FEN BĠLĠMLERĠ ENSTĠTÜSÜ
STATĠK SENKRON SERĠ KOMPANSATÖR ĠÇĠN KASKAD
YAPILI OPTĠMAL KONTROLÖR TASARIMI
Yavuz GÜLER
YÜKSEK LĠSANS TEZĠ
ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ
DĠYARBAKIR EYLÜL 2016
T.C.
DĠCLE ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
STATĠK SENKRON SERĠ KOMPANSATÖR ĠÇĠN KASKAD
YAPILI OPTĠMAL KONTROLÖR TASARIMI
Yavuz GÜLER
YÜKSEK LĠSANS TEZĠ
ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ BÖLÜMÜ
DĠYARBAKIR EYLÜL 2016
T.C. DĠCLE ÜNĠVERSĠTESĠ
FEN BĠLĠMLERĠ ENSTĠTÜSÜ MÜDÜRLÜĞÜ DĠYARBAKIR
Yavuz GÜLER tarafından yapılan “Statik Senkron Seri Kompansatör Ġçin Kaskad Yapılı Optimal Kontrolör Tasarımı” konulu bu çalıĢma, jürimiz tarafından Elektrik-Elektronik Mühendisliği Anabilim Dalında YÜKSEK LĠSANS tezi olarak kabul edilmiĢtir.
Jüri Üyeleri
BaĢkan : Yrd. Doç. Dr. Bilal GÜMÜġ
Üye : Yrd. Doç. Dr. Mustafa NALBANTOĞLU Üye : Yrd. Doç. Dr. Musa YILMAZ
Tez Savunma Sınavı Tarihi: 29 / 08 / 2016
Yukarıdaki bilgilerin doğruluğunu onaylarım. .../.../2016
Doç.Dr. Sevtap SÜMER EKER
I TEġEKKÜR
Bu tezin hazırlanmasında, kıymetli zamanını ve bilgisini benden esirgemeyen çalıĢma azmi ile benim çalıĢmama yardımcı olan çok değerli hocam Sayın Yrd. Doç. Dr. Mustafa NALBANTOĞLU‟ na teĢekkürlerimi sunarım.
Tez çalıĢması süresince bana her zaman destek olan sevgili eĢime ve öğrenim hayatım boyunca maddi ve manevi desteklerini benden esirgemeyen sevgili babam ve annem baĢta olmak üzere aileme sonsuz teĢekkür ederim.
II ĠÇĠNDEKĠLER Sayfa TEġEKKÜR………. I ĠÇĠNDEKĠLER………... II ÖZET………... V ABSTRACT………... VI ÇĠZELGE LĠSTESĠ………... VII ġEKĠL LĠSTESĠ………... VIII KISALTMA VE SĠMGELER………. XI
1. GĠRĠġ………... 1
1.1. Tezin Yapısı ve ÇalıĢması……….………... 3
2. ÖNCEKĠ ÇALIġMALAR………...………... 5
3. MATERYAL VE METOT ……….…... 9
3.1. Esnek Alternatif Akım Ġletim Sistemleri (Facts)………. 9
3.1.1. Paralel Bağlı Facts Denetleyicileri………..…….………... 14
3.1.1.1. SVC (Statik Var Kompansatör).……….. 14
3.1.1.2. STATCOM (Statik Senkron Kompansatör)……….... 15
3.1.2. Seri Bağlı Facts Denetleyicileri……….………... 18
3.1.2.1. SSSC (Statik Senkron Seri Kompansatör)………... 18
- SSSC‟nin Temel Denetimi………...……….. 23
3.1.2.2. TCSC (Tristör Kontrollü Seri Kompansatör)………..……… 26
3.1.3. BirleĢtirilmiĢ Seri ve Paralel Bağlı Facts Denetleyicileri………...………. 28
3.1.3.1. UPFC (BirleĢtirilmiĢ Güç AkıĢ Denetleyicisi)………….………... 28
3.1.3.2. Tristör Denetimli Faz Kaydırıcılı Transformatör………... 30
3.1.4. Gerilim Düzenleyici Facts Denetleyicileri………...……… 31
3.1.4.1. TCVR (Tristör Denetimli Gerilim Düzenleyici).………... 31
3.1.4.2. TCVL (Tristör Denetimli Gerilim Sınırlayıcı)..………... 31
3.2. Genetik Algoritma (GA)………..……….... 32
III
3.2.1.1. BaĢlangıç Popülasyonunun OluĢturulması…….….……….... 36
3.2.1.2. Uygunluk Fonksiyonunun Hesaplanması……….…….... 37
3.2.2. Kodlama Yöntemi ………..…….………….………. 39
3.2.2.1. Ġkili (Binary) Kodlama……….……….………. 39
3.2.2.2. Permütasyon (Sıralı) Kodlama………... 39
3.2.2.3. Gerçel (Reel) Kodlama……….……….. 39
3.2.2.4. Ağaç Kodlama……….………... 40
3.2.3. Genetik Algoritmanın Operatörleri……… 40
3.2.3.1. Elitizim……….. 41
3.2.3.2. Seçim……….……… 41
- Rulet Çarkı Seçimi.……….. 41
- Turnuva Seçimi.………..………….……….... 42
- Sıralı Seçimi.………... 43
3.2.4. Çaprazlama (Crossover)…………..……… 43
3.2.4.1. Tek Noktalı Çaprazlama……….……….... 43
3.2.4.2. Ġki Noktalı Çaprazlama………...……….... 44
3.2.4.3. Çok Noktalı Çaprazlama……….……….... 44
3.2.4.4. Düzgün Çaprazlama……….………….……….. 45
3.2.5. Mutasyon (Mutation)……….……….……….... 45
3.2.6. Genetik Algoritmayı Sonlandırma ġartları………... 46
3.2.7. Genetik Algoritmada Parametre Seçimi..………... 47
3.2.7.1 Popülasyon Büyüklüğü (N)………... 47
3.2.7.2. Çaprazlama Oranı (Pc)....………..………... 47
3.2.7.3. Mutasyon Oranı (Pm)……….….………... 47
3.3. Otomatik Kontrol Sistemi………...……….………..……… 48
3.3.1. PID Kontrolör Yapıları………... 48
3.3.1.1. P Kontrolör Yapısı……….. 49
3.3.1.2. I Kontrolör Yapısı……….. 50
IV
3.3.1.4. PID Kontrolör Yapısı………..………….………... 51
3.3.2. Kaskad Kontrol Sistemi………..……… 52
3.4. SSSC Ġçin Sönümleme Kontrolör Yapısı………... 56
4. ARAġTIRMA BULGULARI………... 59
4.1. Kaskad Kontrol Sisteminin DıĢ Döngü (PI) – Ġç Döngü (PI) Parametrelerinin Ayrı Ayrı Optimize Edilmesiyle Elde Edilen Sonuçlar………... 60
4.2. Kaskad Kontrol Sisteminin DıĢ Döngü (PID) – Ġç Döngü (PI) Parametrelerinin Ayrı Ayrı Optimize Edilmesiyle Elde Edilen Sonuçlar………... 61
4.3. PID-PI Kaskad Kontrolörlü Sistemin, Klasik PID Kontrol ve SSSC Ġçin Sönümleme Kontrolleri ile KarĢılaĢtırılması………...………... 67
5. TARTIġMA VE SONUÇ.………….………. 75
6. KAYNAKLAR…………..……….……… 77
EKLER………….……… 83
V
ÖZET
STATĠK SENKRON SERĠ KOMPANSATÖR ĠÇĠN KASKAD YAPILI OPTĠMAL KONTROLÖR TASARIMI
YÜKSEK LĠSANS TEZĠ Yavuz GÜLER DĠCLE ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
ELEKTRĠK-ELEKTRONĠK MÜHENDĠSLĠĞĠ ANABĠLĠM DALI 2016
Bu çalıĢmada, Statik Senkron Seri Kompansatör (SSSC) içeren sonsuz baraya bağlı tek makineli güç sisteminde kaskad kontrolör yapısı kullanılarak sistemin kararlılığının iyileĢtirilmesi amaçlanmıĢtır. SSSC güç sistemine seri bağlanan bir Esnek Alternatif Akım Ġletim Sistemleri (FACTS) denetleyicisidir. FACTS denetleyicileri güç akıĢ kontrolünde ve sistemlerin geçici ve kalıcı kararlılığın iyileĢtirmede kullanılabilmektedir ve güç sistemi salınımları azaltılabilmektedir. Söz konusu denetleyiciler, ayrıca elektrik iletim maliyetini düĢürmekte, güç osilasyonlarını ve reaktif güç akıĢını azaltmakta ve bunun sonucunda hattın daha fazla aktif güç taĢınmasını sağlamaktadır.
