T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
DEMĠRYOLU BALĠZLERĠNĠN DURUM TAKĠP SĠSTEMĠ TASARIMI VE
GERÇEKLEġTĠRĠLMESĠ Veysel GÖKDEMĠR YÜKSEK LĠSANS TEZĠ Elektrik Elektronik Mühendisliği
Temmuz-2017 KONYA Her Hakkı Saklıdır
iv
ÖZET
YÜKSEK LĠSANS TEZĠ
DEMĠRYOLU BALĠZLERĠNĠN DURUM TAKĠP SĠSTEMĠ TASARIMI VE GERÇEKLEġTĠRĠLMESĠ
Veysel GÖKDEMĠR
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Elektrik Elektronik Mühendisliği Anabilim Dalı
DanıĢman: Doç.Dr. Seral ÖZġEN 2017, 88 Sayfa
Jüri
Doç. Dr. Ercan YALDIZ Doç.Dr. Seral ÖZġEN
Yrd. Doç. Dr. M. Fatih ÜNLERġEN
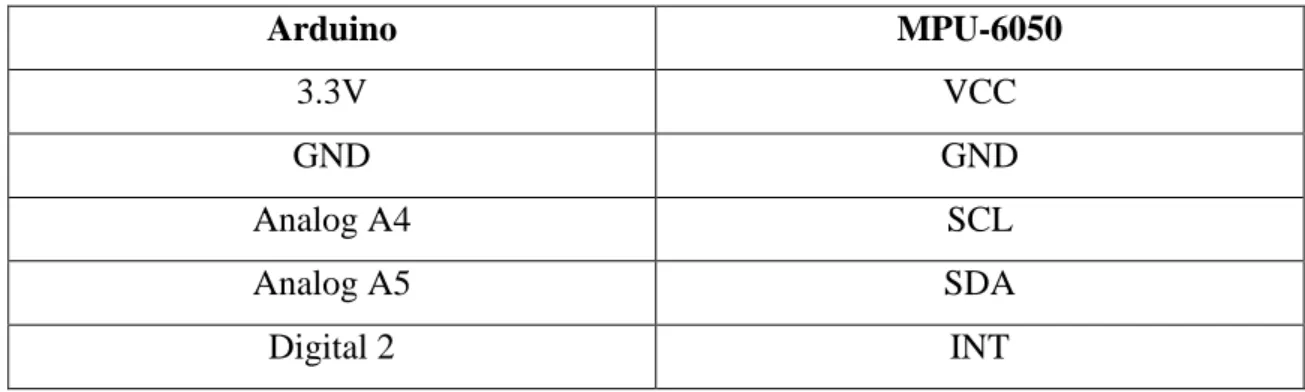
Bu çalışmada demiryolları sinyalizasyon sistemlerinde kullanılan balizlerin titreşim ve konum bilgilerinden bir arıza takip sistemi geliştirilmiştir. Demiryollarında hızlı tren trafiğinden dolayı meydana gelen titreşimler ve demiryolu araçlarının darbeleri sonucu bir çok saha ekipmanı zamanla sabitlendiği yerde gevşemekte veya kırılmakta olup bakım istemektedir. Saha ekipmanları arasında balizler trenlere bilgi aktarma açısından çok önemli bir haberleşme rolüne sahiptir. Bu açıdan balizlerin gevşeme, yerinden çıkma, veri bağdaşım hatası gibi durumlarını önceden tespit ve kontrol ederek bakım onarım çalışmalarının verimlileştirilmesi, trenlerin tehirsiz seyir etmeleri, arıza yerinin önceden tespit edilmesi ve arızaya hızlı bir şekilde müdahale amaçlanmıştır. Bu çalışmada laboratuvar ortamında Aurduino Uno ve MPU6050 IMU sensör kullanılarak I2C, Modbus RTU ve RS485 standartları ile haberleşme sağlanmıştır. Kullanılan her bir IMU sensör slave konumunda olup C# ile tasarlanan bilgisayar arayüzü de master konumundadır. Arayüz ile sistemdeki arıza durumları anlık kontrol edilmektedir.
IMU ve Arduino devresinin balize entegre edildiği varsayılarak yapılan testlerde arayüzün sensör hareketlerine anlık tepki verdiği ve sistemin çalıştığı görülmüştür.
v
ABSTRACT MS THESIS
DEVELOPMENT AND DESIGN OF RAILWAY BALISES’ STATE MONITORING SYSTEM
Veysel GÖKDEMĠR
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE IN ELECTRICAL ELECTRONICS ENGINEERING
Advisor: Assoc. Prof. Dr. Seral ÖZġEN 2017, 88 Pages
Jury
Assoc. Prof. Dr. Ercan YALDIZ Assoc. Prof. Dr. Seral ÖZġEN Asst. Prof. Dr. M. Fatih ÜNLERġEN
In this project, a failure monitoring system has been developed by using the vibration and location information of balises in railway signaling. A lot of field equipments in railway are loosening and broken in time period so that they need maintenance due to the vibrations that occur due to high speed train traffic and railway vehicle impact. Among field equipments, balises have very important role of communication in terms of transmitting information to trains. In this scope, it has been aimed to make maintenance works more efficient, has no delayed trains, detect previously failure location and intervene in failure timely, by detecting and controlling the balise cases such as loosening, out of place and data consistency error. In this project, communication has been provided with I2C, Modbus RTU and RS485 standarts by using Arduino Uno cards and MPU6050 IMU sensors in laboratory. Each used sensors are slave and the designed computer interface with C# is master. The fault situations in system are checked instant by designed interface. (it has assumed to mount IMU sensor and Arduino circuit on balise) it has been seen that the interface has responded to sensor movements instant and the system has worked in the end of the system tests.
vi
ÖNSÖZ
Bu çalışmada, demiryolu sinyalizasyon sektörüne mühendis olarak başladığım ve tecrübe kazanmamı sağlayan Elsitel Elektromekanik A.Ş.‟ye, halen çalıştığım Yapı Merkezi A.Ş.‟ye, maddi ve manevi destekleriyle yanımda olan aileme ve eşime, her fırsatta yardım istediğimde yardımlarını esirgemeyen Arş.Gör. Muhammet Üsame ÖZİÇ‟e, yardım ve desteği bulunan, bilgi ve tecrübesiyle yol gösteren değerli danışman hocalarım (önceki) Prof. Dr. Yüksel ÖZBAY‟a ve Doç. Dr. Seral ÖZŞEN‟e teşekkürü bir borç bilirim.
Veysel GÖKDEMİR KONYA-2017
vii ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii SĠMGELER VE KISALTMALAR ... ix 1. GĠRĠġ ... 1 1.1. Kaynak Araştırması ... 2 1.2. Tezin Amacı ... 14
2. DEMĠRYOLU SĠNYALĠZASYON SĠSTEMLERĠ ... 17
2.1. Giriş ... 17
2.2. Sinyalizasyon Sistemlerinin Tarihçesi ... 17
2.3. Sinyalizasyon Sistemlerinin Temel Öğeleri ... 18
2.3.1. Ray devreleri ... 19
2.3.2. Sinyaller ... 19
2.3.3. Makaslar ... 20
2.3.4. Tren haberleşme ekipmanları ... 21
2.3.5. Anklaşman ... 23
2.3.6. Merkezi trafik kontrolü (CTC) ... 23
2.3.7. Tren araç üstü (onbaord) ekipmanları ... 24
2.3.8 Arıza tipleri ... 25
3. ARIZA TAKĠBĠ YAPAN SĠSTEMĠN TASARIMI VE GERÇEKLEġTĠRĠLMESĠ ... 30
3.1. Arduino Uno ... 31
3.2. MPU-6050 IMU Sensör ... 31
3.2.1. Ham verileri okuma ... 35
3.3. I2C ... 33
3.4. RS485 Bus ... 34
3.5. Modbus ... 35
3.5.1. Modbus coil - register yapısı ... 35
3.5.2. Modbus mesaj iletimi... 36
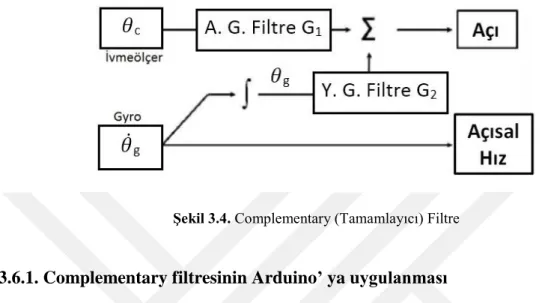
3.6. Complementary Filter (Tamamlayıcı Filtre) ... 37
viii
4. ARIZA TAKĠBĠ YAPAN SĠSTEMĠN ARAYÜZ TASARIMI ... 40
4.1. Visual C# ... 40
4.2. Arayüzün Çalışma Mantığı ... 41
4.3. Arayüzde Verilerin Grafiksel Gösterimi ... 43
4.4. Arayüzde Arıza Tespiti ... 44
4.4.1. Arıza durumu 1 ... 44
4.4.2. Arıza durumu 2 ... 47
4.4.3. Arıza durumu 3 ... 47
5. ARIZA TAKĠBĠ YAPAN SĠSTEMĠN TEST ĠġLEMLERĠ ... 49
5.1 IMU Sensör Test İşlemleri ... 51
5.1.1 Sabitlik testi ... 51
5.1.2 Tilt testi ... 53
5.1.3 Darbe Testi ... 56
5.2 Arayüz Test İşlemleri ... 57
6. SONUÇLAR VE ÖNERĠLER ... 74 6.1 Sonuçlar ... 74 6.2 Öneriler ... 75 KAYNAKLAR ... 76 EKLER ... 81 ÖZGEÇMĠġ ... 88
ix
SĠMGELER VE KISALTMALAR
ADC : Analog Digital Convertor ATP : Automatic Train Protection
ATPS : Automatic Train Protection Systems bit : binary digit
bps : bit per second
BRICS : Brazil, Russia, India, China and South Africa BUDT : Balise Up-link Data Transmission
BTM : Balise Transmission Module C : Controller
CBTC : Communications-Based Train Control
CENELEC : European Committee for Electrotechnical Standardization CNR : China Northern Locomotive and Rolling Stock
CPU : Central Processor Unit
CRC : Cylic Redundancy Check
CSR : China South Locomotive and Rolling Stock
DC : Direct Current
dk : dakika
DMI : Driver Machine Interface DP : Data Processing
Dref : Dönme referans değeri
EEPROM : Electronically Erasable Programmable Read-Only Memory EMI : Electromagnetic Interference / Immunity
ERTMS : European Rail Traffic Management System ETCS : European Train Control System
EVC : European Vital Computer FEM : Finite Element Method
FMVEA : Failure Modes, Vulnerabilities and Effects Analysis FSK : Frequncy Shift Keying
GA : Genetic Algorithm
GND : GROUND
GNSS : Global Navigation Satellite Systems GSM-R : Global System for Mobile-Railway
x HAZOP : Hazard and Operability HIP : Host Identity Protocol
Hip-HOPS : Hierarchically Performed Hazard Originand Propagation Studies I : Interrogator
ICSP : In-Circuit Serial Programming
IEC : International Electrotechnical Commission IMU : Inertial Measurement Unit
INT : Internal
I²C : Inter-Integrated Circuit IP : Internet Protocol
JRU : Juridical Recording Unit
KM : Kayma Mesafesi Kref : Kayma referans değeri LAN : Local Area Network lcd : liquid crystal display LEU : Lineside Elecronics Unit LSB : Least Significant Bit MAC : Media Access Control NFF : No Failure Found
PID : Public Information Display PLC : Programmable Logic Controller PWM : Pulse Width Modulation
RBC : Radio Block Center Ref.val : Referance value RMS : Root Mean Square Rx : Receiver
SCL : Serial Clock
SCADA : Supervisory Control and Data Acquisiton SD : Secure Digital
SDA : Serial Data Line
SDH : Synchronous Digital Hierarchy SRAM : Static Random Access Memory
TCDD : Türkiye Cumhuriyeti Devlet Demiryolları TCP/IP : Transmission Control Protocol/Internet Protocol
xi TIU : Train Interface Unit TLU : Train Location Unit TMS : Train Management System TTL : Transistor-Transistor Logic Tx : Transmitter
UBS : Universal Bank in Switzerland UPS : Uninterruptable Power Supply USB : Universal Serial Bus
UTİKAD : Uluslararası Taşımacılık ve Lojistik Hizmet Üretenleri Derneği VIN : Giriş voltajı
Vref : Referans voltajı
VzeroG : Sensörün sabit duruyorken verdiği değer W : Wayside transponder
YHD : Yüksek Hızlı Demiryolları
1. GĠRĠġ
Bu tez Selçuk Üniversitesi Elektrik Elektronik Mühendisliği Bölümünde, demiryolu sinyalizasyon sistemlerinde kullanılan balizlerin titreşim ve konum bilgilerinden arıza takip sistemi geliştirilmesi üzerine yapılan bir yüksek lisans çalışmasıdır.
