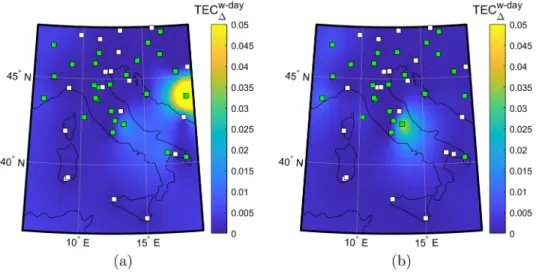
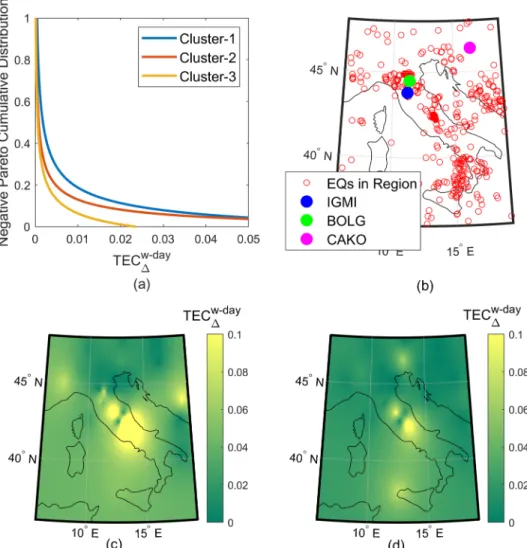
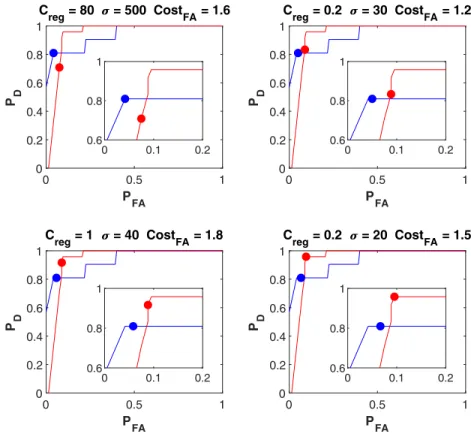
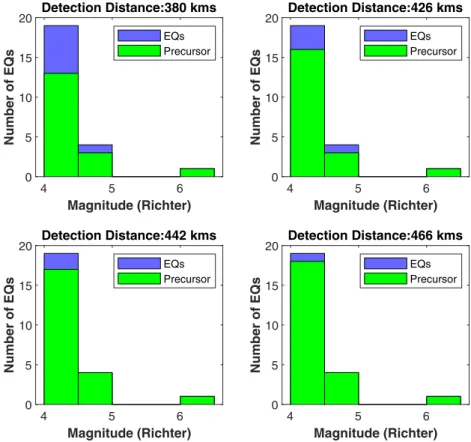
A machine learning‐based detection of earthquake precursors using ionospheric data
Tam metin
Şekil
Benzer Belgeler
In this thesis, we apply one of the efficient data mining algorithms called Very Fast Decision Tree (VFDT) for anomaly based network intrusion detection.. Experimental results on
during its early stages and mitigate its effects. The lack of an early epidemic warning system eliminated the opportunity to prohibit the epidemic spread at the initial stage.
İttir efsaneye nazaran, Yeni dünyadaki kahve ağaçlarının dedesi, Cavadaki kah~ ve plantasyonlarından celbedilen bir tek kahve ağacıdır.. Bu, hediye olarak
asır Anadolu’sunun kültür ikliminde İslam’ın kurumsallaşan tasavvuf veçhesinde yeşeren umran içinde yer alan Mevlevîlik ve Bektâşîlik gibi ya- pılar bu bakımdan
93 harbinde ailesile İslimiye den hicret etmiş, Göztepenin deniz tara fındaki muhacir mahallesine yerleş miş, Abdi Kâmil beyin (Şemsülma- arif) inden
Vizyonu sürdürülebilir rekabet için evrensel bilgi ve teknolojiler geliştirerek bölgenin gelişmesine ve ülke kalkınmasına katkı sağlayan bir teknoloji üretim merkezi
Geçen y ıl ülkemizde Derau Uzala adlı filmi büyük bir ilgiyle izlenen ünlü Japon yönetmeni A kir a Kurosowa, önümüzdeki günlerde W illiam Shakespeare’ in
Millî Mücadelede giydiği res mî elbise, kalpağı, çizmesi, foti ni, Sivas Kongresinde üzerinde bulunan caket, Büyük Nutkunu okuduğu zaman giydiği Redin