Kontrol sistemlerinde sisteme herhangi bir bozucu geldiğinde bu sistemin bozucu karĢısında iyi bir performans göstermesi gerekir. Klasik kontrol sisteminin bir alternatifi olan Kaskad kontrol, özellikle öngörülmeyen bozucuların varlığında kontrol siteminin performansını artırmaktadır. Bu çalıĢmada SSSC içeren sonsuz baraya bağlı tek makineli güç sisteminde kaskad kontrol yapı kullanılarak sistemin kararlılığının iyileĢtirilmesi sağlanmıĢtır.
Bu çalıĢmada PI-PI ve PID-PI kontrolörler kaskad kontrol sisteminin dıĢ ve iç döngülerinde kullanılarak; kaskad kontrolörün hafif, orta ve ağır yük Ģartları altında diğer kontrolörler ile olan performansları karĢılaĢtırılmıĢtır. Optimize edilmiĢ olan değerler ile önerilen kaskad kontrolörden en iyi performansı gösteren kaskad kontrolör, SSSC‟nin kontrolü için literatürde önerilen salınım sönümleme kontrolörü ve klasik PID kontrol sistemleri ile karĢılaĢtırılmıĢtır.
Benzetim çalıĢması sonuçlarında SSSC‟nin kontrolü için önerilen kaskad kontrolörün, sönümleme kontrolü ve klasik PID kontrol sistemleri karĢısında daha üstün bir salınım sönümleme performansı sergilediği gözlemlenmiĢtir.
Anahtar Kelimeler: Güç Sistemleri, SSSC, Kaskad Kontrol, Genetik Algoritma, PID kontrolör.
VI
ABSTRACT
CASCADE BASED OPTIMAL CONTROLLER DESIGN FOR STATIC SYNCHRONOUS SERIES COMPENSATOR
MASTER THESIS Yavuz GÜLER DICLE UNIVERSITY
GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING
2016
In this study, the control of the system is ensured with Cascade Control structure over single machined power system connected to infinite bus bar including SSSC (Static Synchronous Series Compensator). SSSC is a FACTS controller that is connected in series to the power system. Flexible Alternating Current Transmission Systems (FACTS) controllers can be used in controlling power flow and improving temporary and permanent stability of the system. Also their power system emissions can be reduced. These controllers, reducing the cost of electricity transmission, also reduce power and reactive power flow oscillations and consequently provide more active power transport line.
In control systems, when a destructive comes to the system, it is necessary for the system to show a good performance towards that destructive. Being an alternative to conventional control system, Cascade Control increases the performance of the control system especially when there is an unpredictable destructive. In this study, the control of the system is ensured with Cascade Control structure over single machined power system connected to infinite bus bar including SSSC.
In this study, using PI –PI and PID- PI controllers in inner and outer loop of the cascade controller performance cascade of the controller was compared with other controller system, oscillation damping controller and conventional PID control, under light, normal and heavy load conditions. With optimized values, the cascade controller that shows the best performance of the proposed cascade controller is compared with oscillation damping controller and conventional PID control systems purposed in the literature to control SSSC.
As a result of this study, it was concluded that the cascade controller, proposed to control SSSC, showed better performance compared with oscillation damping controller and conventional PID control system to control SSSC.