Dünyada demiryolları endüstrisi büyük bir hızla yoluna devam etmektedir. Gelişmekte olan ülkelerin özellikle de BRICS ülkelerinin hammadde ihtiyaçları ekonominin tekerleklerinin dönmesini sağlarken, güçlü hammadde talebi ve buna bağlı olarak Asya ve Afrika‟da yeni madenlerin açılması yük taşıma amaçlı demiryolları inşasının artmasına neden olmuştur. Diğer yandan birçok ülkenin ekonomik bağlarını derinleştirmek için aralarındaki mesafeyi daraltmak istemesi, şehirlerarasında ulaşımı en kısa zamanda gerçekleştirme isteği ve ulaşım maliyetini azaltma çabası, hızlı tren projelerini desteklemektedir. Bugün dünyanın dört bir yanı demir ağlarla örülmeye ve birbirine bağlanmaya devam etmektedir (UTİKAD, 2013).
Dünyada demiryolu piyasası en canlı olan ülkeler World Watch raporuna göre Almanya, İspanya, Japonya ve Çin olarak sıralanmaktadır. Almanya dünyanın en büyük demiryolu ve ulaştırma pazarlarından biri olarak kabul edilmektedir. Ülke demiryolu üretim endüstrisinde teknoloji lideri konumundadır. Demiryolu sektörüyle ilgili toplam çalışan sayısı 580 bine yaklaşmaktadır. İspanya, Avrupa‟da en büyük yüksek hızlı tren demiryolu inşa programına sahiptir. Ülkenin Nisan 2010 Altyapı Planı 24 milyar dolarlık ulaştırma fonunun yüzde 70′ini demiryolu sektörüne ayırdı. Sektörde 116 bin kişi çalışıyor. Japonya, hızlı tren geliştirme konusunda küresel lider olmaya devam ediyor. Ülkede azalan nüfus yurt içi demiryolu talebini azaltırken, Japonya ihracat için dış pazarları izliyor. Japon tren üreticilerinin son 10 yılda gelirlerinin yüzde 38′ini ihracat oluşturdu. Sektörde 25 bin kişi çalışıyor. Çin şehirlerarası ray ağını 2020′ye kadar 150 bin km‟ye çıkarmayı hedefliyor. Bunun 25 bin 700 km‟si hızlı tren hattı olarak planlanıyor. Ülkenin en büyük iki demiryolu şirketi CSR (China South Locomotive and Rolling Stock) ve CNR (China Northern Locomotive and Rolling Stock) birlikte 200 bin kişiye istihdam sağlıyor (UTİKAD, 2013).
Günümüz demiryolu yatırımlarına baktığımızda UBS Grubu‟nun hesaplamasına göre, 2016-2020 arasında Çin‟in demiryolu yatırımları yıllık yaklaşık 850 milyar yuan (133,6 milyar dolar) olarak gerçekleşecek. İspanya Ulaştırma ve Bayındırlık Bakanlığı‟nın 2016 açıklamasına göre, İspanya ulaşım bütçesinin %54‟ünü demiryolu
projelerine ayıracak. Yüksek hızlı tren projeleri de demiryolu bütçesinin %67‟sini oluşturacak. Ayrıca demiryolu güvenliği açısından yeni yapılacak hızlı tren hatlarına ERTMS konuşlandırılması için 455 milyar Euro bütçe ayıracak. Bunun yanında diğer birçok ülke demiryolu yatırımlarını benzer şekilde arttırmaktadır.
Yüksek hızlı demiryolları (YHD), demiryolu ulaştırma türünün hizmet parametreleri ve altyapı standartlarının teknolojik gelişmeler paralelinde yükselmesiyle ortaya çıkmış bir türdür. Japonya, Fransa ve Almanya‟nın 40 yılı aşkın çalışmaları ve yatırımlarıyla gelişimini ortaya koymuş olan bu sektör, küresel düzeydeki ulaştırma politikaları paralelinde her geçen gün daha da ön plana çıkmaktadır (Kızıltaş, 2013).
Ülkemiz demiryolu hedeflerine baktığımızda TCDD 2016 açıklamasına göre 2023‟e kadar 3 bin 500 kilometre yüksek hızlı demir yolu, 8 bin 500 kilometre hızlı demir yolu ve 13 bin kilometre demir yolu yaparak toplam 25 bin kilometre demir yolu uzunluğuna ulaşılması planlanmıştır.
Yukarıda bahsedilen bilgiler ışığında artan demiryolu hatları ve tren trafikleri beraberinde yeni raylı sistemler, ERTMS/ETCS ve CBTC gibi güvenlik sistemleri ihtiyacını doğurmuştur. Ayrıca güvenlik standartlarına uymayı gerekli kılmıştır.
1.1. Kaynak AraĢtırması
Raylı Sistemlerde Emniyet Standartları ve Makas Otomasyon Sistemine Uygulanması; Demiryolu emniyet kriterleri, Avrupa Elektroteknik Standardizasyon Komitesi (CENELEC) ve International Electrotechnical Commission (IEC) standartlarında yeterli bir seviyeye gelmiş ve uygulamalarda bu standartlar kullanılmaya başlanmıştır. Bu standartların amacı, olabilecek tehlikeleri, kazaları risk analizleri ile tespit edip gerekli tedbirleri alarak uygulama aşamasında bu riskleri kabul edilebilir düzeye indirmektir. Yurdumuzda ve dünyada yaşanan demiryolu kazaları bu standartlara uymanın ne derece önemli olduğunun açık bir göstergesidir (Gülener, 2009).
Ülkemizde yapılan demiryolu çalışmaları genel olarak CENELEC‟ e bağlı olarak yapılmaktadır. Özellikle yeraltı metro sistemleri CENELEC standartlarına uygun olarak gerçeklenmiştir. Bu standartlar, EN 50126 (güvenilirlik özellik tanımları, bakım uygulamaları ve güvenlik), EN 50128 (haberleşme, sinyal taşıma ve işleme süreçleri, raylı sistem kontrolü için yazılım uygulamaları) ve EN 50129 (güvenli donanım bileşenleri) standartlarından oluşmaktadır (Yıldırım, 2012).
Raylı sistem teknolojilerinde başlangıç hedef kazaları önlemektir. Bu nedenle sinyalizasyon sistemleri geliştirilmiştir. Sinyalizasyon sistemlerinin ana teması demiryollarındaki emniyeti sağlamak aynı zamanda hat kapasitesini arttırmak ve personel istihdamını azaltmaktır (Gülener, 2009).
Morant (2014) çalışmasında demiryolu sinyalizasyon sistemlerinde bakım ve arıza onarım işlerinin daha verimli hale getirilmesi ve daha güvenli bir sinyalizasyon sistemi için İsveç demiryollarında bakım onarım çalışmalarına ait veriler incelenmiştir. Sinyalizasyon sisteminin birçok ekipmandan ve bu ekipmanların haberleşmesinden oluştuğu, sistemin herhangi bir yerinde meydana gelen bir arızanın domino etkisi yaparak diğer sistemleri de etkilediği belirtilmiş olup arıza ve bakım analizleri yapılmıştır. Luleå-Gällivare‟da İsveç demiryollarına ait 10 yıllık bakım çalışmaları verileri kullanılarak yapılan analizler sonucunda kayıtların %27‟si sinyalizasyonla ilgili, geriye kalan aktivitelerin hat bakımıyla ilgili olduğu saptanmıştır. Sinyalizasyon sistemlerindeki arızalar ve çalışmaların analizi sonucunda ise anklaşman, hemzemin geçit, ray devreleri ve sinyaller %80‟lik bir bölümü oluşturmuştur. Arıza kayıtlarında tanımlanamayan arızalar %26, çalışmayan %24 ve herhangi bir hata tespit edilemeyen (NFF) %21‟lik bir bölümü kapsamıştır.
Niculescu ve ark (2014) çalışmasında demiryollarında akıllı sistemler kullanıldığında bakım ve onarım çalışmalarının verimli hale geldiği ve enerji tasarrufunun %25 oranında sağlandığı analiz edilmiştir. Akıllı demiryolu sistemlerinin faydaları şu şekilde ifade edilmiştir:
- Güvenlik ve güvenli bilgi elde etme, - Hızlı trafiği yönetme,
- Olayları yönetme,
- Veritabanı ile bilgi akışı sağlama, bakım çalışmalarının kolaylaşması, - Riskleri azaltma,
Önemli akıllı demiryolu ekipmanlarından bazıları ise ray devreleri, ERTMS sistemi, balizler ve GSM-R‟dır. Ayrıca tren hareketini sağlayan enerji yönetim şekli de enerji tasarrufu açısından önemlidir.
