W Data-AidedAutoregressiveSparseChannelTrackingforOFDMSystems
Tam metin
Şekil
Benzer Belgeler
Abstract—In this paper, an iterative and computationally efficient data detection algorithm is proposed based on the space alternating generalized expectation maximization
In this work!, a new frame structure and pilot symbol aided channel estimation (PSA-CE) technique with a piecewise linear interpolation is proposed for the
Özetre - Bu bildh'ide, seyrek yapldaki sualtl akustik kanallar üzerinden 4;ab�an gü4;lendh'-ve-aktar (AF) i�birlikli röle tabanh dik frekans bölmeli 4;ogullamah
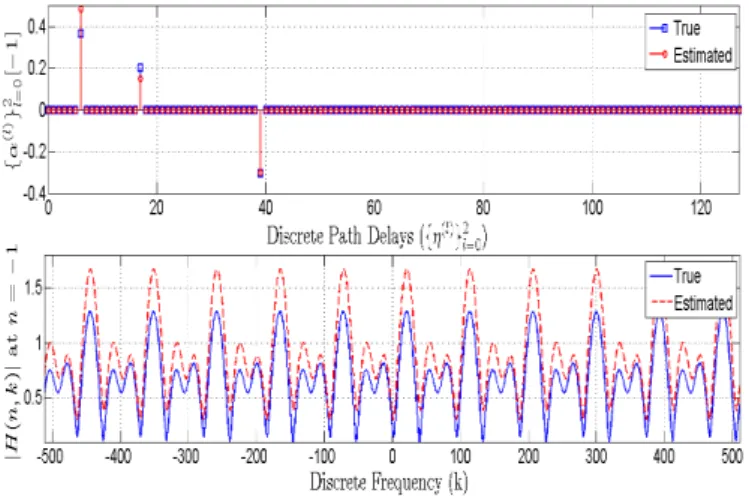
In this paper, a new channel estimation algorithm has been proposed for OFDM systems operating over frequency selective and very rapidly time-varying channels, based on the
Bu çalışmanın temel amacı, Sovyetler Birliğinin dağılmasının ardından kurulan Rusya Federasyonu’nun siyasi lideri olarak Vladimir Putin’in göreve geldiği
Yani de mek isterim ki, Hüseyin Kemal bu otuz yıl içinde, kendisini hiç rehavete kaptırmadan, hiç bir gün muvaffakiyetlerini kâfi gör meden, inceden inceye
pan sanatkâr eller, çiçek resimleri çizen ma hir ressamlar, bu güzel yaratıkların şekilleri ni benzetmekte ne kadar muvaffak olurlarsa olsunlar, binbir tenevvü
Marmara Bölgesindeki işadamı derneklerini kapsayan Marmara İş Hayatı Dernekleri Fe- derasyonu (MARİFED), 16’sı İstanbul’un değişik semtlerinde örgütlenmiş olmak
