T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
MOBĠL YERSEL LAZER TARAMA SĠSTEMLERĠNĠN FOTOGRAMETRĠK RÖLÖVE PROJELERĠNDE KULLANILABĠLĠRLĠĞĠ ÜZERĠNE BĠR ÇALIġMA Lütfiye KARASAKA DOKTORA TEZĠ
Harita Mühendisliği Anabilim Dalı
Kasım-2012 KONYA Her Hakkı Saklıdır
v ÖZET
DOKTORA TEZĠ
MOBĠL YERSEL LAZER TARAMA SĠSTEMLERĠNĠN FOTOGRAMETRĠK RÖLÖVE PROJELERĠNDE KULLANILABĠLĠRLĠĞĠ ÜZERĠNE BĠR
ÇALIġMA
Lütfiye KARASAKA
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Harita Mühendisliği Anabilim Dalı DanıĢman: Prof. Dr. Ferruh YILDIZ
2012, 138 Sayfa Jüri
Prof. Dr. Ferruh YILDIZ Prof. Dr. ġirzat KAHRAMANLI
Doç. Dr. Hakan KARABÖRK Doç. Dr. H. Murat YILMAZ
Doç. Dr. Murat YAKAR
Birçok medeniyete ev sahipliği yapmış olan Anadolu toprakları arkeolojik ve mimari eserler bakımından oldukça zengindir. Geçmişin izlerini, kültürünü yansıtan bu güzide eserlerin korunması, yaşatılması ve gelecek nesillere aktarılması için toplumsal sorumluluk bilincinin geliştirilmesi gereklidir. Ülkemizde son yıllarda kültürel mirasın bir parçası olan tarihi eserlerin yakından incelenmesi, belgelenmesi, arşivlenmesi ve mimari açıdan restitüsyon, restorasyon projelerinin hazırlanmasına yönelik çalışmalara büyük önem verilmektedir. Tarihi envanterlerin korunması ve belgelenmesine yönelik klasik belgeleme çalışmaları bilgisayar ve bilgi teknolojilerinde yaşanan gelişmeler ile yerini daha modern tekniklere bırakmıştır. Sayısal fotogrametri yöntemiyle fotogrametrik rölöve alımı yıllardır başarı ile kullanılan modern yöntemlerden biridir. Son yıllarda ise tarihi ve kültürel varlıkların korunması ve belgelenmesine yönelik çalışmalarda fotogrametrik rölöve alım tekniğine alternatif bir yöntem olarak yersel lazer tarama sistemlerinin kullanılması dikkat çekmektedir.
Bu tez kapsamında sayısal fotogrametri ve yersel lazer tarama yöntemine alternatif olarak yersel mobil lazer tarama sistemlerinin fotogrametrik rölöve çalışmalarında kullanılabilirliği araştırılmıştır. Bu çalışma ile yersel mobil lazer tarama sistemlerinin fotogrametrik rölöve alımı ve 3B şehir modelleme çalışmalarındaki yeterliliği, sayısal fotogrametri ve yersel lazer tarama yöntemlerinin kullanımının yetersiz kaldığı durumlarda bu yöntemlere alternatif bir yöntem olarak kullanılabilirliği tartışılmıştır.
Anahtar Kelimeler: Fotogrametrik Rölöve, Sayısal Fotogrametri, Yersel Mobil Lazer Tarama,
vi ABSTRACT
Ph.D THESIS
A STUDY ON THE ABILITY OF USING ROLOVE PROJECTS WITH MOBILE TERRESTRIAL LASER SYSTEMS
Lütfiye KARASAKA
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELCUK UNIVERSITY
THE DEGREE OF DOCTOR OF PHILOSOPHY IN GEOMATIC ENGINEERING
Advisor: Prof. Dr. Ferruh YILDIZ Year, 138 Pages
Jury
Prof. Dr. Ferruh YILDIZ Prof. Dr. ġirzat KAHRAMANLI Assoc. Prof. Dr. Hakan KARABÖRK
Assoc. Prof. Dr. H. Murat YILMAZ Assoc. Prof. Dr. Murat YAKAR
The land of Anatolia which has hosted many civilizations during history is quite rich in terms of archeological and architectural artifacts. It is needed to develop the sense of social responsibility in order to preserve, sustain and transmit these eminent artifacts reflecting traces of the past and culture to future generations. There has been increased importance to the studies for examination, documentation, archiving of historical buildings and preparation of restitution, restoration projects of these buildings which are part of the cultural heritage in our country in last years. Traditional studies done for the purpose of documentation and conservation of historical inventory have been replaced by the modern techniques with developments in computer and information technologies. Digital photogrammetry technique is one of the modern techniques which have been successfully used in architectural survey for years. To use territorial laser scanning systems as an alternative method to photogrammetric rolove method in conservation and documentation studies of historical and cultural properties has attracted more attention in recent years.
Within the scope of this thesis, it was studied the availability of using terrestrial mobile laser scanning systems as an alternative method to digital photogrammetry and terrestrial laser scanning method in photogrammetric rolove studies. Besides, it was aim of the thesis to discuss the satisfactoriness of mobile laser scanning in 3D city model and use of this technique when digital photogrammetry and terrestrial laser scanning methods are insufficient.
Keywords: Digital Photogrammetry, Photogrammetric Rolove, Terrestrial Mobile Laser
vii ÖNSÖZ
Lisans eğitimimden bu yana engin bilgi ve tecrübelerinden faydalandığım, her konuda desteğini hep yanımda hissettiğim, yüksek lisans ve doktora eğitimim boyunca danışmanlığımı yürüten sevgili hocam Prof. Dr. Ferruh YILDIZ' a bana böyle güncel bir konuda çalışma fırsatı tanıdığı için çok teşekkür ederim.
Tez çalışmamda verilerin elde edilmesi ve değerlendirilmesi sürecinde yardımlarını esirgemeyen Erkan Baygül'e, her zaman bilgi ve tecrübelerine başvurduğum Sabit Yaman' a teşekkürü bir borç bilirim.
Bu zorlu süreçte beni hiç yalnız bırakmayan, desteği ve yardımlarıyla güçlendiğim sevgili eşim Engin Karasaka'ya ve tam olarak neyle uğraştığımı anlamasada yaşından büyük bir olgunluk göstererek sabırla çalışmalarımın bitmesini bekleyen canım kızım Nehir Karasaka' ya gösterdikleri sabır ve özveri için ne kadar teşekkür etsem azdır. Bugünlere kadar gelmemde bana emeği geçen, desteklerini hiçbir zaman esirgemeyen, haklarını asla ödeyemeyeceğim canım annem ve babama, en umutsuz anımda beni hep yüreklendirin ve hakkını hiçbir zaman ödeyemeyeceğim teyzem Sema Günaydın'a bana inandığı ve güvendiği için çok teşekkür ederim, iyiki varsınız canım ailem. Ve son olarak bu zorlu yola beraber adım attığım, varlığı ile güçlendiğim moral bulduğum canım arkadaşım İlkay Buğdaycı' ya çok teşekkür ederim.
Lütfiye KARASAKA KONYA-2012
viii ĠÇĠNDEKĠLER ÖZET ... v ABSTRACT ... vi ÖNSÖZ ... vii ĠÇĠNDEKĠLER ... viii KISALTMALAR ... x 1. GĠRĠġ ... 1
1.1. Çalışmanın Amacı ve Bilime Katkısı ... 2
1.2. Tezin Genel Yapısı ... 5
2. KAYNAK ARAġTIRMASI ... 6
3. LAZER IġININ FĠZĠKSEL TEMELLERĠ ... 11
3.1. Lazer Işını Üretiminin Esasları ... 11
3.2. Elektromanyetik Işıma ve Elektromanyetik Dalgalar ... 14
3.3. Elektromanyetik Spektrum... 16
3.3.1. Elektromanyetik dalgaların madde ile etkileşimi ... 19
3.4. Lazer Teknolojisinin Tarihi Gelişimi ... 21
3.5. Lazer Işınının Özellikleri ... 22
3.5.1. Tek renklilik (Monochromatic) ... 22
3.5.2. Uyumluluk (Coherence) ... 23 3.5.3. Iraksama (Divergence) ... 23 3.5.4. Yoğunluk (Intensity) ... 26 3.5.5. Yönlendirilebilirlik (Directionality) ... 27 3.5.6. Yansıma (Reflectance) ... 28 3.6. Lazer Güvenliği ... 30
3.6.1. Tehlike seviyelerine göre lazerin sınıflandırılması ... 31
4. YERSEL LAZER TARAMA TEKNOLOJĠSĠ ... 33
4.1. Yersel Statik Lazer Tarama ... 35
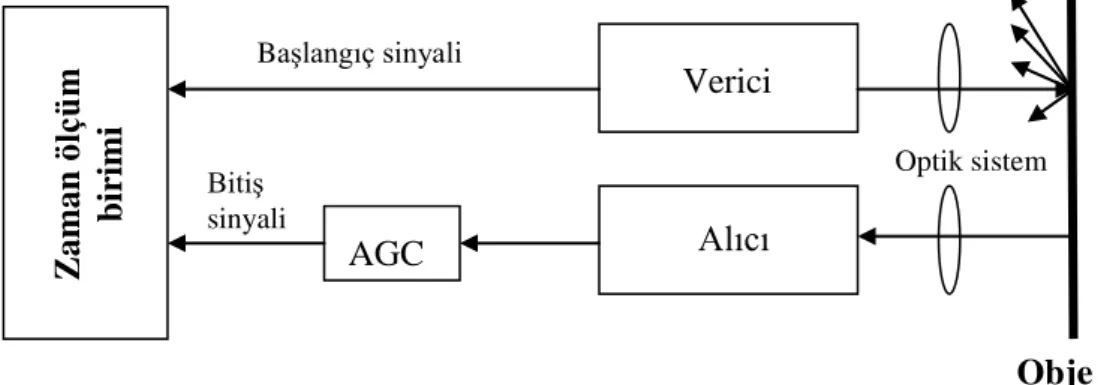
4.1.1. Lazer uzaklıkölçer ... 36
4.1.2. Açı ölçümü ve lazer ışını saptırma birimi ... 44
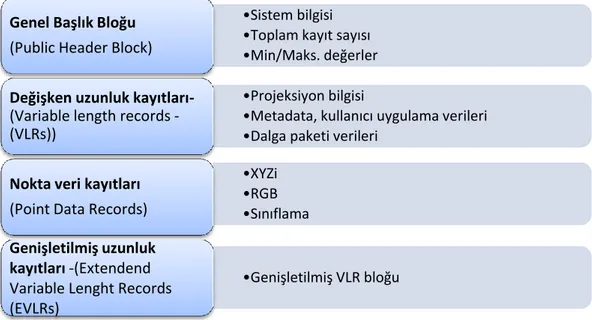
4.1.3. Lidar veri formatları ... 46
4.1.4. Lidar teknolojisinde kavramsal doğruluk ve hassasiyet ... 50
4.1.5. Yersel lidar teknolojisi hata kaynakları ... 52
4.2. Yersel Dinamik Lazer Tarama ... 66
4.2.1. Yersel dinamik lazer tarama sistem bileşenleri ... 70
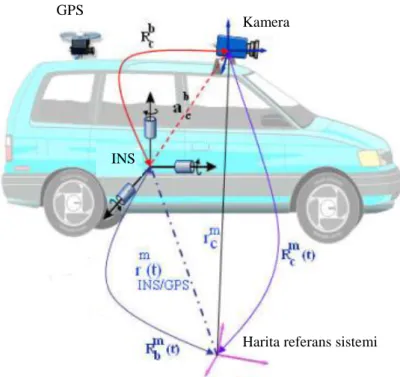
4.2.2. Yersel dinamik lazer taramanın matematik modeli ... 75
ix
5. ÇALIġMA BÖLGESĠ VE KULLANILAN LAZER TARAMA SĠSTEMLERĠ 82