VII
ÇĠZELGE LĠSTESĠ
Çizelge No Sayfa
Çizelge 3.1. DeğiĢkenlerin kodlanması ile bireyin elde edilmesi 37 Çizelge 3.2. Ġkili kodlama kullanılarak oluĢturulan bireyler 39 Çizelge 3.3. Permütasyon kodlama ile oluĢturulan kromozomlar 39
Çizelge 3.4. Gerçel kodlama ile oluĢturulan kromozomlar 40
Çizelge 3.5. Rulet çarkı için örnek hesaplama 42
Çizelge 3.6. Tek noktalı çaprazlama 44
Çizelge 3.7. Çift noktalı çaprazlama 44
Çizelge 3.8. Çok noktalı çaprazlama 45
Çizelge 3.9. Düzgün çaprazlama 45
Çizelge 3.10. Mutasyon örneği 46
Çizelge 4.1. PI-PI kaskad kontrolörün optimize edilen parametre değerleri ve
değiĢim aralığı 61
Çizelge 4.2. PID-PI kaskad kontrolörün optimize edilen parametre değerleri ve
değiĢim aralığı 61
Çizelge 4.3. Önerilen kaskad kontrolörlerin IAE performansları 67 Çizelge 4.4. Klasik PID kontrol sisteminin parametre değerleri 67 Çizelge 4.5. SSSC için sönümleme kontrollü sisteminin parametre değerleri 68 Çizelge 4.6. Önerilen PID-PI kaskad kontrolör ile karĢılaĢtırılan sistemlerin IAE
VIII ġEKĠL LĠSTESĠ
ġekil No Sayfa
ġekil 3.1. Enerji iletiminin temel gösterimi 10
ġekil 3.2. Güç sistemi: aktif güç-faz açısı iliĢkisi 11
ġekil 3.3. Paralel facts denetleyicisi 14
ġekil 3.4. SVC‟ nin içerinde bulunan temel yapılar 15
ġekil 3.5. SVC‟ nin genel yapısı 15
ġekil 3.6. Statcom‟ un genel yapısı 16
ġekil 3.7. Statcom devre modeli ve iletim hattı ile reaktif güç alıĢveriĢi için çalıĢma
modları 17
ġekil 3.8. Statcom‟ un Akım-Gerilim karekteristiği 17
ġekil 3.9. Seri facts denetleyicisi 18
ġekil 3.10. (a) SSSC‟ nin temel yapısı , (b) SSSC‟ nin eĢdeğer devresi 19 ġekil 3.11. SSSC‟de etkin ve tepkin güç alıĢveriĢi için değiĢik çalıĢma modları 19 ġekil 3.12. SSSC ile kompanze edilmiĢ bir hat ve SSSC‟nin içyapısı 20 ġekil 3.13. (a) SSSC‟ li güç sistemi devre Ģeması, (b) gerilime ait fazör diyagramı 21 ġekil 3.14. SSSC‟ nin tek hat diyagramı (a), fazör diyagramı (b) 22 ġekil 3.15. SSSC ile kompanze edilen hattın eklenen gerilime göre aktif güç değiĢimi 23
ġekil 3.16. Aktif ve Reaktif gücün δ ile değiĢimi 23
ġekil 3.17. Doğrudan denetimli SSSC nin denetim yapısı 24
ġekil 3.18. Dolaylı denetimli SSSC nin denetim yapısı 25
ġekil 3.19. TCSC‟nin temel devre bileĢenleri 26
ġekil 3.20. TCSC devre yapısı 27
ġekil 3.21. UPFC‟nin seri senkron gerilim kaynağı modeli 28
ġekil 3.22. Ġletim hattındaki transfer edilebilir gerçek güç alanı ve alıcı uç reaktif güç talebi 30 ġekil 3.23. Faz kaydırıcılı transformatör bağlantısı(a), ÇıkıĢ gerilimi fazör diyagramı (b) 31
IX
ġekil 3.25. Tristör denetimli gerilim sınırlayıcının genel yapısı 32
ġekil 3.26. Genetik Algoritmanın AkıĢ Diyagramı 36
ġekil 3.27. Ağaç kodlama ile oluĢturulan bir kromozom 40
ġekil 3.28. Uygunluk fonksiyonu değerlerine göre bireylerin seçilme ihtimallerinin rulet
çarkında gösterilmeleri 42
ġekil 3.29. Kontrolör ve sistemden oluĢmuĢ geri beslemeli yapı 48
ġekil 3.30. Kaskad kontrol yapı 53
ġekil 3.31. Kaskad kontrol yapı, SSSC ve güç sistemi gösterimi 54 ġekil 3.32. Simülasyon yapılan kaskad kontrolör tabanlı SSSC modeli 55 ġekil 3.33. Simülasyonu yapılan modelin PID-PI kaskad kontrolör bloğu 56
ġekil 3.34. SSSC için sönümleme kontrolü 57
ġekil 4.1. SSSC içeren sonsuz baraya bağlı bir makineli güç sistemi 60 ġekil 4.2. PI-PI ve PID-PI kontrolörlerin hafif yük durumu (Pref = 0.3 p.u) için rotor hız
sapmalarının karĢılaĢtırılması 62
ġekil 4.3. PI-PI ve PID-PI kontrolörlerin normal yük durumu (Pref = 0.75 p.u) için rotor
hız sapmalarının karĢılaĢtırılması 62
ġekil 4.4. PI-PI ve PID-PI kontrolörlerin ağır yük durumu (Pref = 1 p.u) için rotor hız
sapmalarının karĢılaĢtırılması 63
ġekil 4.5. PI-PI ve PID-PI kontrolörlerin hafif yük durumu (Pref = 0.3 p.u) için güç
sapmalarının karĢılaĢtırılması 63
ġekil 4.6. PI-PI ve PID-PI kontrolörlerin normal yük durumu (Pref = 0.75 p.u) için güç
sapmalarının karĢılaĢtırılması 64
ġekil 4.7. PI-PI ve PID-PI kontrolörlerin ağır yük durumu (Pref = 1 p.u) için güç
sapmalarının karĢılaĢtırılması 64
ġekil 4.8. PI-PI ve PID-PI kontrolörlerin hafif yük durumu (Pref = 0.3 p.u) için gerilim
değiĢimlerinin karĢılaĢtırılması 65
ġekil 4.9. PI-PI ve PID-PI kontrolörlerin normal yük durumu (Pref = 0.75 p.u) için
gerilim değiĢimlerinin karĢılaĢtırılması 65
ġekil 4.10. PI-PI ve PID-PI kontrolörlerin ağır yük durumu (Pref = 1 p.u) için gerilim
değiĢimlerinin karĢılaĢtırılması 66
X
ġekil 4.11. Yapılan modellemelerin, hafif yük durumu (Pref = 0.3 p.u) için rotor hız
sapmalarının karĢılaĢtırılması 68
ġekil 4.12. Yapılan modellemelerin, normal yük durumu (Pref = 0.75 p.u) için rotor hız
sapmalarının karĢılaĢtırılması 69
ġekil 4.13. Yapılan modellemelerin, ağır yük durumu (Pref = 1 p.u) için rotor hız
sapmalarının karĢılaĢtırılması 69
ġekil 4.14. Yapılan modellemelerin, hafif yük durumu (Pref = 0.3 p.u) için güç
sapmalarının karĢılaĢtırılması 70
ġekil 4.15. Yapılan modellemelerin, normal yük durumu (Pref = 0.75 p.u) için güç
sapmalarının karĢılaĢtırılması 70
ġekil 4.16. Yapılan modellemelerin, ağır yük durumu (Pref = 1 p.u) için güç sapmalarının
karĢılaĢtırılması 71
ġekil 4.17. Yapılan modellemelerin, hafif yük durumu (Pref = 0.3 p.u) için çıkıĢ gerilim
değiĢimlerinin karĢılaĢtırılması 71
