squares (LMS) type methods [7, 81.
However, in t h e existence of a-stable processes least squares cost function cannot be defined because the variance of the error is not finite. Hence a new cost function other than least squares should be used.
I n this work, we consider a n adaptation algorithm for an F I R filter of length
N.
T h e problem is t o adaptively u p d a t e t h e tap weights of t h e FIR filter, zu, such t h a t given an input sequence ~ ( n ) , t h e output of t h e filter is close t o t he desired response d ( n ) , both of which is assumed t o be a-stable. Inthis case, i t is appropriate t o minimize t h e dispersion of the error function [5].
This adaptation problem can be solved asymptotically by using the stochastic gradient method with the motiva- tion of the LMS algorithm [8]. Such an algorithm, least mean p-norm ( L M P ) algorithm, is proposed in [ 5 ] . This algorithm is a generalization of instantaneous gradient de- scent algorithm t o a-stable processes, where the gradient of the p-norm of the error,
J = E[l4k)lPJ
= E[ld(k) - w(k)' E(k)lPl, 0
<
P<
a ( 5 )is used, and the t a p weights,
E,
are adapted at time stepk
+
1 as follows:-
w ( k+
1) =d k )
+
I.L le(k)lP-' s g n ( e ( k ) )c(k)
(6) where j~ is the step size which should be appropriately de-termined. Note t h a t , for p = a = 2 the L M P algorithm reduces t o the well-known LMS algorithm [8]. When p is chosen as 1, the LMP algorithm is called the Least Mean Absolute Deviation (LMAD) algorithm 151:
-
w ( k+
1) =w(k)
+
I.L s g n ( e ( k ) )c(k)
(7) which is also known as the signed-LMS algorithm.In this paper we introduce two normalized adaptation algorithms with the motivation of the Normalized-LMS al- gorithm. T h e first one, Normalized Least Mean p-Norm (NLMP) algorithm, uses the following update:
where
P,A
>
0 are appropriately chosen update parame-ters. In (8) normalization is obtained by dividing the up- date term by the p n o r m of the input vector,
~ ( k ) .
T h e reg- ularization parameter, A, is used t o avoid excessively large updates in case of a n occasionally small inputs. For p = 2, NLMP (8) reduces t o the Normalized-LMS algorithm [8].T h e second algorithm, Normalized Least Mean Abso-
lute Deviation (NLMAD), corresponds t o t h e case of p = 1 in (8) with t h e following time update:
This adaptation scheme is especially useful when the char- acteristic exponent, a, either is unknown or varying in time. Among the stable distributions the heaviest tail occur for
the Cauchy distribution, a = 1. By selecting p = 1 the update term is guaranteed t o have a finite magnitude for all 1
< a
5
2 . Due t o the above reasons NLMAD is a safechoice for the adaptation.
Recently, another class of normalized LMS type algo- rithms are also reported in [9, lo]. These algorithms are different from ours and they are developed in different con- text for white Gaussian input and Laplacian noise.
3.
USE
OF PRENONLINEARITY INADAPTIVE FILTERING
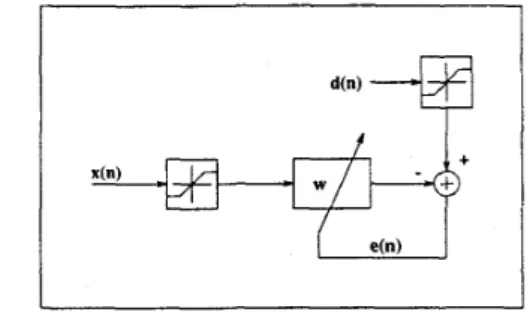
In this section t h e performance of LMS and RLS algorithms running on nonlinearly transformed d a t a will be investi- gated. In this paper, we consider the use of a softlimiter as
shown in Figure 1. T h e motivation behind this approach is able t o reduce the effect of spiky characteristic of the CY-
stable data.This type of regularization have been used in robust signal processing applications [ll]. I t can be easily shown t h a t any random process which is passed through a
softlimiter has finite variance. Thus, the LMS and RLS al- gorithms can be used in adaptation process after the input and reference signals have been soft-limited. T h e optimal filter coefficients which LMS and RLS converge are biased. However, the bias so introduced can be kept a t a reason- ably small level by a proper selection of threshold value. T h e use of softlimiter reduces the spiky characteristics of input d a t a hence a much smoother convergence can be ex- pected. Because of the use of a nonlinear mapping we call the well-known LMS and RLS algorithms as NMLMS and NMRLS. One noteworthy feature of this technique is that i t has the same computational complexity as well-known LMS and RLS algorithms. Because of the nonlinear map- ping involved we call the proposed algorithms as
NMLMS
and NMRLS. A sample sequence of AR process disturbed by a-stable ( a = 1.8) noise and t h e output sequence after the soft limiter are shown in Figure 2.