Abed (2010) çalışmasında Avrupa Demiryolu Trafik Control Sistemi‟nin (ERTMS) önemi üzerinde durulmuştur. Sinyalizasyon sisteminin önemli bir parçası olan ERTMS trenler arasındaki mesafeyi korumakta olup yüksek hızlarda güvenli bir seyehat imkanı vermektedir. ERTMS‟de balizlerin görevi tren üzerinden geçerken trene sabit veya değişken telegram bilgisini iletmekdir. Lineside Electronic Unit (LEU) ise
sinyallerin durumunu baliz aracılığı ile trene iletir. Böylece tren hızlanma ve fren eğrisini belirlemekte ve duruma göre seyrine devam etmektedir. ERTMS dört adet uygulama seviyesine sahiptir(Seviye 0, seviye 1, seviye 2 ve seviye 3 ). Seviye 0‟da sinyalizasyon sinyaller, ray devreleri ve sabit balizlerle sağlanmaktadır. Seviye 1‟de sinyalizasyon kablolu balizler, LEU, ray devreleri ve sinyallerle sağlanmaktadır. Seviye 2‟de sinyalizasyon Radio Block Center (RBC), sabit balizler, ray devreleri ve GSM-R ile sağlanmaktadır. Seviye 3‟de ise sinyalizasyon sinyaller ve ray devrelerine ihtiyaç duyulmadan RBC, GSM-R ve balizlerle sağlanmaktadır.
Akgök (2009) çalışmasında raylı sistemlerde (tramvay, hafif metro ve metro) hızlı, dakik ve emniyetli bir ulaşımın sağlanmasının önemi, bu amaca bağlı olarak sinyalizasyon sistemleri geliştirildiği, sinyalizasyon sistemlerinin; demiryolu taşımacılığında, ulaşımın zamanında ve emniyetli bir şekilde sağlanması açısından en önemli unsurlardan biri olduğu, sinyalizasyon sistemlerinin temel amacının trenlerin birbirleriyle çarpışmalarını önlemesi gibi konular göz önünde bulundurularak Petri Ağları ile bir anklaşman tasarımı gerçeklenmiştir. Bu çalışmada demiryollarında artan kazaların sinyalizasyon sisteminin önemini açık bir şekilde gösterdiği vurgulanmıştır. Ayrıca sinyalizasyon sistemlerinin tasarımı ve uygulanması konusundaki projelerin ciddi destek bulduğu ve gerçeklenen sistemlerin uzun süre test edilerek uygulama sırasında oluşabilecek hataların ortadan kaldırıldığı, hata olduğunda ise sistemin en emniyetli duruma geçmesi sağlanarak tehlikeli durumların en aza indirgendiği belirtilmiştir. Böylece sinyalizasyon sisteminin sağladığı emniyetin, yolcuların karşılaşacağı riskleri normal hayatta karşılaşacağı riskler ile eşit seviyeye getirdiği ifade edilmiştir.
Gülener (2009) çalışmasında endüstriyel otomasyon sistemlerinin gerçeklenmesinde kullanılan programlanabilir kontrolör (PLC) ve bu tür sistemlerin izlenmesinde kullanılan SCADA yazılımlarından yararlanılarak bir sinyalizasyon sisteminin nasıl gerçekleneceği konusu incelenmiş ve bir uygulama gerçeklenmiştir. Bu çalışmada sinyalizasyon sistemlerinin birçok bileşenden oluştuğu ve bunların ray devreleri, makas sistemleri röleler ve sinyal lambaları olduğu belirtilmiştir. Bileşenler ayrıntılı olarak tanıtılmış ve incelenmiştir. Son olarak, Siemens PLC ve SCADA programları kullanılarak sinyalizasyon tasarımında göz önüne alınan belirli kurallara göre TCDD bağlı Afyon Şehir garı için bir sinyalizasyon sistemi tasarımı ve benzetimi yapılmıştır. Sinyal lambaları ve makas sistemlerinin kumandasına ilişkin „interlocking‟ işlemleri Siemens S7-300 CPU 315-2DP işlemcili PLC‟de gerçeklenmiştir. Tüm
sistemin izlenmesi ve anklaşman işleminin başarımının sınanması amacı ile tasarlanan SCADA sistemi ise Siemens WinCC SCADA programı kullanılarak oluşturulmuş ve sistemin çalışması izlenmiş ve başarımı değerlendirilmiştir. Sinyalizasyon sistemlerinde, Fail-Safe ve interlocking kavramları vazgeçilmez bir unsur olarak kabul edilerek, tasarlanacak sistemlerin “Fail-Safe “ tasarım kriterlerine uygun olarak yapılması gerekmektedir. Bu çalışmada genel kontrol birimi ve SCADA yazılımları kullanılarak bu işlemin kolayca yapılabilir ve uygulanabilir olduğu basit bir uygulama üzerinde gösterilmiştir.
Kızıltaş (2013) çalışmasında yüksek hızlı demiryollarının ortaya çıkışı, gelişim süreci ve ulusal, bölgesel, uluslar arası politikaları ortaya konmuştur. YHD Hatlarının standardizasyonu ve tanımı; altyapı, hizmet parametreleri ve farklı ölçütlerle ortaya konulmaya çalışılmıştır. Küresel boyuttaki sektörel eğilimler, teknolojik gelişimler ve politik kararların değerlendirilmesiyle, bunların ülkemize yansımaları ile bu çerçevede ortaya konan bir teknik değerlendirme dâhilinde öneriler sunulmuştur. Genel olarak 200 km/h hızında olan trenler hızlı tren standartlarında sayılırlar. Dünyada birçok ülke yüksek hızlı tren politikalarını sürekli gözden geçirmekte ve projeler geliştirmektedir. Bunun yanında ülkemizde de demiryolları hedefleri belirlenmiş ve hâlihazırda devam eden ve faaliyette olan yüksek hızlı tren hatları mevcuttur. Ülkemizdeki demiryolu işletmelerini geliştirmek üzerine bazı öneriler ve saptamalar verilmiştir. Bunlardan birkaçı şöyledir;
Gerek altyapı ve gerekse de araç teknolojileri için yerli üretime ağırlık verilmeli, bu konuda öncelikle devlet yatırımları olmalı, takibinde ise kamu-özel sektör ortaklıkları ve özel sektör teşviki olmalıdır.
Altyapı ve araç teknolojileri üretimi için Akademi-Özel Sektör-Kamu Entegrasyonu şarttır.
Dışarıdan alınması zorunlu gözüken “araç ve ekipmanlar” için ise tercih “en ileri teknoloji”den yana kullanılmalı, fakat bu da arz-talep dengesi ne göre derecelendirilmelidir.
Yüksek hızlı demiryolu yatırımları hem ülkesel hem de bölgesel entegrasyon adına hayatidir, dolayısıyla sınır aşan yatırımlar için ‟savaş sonrası-kriz sonrası‟ perspektifi geliştirilip, mutlaka ‟ortak bir bölgesel ağ‟ oluşturulmalıdır.
Yoğun yolculuk talebi olacak olan güzergâhlar ve yük taşımacılığının yoğunlaşacağı hatlarda, konvansiyonel hatların altyapısının iyileştirilmesi ile yüksek hızlı demiryolları ile birlikte işletim konusu düşünülebilir.
Sandidzadeh ve ark (2011) çalışmasında sinyalizasyonda önemli bir yere sahip olan tren navigasyon sisteminin iyileştirilmesi için baliz yerleşim optimizasyonu üzerinde durulmuştur. Metot olarak Genetik Algoritma (GA) ve Kalman Filtresi kullanılmıştır.
Otomatik tren kontrol sistemlerinin amacı güvenli ve kaliteli bir hizmet sunmaktır. Bu açıdan trenle demiryolu arasındaki veri alışverişinde büyük rol üstlenen balizlerin yerleşim yerlerinin optimizasyonu demiryolunda güven ve kaliteyi arttıracaktır. Optimizasyon için genellikle üç yöntem kullanılmaktadır.
Daha pahalı sensörler ve daha karışık algoritmalar kullanmak, Birçok sensörü birleştirerek sonuç elde eden algoritmalar kullanmak, Ve sensörlerden daha iyi verim alabilmek için özel yollar kullanmak. Bu çalışmada takometre hatalarını minimize etmek ve optimum baliz yerleşim yerinin tespit için Genetik Algoritma, baliz verilerini ve takometre verilerini birleştirmek için ise Kalman Filtresi kullanılmıştır. Uygulama için ilk başta balizler hat üzerine rastgele yerleştirilmiştir. Tahmini tren hızının RMS hataları karşılaştırılmıştır. Daha sonra GA balizlerin yerini tespit için kullanılmıştır. Bu metod ile elde edilen RMS hatası 1.0127 iken balizler düzgün aralıklarda yerleştirildiğinde elde edilen RMS hatası 3.04981 olmuştur. GA ile daha iyi sonuç elde edildiği görülmüştür.
Juliusdottir (2014) çalışmasında uçaklarda kullanılmak üzere ivme ölçer ve gyro sensör ölçümleri birleştirilmiştir. Sensör olarak altı eksenli MPU6050 kullanılmıştır. Data kontrolü için rasperry pi kullanılmış olup datalar SD karta kaydedilmiştir. IMU sensör öncelikle kalibre edilmiş, daha sonra sabitlik, dönme ve tilt testleri uygulanmıştır.
Sabitlik testinde sensör düz zemine sabitlenmiş ve yaklaşık 2 dakika boyunca değer alınmıştır. İvme ölçer‟e etkiyen gürültü değerinin yaklaşık ±0,02g olduğu görülmüştür. Gyro‟ya etkiyen gürültü değeri ise x ekseni için ±2°/s olarak, y ve z eksenleri için ±0,4°/s olarak ölçülmüştür. Tilt testinde sensör breadboard üzerine sabitlenmiş olup önce 90° x ekseni ve 90° y ekseni yönünde hareket ettirilmiştir. Dönme testinde sensör z ekseni etrafında döndürülmüş olup sensör tepkisi ölçülmüştür. Böylelikle IMU sensör kullanımı incelenmiştir.
Altın ve ark (2015) çalışmasında ataletsel ölçümlerin yeterliliği için ivmeölçer ve jiroskop datalarının birleşimi ile elde edilen bilgilerin kullanıldığı bir dijital filtre uygulaması geliştirmiştir. Filtre ivmeölçer ve jiroskopun çıkışına uygulanmıştır. Sonuç olarak uygulanan filtreler bu ölçüm birimlerinin kombinasyonu ile karar verme işlemini
gerçekleştirmiştir. Filtre çıkışında elde edilen datanın gürültü ve negatif etkilerden temizlendiği görülmüştür.