ġekil 4.18. Yapılan modellemelerin, normal yük durumu (Pref = 0.75 p.u) için çıkıĢ
gerilim değiĢimlerinin karĢılaĢtırılması 72
ġekil 4.19. Yapılan modellemelerin, ağır yük durumu (Pref = 1 p.u) için çıkıĢ gerilim
XI
KISALTMA VE SĠMGELER
α : Tetikleme açısı
C : Hattın kapasitansı
C(s) : Kontrolörün laplace domeni gösterimi
D1 : DıĢ döngüdeki bozucu
D2 : Ġç döngüdeki bozucu
е : Hata sinyali
FACTS : Esnek alternatif akım iletim sistemi
f : Uygunluk fonksiyonu
GA : Genetik Algoritma
G(s) : Laplace domeni sistem transfer fonksiyonu Gc1 : Kaskadın ana denetleyicisi
Gc2 : Kaskadın ikinci denetleyicisi
I : Hat akımı
Iq : Statcom a.a tarafı akımı Idc : Statcom d.a tarafı akımı
i : Kompanzasyon durumundaki hat akımı
k : Seri kompanzasyon katsayısı
KB : Yükselme faktörü
L : Hattın endüktansı
P : Aktif güç
Peo : Güç sapması
Rx : Rezonans tetikleme açısı R(s) : Laplace domeni giriĢ gerilimi SSSC : Statik senkron seri kapasitör STATCOM : Statik Senkron Kompansatör SVC : Statik Var kompansatör
TCSC : Tristör kontrollü seri kompansatör TCVR : Tristör denetimli gerilim düzenleyici TCVL : Tristör denetimli gerilim sınırlayıcı TW : Yüksek geçiren filtre zaman sabiti T1 : Faz kompanzasyonu zaman sabiti T2 : Faz kompanzasyonu zaman sabiti
XII T3 : Faz kompanzasyonu zaman sabiti T4 : Faz kompanzasyonu zaman sabiti UPFC : BirleĢtirilmiĢ güç akıĢ denetleyicisi U1 : Gönderici uç gerilimi genliği
U2 : Alıcı uç gerilimi genliği V1 : Gönderici uç gerilimi genliği
V2 : Alıcı uç gerilimi genliği VS : Gönderici uç gerilimi genliği VR : Alıcı uç gerilimi genliği
Vdc : Statcom ve SSSC kapasiteleri gerilimi Vq : SSSC çıkıĢ gerilimi
Vqref : Ġstenilen SSSC çıkıĢ gerilimi
VqQref : Ġstenilen reaktif seri kompanzasyon gerilimi VqRref : Ġstenilen aktif seri kompanzasyon gerilimi Vdcref : Ġstenilen doğru akım gerilimi
Vpq : UPFC seri çıkıĢ gerilimi Y(s) : Laplace domeni çıkıĢ gerilimi X : Hattın eĢdeğer reaktansı XC : Kondansatör reaktansı XL : Bobin reaktansı
XS : Statcom bağlantı transformatörünün reaktansı Q : Reaktif güç
Wn : Açısal hız
Ø : SSSC çıkıĢ gerilimi faz açısı θ : SSSC hat akımının faz açısı
δ : Hat baĢı ile hat sonu arasındaki faz farkı δ1 : Gönderici uç gerilimin faz açısı
δ2 : Alıcı uç gerilimin faz açısı Δα : Düzeltme açısı
Δw : Hız sapması
1
1. GĠRĠġ
Günümüz dünyası iletim sistemlerinde, istenilen enerjiye bağlı olarak güç sistemlerini kontrol edebilme ve iletim sistemlerinin kapasitelerinin artırılması gibi çalıĢmalar önem kazanmaya baĢlamıĢtır. Dünyada talep edilen enerji, geliĢmiĢ ve geliĢmekte olan ülkeler ile birlikte fazla nüfusa sahip olan ülke ve büyük yüz ölçümlere sahip olan Brezilya, Çin ve Hindistan gibi ülkelerde katlanarak artmaktadır. Enerji üretiminin yapıldığı merkezlerden, enerjinin yoğun olarak tüketildiği merkezlere uzun mesafeler ile taĢınmaktadır (Kaya 2006). Güç sistemlerinde bulunan elektrik santrallerinin verimli kullanılması halinde, yeni santral gereksinimi azalmıĢ olur ve mevcut bulunan iletim hatları ile daha fazla güç transfer edilir. Günümüzde enerji iletim hatlarındaki yük miktarı artarak devam etmektedir (Eminoğlu 2003). Enerji iletim hatlarında devamlı olarak değiĢen talep güçleri ve iletim hatlarının yüksek kapasitelerde kullanımından dolayı yük baralarında gerilim değiĢimleri meydana gelmektedir. Yük baralarında meydana gelen gerilim değiĢiminin en temel sebebi reaktif güç talebidir (Köse 2012). Reaktif güç kompanzasyonu, elektrik enerji sistemlerinin kontrolünde önemli bir sorundur. . Talep edilen reaktif güç artıkça, iletim sistemleri kayıpları artar, enerji iletim hatlarındaki güç iletim kapasitesi azalır ve iletim hattının sonunda bulunan gerilimin genliğinde büyük değiĢmeler meydana gelir (Gyugyi 1988). Bu problemlerden dolayı, reaktif güç kompanzasyonu yapılarak iletim hatlarında taĢınan güç miktarı artırılır ve iletim hatlarının kayıpları azaltılır. Ayrıca, uzun iletim hatlarında hat endüktansının ve kapasitesinin etkisi, az yüklü durumlarda aĢırı gerilimlere ve çok yüklü durumlarda ise gerilim azalmalarına neden olur. Bu neden ile iletim hattının gerilimi kontrol edilmesi gerekmektedir. Ġletim hattı kontrolünün sağlanması için hattın belirli noktalarında güç akıĢ kontrolörleri ile kompanzasyonu yapılması gerekmektedir. Baraların gerilimleri ve reaktif güçleri kontrol edilmesiyle kararlılık sınırları artırılır ve iletim sistemlerindeki gerilim düĢümleri azaltılır. Kompanzasyon ile iletim hatlarındaki güç akıĢını artırmak için kondansatör grupları ve anahtarlamalı reaktörler kullanılmaktadır. Kompanzasyon yapmak için kullanılan kondansatör ve reaktör gruplarının güç sisteminde meydana gelen değiĢimlere hızlı cevap verememesi en büyük dezavantajıdır (Çöteli 2006).
2
Enerji iletim hatlarında kompanzasyon yapmak için kullanılan tristörler ve diğer yarı iletken elemanları ile hızlı bir Ģekilde yapıldığı takdirde, güç sistemlerinde oluĢabilecek gerilim çökmelerinin önlenebileceği ve güç sistemlerinin dinamik kararlılığını iyileĢtirebileceği görülmüĢtür. Son yıllarda güç sistemlerinde ihtiyaç duyulan kompanzasyonda kullanılan güç elektroniği elemanlarının iletim sistemlerindeki değiĢimlere hızlı cevap verebilme özelliklerinden dolayı kompanzasyon uygulamalarında sıklıkla kullanılmaktadır (Çöteli 2006).