Figure 1: Transform domain adaptive filtering block dia-
gram.
150, , , .
.
. ,.
,.
,
Figure 2 : A sample A R process disturbed by a-stable ( a = 1.8) noise ( a ) , and the output process after the soft limiter (b).
4. SIMULATION STUDIES
- 0 2 -
In simulation studies we consider A R ( N ) a-stable processes, which are defined as follows,
N
.(n) = a , z ( n - 2 )
+
a ( n ) (10)t = l
where U(.) is a a-stable sequence of i.i.d random variables. The common distribution of ~ ( n ) is chosen t o be an even function
( p
= O ) , and the gain factors are all set t o one( y = 1) without loss of generality. It can be shown t h a t z ( n )
will also be a a-stable random variable with t h e same char- acteristic exponent when { a , } is an absolutely summable sequence [5, 61.
T w o sets of simulation studies are performed. In the first set, the adaptation algorithms NLMAD, NLMP, LMAD, LhW and LMS are compared for a second order a-stable
A R
process with a fixed characteristic exponent, a = 1.2. In t h e second set the performances of NLMAD, NLMP, NMLMS and NMRLS algorithms are compared for a second order a-stable AR process with different values of the character- istic exponent. For both sets, the t a p weights are obtained by averaging 40 independent trials of the experiment and for each trial, a different computer realization of t h e process{ U ( % ) } is used. To get a fair comparison between algorithms
the step sizes of adaptive algorithms are chosen in such a way t h a t they
aU
had a comparable steady-state variance. For both simulation set the coefficients of AR(2) is chosen as a1 = 0.99 and a2 = -0.1.~ NLMAD - - - - LMAD
NLMP - - - LMp ... LMS
" f
l /
I
Figure 3: Transient behavior of tap weights in the NLMAD,
N L M P , L M A D , L M P and L M S algorithms with a = 1.2. In the first part of t h e simulations, A R parameters g
are estimated by a Z n d order LMP, LMAD, NLMP, NL- M A D and LMS algorithms. T h e plot of the t a p weights is given in Figure 3. In the first part we observed t h a t the
normalized algorithms NLMAD and NLMP outperformed other algorithms. Therefore, in the second part the per- formances of NMLMS and NMRLS are only compared to
NLMAD and NLMP algorithms.
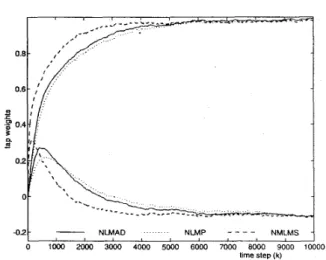
In t h e second part of the simulations, A R parameters are estimated by a
and
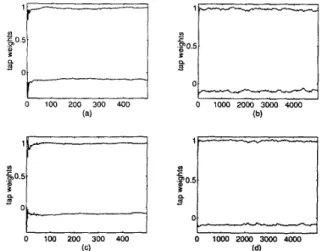
order NLMP, NLMAD, NMLMS and NMRLS algorithms for two different a-stable AR processes with a = 1.2 and a = 1.8. T h e plots of the t a p weightsfor NLMAD, NLMP and NMLMS algorithms are given in Figure 4 and Figure 5 for a = 1.2 and a = 1.8, respectively. T h e t a p weights convergence performance of the NMRLS is given in Figure 6 for a = 1.2 and a = 1.8.
a2L - NLMAD NLMP - - - - NMLMS
4
1 I
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
nme step (k)
Figure 4: Transient behavior of tap weights in the
N M L M S ,
NLMAD, N L M P algorithms with a = 1.2.