Zhao ve ark (2012) çalışmasında balizlerin üzerinden hızlı tren geçtiğinde veri alışveriş kalitesini arttırmak için sonlu elementler metodu analiz edilmiştir. Sinyalizasyonda trenlerle hat arasındaki veri alışverişini sağlayan balizlerin data alışverişi önemlidir. Hızlı trenlerin hızları arttığı için veri alışveriş kalitesi daha da önemli olmaktadır. Bu noktada BUDT (Balise Up-link Data Transmission) üzerine FEM (Finite Element Method) matematiksel hesaplama metodu uygulanmış ve geçerli sonuçlar elde edilmiştir. Bu çalışma sonraki araştırmalara katkı açısından önemlidir.
Zhao ve ark (2013) çalışmasında baliz ve BTM (Balise Transmission Module) arasındaki veri alışverişinin kalitesini arttırmak için 2012‟deki çalışmaya ek olarak baliz anteninin yaymış olduğu manyetik akı yoğunluğu ve tren geçişlerinde baliz gerilim genliği incelenmiştir. BTM modülü optimizasyon için uzunlamasına ve çapraz olarak monte edilmiştir. Data alışverişi işlemlerinde BTM modülü çaprazken; tren hızı 470 km/h, BTM modülü uzunlamasına iken tren hızı 523 km/h olarak ölçülmüştür. Aynı data paketinin BTM modülü farklı monte edildiğinde daha büyük hızlarda trene iletildiği görülmüştür. Analiz sonuçlarında BTM açısının data alışverişinde etkili olduğu gözlemlenmiştir.
Hatsukade ve ark (2014) çalışmasında trenlerle hat üzerindeki sinyalizasyon ekipmanları arasında meydana gelen elektromanyetik girişimin hesaplanması için bir model geliştirilmiştir. Bu hesaplama modeli hareket dönüştürücülerin motor kabloları ile balizlerin anten sargıları arasındaki manyetik indüksiyonu kullanmaktadır. Genel olarak üç çeşit girişim tipi vardır. Bunlar pantograf arkından meydana gelen, katener geri dönüş ve hareket motorlarının kabloları ile balizler arasındaki girişimlerdir. Sinyal ekipmanlarının üretimi açısından bu girişim hesaplama modeli büyük önem arz etmektedir.
Sasaki ve ark çalışmasında sinyalizasyon sisteminde farklı bir tren algılama modeli uygulanmıştır. Bu uygulama Japonya‟da test edilmiştir. Tren algılama sistemi I (Interrogator), W (Wayside transponder), C (Controller) ve Onboard responder ekipmanlarından oluşmaktadır. W modülleriyle hat bloklara bölünmüştür. I modülü ile W modülü tren yokken mikrodalga ile haberleşmekte ve tren aralarından geçtiğinde, I modülü onboard algılayıcısı ile haberleşmekte olup treni algılamaktadır. Bu çalışma, frekans ile çalışan ray devrelerine göre farklı bir sistem olmuş ve testlerde başarı sağlanmıştır. Ayrıca güvenlik testlerinde de bu sistem yüksek performans sağlamıştır.
Morant ve ark çalışmasında sinyalizasyon sisteminin demiryolu trafiğini kontrol ve yönetme açısından çok önemli olduğu üzerinde durulmuş olup bu sistemlerin bakım, önceden arıza tespiti ve güvenlik ile ilgili konularda kalitesinin arttırılması hedeflenmiştir. Bu bakımdan demiryolu sinyalizasyonunda kullanılan tüm ara sistemlerin bilgilerinin toplandığı ve işlendiği bir data merkezi modeli düşünülmüştür. Bu modelde tüm sistemlerin bilgileri toplanmış olup (bakım çalışmaları, arızalar, sinyal durumları gibi) bu veriler sistemin kararlığı için kullanılmıştır.
Camargo Jr. ve ark çalışmasında CBTC- Communication Based Train Control sinyalizasyon sisteminin risk analizi gerçeklenmiştir. Risk analizinde sinyalizasyon ekipmanlarından olan balizler, radyo haberleşme ağı, CBTC hat üzerindeki ekipmanlar ve CBTC tren anteni gibi öğeler incelenmiştir. Bu öğeler üzerinde bir tehlike operasyon tekniği HAZOP- Hazard and Operability uygulanmıştır. Bu tekniğin amacı çalışan sistemde ne gibi tehlikeler oluşabilir, ne gibi önlemler alınabilir ve bunlarla ilgili dökümantasyon geliştirmek gibi durumlar üzerinde yoğunlaşmaktır. Yapılan çalışmada oluşabilecek riskler analiz edilmiş ve bazı yorumlar elde edilmiştir. Bu yorumlar neticesinde oluşabilecek tehlikelere karşı önceden müdahale hedeflenmiştir.
Kunifuji ve ark (2008) çalışmasında normal sinyalizasyon sistemlerinde çok fazla kablo kullanıldığı ve bu yüzden insan kaynaklı hataların arttığı belirtilmiştir. Bu bakımdan sinyalizasyon sistemindeki kablo kullanımını ve insan kaynaklı hataları azaltmak için optik haberleşme ve lojik kontrol tekniği geliştirilmiştir. Normalde sinyal ekipmanlarının bağlantısında sinyalden çıkan herbir kablo ayrı ayrı uzak teknik binaya ulaşır. Bu sistemde sinyal ekipmanları optik olarak tasarlanmış olup sinyal çıkışı sadece tek bir optik ağa bağlanmış ve teknik binaya ulaştırılmıştır. Optik sistemde lojik kontrol ve IP kontrol teknikleri kullanılmıştır. Bu sistem için sinyalizasyon ekipmanları optik haberleşmeyi destekleyecek şekilde üretilmelidir. Gelecekte kullanılacak olan sistemlere farklı bir bakış açısı kazandırması açısından bu çalışma güzel bir örnek olmuştur.
Tarnai ve ark (2000) çalışmasında ülkeler arası geçerli bir demiryolu ağı oluşturmak için tren kontrol sistemlerinin büyük rol üstlendiği irdelenmiştir. ETCS (European Train Control System) sisteminin faydaları anlatılmıştır. Ayrıca bu sistemin ekonomik, iş ve teknik anlamda ne gibi getirileri olduğu analiz edilmiştir. Hızla gelişen sinyalizasyon sistemleri beraberinde ortak bir sistemi gerekli kılmıştır. Bir ülkeden diğerine geçişte trenlerin sistemsel olarak problem yaşamaması için sinyalizasyon sistemleri standart ve ortak hale getirilmiştir. Bu sistem ETCS ile birlikte ERTMS
(European Rail Traffic Management System) adını almıştır. Çalışmada Macaristan‟da 1993 yılında ETCS seviye 1 uygulandığı, bu uygulamanın Budapeşte-Viyana arasında bir pilot uygulama olduğu belirtilmiştir. Pilot uygulama testlerinde güvenirlik ve doğru çalışma açısından geçerli sonuçlar elde edilmiştir.
Flammini (2013) çalışmasında otomatik tren koruma ve bilgisayar tabanlı anklaşman sistemlerinden bahsedilmiştir. ATPS (Automatic Train Protection Systems) sistemi ERTMS (European Rail Traffic Management System), Anklaşman ve GSM-R (Globile System Mobile-Railway) alt sistemlerinden oluşur. Bu sistemler birlikte çalışarak trenin hız ve fren eğrilerini belirlemektedir. Böylece tren trafiği sağlanmış olmaktadır. Bilgisayar tabanlı anklaşman sisteminde tüm riskler göz önünde bulundurulup karmaşık hesaplar kolay bir şekilde yapılıp hız profilleri elde edilir. ERTMS seviye geçişlerinde bazı sistemler arka planda kalmaya başlar. Örneğin seviye 1‟den seviye2‟ye geçişte pasif olan GSM-R aktif olup sinyaller pasif olmaya başlar. Sistem önceden balizden aldığı bilgiyi RBC (Radio Block Center) birimlerinden almaya başlar. Tüm bu sistemlerde risk analizi ve güvenlik son derece önemlidir.
Bloomfield ve ark (2012) çalışmasında European Rail Traffic Management System ile ilgili sistemin ne kadar güvenli olduğu ve nasıl işlediği konuları analiz edilmiştir. ERTMS sistemi mühendisler tarafından demiryollarında tren çarpışmalarını engellemek, trafik akışını düzenlemek amacıyla geliştirilmiş bir sistemdir. Bu sistemlerde kaza olma riski en aza indirgenmiştir. ERTMS sistemi birçok alt sistemden oluşur. Bu alt sistemlere uzaktan erişip saldırı yapmak gibi riskler de olabilecek riskler arasındadır. Bu tür sistemler giderek yaygınlaşmaktadır. Bu noktada tasarlanan sistemler bazı kötü senaryolarla test edilir böylece güvenlik kalitesi arttırılmaya çalışılır. Albrecht ve ark (2013) çalışmasında trenlerin konumlarını takip etmek Almanya uluslararası PiLoNav araştırma projesi kapsamında bir çalışma gerçekleştirilmiştir. Normal sistemlerde tren konumunu algılamak için demiryolu üzerine baliz, ray devresi gibi ek ekipmanlar yerleştirilir. Bu durumda ekipman bakım ihtiyacı ve maliyet açısından bir dezavantaj oluşmaktadır. Bu çalışmada ek ekipman ihtiyacı olmadan uydu sinyaliyle tren konumu saptanmaya çalışılmıştır. Projede Global Navigation Satellite Systems (GNSS) ile birlikte Train Location Unit (TLU)sistemleri kullanılmıştır. Ayrıca onboard üzerindeki sensörlerden de faydalanılmıştır. Bu proje uydu sinyallerini kullandığı için tünellerde, dar vadilerde sinyal kaybını engellemek veya trenlerin konumunu kaybetmemek için ek sensörlerden faydalanılabilir.
Lundberg (2002) çalışmasında baliz veri alışveriş sistemini anlatmış ve önemli noktaları vurgulamıştır. Baliz transmisyon sistemi baliz ve onboard transmisyon ekipmanlarından oluşmaktadır. Balizler kablolu ve kablosuz olmak üzere iki çeşittir. Onboard transmisyon sistemi anten birimi ve BTM (Balise Transmission Modul) fonksiyonundan oluşur. Ayrıca diğer sinyalizasyon sistemleri Lineside Electronic Unit (LEU) ve sinyallerden oluşur. Baliz sisteminin tüm sistemlerde kullanılabilmesi hedeflenmiştir. Transmisyon sistemi dört temel fonksiyondan oluşmaktadır. Bunlar; baliz tespiti, tren ekipmanlarına korunmuş datanın iletilmesi, tren konumu için datanın elde edilmesi ve trenin hareket yönünün belirlenmesidir. Baliz transmisyon sisteminde Frequency Shift Keying (FSK) modülasyonu kullanılmaktadır. Up-link sinyalde (balizden trene veri ileten sinyal) lojik sıfır için 3.9 MHz, lojik 1 için 4.5 MHz kullanılır. Ortalama data Oranı 565 kbit/s‟dir.