Ġletim sistemlerindeki güç akıĢ miktarı, hattın gerilimi ve hattın faz açısı parametreleri ile doğru orantılı, hattın empedans parametresi ile de ters orantılı olarak değiĢmektedir. Bu parametre değerlerinde oluĢan bir aksaklık gerilim dalgalanmaları, iletim sistemlerinde istenilmeyen kayıplara ve arzu edilmeyen reaktif güç akıĢan neden olur. Güç sistemlerinde seri ve paralel kompanzasyona baĢvurularak hat empedansı, hat gerilimi, hattan akan akım ve hattın faz açısının kontrolünün sağlanması ile iletim hattında taĢınan güç miktarı artırılır ve hattın güç faktörü iyileĢtirilir (Yalçınöz 2001).
Güç sistemlerinin kontrolünün yeterince yapılmaması, aĢırı yüklenmenin meydan gelmesi ve aĢırı reaktif güç talep edilmesi güç sistemlerinde büyük dinamik salınımları, düĢük güç transferi, güç sistemlerinde gerilim çökmeleri, geçici ve sürekli hal kararsızlığı gibi fazlaca problemi beraberinde getirir. (Kaya 2006).
Yarıiletken teknolojisinde meydana gelen hızlı geliĢmeler neticesinde güç elektroniği endüstrisini etkileyerek güç sistemlerinde yeni güç elektroniği elemanları kullanılmaya baĢlamıĢtır (Tang 1995). Güç sistemlerinde oluĢan bu tür problemlerin çözümünde güç elektroniğinde meydana gelen hızlı geliĢmeler ile Elektrik Güç AraĢtırmaları Enstitüsü (The Electric Power Research Institue - EPRI) tarafından 1980‟lerin sonunda gündeme getirilen yeni bir kavramı ortaya çıkarmıĢtır. “Esnek Alternatif Akım Ġletim Sistemleri” veya kısaca “FACTS (Flexible Alternative Current Transmission Systems)” adı verilen bu kavram ile güç sistemi mevcut kaynaklarının daha verimli kullanılması sağlanmaktadır (Baysal 2008). FACTS denetleyicileri, güç akıĢ kontrolünde sistemlerin geçici ve kalıcı kararlılığını iyileĢtirmede kullanılabilmektedir ve güç sistemi salınımları azaltılabilmektedir (Hingorani ve Gyugyi 1999). Ayrıca bu denetleyiciler iletim sistemleri maliyetlerini düĢürmekle birlikte reaktif güç akıĢını ve güç sistemlerindeki salınımları azaltarak iletim hattının
3
daha fazla aktif güç taĢımasını sağlamaktadır (Song ve Johns 1999). FACTS denetleyicileri güç elektroniği elemanlarından oluĢtuğu için, güç sistemlerinde meydana gelebilen hızlı değiĢimler karĢısında bu denetleyiciler hızlıca cevap verebilme özelliklerine sahiptirler. FACTS denetleyicileri genel olarak, iletim sistemlerinin kontrolünü sağlayarak, güç sistemde aktarılan güç miktarını artırarak, hızlı ve etkin denetimin yapılması sağlanır. FACTS denetleyicileri, iletim hattının empedans kontrolü, faz açısı kontrolü, iletim sistemindeki gerilim ve akımın istenilen değerlerde kontrolü ve iletim sistemlerinde reaktif güç kompanzasyonu gibi uygulamalarda kullanılır. Bu noktada esnek alternatif akım iletim sistemleri kontrolörleri taleplerin gerçekleĢtirilmesi açısından giderek artan bir öneme sahiptir (Padiyar 2007).
Günümüzde güç sistemlerine olan talep arttıkça, istenmeyen gerilim ve frekans değiĢimleri gibi önemli durumlarla karĢılaĢmak kaçınılmazdır. Esnek alternatif akım iletim sistemi (FACTS) araçları ile güç osilasyonlarının sönümü geliĢtirilerek ve iletim hatları boyunca güç akıĢı kontrol edilerek bahsedilen istenmeyen durumlar azaltılmaktadır (ġahin 2007). Ayrıca, güç sistemleri güvenliği daha da artmaktadır. Burada iki ana hedef vardır. Ġletim sistemlerinde güç transfer kapasitesinin artırılması ve güç akıĢının belirli kurallar çerçevesinde yapılmasının sağlanmasıdır (Song ve Johns 1999).
1.1. Tezin Yapısı ve ÇalıĢması
Tez çalıĢmasında, SSSC içeren sonsuz baraya bağlı bir makineli güç sisteminde kaskad kontrolör kullanarak ortaya çıkan salınımların sönümlenmesi üzerine çalıĢılmıĢtır. Önerilen kaskad kontrolör, SSSC(Statik Senkron Seri Kompansatör) ve kaskad kontrol yapılarında oluĢmaktadır. Kaskad kontrol sistemi iç ve dıĢ döngüden meydana gelmektedir. Ġç ve dıĢ döngü P-I-D tipli denetleyiciler kullanılmaktadır. Kaskad kontrol yapısının iç ve dıĢ döngüsünde bulunan P-I-D tipli denetleyicilerin parametre değerleri Genetik Algoritma yöntemi kullanılarak belirlenmiĢtir.
Tezin yapısında bulunan ikinci bölümde, literatür taraması yapılarak tez konusu ile ilgili daha önce yapılan çalıĢmalar hakkında genel olarak bilgiler verilmiĢtir.
Tezin üçüncü bölümünde bulunan Materyal ve Metot kısmında ilk önce Esnek Alternatif Akım Ġletim Sistemlerinin genel yapısı, çeĢitleri hakkında bilgi verilmiĢtir.
4
Daha sonra, genetik algoritma ve kaskad kontrol sistemlerinin genel yapıları hakkında bilgiler verilmiĢtir.
Tezin dördüncü bölümünde, SSSC tabanlı kaskad kontrolör sisteminin optimizasyon sonuçları MATLAB/Simulink ortamında elde edilen grafikler ile verilmiĢtir ve kaskad kontrol sistemlerinde kullanılan PID-PI, PI-PI tipli kontrolörlerinin parametreleri kullanılarak cevap eğrileri elde edilmiĢ ve birbiri ile karĢılaĢtırılmıĢtır. KarĢılaĢtırılma neticesinde en iyi performansı gösteren kaskad kontrolör yapısı, klasik PID kontrol ve SSSC için sönümleme kontrolör ile karĢılaĢtırılmıĢtır.
Tezin beĢinci bölümü olan TartıĢma ve Sonuç kısmında ise tez genelinde yapılan çalıĢmalardan ve amaçlardan bahsedilmiĢ, sonuç olarak varılan nokta hakkında açıklama yapılmıĢ, tezin getirdiği yeni çalıĢma konularından bahsedilmiĢ ve ileriki zamanlarda yapılabilecek çalıĢmaların yönü hakkında kanıya varılmıĢtır.