5.1. Çalışma bölgesi hakkında genel bilgiler ... 82
5.2. Kullanılan donanım hakkında genel bilgiler ... 82
5.2.1. Yersel mobil lazer tarama (TOPCON IP-S2) ... 83
5.2.2. Yersel statik lazer tarama (Optech ILRIS-3D) ... 93
6. ARAġTIRMA BULGULARI VE TARTIġMA ... 94
6.1. Giriş ... 94
6.2. IP-S2 sistemi iş akışı ... 94
6.2.1. Görev planlama ... 95
6.2.2. Değerlendirme öncesi hazırlık çalışmaları ... 96
6.2.3. Veri toplama ... 97 6.2.4. Veri işleme ... 99 6.2.5. Sonuç ürün ... 103 6.3. Optech ILRIS-3D ... 109 6.3.1. Veri toplama ... 109 6.3.2. Veri işleme ... 109
6.4. Veri Setlerinden Elde Edilen Sonuçların Karşılaştırılması ... 110
7. SONUÇLAR ve ÖNERĠLER ... 121 7.1. Sonuçlar ... 121 7.2. Öneriler ... 126 8. KAYNAKLAR ... 128 EKLER ... 136 ÖZGEÇMĠġ ... 137
x
KISALTMALAR
ICOMOS :International Council for Monuments and Sites
CIPA :International Committee for Architectural Photogrammetry ISPRS : International Society for Photogrammetry & Remote Sensing ICOM : International Council for Museums
ICCROM : International Centre for the Conservation and Restoration of Monuments GNSS : Global Navigation Satellite System
IMU (Inertial Measurement System) EMR: Elektromanyetik radyasyon EMS: Elektromanyetik spektrum
LAZER: Light Amplification by Stimulated Emission of Radiation MAZER: Microwave Amplification of Stimulated Emission of Radiation ANSI Z136.1: American National Standard for the Safe Use Of Lasers
IEC 825 : International Electrotechnical Commission-Safety of Laser Products ASPRS : The American Society for Photogrammetry and Remote Sensing LiDAR: Lİght Detection and Ranging
TOF : time-of-flight
AGC: Automatic Gain Control CW: Continuous Wave
FOV : field-of-view
ASCII : American Standard Code for Information Interchange INS: Inertial Navigation System
1. GĠRĠġ
Farklı disiplinler tarafından birçok uygulamada kullanılan lazer teknolojisinin ilk çıkış noktası 1916 yılında Albert Einstein’ ın ortaya koymuş olduğu ışığın yayılma teorisine dayanmaktadır. Ancak dünyada lazer teknolojisi alanındaki araştırmalar, 1950’li yılların sonlarında başlamış 60 yıla yakın bir süreçte yapılan araştırmalarla bugünlere gelinmiştir. Özellikle 1990’lardan sonra bu alanda Ar-Ge’ye yönelik bilimsel çalışmalar yoğunluk kazanmıştır. Bugün lazer teknolojisi farklı platformlarda endüstriyel tasarımdan tıbbi görüntülemeye kadar oldukça geniş bir kullanım alanına sahiptir. Yersel lazer tarama sistemleri de bu alanda hızla gelişen teknolojilerden biridir. Yersel lazer tarayıcılarla elde edilen 3 boyutlu (3B) bilgi günümüzde pek çok mühendislik uygulamalarında farklı disiplinler tarafından kullanılmaktadır.
Son yıllarda ülkemizde tarihi ve kültürel varlıkların 3 boyutlu modellenmesi çalışmalarında yersel lazer tarama sistemlerinin kullanımı giderek yaygınlaşmaktadır. Pek çok kültürel mirasa ev sahipliği yapan ülkemizde bu nadide eserlerin korunması ve belgelenmesi önemli bir konudur. Geçmişin izlerini taşıyan bu güzide eserler doğal ya da insan kaynaklı tahribatlar nedeniyle hızla yok olmaktadır. Bu eserlerin yaşatılması için yapılan belgeleme çalışmalarınında hızlı, hassas ve detaylı olması gerekmektedir. Bir belgeleme tekniği olan klasik mimari rölöve çalışmaları, bilim ve teknoloji alanında yaşanan gelişmeler ile yerini 3 boyutlu modelleme, sayısal olarak arşivleme ve belgelemeye olanak veren sayısal fotogrametri ve yersel lazer tarama tekniklerine bırakmıştır. Yersel lazer tarama, objeye yüzeyine ait 3B nokta bilgilerinin yüksek hızla ve yüksek doğrulukla elde edildiği bir ölçme tekniğidir.
Yersel lazer tarama teknolojisi ile taranması düşünülen objeler küçük yapılar olabildiği gibi geniş, büyük ve karmaşık geometrili yapılar da olabilirler. Çalışma alanları yoğun nokta bulutu içeren mimari yapılar veya kentsel alanlar ise yersel lazer tarayıcılar üç boyutlu verinin doğru, hızlı ve ekonomik bir şekilde elde edilmesinde yetersiz kalmaktadır. Yersel lazer tarayıcıların eksiklikleri dikkate alınarak 3 boyutlu bilgiye daha hızlı ve daha etkin ulaşabilmek için yersel lazer tarama teknolojisi navigasyon sensörleri ve görüntüleme sensörleri ile bütünleştirilerek yeni bir mekânsal veri toplama tekniği geliştirilmiştir. Bugün için lazer tarama teknolojisinin geldiği son nokta yersel mobil lazer tarama sistemleridir. Mobil lazer tarama bir başka ifadeyle mobil haritalama, hareketli bir platform üzerine monte edilmiş algılayıcılar kullanılarak coğrafi veri toplama anlamına gelir. Mobil haritalama ile ilgili araştırmalar 1980' li
yılların sonlarına doğru başlamıştır. Bu teknoloji ilk olarak karayolu altyapısı haritalama ve ulaşım koridor envanterleri hazırlama ihtiyacıları için geliştirilmiştir. Mobil haritalamanın gelişimi ve ilerlemesi öncelikle dijital görüntüleme ve doğrudan konumlama teknolojisinin ilerlemesine yol açmıştır. 1990 yılların sonlarına gelindiğinde yersel mobil haritalama sistemleri birçok ticari çalışmada yer almıştır. Mobil lazer tarayıcıların son yıllarda 3B şehir modelleme, deformasyon ölçümleri, buzul araştırmaları, ormancılık uygulamaları gibi çalışmalarda kullanılması bu teknolojinin popülaritesini daha da artırmaktadır.
Bu tez çalışması kapsamında bugüne kadar rölöve uygulamalarında kullanılan sayısal fotogrametri ve yersel lazer tarama tekniklerinden farklı olarak yeni bir ölçme tekniği olan yersel mobil lazer tarama sisteminin fotogrametrik rölöve çalışmalarında kullanılabilirliğini araştırılmıştır. Uygulama yaklaşık 400 metrelik güzergâh içinde yersel statik lazer tarama ve yersel mobil lazer tarama sistemleri kullanılarak gerçekleştirilmiştir. Yersel mobil lazer tarama sisteminin fotogrametrik rölöve ve 3B şehir modelleme çalışmalarındaki yeterliliğini ve kullanılabilirliğini test etmek amacıyla bir dizi ölçmeler gerçekleştirilmiştir. Elde edilen veri setleri aynı uygulama alanı içinde yapılan yersel lazer tarama ölçme verileri ile kıyaslanarak araştırma bulguları yorumlanmış ve yersel lazer tarama sistemlerinin fotogrametrik rölöve çalışmalarında kullanılabilirliği tartışılmıştır.
1.1. ÇalıĢmanın Amacı ve Bilime Katkısı
Rölöve bir yapının, kent dokusunun veya kültürel mirası oluşturan herhangi bir tarihi eserin yakından incelenmesi, belgelenmesi, arşivlenmesi ve mimari açıdan restitüsyon, restorasyon projelerinin hazırlanabilmesi için yapılan bir çalışmadır. Fransızca bir kelime olan rölöve latin kökenli olup fiil hali olarak "relever" yeniden ayağa kaldırmak anlamına gelir (Güleç, 2007). Dolayısıyla rölöve mevcut bir yapının plan, kesit, cephe ve detayları ile birlikte kâğıt üzerinde çizim olarak ifade edilebilmesi için yapılan ölçü alma işlemidir. En yalın ifadeyle rölöve bir belgeleme çalışmasıdır.
Dünya üzerinde tarihi ve kültürel varlıkları koruma ve belgeleme çalışmalarına öncülük eden UNESCO, ICOMOS(International Council for Monuments and Sites), CIPA (International Committee for Architectural Photogrammetry), ISPRS (International Society for Photogrammetry & Remote Sensing), ICOM (International
Council for Museums), ICCROM (International Centre for the Conservation and Restoration of Monuments) gibi birçok uluslarası kuruluş vardır.
Bütün dünyada olduğu gibi ülkemizde de tarihi ve kültürel varlıkların korunması ve belgelenmesi önemli bir konudur. Birçok medeniyete kucak açan Anadolu topraklarının sahip olduğu tarihi ve kültürel varlıkların korunması, gelecek nesillere aktarılması ve sürekliliğinin sağlanması amacıyla Kültür Varlıkları ve Müzeler Genel Müdürlüğü bünyesinde çeşitli çalışmalar yürütülmektedir.