Poré (2003) çalışmasında sinyalizasyon sistemlerinin arttığı ve artan bu sistemlerin beraberinde farklılıklar doğurduğu anlatılmıştır. Çünkü çoğu ülke farklı bir sinyalizasyon sistemi kullanmaktadır. Bu noktada ülkeler arası tren bağlantılarında farklı sistemlerin çakışması söz konusudur. Bu durumu ortadan kaldırmak için ERTMS sistemi geliştirilmiş ve tüm trenlerin onboard ekipmanları standart hale getirilmeye çalışılmıştır. Böylece bir ülkeden diğerine aynı trenle seyehat etmek mümkün olmaktadır. ERTMS sisteminin faydaları; ortak çalışabilirlik, daha az onboard ekipmanı, açık pazar, güvenlik, kapasite ve kullanılabilirliktir.
Morant ve ark çalışmasında sinyalizasyon sistemleri bakımlarının ve sistem yönetiminin verimli hale getirilmesi için özellikle İsveç Ulaşım Bakanlığı demiryolu verileri kapsamında bir çalışma yapılmıştır. Sinyalizasyon sistemleri hızla gelişmekte olup kompleks bir hal almaktadır. Bu noktada bakım ve yönetim işleri daha da zorlaşmaktadır. Bakım ve sistem yönetim işlerinin verimli olması çok önemlidir. Yapılan çalışmada sinyalizasyon işi yapan firmalar ve kişiler arasında bilgi ve tecrübe paylaşımının, teknik bilgi ediniminin ve firmaların araştırma çalışmalarına önem vermesinin sinyalizasyon açısından önemli olduğu vurgulanmıştır.
Morant ve ark (2012) çalışmasında İsveç demiryolları sisteminin Electromagnetic Interference (EMI) açısından uyumluluğu ve EMI‟ye sebep olan unsurlar araştırılmıştır. Demiryollarında farklı hızlarda ve ağırlıklarda trenler kullanılmaktadır. Bu trenlerin motor güçleri ve çekilen akımlar farklı olduğundan farklı EMI‟ye sebep olmaktadırlar. Gerilim altında hareket eden hızlı trenlerin üst yüzeyleri, hat üzerinde kullanılan elektronik devreler, hat kenarında bulunan trafo merkezleri ve
GSM-R istasyonları elektromanyetik girişimlere ve gürültüye sebep olmaktadır. Tüm bu istenmeyen girişimler ve gürültüler elektronik sistemleri etkilemektedir. Bu da sistemin işleyişini etkilemektedir. Bu doğrultuda demiryollarında kullanılacak olan sistemlerin EMI uyumluğu mutlaka kontrol ve test edilmelidir. EMI standartlarına uyumlu olan malzeme ve ekipman tercih edilmelidir.
Soderi ve ark (2016) çalışmasında Communication Based Train Control (CBTC) ve European Rail Traffic Management Systems (ERTMS) sistemlerinde olası siber saldırılar analiz edilmiştir. İlk olarak intra-vehicular Wi-Fi haberleşmesinden bahsedilmiştir. CENELEC, Wi-Fi haberleşmesini açık haberleşme olarak sınıflamaktadır ve Wi-Fi haberleşmelerinde sistem güvenliği için Host Identity Protocol (HIP) uygulanmasını istemiştir. Çünkü HIP uçtan uca bir güvenlik sağlamakta olup açıkları kapatmaktadır. İkinci olarak Balise Transmission Modul (BTM) için analizler yapılmıştır. Olası bir jammer saldırısında trenin fren yaptığı, riskin yüksek olduğu, böyle bir saldırının mümkün olduğu ve önlem için gerçek zamanlı girişim tespitinin yapılması gerektiği tespit edilmiştir.
Tazaki ve ark (2013) çalışmasında Hitachi firmasının 2011‟de Çin‟de tek raylı demiryolunda ilk olarak kuruduğu Communication Based Train Control (CBTC) sinyalizasyon sisteminden bahsedilmiştir. Tüm hatta radyo haberleşmesine dayalı hareketli blok sistemi kullanılmıştır. Hat uzunluğu 55,6 ve aktif kullanılan hat uzunluğu 39,1 km‟dir. Trenler arasındaki blok mesafesi 120 saniye olarak ayarlanmıştır. Çalışma hızı 75 km/h, istasyon sayısı 29 ve radyo frekansı 2,4 GHz‟dir. Ayrıca hatta Automatic Train Protection (ATP) kullanılmaktadır. Herhangi bir arıza durumunda CBTC sistemi tren pozisyonunu tespit etmek için backup sistemine sahiptir. Bu backup sistemi tren pozisyonu tespiti için aks sensörleri kullanmaktadır. CBTC sisteminde güvenlik olarak IEEE 1474 standartları dikkate alınmıştır.
Kunifuji çalışmasında JR East Group tarafından geliştirilen haberleşme tabanlı sinyalizasyon sisteminden bahsedilmiştir. Normal bir sinyalizasyon sisteminde her ekipmanın bağlantısında çok fazla kablo kullanılır. Bu sistemde anklaşman, sinyaller, makaslar ve diğer saha ekipmanları optik ağ ile haberleştiği için daha az kablo kullanılmıştır. Bu durumda hattın bakımı ve arızaya müdahale daha da kolay hale gelmiştir. Ayrıca sistemde normalden daha az lojik kontrolörler kullanıldığından sistem karışık olmaktan uzaklaşmış daha kolay hale gelmiştir. Bu sistemin teknik olarak geliştirilmesi 2004 yılında başlamıştır. Bu gibi yenilikçi sinyalizasyon sistemleri demiryolu taşımacılık kontrolünü ve yönetimini kolay ve modern hale getirmektedir.
Smith ve ark (2016) çalışmasında demiryolu sinyalizasyonunda ERTMS sisteminin insan performansına etkisi incelenmiştir. Demiryolları sistemlerinde güvenlikle ilgili iç ve dış etkenler vardır. Bunlar demiryolu trafik kuralları, altyapı, insan etkileri gibi faktörlerdir. ERTMS sisteminin etkileri GSM-R ile beraber incelenmiştir. GSM-R kullanmadan önce ve GSM-R kullandıktan sonra olmak üzere 74 adet kaza incelenmiştir. GSM-R olan sistemlerin haberleşmede meydana gelebilecek olan kesintiler veya arızalar azaltıldıkça insanlara etkisinin daha da pozitif olduğu görülmüştür. Ayrıca sinyalizasyon sistemleri tamamlandıktan sonra personelin sistemle ve bakım çalışmalarıyla ilgili olarak teknik eğitim almasının bir gereklilik olduğu tepit edilmiştir.
Zimmermann ve ark (2003) çalışmasında European Train Control System (ETCS) sisteminin gelecekte radio haberleşmesine ve yaygın olarak kullanılan ray devrelerine bağlı olduğu belirtilmiştir. Tren üzerindeki data alışverişlerinin güvenlik
açısından çok önemli olduğu vurgulanmış olup haberleşmedeki kayıpları modellemek ve incelemek için Petri net ile bir model analiz edilmiştir. ETCS sisteminde
haberleşme GSM-R ile sağlanır. Tren ile GSM-R kuleleri arasında transmisyon hataları, haberleşme kayıpları meydana gelmektedir. Bu noktada meydana gelen hatalar ve hataların giderilmesi Petri net ile modellenmiştir. Yapılan analizlerde olası kötü bir haberleşme arızasında istenmeyen sonuçların oluşabileceği ve bu gibi modellerin gelecekteki ETCS sistemleri için ekonomik ve güvenlik açısından kritik olduğu vurgulanmıştır.
Bekele (2015 çalışmasında demiryolu sinyalizasyonu sistemlerinde optimizasyonu sağlamak ve hataları azaltmak için hata analiz metodu uygulanmıştır. Bu metotta tüm dinamik sistem, potansiyel hata modları, hata yayılımı ve tahmini incelenmiştir. Hata yayılımı analizi Addis Ababa hafif raylı ulaşım için yapılmıştır. Analiz için Matlab-Simulink kullanılmıştır. Ayrıca Hierarchically Performed Hazard Origin and Propagation Studies (HiP-HOPS) sinyalizasyon ekipmanlarında meydana gelen yerel hataları tanımlamak için kullanılmış olup hata analizleri Simulink ile yapılmıştır. Yapılan analizlerde sinyalizasyon sistemleri kurulmadan önce hata analizlerinin yapılması gerektiği vurgulanmıştır. Analizler bir takım datanın yokluğu yüzünden verimli olmasa da tahmini data ile işlemler gerçekleştirilmiştir.
Zhao (2013) çalışmasında modern demiryolu tasarımlarında enerji kullanımını azaltmak ve optimize etmek için farklı kontrol sistemleri kullanılmıştır. Tren trajektörlerinin optimize edilmesi, çalışma öncelikleri ve kontrol sistemleri bir araya
geldiğinde enerji tüketiminin azaltacak bir çözüm meydana gelmiştir. Farklı tren sistemlerinin testi için bir çoklu tren simülatörünün geliştirilmesi düşünülmüştür. Tren trajektör optimizasyonu için Genetik Algoritma, Karınca Kolonisi Optimizasyonu ve Brute Force araştırma metodu kullanılmıştır. Ana hat testlerinde iki adet trenin çalışması gerektiği öngörülmüştür. Brute Force metodu trenin en uygun hedef hızını tanımlamak için geliştirilmiştir. Bu gibi metotlar uygulanarak modern demiryollarında enerji kullanımı azaltılmaya ve kontrol sistemleri optimize edilmeye çalışılmıştır.
Kumar (2013) çalışmasında farklı demiryolu istasyonları arasındaki tren trafiğinin güvenli ve kolay bir şekilde yönetilebilmesi için optik haberleşme ve sensör teknolojisi kullanılarak tren pozisyonu tespit edilmiştir. Demiryolu üzerindeki optik sensör tren üzerinden geçtiğinde mikrodenetleyiciye bilgi göndermekte, mikrodenetleyici gelen datayı lcd ekrana aktarmakta ve demiryolu trafik kontrolörleri tarafından ekranda tren konumu izlenmektedir. Bu çalışma ile tren trafik akış ve denetiminin kolay bir şekilde sağlanması amaçlanmıştır.