5
2. ÖNCEKĠ ÇALIġMALAR
Güç sistemlerinde normal çalıĢma anında güç sistemine ilave bir yükün getirilmesi veya güç sisteminden yükün çıkarılması, güç sistemlerinde düĢük genlikli ve frekanslı (0. 2 - 3. 0 Hz) salınımlar oluĢur. DüĢük genlikli ve düĢük frekanstaki güç salınımlarının uzun periyotlar ile devam etmesi, enterkonnekte sistemde güç iletimini sınırlayacak boyutlara varılmasına ve ayrıca sistemde gerilim çökmesi meydana gelmesine neden olmaktadır (Vandiver ve ark. 2010). Literatürde, SSSC kullanılarak güç sistemlerindeki sürekli hal kararlılığının iyileĢtirilmesi ve güç sistemlerindeki salınımlarının sönümlenmesine iliĢkin çeĢitli araĢtırmacılar tarafından bir çok çalıĢma yapılmıĢtır. Literatürde yapılan çalıĢmalar aĢağıda özetlenmiĢtir.
Swain ve arkadaĢlarının yapmıĢ oldukları çalıĢmada, SSSC içeren sonsuz baraya bağlanmıĢ bir makinalı güç sisteminden oluĢmaktadır. Güç sistemindeki SSSC‟nin kontrolü klasik kontrol sistemi kullanılarak sağlanmıĢtır. Güç sisteminde kullanılan klasik kontrol sisteminde PID ve PI tipli kontrolörler kullanılmıĢtır. Klasik kontrol sistemlerinde kullanılan kontrolörlerin parametre değerleri Diferansiyel Evrim Algoritması ve Genetik Algoritma yöntemleri kullanılarak optimize edilmiĢtir. Önerilen kontrolörler ile güç sisteminin kararlılığı artırıldığı, güç sistemindeki salınımların azaltıldığı ve güç sisteminin kararlılığının sağlandığı ifade edilmektedir (Swain ve ark. 2012).
S. Panda ve arkadaĢlarının yapmıĢ olduğu çalıĢma SSSC içeren sonsuz baraya bağlı bir makinalı sistem ve SSSC içeren sonsuz baraya bağlı üç makinalı sistemi olarak iki aĢamadan oluĢmaktadır. Her iki aĢamada güç sistemin kontrolü PSS (Power System Stabilizer) yöntemi ile sağlanmıĢtır. PSS kontrolörü birçok değiĢkenli parametreden meydana gelmektedir. PSS kontrolörünü parametre değerleri PSO (Particle Swarm Optimization- Parçacık Sürü Optimizasyonu) yöntemi optimize edilerek en iyi çalıĢma değerleri elde edilmiĢtir. PSO yöntemi ile parametre değerleri optimize edilen bir makinalı ve üç makinalı güç sistemlerindeki salınımlar azaltılarak, güç sisteminin kararlı bir Ģekilde çalıĢtığı ifade edilmektedir (Panda ve ark. 2008).
Jowder F.A, yapmıĢ oldukları çalıĢmada SSSC içeren sonsuz baraya bağlı rüzgâr santralinden oluĢmaktadır. Rüzgâr santralinin geçici kararlılık çalıĢmasını SSSC kullanılarak incelenmiĢtir. Bu çalıĢma ile rüzgâr santralinin, terminal gerilim kontrolü
6
açısından, güç sisteminde oluĢabilen salınımları ortadan kaldırdığı ifade edilmektedir (Jowder 2007).
Wei Q. ve arkadaĢları, yapmıĢ oldukları çalıĢma ile rüzgâr santraline bağlı bulunan çok generatörlü güç sisteminin, Reaktif güç, aktif güç ve gerilim değiĢimleri, osilasyon sönümlemesi, güç akıĢı ve rotor açısı kontrolünü, SSSC ve STATCOM (Statik Senkron Kompansatör) ile incelenmiĢlerdir. SSSC ve STATCOM‟ un etkili olduğu bu çalıĢma ile görülmüĢtür (Wei ve ark. 2009).
M. Özdemir, H. Dirik, Ç. Kocaman, güç sistemlerinde STATCOM ve SSSC ile güç akıĢları ve gerilim dağılımı üzerine yapmıĢ oldukları çalıĢma ile güç sistem kararlılığını iyileĢtirecek, bu denetleyicilerin gerilim çökmesine karĢı etkili olduğunu göstermiĢlerdir. Ayrıca, denetleyiciler güç sisteminin maksimum yüklenme oranını arttırmakta ve böylece aynı sistemin, daha fazla güç taĢıyabilmesine yardımcı olduğu belirtilmektedir (Özdemir ve ark. 2005).
S. A. Kumar ve arkadaĢlarının yapmıĢ oldukları çalıĢma, SSSC içeren iki makinalı bir güç sisteminden meydana gelmektedir. Güç sisteminin kontrolü iki farklı yöntem ile sağlanmıĢtır. Birinci yöntem iki makinalı sistemin kontrolünü PI kontrolör ile sağlamaktadır. Ġkinci yöntem ise Neuro Fuzzy yöntemi ile güç sistemi kontrolünü sağlamaktadır. PI kontrolör ve Neuro Fuzzy yöntemleri kullanılarak güç sistemi kararlılığına olumlu etkisi, aktif ve reaktif güç değiĢimlerinde kararlılık yönünden olumlu sonuçların elde edildiği ifade edilmektedir (Kumar ve ark. 2012).
Padma ve Rajaram yapmıĢ oldukları çalıĢma, SSSC içeren üç makinalı bir güç sisteminden oluĢmaktadır. Yapılan çalıĢmada PI kontrolör, Fuzzy lojik kontrolör ve Sinir Ağı kontrolör yöntemleri kullanılarak SSSC‟nin kontrolü sağlanmaya çalıĢılmıĢtır. Üç farklı yöntem ile elde edilen güç sistemi gerilimi ve faz açısı sonuçlarının birbiriyle karĢılaĢtırılarak gerilim kararlılığı ve faz açısı için olumlu sonuçların elde edildiği ifade edilmektedir (Padma ve Rajaram 2011).
M. K. DöĢoğlu, A. Öztürk, yapmıĢ oldukları çalıĢma ile rüzgâr santralinin beslediği bir güç sisteminin FACTS denetleyicilerinden SSSC ve Tristör Kontrollü Seri Kapasitör (TCSC) kullanılarak yük baralarının gerilimi, reaktif ve aktif güç kontrollerinin sağlanması amaçlanmıĢtır. Güç sistemlerinde kullanılan SSSC ve TCSC
7
denetleyicileri yük baralarında oluĢan salınımları sönümlediği ve güç sistemi kararlılığını iyileĢtirdiği ifade edilmektedir (DöĢoğlu ve Öztürk 2010).