Günümüzde kültürel mirasın belgelenmesine yönelik yapılan çalışmalar teknolojinin getirdiği yenilikler ile birlikte gelişerek rölöve projelerinin hazırlanmasında kullanılan klasik mimari rölöve teknikleri yerini daha teknolojik ve modern yöntemlere bırakmıştır. Sayısal fotogrametri yöntemiyle fotogrametrik rölöve alımı yıllardır başarı ile kullanılan modern yöntemlerden biridir. Gelişen bilgisayar teknolojileri ile birlikte klasik mimari rölöve alımında oldukça zahmetli ve zaman alan çizim işlemleri sayısal fotogrametri yöntemiyle daha kolay, daha hızlı, daha hassas ve görsel açıdan daha zengin olarak elde edilmektedir.Bu yöntemle elde edilen sonuç ürünlerin sayısal olması bu ürünlerin bilgisayar ortamında rahatlıkla yönetilmesine, paylaşımına ve saklanmasına imkân tanımaktadır. Sayısal fotogrametri yöntemiyle elde edilen sonuç ürünün fotogrametrik rölöve uygulamalarının yanısıra CBS ortamında sunulması bu yöntemin sağladığı diğer avantajlardan biri olarak görülmektedir.
Son yıllarda özellikle tarihi ve kültürel varlıkların korunması ve belgelenmesi çalışmalarında sayısal fotogrametri yöntemine alternatif bir yöntem olarak yersel lazer tarama sistemlerinin kullanılması dikkat çekmektedir. Yersel lazer tarayıcılar obje geometrisi hakkında çok kısa bir zaman periyodunda, hızlı, doğrudan, düşük maliyetli ve yüksek doğruluklu 3B koordinat bilgisi elde etmeye yarayan donanımlardır. Yersel lazer tarama sistemleri yeni bir teknoloji olmasına rağmen ülkemizde özellikle fotogrametrik rölöve çalışmalarında oldukça ilgi görmekle beraber geniş kullanım alanlarına da sahiptir.
Bu yeni teknoloji özellikle;
Özellikle yersel fotogrametri ile çizimi ve üç boyutlu modellemesi güç olan karmaşık geometriye sahip obje yüzeylerinde ,
Süre yönünden kısıtlamaların bulunduğu büyük çalışmalarda, tercih edilmektedir.
Söz konusu uygulama alanları yoğun nokta bulutu içeren mimari yapılar, tarihi kent alanları veya 3B şehir modelleme gibi büyük projeler ise yersel statik lazer
tarayıcılar üç boyutlu verinin doğru, hızlı ve ucuz bir şekilde elde edilmesinde yetersiz kalabilmektedir. Son yıllarda hızla küreselleşen dünyada yüksek çözünürlüklü 3B model oluşturma çalışmalarına yeni bir boyut getiren yersel lazer tarama sistemlerinin geldiği son nokta yersel mobil lazer tarama teknolojisidir. Bu yeni teknoloji hareketli bir platform üzerine entegre edilen yüksek performanslı GNSS/IMU navigasyon sensörleri ve digital görüntüleme sensörleri ile birlikte eş zamanlı olarak genel bir koordinat sisteminde coğrafi veri toplayan bir sistemdir.
Mobil yersel lazer tarama sistemleri; 3B şehir modelleme çalışmaları,
Karayolu ve demiryolu varlık envanteri çıkarımı ve yönetimi, Tarihi ve kültürel varlıkları koruma ve belgeleme çalışmaları, Deformasyon ölçümleri,
Çevre bilimi çalışmaları
Kıyı bölgesi erozyon analizi çalışmaları,
gibi uygulama alanlarının zenginliği ile dikkat çekmektedir. 3B sorgulanabilir şehir modelleme çalışmaları yersel mobil lazer tarama sistemlerinin temel uygulama alanları arasında ilk sırada yer almaktadır.
Bu çalışmada sayısal fotogrametri ve yersel lazer tarama yöntemine alternatif olarak yersel mobil lazer tarama sistemlerinin fotogrametrik rölöve çalışmalarında kullanılabilirliği araştırılmıştır. Bu çalışma ile mobil lazer tarama sistemlerinin fotogrametrik rölöve alımı ve 3B şehir modelleme çalışmalarındaki yeterliliği, sayısal fotogrametri ve yersel statik lazer tarama yöntemlerinin kullanımının yetersiz kaldığı durumlarda bu yöntemlere alternatif bir yöntem olarak kullanılabilirliği tartışılacaktır.
Bu çalışmanın bilime katkısı şu şekilde özetlenebilir;
Elde edilen veriler, tarihi ve kültürel varlıkları koruma, belgeleme ve restorasyon gibi eylemlerin yerine getirilebilmesi için temel bir altlık oluşturabilir,
3B sorgulanabilir kent modeli uygulamaları oluşturulabilir ve bu uygulamaları internet üzerinden kullanıcıların erişimine sunulabilir, Elde edilen veriler birçok farklı disiplinin çalışmalarına temel
1.2. Tezin Genel Yapısı
Tez toplam 7 farklı bölümden oluşmaktadır. Bölümlerde ele alınan konulara ilişkin kısa ve öz bilgiler aşağıda verilmiştir.
Birinci bölümde, yapılan çalışmanın amacı, hedefi ve bilime katkısı ile tezin genel yapısı hakkında bilgiler verilmiştir.
İkinci bölümde, literatürde geçmişten günümüze kadar mobil lazer tarama sistemleri ile ilgili yapılan çalışmalar kısaca özetlenmiştir.
Üçüncü bölümde, lazer ışını üretiminin esasları, elektro manyetik ışıma ve lazer dalga boyları, elektromanyetik spektrum, lazer teknolojisinin tarihi gelişimi ve lazer ışının özellikleri ile ilgili bilgilerin yanısıra, lazer güvenliği hakkında bilgiler verilmiştir.
Dördüncü bölümde, yersel lazer tarama teknolojisi başlığı altında yersel statik lazer tarama ve yersel dinamik lazer tarama yöntemleri ve uygulama alanlarından bahsedilmiştir. Yersel statik lazer tarama başığı altında lazer mesafe ölçme yöntemleri, lidar veri formatları, lidar teknolojisinde kavramsal doğruluk ve hassasiyet ve yersel lidar teknolojisi hata kaynakları hakkında bilgilere yer verilmiştir. Yersel dinamik lazer tarama başlığı altında ise yersel dinamik lazer tarama sistem bileşenleri, matematik modeli ve hata kaynakları konularına değinilmiştir.
Beşinci bölümde, bu tez kapsamında uygulamanın yapıldığı çalışma bölgesi, kullanılan lazer tarama sistemleri ve teknik özelliklerinden bahsedilmiştir.
Altıncı bölümde, uygulama öncesi planlama ve ön hazırlık çalışmaları, veri elde etme ve veri işleme işlem adımları anlatılmış ve veri setlerinden elde edilen sonuçlar karşılaştırılmıştır.
Yedinci bölümde, veri setlerinden elde edilen sonuçlardan yararlanılarak ulaşılan bulgular yorumlanmış, IP-S2 dinamik lazer tarama sisteminin kentsel alanlarda kullanımı ve statik lazer tarama sistemleri ile elde edilen veriler ile kıyaslanması sonucu fotogrametrik rölöve çalışmalarında kullanılabilirliği tartışılmıştır.
2. KAYNAK ARAġTIRMASI
Barber, D., ve arkadaşları (2008), yersel mobil haritalama sistemleri aracılığıyla toplanan nokta bulutu verilerinin geçerliliğini onaylamak için ulusal haritalama dairesi adına bir çalışma gerçekleştirmişlerdir. Bu çalışmada boydan boya iki test alanında StreetMapper sistem kullanılarak elde edilen verilerin doğruluğu hesaplanmaya çalışılmıştır. Test alanı olarak en iyi ve en kötü koşullar içeren iki bölge seçilmiştir. Bu bölgeler ev yoğunluğunun az olduğu geniş caddeler ihtiva eden şehir dışındaki yerleşim alanları ile eski endüstriyel binalar ve uzun ambarlar içeren dar caddelerdir. Her iki test alanında sistemin doğruluğunun hesabı tekrarlı veri toplama şeklinde yapılmıştır. Yükseklik hassasiyetindeki başarının 0.031m ve 0.029m arasında (%95 oranında) elde edildiği belirtilmiştir. Yükseklik ölçmelerini doğruluğu, kontrol noktalarına dayalı olarak toplanan lazer tarama ölçümü gibi aynı anda geleneksel ölçme teknikleri kullanılarak değerlendirilmiştir. Birinci test bölgesi ve ikinci test bölgesinde (endüstriyel bölge) yapılan ölçmelerde kullanılan kontrol noktalarının minumum, maksimum ve ortalama standart sapmaları mobil lazer tarayıcının tek bir lazer sensörü-(Q120) dikkate alınarak karşılaştırılmıştır. Ayrıca her iki çalışma bölgesinde yükseklik doğruluğunun istatistiği, farklı lazer sensörlerinin karesel ortalama hataları kıyaslamalı olarak verilmiştir. Elde edilen veriler doğrultusunda mobil haritalama sisteminin binalarlar dolu bölgelerde nispeten başarılı bir biçimde kullanılabileceği kanıtlanmıştır.
Ellum, C., ve El-Sheimy, N., (2002), yılında yapılan çalışma yersel mobil haritalama sistemlerinin doğrudan geo-referanslama konusuyla ilgilidir. Mobil haritalama sistemlerinin tarihsel gelişimi hakkında bilgi verilmiş, bu sistemlerin uygulamaları tartışılmıştır. Doğrudan georeferanslama teorisinin matematik modeli hakkında bilgi verilmiştir.
El-Sheimy (2008), yersel mobil lazer tarama sisteminin tarihsel gelişimi, yersel lazer tarama sistemlerinde kullanılan georeferanslama ilkelerinin detayları, sistem kalibrasyonu konularına değinilmiştir. Bu çalışmada, Calgary üniversitesi tarafından geliştirilen "VISAT" ve "Backpack" yersel mobil haritalama sistemlerinin performansları test edilmiştir. VISAT yersel mobil lazer tarama sistemi ile gerçekleştirilen uygulamaya göre ideal koşullarda GPS/INS mutlak doğruluğu yatayda 0,13 m düşeyde 0.08 m, GPS sinyallerinin bloke olduğu sadece INS' in devreye girdiği elverişsiz koşullarda ise yatay 0,29 m düşey 0.19 m ile sonuçlanmıştır. Backpack yersel mobil lazer tarama sistemi ile gerçekleştirilen uygulamada ise 20 metre mesafedeki
noktaların konum doğruluğunun 40 metre mesafedeki noktaların konum doğruluğuna göre daha iyi olduğu sonucuna ulaşılmıştır.