0 2 - NLMAD NLMP - - - - NMLMS
0 < W O Moo 3000 4000 5000 6000 7oW 8000 9000 1
time step (k)
100
Figure 5: Transient behavior of tap weights in the N M L M S ,
NLMAD,
N L M P
algorithms with a = 1.8.5. CONCLUSION
In this paper, new adaptive filtering approaches in t h e pres- ence of a-stable random processes are introduced. These approaches are developed with t h e motivation of p-norm normalization in l p spaces 1
5
p5
2, and the use of pre- nonlinearity in adaptive filtering. In our simulation studies the normalized algorithms NLMAD and N LM P outperformthe
LMAD, LMP
and LMS type algorithms. T h e use of pre- nonlinearity inLMS
type algorithm exhibits a faster con- vergence than NLMAD andNLMP
algorithms in the t a p weight adaptations. However, pre-nonlinearity introduced an off-set to the steady state values of the t a p weights. In our simulation examples, these off-set values are negli- gible, but it should be observed for higher order n-stable processes. T h e convergence of the RLS algorithm with the pre-nonlinearity outperforms other algorithms with a higher steady state variance. Also, NMRLS algorithm introduces an off-set, especially for low a values. T h e use of other non- linearities and the effect of off-set for higher order systems will be investigated as a future work.’
7
O0 100 200 300 400 H .$0.5e l
* I I 0 1000 2000 3000 4000 (b) O0 io00 2000 3000 4ooo MFigure 6: Transient behavior of tap weights in the N M R L S
algorithm with a
=
1.8 (a,),@,), and a=
1.2 (c),(d).6. REFERENCES
B. blandelbrot and J .
Vf.
Van Ness, “Fractional brow- nian motions, fractional noises, and applications,” SIAM Review, vol. 10, pp. 422-437, 1968.S.S. Pillai, M. Harisankar, “Simulated performance of a DS spread spectrum system in impulsive atmospheric noise,”
IEEE
Trans. Electromagnetic Compat., vol. 29, pp. 80-82, 1987.M.
Bouvet and S. C. Schwartz,“ Comparison of adap- tive and robust receivers for signal detection in am- bient underwater noise,”IEEE
Trans. Acoust. Speech an d Signal Proc,, vol. 37, pp. 621-626, 1989.0. Arikan, A.E. Getin and E. Erzin, “Adaptive filter- ing for non-Gaussian stable processes,” presented in Twenty-eight Annual Conference on Information Sci- ences a n d Systems, Princeton, N.J., March 1994. M. Shao and C. L. Nikiw, “Signal Processing with fractional lower order moments: Stable Processes and their applications,” Proc. IEEE, vol. 81, pp. 986-1009, 1993.
[6]
Y.
Hosoya, “Discrete-time stable processes and their certain properties,” Ann. Prob., vol. 6, no. 1, pp. 94-105, 1978.
[ 7 ] J.
M.
Cioffi, “An Unwindowed RLS Adaptive LatticeAlgorithm,” IEEE Trans. on ASSP, vol. 36, no. 3 , pp. 365-371, March 1988.
[8] B. Widrow and S.D. Steams, Adaptive Signal Process- ing, Prentice Hall, NJ, 1985.
[9]
N.L.
Freire and S.C. Douglas, “Adaptive cancellation of geomagnetic background noise using a sign-error normalized LMS algorithm,” Proc. IEEE Innternationcd Conf. on Acoustics, Speech, a n d Signul Processing, vol 3, pp. 523-526, April 1993.i
[lo] S.C. Douglas, “A Family of Normalized LMS Algo- rithms,” Signal Processing Letters, vol. l , no. 3, pp. 49-51, March 1994.
[ll] S.A. Kassam and H.V. Poor, “Robust techniques for
signal processing: a survey,” Proc. of IEEE, vol. 7 3 .
pp. 433-481, March 1985.