S. Panda yapmıĢ olduğu çalıĢma SSSC içeren üç makineli bir güç sisteminden oluĢmaktadır. PSS(Power System Stability) kontrolörü kullanılarak güç sisteminin kontrolü sağlanmıĢtır. PSS kontrolörünün parametre değerleri Real Kodlu Genetik Algoritma (RCGA) yöntemi ile optimize edilmiĢtir. Yapılan çalıĢma neticesinde güç sistemi kararlılığının artırıldığı ve güç sistemindeki azaltıldığı ifade edilmektedir (Panda 2010).
H. Taheri, S. Shahabi, Sh. Taheri, A. Gholami yapmıĢ oldukları çalıĢma SSSC içeren iki makinalı bir güç sisteminden oluĢmaktadır. Faz kontrol tekniği ve PWM kontrol tekniği kullanılması ile güç sistemindeki SSSC‟nin kontrolü sağlanmıĢtır. Yapılan çalıĢmalar ile güç sistemlerindeki salınımların azaltıldığı, iletim sistemlerinde taĢınan aktif ve reaktif güç miktarları iyileĢtirildiği ifade edilmektedir (Taheri ve ark. 2009).
Laopromsukon ve arkadaĢlarının yapmıĢ oldukları çalıĢma iki bölgeli dört makinalı bir güç sisteminden oluĢmaktadır. SSSC‟li güç sisteminin kontrolü Fuzzy Logic kontrolörü ile sağlanmaktadır. GeniĢ alan güç sistem kontrolü için Fuzzy Logic denetleyici ile SSSC‟den oluĢmaktadır. Bu çalıĢma ile güç sistemindeki salınımların sönümlenmesi ve güç sistemindeki güç akıĢının iyileĢtirilmesi üzerin iyi bir çalıĢma olduğu ifade edilmektedir (Laopromsukon ve ark. 2014).
Shankar ve arkadaĢlarının yapmıĢ oldukları çalıĢma SSSC içeren iki makinalı bir güç sisteminden oluĢmaktadır. Güç sisteminde bulunan SSSC‟nin kontrolü PI kontrolör ile sağlanmıĢtır. Bu çalıĢma ile güç sistemlerinde oluĢan salınımlarının sönümlenmesi, güç sistemindeki aktif ve reaktif güç kontrolünün sağlanarak taĢınan aktif güç miktarının artırıldığı ve güç sistemi geriliminin iyileĢtirilmesi üzerine yapılan iyi bir çalıĢmanın olduğu ifade edilmektedir (Shankar ve ark. 2015).
More V.M ve arkadaĢının yapmıĢ oldukları çalıĢma SSSC içeren güç sisteminin 4 makinalı ve 2 bölgeden oluĢmuĢtur. Bu çalıĢmada, SSSC‟nin kontrolü PI kontrolörü ile sağlanmaktadır. Yapılan bu çalıĢma ile güç akıĢ kontrolünün ve güç sisteminin performansının iyileĢtirildiği ifade edilmektedir (More ve Chandrakar 2016).
8
Literatürde yapılan çalıĢmaların incelenmesi sonucunda, SSSC içeren sonsuz baraya bağlı bir makinalı güç sistemi kontrolünde farlı kontrol yöntemleri kullanılmıĢtır. Ancak, kaskad kontrolör sistemi tabanlı kontrol sisteminin kullanılması ilgili çalıĢmanın daha önce yapılmadığı belirlenmiĢtir. Kaskad kontrol sistemin ise klasik geri beslemeli sistemlere göre performansının daha iyi olduğu, bozucular karĢısında hızlı ve etkin denetim yaptığı ve kaskad kontrol sistemlerin iç ve dıĢ döngülerindeki salınımları daha iyi sönümleyebildiği için bu çalıĢmada SSSC içeren sonsuz baraya bağlı bir makinalı güç sisteminin kaskad kontrol yapısı tercih edilmiĢtir.
9
3. MATERYAL VE METOT
3.1. Esnek Alternatif Akım Ġletim Sistemleri (FACTS)
Bilindiği üzere, enterkonnekte güç sistemleri sayısız bara ve binlerce generatörden oluĢan karmaĢık yapılar olup elektrik enerjisinin tüketiminin gerçekleĢmesi için güç sistemlerinin güvenliğinin sağlanacak halde geliĢtirilmesi gerekmektedir. Enerji iletim hatları, enerjinin üretildiği merkezlerden enerjinin tüketiminin gerçekleĢtiği yükler arasındaki enerjinin taĢınmasını sağlamaktadır. Üretim birimlerinin sayısını en aza indirgemek, yük çeĢitliliğinin avantajlarından yararlanmak ve enerji kaynaklarına eriĢebilmek için bu bağlantılar gereklidir. Ġletim sistemlerinin çok büyük bir bölümü alternatif akım (AC) sistemleridir.
AC iletim sistemlerinde güç akıĢının Ohm Yasası‟na göre olması güç akıĢının istenilen Ģekilde kontrol edilemediği anlamına gelmektedir. Enerji üretildiği merkezden yüke doğru akan güç miktarı iletim sisteminin empedansı ile ters orantılı olarak değiĢmektedir. Empedansı düĢük olan iletim sistemlerinden daha fazla güç transfer edilmektedir. Ġletim hattındaki güç akıĢ miktarı, iletim sistemi empedansına, hat baĢı gerilimine, hat sonu gerilimine ve bu gerilimler arsındaki faz açısına bağlı olarak değiĢmektedir. Bu parametre değerlerinden herhangi biri veya birkaçının kontrol edilmesiyle iletim sistemlerindeki aktif ve reaktif güç akıĢının kontrolünü sağlamak mümkündür (Baysal 2008).
Güç sistemlerinde, güç elektroniği elemanları ve statik kontrolörler ile kompanzasyon yapılması ile güç sistemi kontrol edilebilirliğini artırmak, güç sisteminin reaktif güç taleplerinin hızlı bir Ģekilde karĢılanılması ve güç sisteminden transfer edilen güç miktarının artırılması mümkündür. Yarı iletken tabanlı anahtarlamalı tip dönüĢtürücüler ile Ģönt reaktif kompansatör cihazları tasarlanmaktadır. Güç sistemi kompanzasyonu için kullanılan cihazlara FACTS denetleyicileri denir. FACTS sistemleri, iletim sistemlerinde kompanzasyon amaçlı kullanılan reaktör veya kondansatör gruplarına ihtiyaç duymadan anahtarlamalı dönüĢtürücüler yardımıyla reaktif güç üreten ve tüketebilen denetleyicileridir (Hingorani ve Gyugyi 1999).
FACTS denetleyicileri genel olarak güç elektroniği tabanlı sistemler olup, iletim sistemlerine ani ve etkin denetim yapmak, iletim sistemleri ile transfer edilen güç
10
miktarını artırmak ve güç sistemine anormal çalıĢma durumlarında müdahale edebilmek için geliĢtirilen sistemlerdir (Dirik 2006).