Godha (2006), Calgary Üniversitesi kampüs yerleşkesinde yapmış olduğu çalışmada aracın 0-70 km/saat arasında değişen hızlarda Crista marka IMU sensörü ve Honeywell HG1700 IMU sensörünün konumsal karesel ortalama hataya olan etkisini incelemiştir. Uygulama bölgesinde trafik lambaları ve yaya yollarının olması araç hızının stabil olmasını etkilemiş ve araç genellikle düşük hızlarda seyir halinde veri toplamıştır. Elde edilen sonuçların karesel ortalama hataya etkisi Crista-15 IMU sensörü x bileşeni için 0,69 m, y bileşeni için 0,48 m, z bileşeni için 1,27 metredir. Honeywell HG1700 IMU sensörünün konumsal karesel ortalama hataya olan etkisini x bileşeni için 0,48 m y bileşeni için 0,44 m ve z bileşeni için 0,72 m'dir.
Haala, N., ve arkadaşları (2008),küçük alanlarda üç boyutlu veri elde etmek için kullanılan yersel statik lazer tarayıcılar ile büyük alanlarda helikopterler veya uçaklardan veri toplanmak için kullanılan hava lazer tarayıcıları hakkında detaylı bir araştırma yapılmıştır. Hızlı ve düşük maliyet gerektiren büyük projelerde her iki yöntemin kullanım imkânları araştırılmıştır. Bu çalışma ile taşıt üzerine monte edilen StreetMapper sisteminin performansı ve iş akışı tanımlanmıştır. Araç üzerinde yer alan, 4 adet 2B lazer tarayıcı, GNSS ve IMU (Inertial Measurement System) sistem bileşenleri aracılığı ile Stuttgart şehir merkezinde yaklaşık olarak 1,5km*2km boyutlarında bir alanda çalışılarak 3B nokta bulutu verileri elde edilmiştir. Ölçülen 3B nokta bulutlarının doğruluğunun araştırılması var olan bir 3B şehir modelinden referans değerleri kullanılarak belirlenmiştir. Bu çalışma ile StreetMapper sisteminin yoğun 3B ölçümler için uygulanabilirlik doğruluğunun en iyi GPS sinyali alma koşullarında 3cm düzeyinde olduğu kanıtlanmıştır.
Kertsen, T.P., ve arkadaşları (2009), İstanbul tarihi yarımadasında dinamik yersel lazer tarama teknikleri ile belgeleme amaçlı bir çalışma gerçekleştirmişlerdir. Şehir plancıları, mimarlar, turizm, haberleşme, çevre koruma ve diğer meslek gruplarını içeren pek çok disiplin İstanbul için dijital 3 boyutlu bir şehir modeli talep etmektedirler. Bu tür veriler ile şehir modelleri hızlı, doğru, ekonomik ve daha ayrıntılı olarak ekonomik açıdan verimli bir şekilde elde edilebilmektedir. Şehir modelleme uygulamaları için mobil haritalama sistemleri hızları ve hareketlilikleri sayesinde önemli bir yarar sağlamaktadır. Tarihi yarımada projesi, yaklaşık olarak 48000 adet bina ile dar sokaklar içeren toplam uzunluğu yaklaşık olarak 400 km olan 1500 hektarlık bir alanı kapsamaktadır. 1500 hektarlık çalışma alanın sadece 80 hektarlık kısmı statik lazer
tarama tekniği ile 6 ayda tamamlanabilmiştir. Statik lazer tarama tekniği ile günde en çok 0.7 hektarlık bir alanın taraması yapılabilmektedir. Bu nedenle projenin çok uzun yıllar süreceği nedeniyle çalışmaya dinamik lazer tarama teknikleri de dâhil edilmiştir.
Niu ve ark. (2010) yılında yapmış oldukları çalışmada aracın yavaş hızlarda veya hareketsiz durumda iken mikro elektro-mekanik (MEMS) GPS/INS georeferanslama sistemlerinin performansını araştırmışlardır. GPS/INS entegreli yersel mobil lazer tarama sisteminde düşük araç hızının konum hatasına etkisini x ve y bileşenlerinde 0,33 m z bileşeninde 0,50 m olarak elde etmişlerdir.
Pfeifer, N., ve Briese, C., (2007) yılında yapmış oldukları çalışmada lazer tarama sistemlerinde kullanılan farklı mesafe ölçme ilkeleri hakkında bilgi vermişlerdir. Bununla birlikte lazer tarama yöntemlerinin farklı platformlarda kullanımından ve lazer tarama sistemlerinde kullanılan farklı ışın saptırma mekanizmaları hakkında bilgi verilmiştir. Bu çalışmada ayrıca yersel ve hava lazer tarama yönteminin matematiksel modeli açıklanmıştır. Veri elde etme ve dönüşüm algoritmaları açıklanarak nokta bulutlarından model üretme ve bu modellerin farklı amaçlar için kullanımı üzerinde durulmuştur.
Pfeifer ve ark., (2008), hedef yansıtırlığı konusunda yapmış oldukları çalışmada Optech ILRIS 3D ve Reigl LMS-Z420i marka yersel lazer tarayıcıların performanslarını test etmişlerdir. Çalışmada, yansıtıcılık özellikleri bilinen hedefler kullanılmıştır. Bu hedeflerin panel tipi Spectralon malzemedir. Spectralon en yüksek dağınık yansıma yüzeyine sahip polimer bir malzemedir ve üzeri elektomanyetik spektrumun morötesi, görünür ve yakın kızıl ötesi bölgeleri ile kaplıdır. Bu yüzeyler ışını Lambert' in Kosinus Kanunu'na göre yansıtır. Kalibrasyon hedefleri, lazerler için optik pompalama çukurları gibi çeşitli optik bileşenlerin yapımı için işlenebilen bir malzemedir. Dalga boyu aralığı 400nm-1500nm olan ışınlar için spectralon yansıması genellikle %99, 250nm-2500nm aralığında ise %95 civarındadır (URL1). Çalışmada kenar uzunluğu yaklaşık 13cm dörtgen biçimli, yansıtması %5, %20,%40, %60,%80 ve%99 olan metal çerçeve üzerine monte edilmiş altı adet hedef işaretleri kullanılmıştır. Metal çerçeveler lazer tarayıcıdan farklı mesafelere ve farklı görüş açılarına yerleştirilerek Reigl (1550nm) ve Optech (1540nm) marka lazer tarayıcıların hedef yansıma değerleri bulunmuştur. Her iki lazer tarayıcı için farklı mesafeler kullanılarak iki seri ölçüm yapılmıştır. Reigl marka tarayıcı için kullanılan hedeflerin yansıma değerleri 1m aralıklarla 15m mesafeye kadar ve 5m aralıklarla 50m mesafeye kadar ölçülerek 0.986, 0.828, 0.653, 0.433, 0.233 ve 0.081 yansıma değerleri elde edilmiştir. Dalga boyu 1540nm olan Optech marka lazer tarayıcı
ile hedef yansıma değerleri 0.986, 0.827, 0.653, 0.433, 0.233 ve 0.080 olarak belirlenmiştir.
Reshetyuk, Y., (2006), yaptığı çalışmada yersel lazer tarama teknolojisinde uçuş zamanlı mesafe ölçme yönteminin temelleri ve yersel lazer tarama teknolojisi hata kaynakları hakkında bilgiler vermiştir.
Silva, J., ve arkadaşları (2003), bu çalışmada bir minibüs aracının üstüne stereo olacak şekilde monte edilen iki dijital video kamera, iki GPS alıcısı (Ashtech Reliance ve Garmin 12 XL), bir dizüstü bilgisayar ve ses senkronizasyon sisteminden oluşan düşük maliyetli yersel mobil tarama sisteminin ilk örneğini sunmuşlardır. Görüntüleme sensörleri stereo video kamera görevini üstlenmek üzere aracın üstüne GPS anteni ile birlikte monte edilmiştir. GPS alıcıları ve bilgisayar, planlanan zaman aralıklarında araç konumu ile ilgili olarak veri kaydetmek üzere yapılandırılmıştır. Ölçümlerden önce kameraların kalibrasyon işlemi yapılarak kamera iç yöneltme parametreleri belirlenmiştir. Kamera kalibrasyonu için 54 adet hedef işareti kullanılmıştır. GPS sinyallerini almak üzere kameraların ortasına Ashtech Z-XII alıcısı yerleştirilmiştir. Ashtech Z-XII alıcısının anteni bir referans istasyonuna sabitlenmiştir. GPS veri toplama aralığı her iki alıcı için 1 saniye olarak ayarlanmıştır. Video kameraların senkronizasyonu uzaktan kontrol ünitesi ile sağlanmaktadır. görüntü elde etme ile beraber başlatılmıştır. Kameralar Fujitsi marka dizüstü bilgisayar tarafından yayınlanan bir ses sinyalini kullanarak GPS sinyali ile senkronize edilmiştir. Bu işlem, özel olarak C dili yazılımda tasarlanmış ve her iki saniyede bir bilgisayarın saat zamanı ile birlikte Garmin 12XL alıcısı tarafından yayınlanan sinyal konumlarını kayıt eden bir programı kullanmak suretiyle gerçekleştirilmiştir. Bu çalışmada üç deneysel proje yürütülmüştür. Sokak görüntülerinin işlendiği ilk proje 1:2000 ölçekli topoğrafik harita üretimi ile sonuçlanmıştır. İkincisi, yol görüntülerini kullanarak karayolu haritalama işlemlerinin araştırıldığı 1:10000 ölçekli topografik harita üretimi ile sonuçlanmıştır. Son proje ise daha önceki projelerde elde edilmiş görüntülerin niceliğinin organize edilmesinde karşılaşılan problemleri gidermek adına georeferanslanmış yol görüntü veritabanlarının geliştirilmesi üzerine odaklanmıştır.
Wang, F., ve arkadaşları (2010), yaptıkları çalışmada mobil haritalama için kendi laboratuarlarında bir mobil lazer tarama sistemi geliştirmişlerdir. Çalışmanın hedefi konumlama doğruluğunu etkileyecek olan olası hata kaynakları faktörlerinin analizi esasına dayanmaktadır. Hata kaynakları olarak tarama aralığı hatası, tarama açısı hatası, sistem montaj hatası, senkronizasyon hatası, enterpolasyon hatası, koordinat
dönüşümü hatası ve GPS konumlama hatası ayrıntılı olarak ele alınmıştır. Mobil lazer tarama sisteminin konumlama hatasını hesaplamak için bir cadde üzerinde 9 özel nokta mobil lazer tarayıcı ve total station kullanılarak ölçülmüştür. Sonuçlar 1:2000 ölçekli harita gereksinimini karşılayabilme çerçevesinde tartışılmıştır.