Bajpai ve ark (2007) çalışmasında Hindistan Demiryolları tarafından yürütülen farklı sinyalizasyon ve anklaşman yönleri verilmeye çalışılmıştır. Sistematik bir çalışma için teori, prosedür ve teknik bir araya getirilerek trafik kontrol denetimi güvenli hale getirlemeye çalışılmıştır. Ayrıca sinyalizasyonun tarihçesi anlatılmaya çalışılmıştır. İyi bir tren kontrolü için Traffic Management System (TMS) gereklidir. Çünkü sinyalizasyon olmadan trenin bir istasyondan diğerine geçişlerinde tren online olarak izlenemediği için sürekli bir telefon trafiği, bilgi trafiği yaşanmakta bu da hem zaman kaybı hem de güvenlik açısından bir eksiklik meydana getirmektedir. Çalışmada ayrıca mikrodenetleyicili bir uygulama yapılmıştır. Uygulama adımları şu şekildedir: Sahadan gelen sinyal, ray devresi ve makas tetiklemeleri röleler aracılığıyla mikrodenetleyiciye iletilmekte, mikrodenetleyici led sürücüyle ledleri sürmekte ve panele görüntü aktarılmaktadır.
Kiruthiga ve ark (2014) çalışmasında hemzemin geçitlerinde meydana gelen kazaları önlemek amacıyla mikrodenetleyici ve zigbee ile bir uygulama gerçekleştirilmiştir. Hemzemin geçitlerindeki kazalar trenlerin çarpışması veya trenin insan ve araca çarpması şeklinde meydana gelir. Hemzemin geçit sensör ve otomatik kapanma mekaniği ile donatılmış, haberleşmesi zigbee ile sağlanmıştır. Ayrıca tren üzerinde de zigbee haberleşmesini destekleyen modül bulunmaktadır. Böylelikle trenler hemzemin geçite veya birbirlerinde yaklaştıklarında sensörden gelen bilgiler tren ve
hemzemin geçit modülleri arasında aktarılmaktadır. Gelen bilgiye göre hemzemin geçit kapatılmakta veya açılmakta, trenler durmakta veya hareket etmektedir.
Kanso ve ark (2009) çalışmasında merdiven diyagramı ile yazılan demiryolu anklaşman sistemi için sinyalizasyon prensiblerinin kabul ve onay stratejileri üzerinde durulmuştur. Uygulama dört adımda gerçekleşmektedir. 1- Anklaşman sisteminin matematik modelini oluşturmak ve merdiven diyagramından bu modele aktarmak. 2- Güvenlik durumlarını düzelten kabul ve onay durumlarını geliştirmek. 3- Güvenlik durumlarını geliştirmek. 4- Demiryolu sahasının topolojik modelini kullanarak sinyalizasyon güvenlik şartlarını üretmek. Bu çalışmada anklaşman sistemi için matematiksel bir model geliştirilmeye çalışılmış olup bu model yaklaşımı ile anklaşman sistemlerinin kabul ve onay durumları kolay ve basit hale getirilmiştir.
Chen ve ark çalışmasında kentsel demiryolu sistemlerinde siber güvenlik üzerinde durulmuştur. Communications-Based Train Control (CBTC) sistemi ve mobil veri iletim uygulaması üzerinde siber çalışma yapılmıştır. CBTC sistemindeki siber risklere baktığımızda sinyaller, ray devreleri, balizler ve teknik binalar birbirleriyle haberleşmektedir. Trenlerin sinyal ekipmanlarıyla iletişimi GSM-R radyo sinyalleriyle sağlanmaktadır. Haberleşme noktasında olası bir siber saldırı sistemi etkileyecektir. Mobil veri iletişim uygulamalarındaki risklere bakıldığında trafik merkezi tarafından yolculara tren kalkış ve varış süreleri bilgi ekranlarından iletilmektedir. Olası bir public information display (PID) saldırısında ortaya bilgi kaybı ve yanlış yönlendirme çıkmış olacaktır. Bu da istenmeyen bir durumdur. Risk analizi için the Failure Modes, Vulnerabilities and Effects Analysis (FMVEA) ve attack trees metotları kullanılmıştır.
1.2. Tezin Amacı
Bu çalışmada üzerinde durulan sinyalizasyon sistemleri ekipmanlarından olan balizlerin görevi, teknik binalardan ve LEU (Lineside Electronics Unit) ‟lardan gelen verileri (hız, yol, tünel, eğim ve geçici hız kısıtlamaları gibi telegramları) trene iletmek veya üzerinde mevcut bulunan hatla ilgili sabit telegramları trene aktarıp trenin bu verilere göre hızlanma ve fren grafik eğrilerini belirlemesini sağlamaktır.
Bu çalışma ile yüksek hızlı trenlerin raylarda meydana getirdiği titreşimlerden etkilenen saha ekipmanlarından olan balizlerin sabitlendiği yerde gevşeme, tren çarpması, yerinden çıkma, girdaptan dolayı uçma, trenin balizi okuyamayıp veri bağdaşım hatası vermesi gibi durumları anlık takip edebilmek amacıyla balizlerin
titreşim ve konum bilgileri elde edilmeye çalışılmıştır. Böylelikle bakım onarım çalışmalarının verimlileştirilmesi, trenlerin tehirsiz seyir etmeleri, arıza yerinin önceden tespit edilmesi ve arızaya hızlı bir şekilde müdahale amaçlanmıştır.
Ankara-Konya yüksek hızlı tren hattı sinyalizasyon işlerini yürüten Yapı Merkezi firması tarafından 2011-2016 yılları arasında tutulan arıza kayıtlarına göre tek bir balizden kaynaklanan tehir süresi en az 2 dk‟dır. Arızalı balize müdahale geciktiğinde tehir süresi tren trafiğine bağlı olarak giderek artmaktadır. Demiryolu hatlarında artan bu tehir süreleri yüksek hızlı treni tercih eden yolcular ve sinyalizasyonun amacı açısından istenmeyen bir durumdur. Olası bir baliz arızasında CTC kumanda merkezinde bulunan dispeçerler arızalı balizi ve balizin bulunduğu kilometreyi tam bilmemekle beraber arızayı bakım ekiplerine bildirmektedir. Bu durumda ya bakım ekipleri tahmini söylenilen kilometreye gidip arızaya müdahale etmeye çalışmakta (eğer arıza baliz kaynaklıysa) ya da tren araç üstü ekipman bakımcıları arıza veren treni bekleyip JRU kayıtlarını incelemektedir. Her iki durumda arıza onarım süresi artmaktadır. Eğer arıza balizden kaynaklı değilse saha tarafına müdahale eden bakım ekibi fazladan yakıt harcamış olacaktır. Bu gibi durumların çokluğu ve tren hattının uzunluğu düşünüldüğünde yakıt maliyeti ciddi bir şekilde artmış olacaktır. Hava şartları açısından bakıldığında özellikle kış aylarında uzak kilometredeki bu tip arızalar bakım personelini zor durumda bırakmaktadır. Arızanın net bir şekilde teşhisi bu açıdan çok önemlidir. Ayrıca balizin üzerinden tren geçmeden yani tren balizden telegramı okumadan arıza olup olmadığı tespit edilememektedir. Bu durumda arıza önceden tespit edilememekte ve arıza müdahale-giderim süresi artmaktadır.
Yukarıda bahsedilen ve dünyada kullanılan sinyalizasyon sistemlerinde de meydana gelebilecek olası durumlar, literatür taramasında vurgulanan demiryolu sinyalizasyonunun hızlı ve güvenilir seyahat açısından önemi, balizlerin anlık olarak titreşim ve konum bilgilerini elde ederek bakım ve arıza çalışmalarına katkıda bulunmayı amaçlayan bu çalışmayı destekler durumdadır.
Çalışma için Arduino Uno, MPU6050 IMU sensörler ve RS485-TTL modülleri kullanılmıştır. IMU sensörden gelen veriler I2C protokolü ile Arduino tarafından okunmuş olup Modbus RTU ve RS485 haberleşme standartıyla bilgisayar arayüzüne iletilip yorumlanmıştır. Hızlı tren hattı üzerindeki her bir baliz için bir Arduino ve IMU sensör birlikte slave olarak düşünülmüş olup uzak bilgisayar arayüzü ise Modbus RTU master olarak düşünülmüştür.
İlerleyen bölümlerde demiryolu sinyalizasyon sistemlerinin tarihçesi, demiryolu sinyalizasyon sistemlerinin temel öğeleri, baliz arıza takip sisteminin tasarımı, arayüz tasarımı ve test işlemleri ele alınacaktır.
2. DEMĠRYOLU SĠNYALĠZASYON SĠSTEMLERĠ
2.1. GiriĢ
Büyük kentlerde trafik ve ulaşım problemlerinin çözümü için birçok ülkede raylı sistemlere önem verilmiş ve problem hafifletilmiştir. Ülkemizde raylı sistemler 90‟lı yıllara kadar az gelişmiş olsa da günümüzde raylı sistemler toplu taşımada büyük öneme sahiptir. Büyük şehirlerimizde karayolu taşımacılığında yaşanan trafik sıkışıklığının hafifletilmesi için raylı toplu taşıma sistemlerine yapılan yatırımlar giderek artmaktadır (Söyler ve Açıkbaş, 2005).
Bu bölümde ilk olarak sinyalizasyon sistemlerinin tarihi gelişimi verilecek, daha sonra sinyalizasyon sistemlerini oluşturan temel sinyalizasyon öğeleri kısaca tanıtılacaktır.
2.2. Sinyalizasyon Sistemlerinin Tarihçesi
Demiryolu ilk gelişmeye başladığı yıllarda sadece hızlı bir ulaşım aracı olarak kabul edilmiştir. Hem hat ve kavşak sayısı az hem de tren katarları az sayıda araçlardan oluşmakta idi. Ayrıca o dönemlerde trenlerin hızının çok düşük olması kontrolü kolaylaştırmıştır. Bu nedenle kaza veya çarpışmalar için herhangi bir önlem almak gereksiz görülmüştür. Yolculuk boyunca yolun açık olduğu ve önde tren olmadığı varsayılmıştır. Ancak bir süre yaşanan kazalardan ve problemlerden dolayı bazı çözüm arayışlarına gidilmiştir. İlk olarak hat üzerine el veya bayrakla işaret veren işaretçi görevliler konulmaya ve bu şekilde tren işletmeleri yapılmaya çalışılmıştır. Fakat tren hız ve ağırlıklarının ve aynı zamanda trenlerin bağlandığı vagon sayılarının artması, makinistlerin görüş mesafesi içinde trenleri durdurmaları veya emniyetli şekilde ilerletmeleri problem olmaya başlamıştır. Bu da tehlikeli bölgelerden önce işaretlerin tekrar edilmesi ihtiyacını doğurmuştur. Öte yandan işaretlerin uzaklardan görülememesi tren hareketlerini sınırlandırmış ve daha fazla işaretçi ihtiyacını beraberinde getirmiştir (Söyler ve Açıkbaş, 2005;Megep, 2011).