3. LAZER IġININ FĠZĠKSEL TEMELLERĠ
Topografik lazer profili ve tarama sistemleri son yıllarda olağanüstü gelişmelere konu olmuştur. Bu sistemler şüphesiz ki son yıllarda ortaya konulan 3B mekânsal veri elde etme teknolojilerinin en önemlisidir. Bu bölümde elektro manyetik ışıma ve lazer dalga boyları, lazer teknolojisinin tarihi gelişimi ve bu teknolojinin temelleri hakkında bilgi verilecektir.
3.1. Lazer IĢını Üretiminin Esasları
Fiziğin bir dalı olan optik ışığın özelliğini, hareketini ve madde ile etkileşimini inceler. Lazer kavramının temeli ışık fotonlarına dayanır. Dolayısıyla lazer kavramının anlaşılması doğrudan ışık kavramı ile ilişkilidir.
Işığın oluşumu;
Bir atom, yörüngesinde proton ve elektronlar içeren bir çekirdekten oluşur. Atomun yapısını açıklayan ve bugün için kabul edilen son teori Kuantum Atom Teorisi'dir. Kuantum Atom Teorisi' ne göre atomun merkezinde çekirdeğin etrafında yer alan elektronlar, orbital adı verilen belli bölgelerde bulunurlar. Lazerin temeli de farklı enerji düzeyleri arasındaki elektron geçişleri ile oluşan ışık fotonlarına dayanır. Bir atoma enerji verildiğinde elektronlar çekirdekten daha uzakta yeni bir yörüngeye sıçrar. Sıçrayan elektronların seçimi ve sayısı, sıçramanın boyutu atoma uygulanan enerjinin miktarına bağlıdır. Elektronlar çekirdeğe yakın bir yörüngeye sıçradıklarında enerjilerini salarlar. Bu açığa çıkan enerji elektromanyetik alanın kuantumu olarak da ifade edilen foton terimidir. Bir başka ifadeyle foton, elektromanyetik dalganın taşıyıcısıdır. Fotonlar tarafından taşınan enerji, atomu uyarmak için verilen geçiş enerjisine eşittir. Farklı dalga boylarındaki fotonlar farklı miktarlarda enerji taşırlar. Bu yüzden bir atomdan yayılan ışığın dalga boyu olası her bir elektron sıçraması ile ilgili olarak atomun enerji miktarına bağlıdır (Angelopoulou ve Wright, 1999).
ġekil 3.1 Enerjisini salmış bir atomun foton biçiminde gösterimi (Angelopoulou&Wright,1999). Bir atomun uyarılarak temel enerji seviyesinden farklı bir enerji seviyesine geçmesi aşağıda belirtilen durumlardan birinin yerine getirilmesi ile mümkün olmaktadır;
Basınç uygulayarak Isıtılarak
Hızlandırılmış elektronlarla bombardıman ederek Bir ışık demetine maruz bırakarak
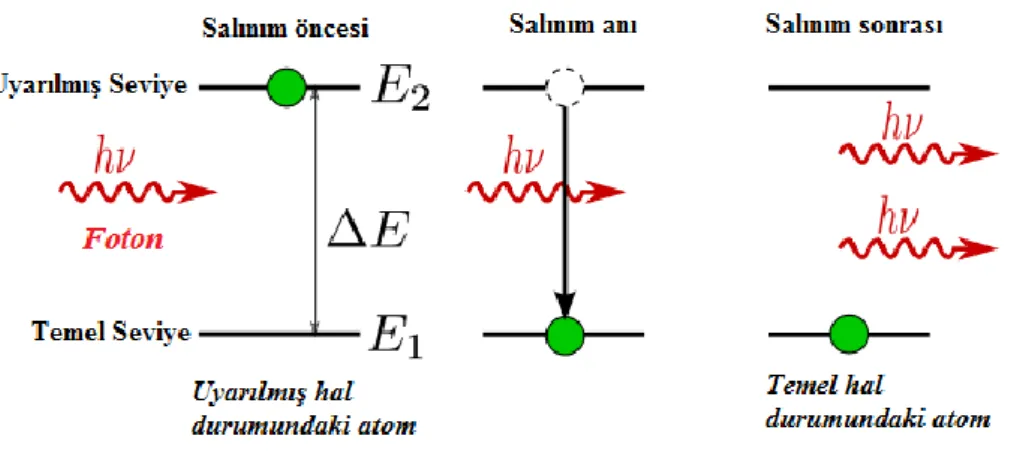
Einstein'in ışık yayınımı teorisinde uyarılmış bir atomun daha düşük enerjili bir konuma foton yayarak iki farklı şekilde geçebileceği anlatılmıştır (Çelen, 2006). Bu geçiş kendiliğinden salınım (spontaneous emission) ve uyarılmış salınım (stimulated emission) olmak üzere iki şekildedir. Kendiliğinden salınım; kendi kendine meydana gelir ve neredeyse doğada gördüğümüz bütün ışık kaynakları (güneş, yıldızlar, florasan ampül, eski televizyon ekranları, plazma ekran panelleri, vb.) kendiliğinden salınım yapar. Kendiliğinden salınımda bir atom minimum enerji ilkesine göre düşük enerji seviyesinde olmak ister ve daha düşük bir enerji seviyesine geçerken ışık biçiminde enerjisini açığa çıkarır. Kendiliğinden salınım olayında bir atomun bıraktığı elektromanyetik dalgalar arasında bir faz ilişkisi yoktur bir başka deyişle yayılma gelişigüzel bir şekilde olmaktadır.
Uyarılmış salınım;
Bir elektronu üst enerji seviyelerinden birine çıkmış atoma uyarılmış atom denir. Bu uyarılmış atomlar ışık biçiminde enerjilerini bırakmak için tetiklenirler. Tetikleme,
Üretilmiş foton Elektron sıçraması
başka bir ifadeyle bir atomu temel enerji seviyesinden daha yüksek bir enerji seviyesine çıkarma farklı yöntemlerle yapılabilmektedir. Bu yöntemlerden biride yukarıda bahsedildiği üzere atomu ışık demetine maruz bırakmaktır. Üzerine ışık düşürülmüş atom, enerjisini bırakmak ve kararlı duruma geçmek için ortama gelişi güzel fotonlar yayar. Bu işlemin madde içinde tüm atomlar tarafından gerçekleştiği düşünülürse düzensiz, ahenksiz bir yayılma olacaktır. Bu da istenmeyen bir durumdur. E2 uyarılmış durum enerjisi seviyesindeki bir atoma kendi frekansı ile aynı olan elektromanyetik dalga çarptığında bu atom E1 temel durumu enerji seviyesine geçecektir. Bu tip salınım ile çarpan her bir atoma karşılık iki foton bırakılır (Şekil 3.2).
Atom kendisine tam olarak uygun düşen bir ışık demeti ile uyarılmış ise çok kısa bir sürede yerleştirildiği ışık demeti ile aynı doğrultuda ve daha parlak bir ışık demeti şeklinde ışınır. Bu olaya uyarılmış salınım (Stimulated Emission) denir (Angelopoulou ve Wright, 1999; Çelen, 2006).
ġekil 3.2 Uyarılmış salınım ve oluşum şekilleri
ΔE =h*f= E2-E1 (3.1)
ΔE : Fotonun enerjisi
E2 : Yüksek seviyedeki (uyarılmış durum) enerji E1 : Son seviyedeki (düşük enerji durumu) enerji h : Plank sabiti (6,625*10-34 J.s)
3.2. Elektromanyetik IĢıma ve Elektromanyetik Dalgalar
Elektromanyetik ışın veya elektromanyetik radyasyon (EMR), atomlardan çıkan çeşitli enerji türlerini ve bunların dalga boyu olarak ifade eden yayılma özelliklerini ortaya koyan bir kavramdır ki bu kavram dalga boyu, frekans ve yoğunluk ile nitelendirilir. Işığın parçacık teoremine göre yukarı bahsedildiği üzere elektromanyetik ışımanın en küçük birimi fotondur. Fotonların kütlesiz olduğu ve boşlukta ışık hızında enerji paketleri şeklinde yayıldığı kabul edilir (URL2).
Elektromanyetik enerji, temel dalga teorisine göre yayılır. Bu teori, ışık hızında harmonik sinüzoidal bir şekilde yayılım yapan elektromanyetik enerji olarak tanımlanır (Aggarwal, 2004). Sinüzoidal yayılımı anlayabilmek için, dalga modelini incelemek gerekir. Bu dalgalar uzayda 2.99792458*108m/s ışık hızında sinüzoidal dalgalar halinde yol almaktadır. Elektromanyetik dalgaların elektriksel (E) ve manyetik güçleri (M) birbirine dik ve eş zamanlı olarak salınım yapar. Elektromanyetik dalgaların dalga boyunu ölçmek için kullanılan en küçük birim mikrondur. Sinüzoidal yayılımdaki hız, frekans ve dalga boyu parametreleri fotonun yayılımını açıklamaktadır (Şekil 3.3).
ġekil 3.3 Elektromanyetik dalganın karakteristiği (Aggarwal, 2004)
Görülebilir ışık için geçerli olan bütün fizik kuralları tüm elektromanyetik ışımalar için de geçerlidir.
Elektromanyetik ışımaların ortak özellikleri şunlardır; 1. Boşlukta düz bir doğrultuda yayılırlar.
3. Geçtikleri ortama; frekanslarıyla doğru orantılı, dalga boylarıyla ters orantılı olmak üzere enerji aktarırlar
4. Enerjileri; maddeyi geçerken, yutulma ve saçılma nedeniyle azalır, boşlukta ise uzaklığın karesiyle ters orantılı olarak azalır.
Hız; dalga boyu (λ) ile frekansın (f) çarpımına eşittir.
Elektromanyetik radyasyonların hızları, ışık hızına eşittir. Bu nedenle formül "c" (ışık hızı) ile gösterilmektedir.
c= λ*f
(3.2)
Boşlukta, belirli bir dalga boyundaki (λ) elektromanyetik enerjinin bu dalga boyu ile orantılı bir frekansı (f) ve foton enerjisi (E) bulunmaktadır. Bu yüzden elektromanyetik tayf bu üç değerden herhangi biri kullanılarak ifade edilebilir. Foton ışık hızı ile hareket eder ve enerjileri frekansları ile doğru orantılıdır. Değerler birbirine aşağıdaki formüller ile bağlıdır (URL2).
E= h*f (3.3)
Bu denklem daha önce (3.1) verilen denklemle birleştirilirse;
E= h*c/λ (3.4)
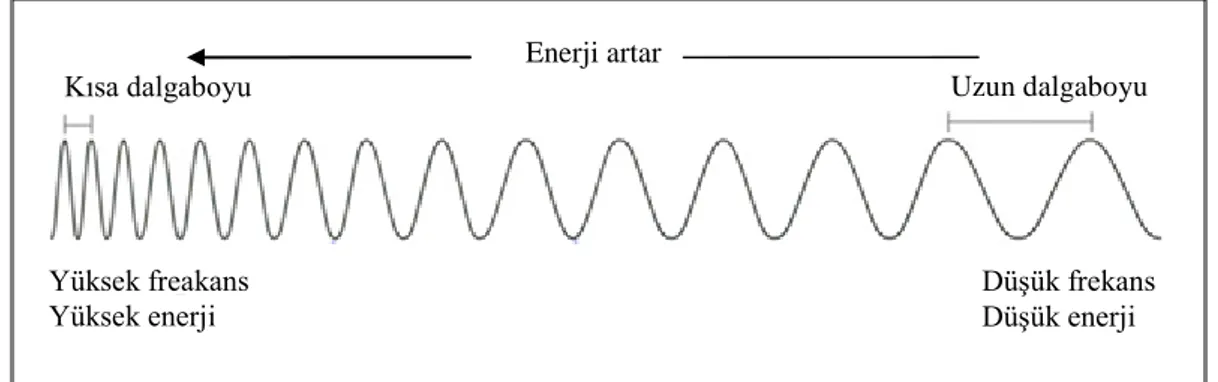
denklemi elde edilir. Buna göre;
Yüksek frekanslı elektromanyetik dalgalar yüksek enerjiye ancak kısa dalga boyuna,
Düşük frekanslı elektromanyetik dalgalar ise düşük enerjiye ancak uzun dalga boyuna sahiptirler (Şekil 3.4).
ġekil 3.4 Dalgaboyu enerji ilişkisi 3.3. Elektromanyetik Spektrum
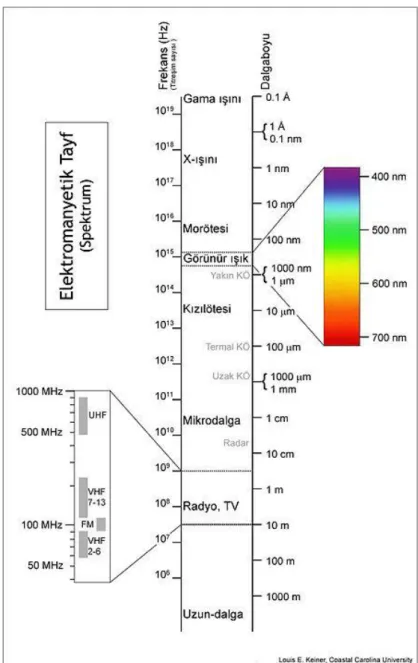
Elektromanyetik tayf veya elektromanyetik spektrum (EMS), evrenin herhangi bir yerinde fizik kurallarınca mümkün kılınan tüm elektromanyetik radyasyonu ve farklı ışınım türevlerinin dalga boyları veya frekanslarına göre bu tayftaki rölatif yerlerini ifade eden kavramdır. Herhangi bir cismin elektromanyetik tayfı veya spektrumu, o cisim tarafından çevresine yayılan karakteristik net elektromanyetik radyasyonu tabir eder. Elektromanyetik spektrum, dalga boylarına göre atom altı değerlerden başlayıp (Gama ışını veya X-ışını) binlerce kilometre uzunlukta olabilecek radyo dalgalarına kadar birçok farklı radyasyon tipini içerir. Bunlar düşük frekanstan yüksek frekansa doğru radyo dalgaları, mikrodalga, kızılötesi, görünür ışık, morötesi, X-ışınları ve Gama ışınlarıdır. Elektromanyetik spektrum kolaylık olması bakımından çeşitli bölgelere bölünmüşse de kesin bir sınır hiçbir zaman söz konusu değildir. Elektromanyetik spektrum, teoride sonsuz ve sürekli olsa da, pratikte kısa dalga boyu (yüksek frekans) ucunun limitinin Planck uzunluğuna, uzun dalga boyu (düşük frekans) ucunun limitinin ise evrenin tümünün fiziksel büyüklüğüne eşit olduğu düşünülmektedir (Ekercin, 2007; URL3).
Enerji artar
Uzun dalgaboyu Kısa dalgaboyu
Yüksek freakans
ġekil 3.5 Elektromanyetik spektrum ve spektral aralıklar
Dalga boyu birimleri
1µm = 10-6 m; 1 nm = 10-9 m 1 Ao = 10-10 m;
Radyo Dalgaları, yaklaşık 1mm den binlerce kilometreye kadar uzanan dalga boyları ile elektromanyetik spektrumun en geniş bölümünü oluştururlar. Radyo dalgaları el telsizlerinden gelişmiş uzay haberleşme sistemlerine kadar birçok platform tarafından kullanılmaktadır.
Mikrodalga, uzaktan algılamanın ilgi sahasına giren mikrodalga enerji bölgesi, elektromanyetik spektrumun 1mm-1m dalga uzunluğunda yer almaktadır. Bu bölge kendi içinde farklı gereksimler için kullanılan 6 bant içermektedir.
Kızılötesi ıĢın, dalga boyu 0.7μm-1mm arasında yer alır. Nesnelerin oldukça geniş bir spektrumda kızılötesi ışınım yayması sebebiyle sadece belirli bant genişliklerini algılayabilen algılayıcılar için geliştirilmiştir. Farklı analizleri gerçekleştirebilmek için Uluslararası Aydınlatma Komisyonu (CIE) kızılötesi bandı daha küçük alt-bantlara ayırmıştır. Şekil 3.5' de belirtildiği gibi bu bantlar; yakın kızılötesi, termal kızılötesi ve uzak kızılötesidir.
Görünür ıĢık, elektromanyetik spektrumun algılayabileceğimiz bölümü olan görünür ışık, spektrumun çok dar bir bölümünü oluşturur. Görünür ışık insan gözünün ışık veya renk olarak algıladığı aralığa denk gelen elektromanyetik enerjidir. Elektromanyetik spektrumun bu dar bandı, aynı zamanda güneşin ışıma eğrisinin maksimumuna yakın değerlere denk gelen 400nm (mor) ve 700nm (kırmızı) arasında yer almaktadır (şekil 3.6) (Akkartal, 2007; Liew, 2002)
ġekil 3.6 Elektromanyetik spektrumun görülebilir dalga boyları
Morötesi (UV), ışınlarının dalga boyları 10nm' den 400nm' ye kadar değişen değerler alabilmektedir. Dünya' ya güneşten gelen UV radyasyonunun büyük bir kısmı yüzeye ulaşmadan önce atmosferdeki ozon tabakası tarafından emilir.
X-ıĢınları, 0.1nm ile 10nm arasında dalga boyuna sahip ışınlardır. Morötesi ışınlardan daha kısa dalga boyuna dolayısı ile daha yüksek frekans ve enerjiye sahiptir. Çeşitli materyallerin içinden geçebildikleri için tıpta organ ve kemiklerin görüntülenmesinde sıkça kullanıldığı gibi, ayrıca yüksek-enerji fizik ve gökbilim uygulamalarında da kullanım alanı bulmuştur.
Gama ıĢınları, 0.1nm' den daha küçük dalga boylu ışınlardır. Elektromanyetik spektrumun en yüksek enerjili ve frekanslı bölgesinde gama ışınları yer alır.
3.3.1. Elektromanyetik dalgaların madde ile etkileĢimi
Lazer uygulamaları ışığın çeşitli cisimlerle etkileşimi ile yakından ilişkisi olan bir uzaktan algılama tekniğidir. Kaynağına bakılmaksızın uzaktan algılayıcılar tarafından algılanan bütün ışınım atmosferde belirli bir yol kat eder. Elektromanyetik enerji katı, sıvı veya gaz halindeki cisimle temasta şiddet, doğrultu, dalga uzunluğu, polarizasyon ve faz gibi bakımlardan birçok değişikliğe uğrar (Örmeci, 1987). Elektro manyetik dalgaların madde ile etkileşimi iki şekilde meydana gelmektedir.
a) Yeryüzü ile etkileĢim: Yeryüzünden yansıyan veya neşredilen ışınım miktarı ve ışınım özellikleri, yeryüzündeki objenin özelliklerine bağlıdır.
b) Atmosfer ile etkileĢim: Elektromanyetik enerji atmosferden geçerken çeşitli etkilerle saçılma ve bozulmaya uğrar (Ekercin, 2007).
Yeryüzü ile etkileşimde bir cisme ulaşan enerji yansıtılır, yutulur (soğurma) ve geçirilir. Enerjinin kaybolmayacağı ancak şekil değiştireceği göz önüne alınarak cisme gelen toplam enerji cisim yüzeyi tarafından yansıtılan, cisim tarafından geçirilen ve yutulan enerjilerin toplamına eşittir. Yansıtma, yutulma ve geçirilme özellikleri cisimlerin fiziksel özelliklerine ve gelen ışınımın dalga uzunluğuna bağlıdır (Örmeci, 1987).
Yansıma, gelen ışığın maddeye çarptıktan sonra yoluna yön değiştirerek devam
etmesi şeklinde ifade edilebilir. Yansıma olayı yüzeyin geometrik şekli ile ilişkili olarak 5 farklı kategoride incelenir.
Ayna yansıma Yarı ayna yansıma Lambertian yansıma Yarı Lambertian yansıma Kompleks yansıma
Ayna yansıma adından da anlaşılacağı gibi yüzeye gelen ışığın geliş açısına eşit bir dönüş açısı yaptığı yansımadır. Yarı ayna yansımada dönen ışık bir miktar dağılır. Lambertian yansıma ışığın eşit şekilde dağılmasıdır. Yarı Lambertian yansıma ise ışığın geliş açısına bağlı bir bozulma görülür. Kompleks yansımada ise ışık değişik açılarda değişik oranlarda yansımaya uğrar.
Soğurma, ışığın madde üzerine düşerek enerjisinin emilmesi olayına soğurulma
denir. Fizikte elektromanyetik ışınımın soğrulması, bir fotonun enerjisinin madde -atomun elektronları tarafından alınması olarak ele alınır. Böylece bu elektromanyetik enerji, enerjinin bir başka biçimi olan ısıya dönüşür. Elektromanyetik dalga yayılımı esnasında ışığın soğrulmasına genellikle zayıflama denir.