1840‟lı yıllarda zaman aralığı yöntemi uygulanmaya başlanmıştır. Buna göre trenler için belli aralıklar tespit edilmiş ve bu sürelerde karşılaşma noktalarına varmaları emri verilmiştir. Fakat trenlerin aksi veya aynı istikamette yol alan diğer trenlerden haberi olmaması bu yöntemi yetersiz kılmıştır. Bu eksiklik düşünülerek zaman aralık
yöntemi yerini mesafe aralık yöntemine bırakmıştır. Bu yöntemde demiryolu hattı kısımlara bölünmüş yani bloklar oluşturulmuş ve her bloğun başına bir işaret konmuştur. Bu işaretler aracılığıyla makinistler girmekte oldukları blokların işgal edilmiş olup olmadığını anlayabilmişlerdir (Söyler ve Açıkbaş, 2005).
Mesafe aralık yönteminin uygulanması sabit hat sinyalleri fikrini ortaya çıkarmıştır. Telgrafın keşfi ile beraber zil ve telgraf birlikte kullanılmış ve sinyal operatörleri bir sonraki istasyona blokların durumunu bildirerek trenlerin hareketlerini yönlendirmişlerdir. Bir önceki sinyal operatörü bir sonraki istasyondan izin istiyor ve memur devreye yol verdikten sonra izni veren memur kendi istasyonundaki sinyal devresini çalıştırabiliyordu (Söyler ve Açıkbaş, 2005).
Trenler arasını belirli miktarlarda mesafelendirmek düşüncesi ile uygulanan sinyal sistemi 1900‟lu yıllarda, kontrol operatörleri tarafından elle çalıştırılan blok sistemi, kontrollü elle çalıştırılan blok sistemi, yarı otomatik blok sistemi, otomatik blok sistemi, mekanik blok sistemi gibi değişik sistemlerde gelişmeye devam etmiştir (Söyler ve Açıkbaş, 2005). Türkiye‟de ilk sinyalizasyon uygulamaları Sirkeci-Halkalı banliyö hattının 1955 yılında kurulması ile başlamış ve 1968 yılında da Haydarpaşa-Ankara hattının sinyalize edilmesi ile devam etmiştir. 2005 yılında 9000 km civarında olan anahatların %20-25 civarı sinyalizasyona sahiptir (Söyler ve Açıkbaş, 2005).
Günümüzde demiryolu sinyalizasyon sistemleri anklaşman, ray devreleri, sinyaller, makaslar, balizler, tren araç üstü ekipmanları ve bunların birbiriyle haberleşmesini sağlayan senkron sayısal hiyerarşi (SDH), hat kenarı elektronik birimi (LEU) gibi alt parçalardan oluşmaktadır. Sinyalizasyon sistemleri trenlerin kontrolünü ve birbirleriyle çarpışmalarını önleyerek tren hattının verimli kullanılmasını sağlar. Ayrıca yolcular için güvenli ve hızlı bir seyahat sağlanmış olur.
Kullanılan bu sistemlerin belirli zaman dilimlerinde düzenli olarak bakımı, arızaların erken teşhisi arızaları önleme ve güvenli seyir açısından büyük önem taşımaktadır.
2.3. Sinyalizasyon Sistemlerinin Temel Öğeleri
Sinyalizasyon sistemleri genel olarak ray devreleri, sinyaller, makaslar, tren haberleşme ekipmanları, merkezi yazılım ve interlocking (anklaşman), onboard (tren araç üstü) ekipmanları öğelerinden oluşmaktadır.
2.3.1. Ray devreleri
Demiryollarında trenlerin konumlarını belirlemek amacı ile kullanılan basit elektronik elemanlardır. Türkiye‟de bulunan demiryollarında AC veya DC ray devreleri kullanılmaktadır. Bazı bölgelerde ray devreleri yerine aks sayıcı devreler de kullanılmaktadır. Ray devreleri anklaşman yazılımına ve CTC kumanda merkezine trenlerin konum bilgilerini iletmektedir (Yıldırım, 2012).
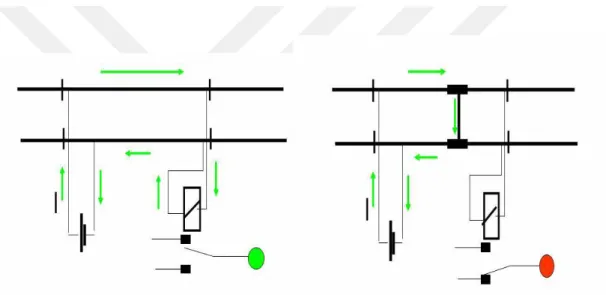
Şekil 2.1.‟de ray devresi çalışma prensibi verilmiştir. Trenin dingili tarafından rayların kısa devre edilmesi sonucu, trenin varlığını ortaya çıkaran, kapalı elektriksel bir devredir. Direk veya dolaylı olarak sinyaller, makaslar ve anklaşman sistemleri vasıtasıyla trenlerin emniyetli olarak ilerleyişini sağlar.
ġekil 2.1. Ray devresi çalışma prensibi
Trenin dingili raylar arasında en az direnci olan bir yol oluşturur ve bu yol elektrik akımı için alternatif bir rotadır. Alıcı sinyal şiddetindeki azalmayı hisseder ve röle bırakarak anklaşmana giden çıkışı keser, böylece ray devresi meşguliyet bildirimi verir.
2.3.2. Sinyaller
Sinyaller, demiryolu ulaşımının güvenliğini sağlayan, makinisti ilerideki ray bloklarının meşguliyeti konusunda bilgilendiren renkli ve ışıklı işaretlerdir. Bu işaretlerin anlamları kısaca şu şekilde özetlenebilir:
Kırmızı sinyal; rotanın tanzim edilmediğini veya ilerideki ray bloğunun dolu olduğunu makiniste bildirir. Tehlikeli bir durum var anlamına gelir.
Sarı sinyal; makiniste, iki sonraki ray bloğunun dolu olduğunu veya bir sonraki sinyalin kırmızı olduğunu ve hızını düşürmesi gerektiğini bildirir. Uyarı anlamına gelir. Yeşil sinyal ise rotanın açık olduğunu ve bir sonraki sinyalin de harekete engel teşkil etmediğini makiniste bildirir (Mecitoğlu, 2013).
Demiryolu sinyal lambaları dörtlü yüksek, üçlü yüksek, üçlü cüce olmak üzere üç çeşittir. Şekil 2.2‟de bir üçlü yüksek sinyal gösterilmiştir.
ġekil 2.2. Üçlü yüksek sinyal
2.3.3. Makaslar
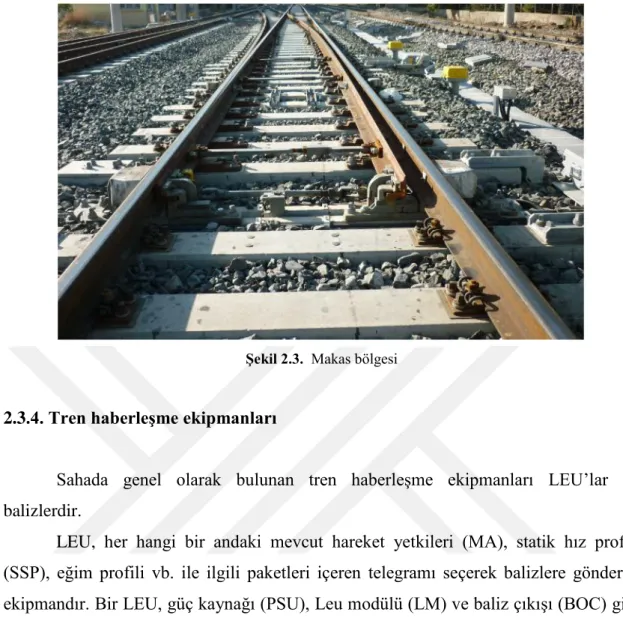
Makaslar, trenlerin yön değiştirerek istenilen yöne gitmesini sağlar. Her makasın normal ve sapan olmak üzere iki konumu bulunmaktadır. Trenin makas üzerinden yön değiştirmeden gittiği yön normal konum, yön değiştirerek gittiği konum ise sapan konum olarak adlandırılır. Motorlu ve dedektörlü olmak üzere iki çeşitleri vardır. Motorlu makaslar kumanda merkezinden kontrol edilebilmektedir ve makasın hangi konumda olduğu görülebilmektedir. Dedektörlü makasların ise sadece konumu görülebilmektedir (Yıldırım, 2012). Şekil 2.3‟te makaslı bir demiryolu bölgesi gösterilmiştir.
ġekil 2.3. Makas bölgesi
2.3.4. Tren haberleĢme ekipmanları
Sahada genel olarak bulunan tren haberleşme ekipmanları LEU‟lar ve balizlerdir.
LEU, her hangi bir andaki mevcut hareket yetkileri (MA), statik hız profili (SSP), eğim profili vb. ile ilgili paketleri içeren telegramı seçerek balizlere gönderen ekipmandır. Bir LEU, güç kaynağı (PSU), Leu modülü (LM) ve baliz çıkışı (BOC) gibi üç adet elektronik karttan oluşmaktadır. Şekil 2.4.‟te LEU kart yerleşimi gösterilmiştir. Bir LEU, birbirinden bağımsız olarak maksimum dört değişken balize veri transfer edebilmektedir. Bir ERTMS kabininde maksimum 12 LEU bulunur.
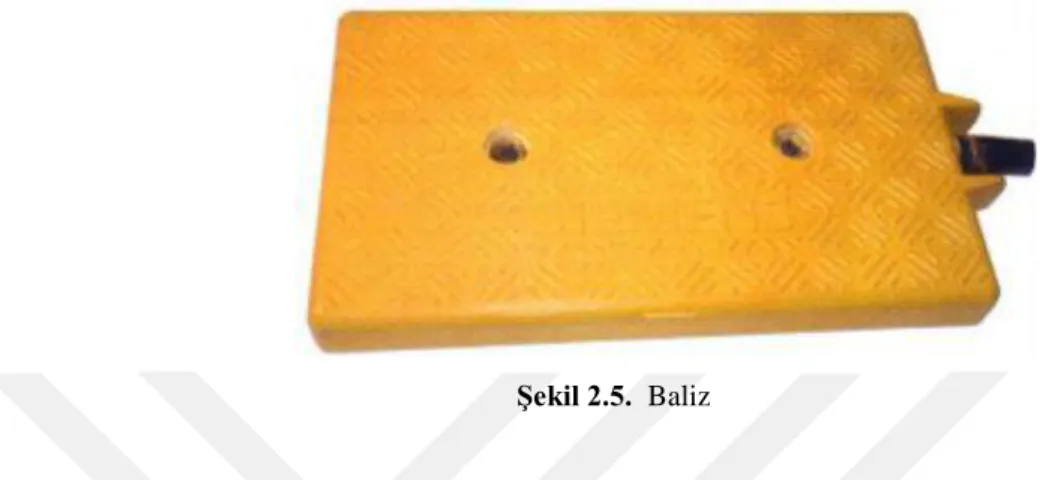
Baliz Trenin üzerinden geçişi sırasında hareket yetkisi (MA), statik hız profili (SSP), eğim profili, geçici hız sınırlamaları (TSR) ve yol durumları gibi kodlanmış sinyalizasyon verilerini trene aktaran iletim aygıtıdır. Kablolu (değişken) ve kablosuz (sabit) olmak üzere iki tipi vardır. Şekil 2.5‟te baliz gösterilmiştir.