Atmosferle ile etkileşimde ise elektromanyetik enerji saçılmaya maruz kalır. Atmosferdeki gaz molekülleri, buhar, toz, yağmur damlaları, duman, sis gibi aerosol adı verdiğimiz askıda maddeler elektromanyetik ışınımın saçılmasına neden olmaktadır.
Saçılma, ışığın atmosferden geçerken molekül ve parçacıklara çarparak yön
değiştirmesi olarak ifade edilebilir. Detektörlerimiz, bilgi edinmek ya da ölçüm yapmak istediğimiz objelerden elektromanyetik dalgaları toplarken buna ek olarak, obje ile ilgisi olmayan, atmosferde saçılıma uğramış dalgaları da okuyacaktır. Fazladan gelen fotonlar bazı durumlarda almak istediğimiz bilgiyi baskılayacağından elde edilecek bilginin kalitesini düşürebilir ya da tamamen yok edebilir. Bilgi kayıplarını engellemek için atmosferik saçılmalar dikkatle incelenmelidir. Saçılma, moleküllerin ya da parçacıkların boyutları ile ilgili olduğu kadar kullanılan dalganın frekansı ile de ilgilidir. Tüm bu sebeplerden dolayı ölçüm atmosfer koşullarına ve kullanılan aletlere bağlı olarak planlanmalıdır (Çetinkaya, 2006). Atmosferik saçılma sadece görünür ve yakın kızıl ötesi bölgelerinde önemlidir (Akkartal, 2007). Atmosferde, "Rayleigh", "Mie" ve "Seçmesiz Saçılma" olarak adlandırılan üç tür saçılım gerçekleşmektedir. Rayleigh saçılması, atmosferin üst kısımlarında yayılan enerjinin kendi dalga boyuna göre daha küçük olan gaz molekülleri ile karşılaşması ile meydana gelen saçılma tipidir. Gökyüzünün mavi renkte görünmesinin nedeni Rayleigh saçılmasıdır. Mie saçılması, yayılan enerjinin dalga boyu hemen hemen aynı ebatlardaki duman, su buharı, toz, sis gibi askıdaki maddelerde karşılaştığında meydana gelen saçılma tipidir. Uzun dalga boylarını etkileyen bu saçılım atmosferin alt kısımlarında meydana gelir. Yayılan enerji, dalga boyundan daha büyük partiküllerle karşılaştığı zaman meydana gelen saçılma tipi ise seçmesiz saçılmadır. Su damlaları ve büyük toz parçaları bu tip dağılmaya neden olmaktadır.
ġekil 3.7 : Atmosferik saçılma - (a) Rayleigh saçılması, (b) Mie saçılması
(c) Seçmesiz saçılım (Akkartal, 2007)
3.4. Lazer Teknolojisinin Tarihi GeliĢimi
Lazer İngilizce de; Light Amplification by Stimulated Emission of Radiation (uyarılmış radyasyon salınımlarıyla ışığın kuvvetlendirilmesi) cümlesindeki kelimelerin baş harflerinin kısaltılmasından türetilmiş bir kelimedir. Lazer olarak ifade ettiğimiz bu optik kaynak aslında atom veya moleküllerin enerji düzeyleri arasındaki elektron geçişleridir. Lazer ışınının en büyük özelliği dağılmaz olması ve yön verilebilmesidir. Bu özelliğinden faydalanılarak mesafe ölçme ve fiber optik teknolojisi geliştirilmiştir.
Bugün farklı disiplinler tarafından birçok uygulamada kullanılan lazer teknolojisinin ilk çıkış noktası 1916 yılında Albert Einstein’ ın ortaya koymuş olduğu ışığın yayılma teorisine dayanmaktadır. Charles Townes 1951 yılında Kolombiya üniversitesinde Microwave Amplification of Stimulated Emission of Radiation (MAZER) keşfederek uyarılmış ışımaya dayanan ilk alet ile 1964 Nobel ödülünü kazanmıştır. Lazer taramanın tarihi geçmişi 1958 yılında Charles Townes ve Arthur Schawlow isimli iki bilim adamının çok büyük mesafelerde tam olarak yönlendirilmiş çok yoğun, tek renkli, dar, olası bir ışın seyahatinin varlığını ileri sürmesi ve ilk lazer
keşfi ile başlamaktadır (Heritage ve Large, 2009; Price ve Uren, 1989). Bu konu ile ilgili ilk ayrıntılı makale olan “Optik MAZER” 1958 yılında literatüre girmiştir. Bu gelişme ile ilk katı-hal yakut (ruby) lazeri Theodere Maiman tarafından 1960 yılında geliştirilmiştir. İlk lazer mesafe ölçme cihazı ise 1966 yılında geliştirilmiş ve ticari olarak ilk lazer 1971 yılından itibaren satışa sunularak mühendislik uygulamaları ve inşaat sektöründe kullanılmaya başlamıştır (Silfwast, 2004; Heritage ve Large, 2009). 3.5. Lazer IĢınının Özellikleri
Lazer ışığını herhangi bir ışıktan ayıran farklı özellikler vardır. Normal ışık, dalga boyları muhtelif, rengârenk, bir başka deyişle farklı faz ve frekansa sahip dalgalardan meydana gelir. Bu ışık bir obje yüzeyine çarptığında, elektromanyetik radyasyon (ışınım) çarptığı yüzeyden nispeten belli bir oranda yansıyarak gelişigüzel yönlerde dağılır. Lazer ışığı ise yüksek genlikli, aynı fazda, birbirine paralel, tek renkli, hemen hemen aynı frekanslı dalgalardan ibarettir. Bir lazer ışını veya sinyali lazer cihazından çıktıktan sonra her ne kadar paralel dalgalar halinde dağılmadan hareket etsede ulaştığı yüzeyi aydınlatabilmek için çarptığı yüzeyde dairesel veya eliptik olarak dağılacaktır. Lazer ışının objeye olan mesafesi arttıkça lazer ışının çapı daha da büyüyecektir. Lazer sinyalinin çarptığı yüzey şekil bakımından düzensiz bir yapıda ise dönen sinyal, lazer ışının tarafından aydınlatılan dairesel veya eliptik alan içerisinde meydana gelen yansımanın karışımı şeklinde olacaktır (Petrie ve Toth, 2008).
Lazer ışınını normal ışığa göre üstün kılan bu özellikleri aşağıda belirtildiği şekilde sıralayabiliriz;
Tek renklilik (Monochromatic) Uyumluluk (Coherence) Iraksama (Divergence) Yoğunluk (Intensity)
Yönlendirilebilirlik (Directionality) Yansıma (Reflectance)
3.5.1. Tek renklilik (Monochromatic)
Bir grup fotonun tek bir frekansa sahip olması özelliğine tek renklilik denir. Lazer ışının en belirgin özelliği tek renkli olmasıdır. Tek renkliliğin derecesi nicel
olarak dalga boyu bant genişliğine veya frekans bant genişliğine göre tanımlanabilir. Bir kaynaktan gelen tek renklilik derecesi, kırınım ağında gözlenen bir spektral çizginin frekansa bağlı genişliği Δν, buna paralel olarak kaynağın çizgi genişliği dalga boyuna bağlı olarak Δλ ile tanımlanır. Bu iki genişlik arasındaki ilişki; c=λ*ν ifadesi yardımı ile ortaya konur.
3.5.2. Uyumluluk (Coherence)
Frekansı, fazı ve doğrultusu birbiriyle aynı olan iki dalga uyumlu dalga olarak tanımlanır. Uyumlu olan tüm dalgalar sinüzoidal olup belirli bir genliğe ve dalga boyuna sahiptir (Çolpan, 2008). Şekil 3.8' de belirtildiği üzere ışık kaynağından çıkan normal ışık çok renkli, farklı faz ve frekanslarda kısa mesafelere ulaşırken, bir lazer ışını ışık kaynağından çıktığı andan itibaren tek renkli, aynı frekanslı, birbirine paralel dalgalar halinde hiç dağılmadan çok uzak mesafelere ulaşır (Şekil 3.9).
ġekil 3.8 Normal ışığın dağılımı (uyumsuz) ġekil 3.9 Lazer ışının dağılımı (uyumlu) 3.5.3. Iraksama (Divergence)
Gaussian demeti bir lazer kaynağı tarafından elde edilen en basit ve en arzu edilen ışın tipidir (Alda, 2003). Gaussian demeti için aşağıda belirtilen parametreler tanımlanmaktadır;
Genişlik (width) Iraksama (divergence) Eğrilik yarıçapı Rayleigh mesafesi
Demet geniĢliği veya spot size; optik bir yoğunluğun dağılım biçimi olan enine genişlik, Gaussian demetinin yarıçapı olarak tanımlanır. Gaussian genişliği ve yarı maksimum güçteki tam genişlik (FWHM) tanımlaması şekil 3.10 gösterildiği gibidir.
ġekil 3.10 Bir Gaussian demetinin enerji dağılımı
Teorik olarak demetin çapı sonsuzdur. Çünkü demetin ışık şiddetini veren formül ancak sonsuzda mutlak sıfıra ulaşır. Fakat bu hiçbir uygulamada kullanılamayacak anlamsız bir ifadedir. Pratikte bir demet çapı belirlemek gerekir. Bunun için uygulamalarda çeşitli rakamlar alınır. Teorik olarak demet çapından bahsedildiğinde ise bu rakam demetin şiddetinin 1/e2
ye kadar düştüğü noktadır. Bu da yüzde olarak ifade edilirse yaklaşık %13,5'e denk gelir. Teorikte her ne kadar demet çapı %13,5 alınsa da bu rakamın ölçümü oldukça zor olacağından lazer kataloglarında geçen çap genelde %50 olup optik tasarımlarda alınması gereken çap ise tasarımın özelliklerine göre yüzde bir ya da iki mertebesine kadar inebilir (Çetinkaya, 2006).
Gaussian demet genişliği konusunda önemli bir diğer konu z yönü boyunca yayılım değişimini bilmektir. Burada, w0; ışın demeti belinin yarıçapı, λ; lazer dalga boyu ve tarayıcıdan olan mesafe R olduğu zaman, genleşmemiş demetin yarıçapı w(Z) aşağıda verilen eşitlik ile elde edilir (Alda, 2003; Reshetyuk, 2006; Pesci ve ark., 2011).
w(Z)= w0√ (
) (3.5)
ġekil 3.11 Gaussian ışın demeti beli (URL4)
Iraksama; lazer demetinin sonsuzluğa doğru yayılması olarak tanımlanır. (3.5) eşitliği R sonsuza giderse demet genişliği formülü (3.6)' da belirtildiği gibi olur.
= (3.6)
Formülde belirtilen parametreler Gaussian demetinin ıraksaması olarak adlandırılır. (3.6) eşitliğinde ıraksama ve demet genişliği parametrelerinin birbirleri ile ters orantılı olduğu gözükmektedir. Bir başka ifadeyle demet genişliği arttıkça ıraksama azalmakta ya da demet genişliği azaldıkça ıraksama değeri artmaktadır. Kullanılan bu ilişkiden iyi bir kolimasyonun (ıraksama değerinin çok düşük olması), Gaussian demeti genişledikçe elde edilebileceği sonucuna varılabilir (Alda, 2003).
Eğrilik yarıçapı; dalga önü ile ilişkili eğriliği açıklar. Dalga önü aynı faza sahip noktaların bir çizgi, bir yüzey veya bir dalga biçiminde 3B yayılımının meydana getirdiği yüzeydir (URL5). Elektromanyetik dalganın aldığı yol R sonsuza gitme eğilimindeyken dalga tamamen düzlemseldir. Lazer demeti doğrusal olarak genişlemek yerine Şekil 3.12(a) 'da görüldüğü gibi kırınımın etkisiyle yay çizerek genişleyen bir hareket sergiler (Alda, 2003; Çetinkaya, 2006).
Rayleigh mesafesi; dalga yarıçapının minimum olduğu noktadır. Demetin en ince olduğu noktada dalga tam olarak düzlemseldir. Demet ilerledikçe dalga önü bükülerek Rayleigh mesafesinde maksimum eğime ulaşır. Daha sonra tekrar düzlemsel hale yaklaşarak ilerler ve sonsuzda tamamen düzlemsel bir dalga önü görülür (Çetinkaya, 2006). Lazer demetinin ilerlemesi ve demet dalga yüzeyi dağılımı Şekil 3.12' de gösterildiği gibidir.
(a) (b)
ġekil 3.12 (a) Lazer demeti ilerlemesi, (b) Lazer demeti dalga yüzeyi dağılımı (Çetinkaya, 2006) 3.5.4. Yoğunluk (Intensity)
Yoğunluk, geri yansıyan optik gücün güçlendirilmesi ve dönüştürülmesi ile elde edilen elektronik sinyal gücünün ölçülmesidir (Pfeifer ve ark., 2007). Yansıyan sinyalin gücü objenin fiziksel özelliklerine ve kullanılan tarayıcının geometrik durumuna bağlıdır. Ayna yansıma, dağınık yansıma gibi objenin geometrik özellikleri, soğurulma ve iletim bu geri yansımanın gücünü etkiler (Peifer ve ark., 2008). Mesafe, ışın geliş açısı, yüzeyin elektromanyetik enerjiyi yansıtma kapasitesi ve yüzey pürüzlülüğü lazer yoğunluğunu etkileyen faktörler arasındadır (Hancock, 1999). Yansıma yoğunluğunu etkileyen diğer bir faktör ise obje yüzeyinin nemidir. Çünkü uzun menzilli yersel lazer tarayıcılar genellikle elektromanyetik spektrumun yakın kızıl ötesi bandında çalışır ve yüzeyin nemi kızıl ötesi yansımayı değiştirebilir (Pesci ve Teza, 2008; Kurazume ve ark., 2002). Literatürde yansıma yoğunluk verisini etkileyen faktörler üzerine pek çok çalışma yapılmıştır. Pesci ve Teza (2008) yüzey düzensizliklerinin yoğunluk verileri üzerine etkisini belirlemek amacıyla, aynı gözlem platformunun farklı açı ve farklı mesafeler kullanılarak test edildiği çalışma literatürdeki örneklerden biridir.
Yersel lazer tarayıcılar için yoğunluk, 3B konum bilgisine ilave olarak ekstra bir değişken olarak kayıt edilmektedir. Mevcut ticari sistemler tarafından sunulan yoğunluk verileri 8-bit, 12-bit veya 16-bit gri tonlu yansıma değerleridir. Örneklemek gerekirse 1535nm dalga boylu lazer sinyalleri yayan OPTECH ILRIS 3D yersel lazer tarayıcı tarafından ölçülen lazer ışınları 16-bit yansıma değerindedir. ILRIS 3D gri (IG) ve ham (IR) olmak üzere iki tür yansıma yoğunluğu üretir. Her birinin formatı 8-bit olmak üzere, piksel dijital değerleri gri format için 0-255 arasında bir gri renk tonuna karşılık gelirken, ham format için 0-25500 arasında bir değer alır. Her bir pikselin karşılık
geldiği nümerik değere DN (digital number) adı verilir. Bir görüntüleme sisteminin radyometri çözünürlüğü o görüntüye karşılık gelen gri ton değeri ile ilişkilidir.
Bir yersel lazer tarayıcı tarafından üretilen nokta bulutlarının 16-bit ham yoğunluk verileri fonksiyon olarak aşağıda belirtildiği gibi ifade edilir;
,( ( )) - (3.7)
Burada, I ( ) k. nokta ile ilişkili olan yoğunluktur. N, elde edilen nokta sayısıdır (genellikle N, 105
-106 kadardır). Şu anda mevcut yersel lazer veri işleme yazılım paketleri genellikle nokta bulutları ile çalışmaktadır.
Bu nokta bulutlarını aşağıdaki fonksiyonla gösterirsek;
,( ( )) - (3.8)
Burada, In [0-255] aralığında bir değere normalize edilmiş yoğunluktur. In, monokromatik (tek renkli) bir görüntüde 8-bit renk derinliğinde dijital bir değer olarak ifade edilir. Ne yoğunluğun etkin bir biçimde belirlenebildiği yerdeki nokta sayısıdır. I' den başlamak üzere In hesaplamak için kullanılan algoritmalar objeye olan mesafeyi dikkate alır, nokta bulutu kümesi içerisinde belirsiz sinyalleri büyüterek onları daha iyi görünür hale getirir. Bu detaylandırmalar sonunda minimum ve maksimum yoğunluklara karşılık gelen 0 ile 255 arasındaki değerler nokta bulutu kümeleri içinde saptanır. Böylece aynı yansımaya sahip objeyi temsil eden noktalar, aynı tarama alanında farklı mesafelerde elde edilir (Pesci ve Teza, 2008).
3.5.5. Yönlendirilebilirlik (Directionality)
Günlük hayatta kullandığımız tüm ışık kaynakları her yöne ışık yaymaktadır. Lazer ışının tek bir ışın olarak dağılmadan yol alabilmesi özelliği bu ışını istenilen doğrultuda ve mesafede yönlendirilebilir yapmaktadır. Lazer ışının bu özelliğinden faydalanılarak mesafe ölçme ve fiber optik teknolojisi geliştirilmiştir. Lazer ışınları uygun şartlar altında oldukça uzun mesafeler kat edebilir.
3.5.6. Yansıma (Reflectance)
Yansıma yansıyan ışın gücü ile anlık ışıma gücü ,(gelen ışıma gücü), arasındaki
ilişki olarak tanımlanır (Ingensand ve ark., 2003). Dolayısıyla biçimsel olarak yansıma, yüzeye özgü anlık ışımanın yüzeyden yansıyan ışımaya oranı olarak ifade edilebilir (Petrie ve Toth, 2008). Yansıma aşağıda belirtilen faktörlerin fonksiyonudur (Reshetyuk, 2006; Lichti ve Harvey, 2002; Ingensand, 2006);
Nesnenin maddesel özelliği,-elektrik iletkenliği, manyetik geçirgenlik Yüzey rengi
Lazerin dalga boyu
Lazer ışının geliş açısı (Ingensand, 2006) Yüzey pürüzlülüğü
Polarizasyon Yüzey ısısı Yüzeyin nemi
Yansıyan lazer yoğunluğu ve yüzey yansıması arasında genellikle Lambertian yansıma modeli olarak tanımlanan bir ilişki vardır (Reshetyuk, 2006; Hancock, 1999). Bu ilişki aşağıda belirtilen eşitlik ile ifade edilir.
I
(3.9)I yansıtılan lazer ışının yoğunluğu, yüzeyin yansıma katsayısı (0 ≤ ≤1), ışın geliş açısı ve R objeye olan mesafedir. Lambertian modeli, yüzey yansımasını tanımlamak için oldukça yeterlidir. Hancock ve ark. (1998) lazer yansıma modelini şu şekilde ifade etmişlerdir; lazer ışının düşey bir objenin dik köşesine çarptığı varsayılırsa açısının 0-45 derece arasında olması gerekir. Ancak, yatay yüzeyler için mesafe 20m 'den fazla ise açısının 87-90 derece arasında olması gerekir. Ek olarak, Şekil 3.13' de gösterildiği gibi lazer sensörü araç üzerinde h yüksekliğine yerleştirilmişse ve lazer ışını p yüksekliğindeki bir engele çarparsa;
ġekil 3.13 Araç üzerine yerleştirilmiş sensör ve lazer ışının çarptığı p engel noktası
(3.10)
I
engel
(3.11)
Bir nesnenin yansıtıcı özelliği lazer tarafından yayılan ışınımın dalga boyu ile ilişkilidir. Uygulamada, bu özellikleri elde etmek çoğu kez zordur çünkü yansıma ve saçılma konusunda yayınlanan bilgilerin çoğu uzaktan algılama yöntemi ile elde edilmektedir. Yansıma hakkında rapor edilen bu bilgilerin çoğu güneşten gelen ışımalardır ve doğada uyumsuz ışımalar olarak ifade edilir. Işın, belirli bir dalga boyunda lazer ışını yayan uyumlu bir kaynaktan geliyorsa yansıma çok farklı olabilir. Çizelge 3.1 Reigl marka yersel lazer tarayıcısının dalga boyu 900nm olan lazer ışınları için çeşitlimateryallerin yansıtırlığı hakkında bilgi vermektedir.
Çizelge 3.1 Çeşitli materyallerin 900nm dalga boyu için yansıtırlığı (Wehr ve Lohr, 1999;Petrie ve Toth, 2008
Materyal Yansıtırlık (%)
Ağaç (kereste) 94
Kar 80-90
Beyaz duvar 85
Kireçtaşı, kil 75 den fazla Yapraklarını döken ağaç 60
Kozalaklı ağaç 30
Karbonat kum (kuru/ıslak) 57/41
Kumsal; çöl kumu 50
Kaba ahşap palet 25
Çakıl taşlı asfalt 17
Lav 8