ġekil 2.5. Baliz
Sabit balizler, içerisine programlanan ve değişmeyen sabit bilgileri trene ileten balizlerdir. Bu bilgiler;
• Seviye geçişleri
• Rota manevra sonlandırmaları • Tren konumunun yeniden-tespiti • Yol şartları
• Statik hız profilleri • Eğim profilleri
Değişken balizler, LEU (yol boyu elektronik ünite) tarafından seçilen ve hız profilleri, hareket izinleri ve yol şartlarını içeren farklı telegramlar gönderebilir. Bu bilgiler;
• Seviye geçişleri
• Rota manevra sonlandırmaları • Tren konumunun yeniden-tespiti • Yol şartları
• Statik hız profilleri • Eğim profilleri • Hareket İzni
2.3.5. AnklaĢman
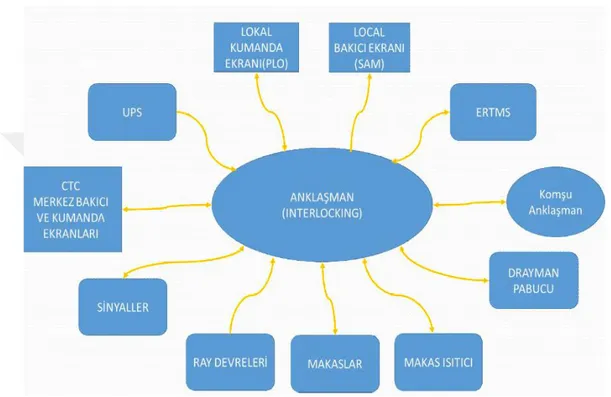
Bir istasyon içerisindeki ve komşu istasyonlar arasındaki trafiği güvenli bir şekilde kontrol eden sistemdir. Hat üzerindeki trafik durumunu, sinyalizasyon sistemlerini oluşturan elemanların durumunu denetlemekten, sorumlu olduğu anklaşmana trafik operatörü tarafından gönderilen kumandaları almak ve icra etmekten, sorumludur. Şekil 2.6.‟da anklaşman genel bağlantı çerçevesi gösterilmiştir.
ġekil 2.6. Anklaşman çerçeve yapısı
2.3.6. Merkezi trafik kontrolü (CTC)
Merkezi Trafik Kontrolü anlamına gelen CTC (Şekil 2.7.), tren işletmeciliğinin düzenli bir şekilde yapılabilmesi için kumandaların gönderildiği, hattın durumuna göre trenlere geçici hız kısıtlamalarının konulabildiği, bölge kontrol denetiminin yapılabildiği, merkezi bakım bilgisayarlarının ve sunucuların bulunduğu, trenlerin tam denetim halinde kontrol altında bulundurulup izlenebildikleri merkezi kontrol birimidir.
ġekil 2.7. Merkezi trafik kontrolü
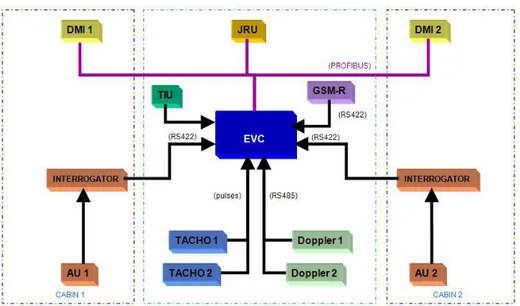
2.3.7. Tren araç üstü (onbaord) ekipmanları
ERTMS/ETCS, bir istasyon içerisindeki veya komşu istasyonlar arasındaki trafiği kontrol eden sistemdir. ERTMS ortaya çıkmadan önce, her bir Demiryolu İdaresi, demiryolu trafiğini kendi ATP sistemi ya da birkaç sistemle idare ediyordu. Günümüzde 15 farklı sistem bulunmaktadır.
ATP ekipmanları, ülkelere göre farklılık göstermektedir. Bu da, trenlerin bir ülkeden başka ülkeye güvenli bir şekilde geçmesini zorlaştırmakta ve ekipman açısından büyük maliyetler anlamına gelmektedir. Bu durumda tren araç üstü ekipmanlarda belirli bir standart zorunluluğu doğmuştur ve ERTM/ETCS sistemleri keşfedilmiştir. ERTMS araç üstü alt sistemi bileşenleri şunlardır.
● EVC: Avrupa Hayati Bilgisayarı ● DMI: Sürücü Makine Arayüzü ● JRU: Yasal Kayıt Ünitesi ● Baliz Okuyucu Alt Sistemi – BTM (Baliz İletim Modülü) – Anten Ünitesi
● Odometre Alt Sistemi – Takojeneratör
– Doppler Radarı ● GSM-R Verileri
ġekil 2.8. İki kabinli mimaride ERTMS ekipman yerleşimi
Yukarıda Şekil 2.8‟de bir tren araç üstü ekipman bağlantı şeması gösterilmiştir. Bu araç üstü ekipmanlarından olan JRU, trende veya sahada meydana gelen arızaları (örnek; baliz arızası) kayıt altında tutarak net olarak tespit edilemeyen arızaların çözümünde kolaylık sağlar.
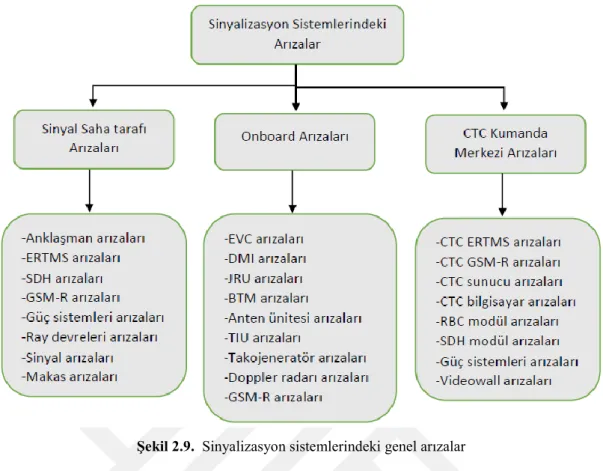
2.3.8 Arıza tipleri
Sinyalizasyon sistemlerindeki arızalar, sinyal saha tarafı arızaları, onboard arızaları ve CTC kumanda merkezi arızaları olarak ayrılmaktadır. Şekil 2.9‟da sinyalizasyon sistemlerindeki genel arızalar gösterilmiştir.
ġekil 2.9. Sinyalizasyon sistemlerindeki genel arızalar
Sinyal saha tarafı arızaları genellikle anklaşman, ERTMS, SDH, GSM-R, güç sistemleri, ray devreleri, sinyaller ve makaslar ile ilgilidir.
Anklaşman arızaları, teknik bina içerisinde bulunan anklaşman sistemlerinde meydana gelen arızalardır. Sistemle ilgili elektronik kartlar, router‟ler, switch‟ler ve güç kaynakları zamanla arıza vermektedir. Arıza giderimi için öncelikle tren hattı bakımcı bilgisayarından ilgili bölgedeki anklaşman elemenları kontrol edilip arızalı eleman tespit edilmektedir. Eğer herhangi bir tespit yapılamıyorsa, sistem gözle kontrol edilmektedir. Arızalı eleman tespit edilip arıza giderilmektedir.
ERTMS arızaları, teknik bina içerisinde bulunan ERTMS sistemi bilgisayarlarında ve kartlarında, router‟lerde, switch‟lerde, LEU‟larda ve balizlerde meydana gelen arızalardır. Balizlerde meydana gelen arızalar veri bağdaşım arızası olarak ortaya çıkmaktadır. Veri bağdaşım arızası sebepleri şunlardır.
- Baliz içerisindeki elektronik devrenin bozulması, - Kablolu balizlerin enerjisinin kesilmesi,
- Balizin tren veya başka bir demiryolu aracı tarafından darbe alıp kırılması veya zamanla gevşeyip yerinden çıkması,
- LEU tarafındaki modülün arızaya geçmesi, - Onboard kaynaklı veri bağdaşım arızası.
Arıza giderimi için bakımcı bilgisayarından ilgili ERTMS sistemi elemanları kontrol edilmektedir. Daha sonra teknik bina içerisinde bilgisayar ve kartlardan oluşan kabinler, router‟ler, switch‟ler, sahada bulunan LEU binaları ve balizler kontrol edilip arıza tespiti yapılmaktadır. Arıza durumuna göre müdahale edilip arıza giderilmektedir.
SDH arızaları, teknik bina içerisinde bulunan SDH kabinlerindeki kartların arızaya geçmesi, bağlantıyı sağlayan fiber ve ethernet kablolarının hasar görmesi, saha tarafındaki fiber hattında kopma ve sinyal zayıflaması sonucu meydana gelen arızalardır. Arıza giderimi için SDH arayüz programından arıza tespit edilmektedir. Eğer arıza uzaktan giderilebiliyorsa, ilgili arızalı modül uzaktan tekrar başlatılmaktadır. Arıza uzaktan giderilemiyorsa, önce teknik binada arızalı modül kontrol edilmektedir. Sinyal zayıflaması varsa fiber ölçümleri yapılmaktadır.
GSM-R arızaları, teknik bina içerisinde bulunan BTS (Base Tranceiver Station)‟lerde ve GSM-R antenlerinde meydana gelen arızalardır. Arıza giderimi için teknik binada BTS sistem modülleri kontrol edilmektedir. Eğer herhangi bir kart ve modül arızası yoksa, GSM-R sinyal ölçümleri yapılmaktadır.
Güç sistemleri arızaları, teknik bina içerisinde bulunan elektrik panolarında, ups sistemlerinde veya saha tarafında katener ve şebeke ile ilgili meydana gelen arızalardır. Arıza giderimi için bölgedeki teknik bina güç odası ve saha tarafı kontrol edilmektedir. Güç odasında genellikle invertörler, redresörler ve transfer panolarındaki elektrik elemanları arızaya geçmektedir. Saha tarafında ise trafo sigortaları atmakta veya şehir şebekesinde kesintiler oluşmaktadır.
Ray devreleri arızaları, teknik bina içerisindeki tranceiver‟lerin ve güç katının bozulması, saha tarafında ise alıcıların, vericilerin bozulması, ray devresi looplarının gevşemesi ve ray kırıklarının oluşması sonucu meydana gelen arızalardır. Arıza giderimi için bakımcı bilgisayarından meşgul olan