FACTS denetleyicileri, güç elektroniği anahtarlama elemanlarına ve kontrolörlerine dayalı yeni bir kavramdır. FACTS sistemleri, güç sistemlerinin güç kalitesini, kararlılığını, verimini, güveliğini ve güvenirliliğini artırmak için tercih edilir (Baysal 2008). FACTS sistemlerinin iki temel amacı vardır. Birinci amacı, iletim sistemlerinden transfer edilen güç miktarının artırmak, ikinci amacı ise güç sistemindeki güç akıĢını kontrol etmektir (Hasanovic 2000).
FACTS denetleyicileri, kompanzasyonda tercih edilen reaktörler kondansatörlere ihtiyaç duymadan yarıiletken anahtarlamalı elemanlar ile reaktif güç alıĢveriĢi yapabilen sistemlerdir. Endüstriyel sistemlerin güç katsayısının düzenlenmesinde ve endüstriyel sistemlerin çıkıĢ gerilimi kararlılığını sağlamada tristör kontrollü güç kompanzasyonu sistemleri yaygın olarak kullanılmaya baĢlanmıĢtır (KarataĢ 2011).
FACTS denetleyicileri ile güç sistemleri parametrelerinden olan akımın, gerilimin, faz açısının, empedansın ve iletim hattından akan aktif ve reaktif güç akıĢının kontrolünü mümkün kılmaktadır. FACTS denetleyicilerinin birbiri ile koordinasyonu sağlanması halinde güç sisteminin geçici kararlılığı iyileĢtirilir, güç sisteminin salınımları azaltılır ve güç sistemindeki güç akıĢının denetimi sağlanarak güç transferi artırılır (Hingorani ve Gyugyi 1999).
11
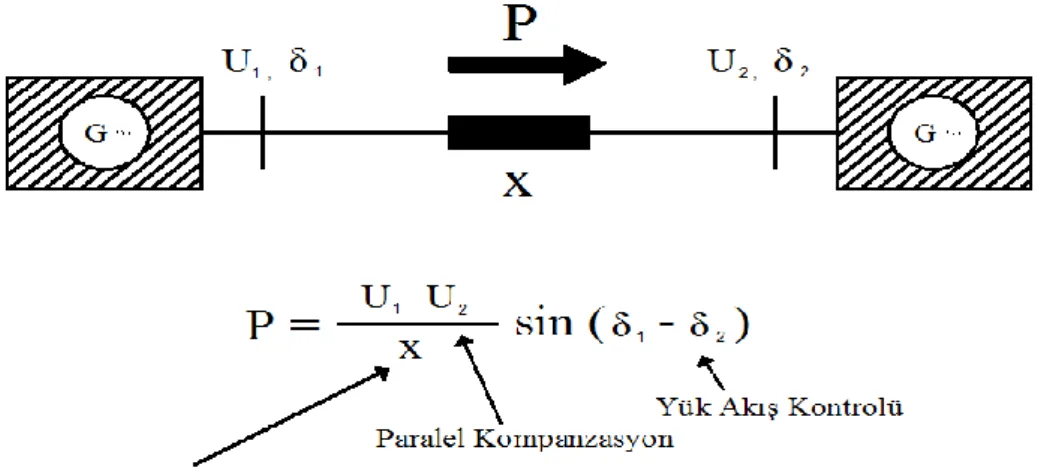
FACTS denetleyicileri, yarı iletken elemanlardan oluĢup ve hızlı hareket etme yeteneğine sahiptir. ġekil 3.1‟de görüldüğü üzere iletim hattının kontrolü üç parametrenin kontrolü ile sağlanmaktadır.
Gerilimin genliği (Paralel kompanzasyon) Gerilimin faz açısı (Yük akıĢı kontrolü) Hat empedansı (Seri kompanzasyon)
Geleneksel sistemlerin parametre değerlerinin kontrolüne iliĢkin yavaĢ yük değiĢimlerinde ve sürekli halde yeterli olabilirler. Ancak, dinamik sistemi Ģartlarında ise etkisizdir. Ġletim hattının güçlendirilmesi, hattın yapısına bağlı olarak değiĢkenlik gösterir. Hat empedansı kontrolü paralel hatlı ve radyal Ģebekelerde, gerilimin kontrolü zayıf sistemlerde ve yük akıĢ kontrolünün ise ağır yüklü ve örgülü Ģebekelerde tercih edilmelidir.
Aktif güç kontrolünü bu üç değiĢkenin yanına dördüncü değiĢken olarak bırakılabilir. ġekil 3.2‟ de aktif gücün faz açısı ile iliĢkisi verilmiĢtir. Güç sistemindeki gerilimler, bu gerilimlerin faz açısı ve hattın empedansının ayarlanması ile aktif güç etkin bir Ģekilde kontrol edilir (Kaya K. 2006).
ġekil 3.2. Güç sistemi: aktif güç-faz açısı iliĢkisi
Güç sistemleri kararlılığı, herhangi bir çalıĢma koĢullarında bir güç sisteminin bozunumlara maruz kalması sonucunda sistemin tekrardan bir denge noktasının
12
kazanılması olayıdır. Güç sistemleri sürekli olarak bozunumlar ile karĢılaĢmaktadır. Güç sistemleri sürekli değiĢen yüklerden dolayı, iletim hatlarında meydana gelen kısa devre arızaları ve generatörlerin devreden çıkması gibi bozunumlar ile karĢılaĢmaktadır. Güç sistemlerinin karĢılaĢtığı bozunumlar karĢısında kendini ayarlayabilir olması veya tekrardan eski çalıĢma noktasına dönmesi gerekir (Dirik 2006).
Tüketicilerin güç talepleri artıkça yük baralarındaki gerilim düĢmektedir. Yük baralarındaki gerilim düĢtüğünde ise güç sisteminin çalıĢmasında aksaklıklar meydana gelir. Güç sistemindeki yük baraları belirli değerler arasında çalıĢmaktadır. Yük baralarının belirli değerlerin dıĢına çıkması gerilim kararlılığının bozulmasına sebep olur (Öztürk 2007).
Güç sistemlerinde, sürekli çalıĢma koĢullarında kayıpların ihmal edildiği düĢünülürse sistemdeki mekanik giriĢ ve elektriksel çıkıĢı arasında bir denge söz konusudur. Elektriksel çıkıĢ enerjisi olarak güç sisteminde bulunan yüklerle ilgilidir. Mekaniksel giriĢ enerjisi ise senkron generatörü tahrik eden sistemin enerjisidir (Erdem 2007). Güç siteminde herhangi bir bozunum gelmesi halinde senkron generatör giriĢine gelen mekaniksel güç rotoru daha hızlı dönmesini sağlar ve rotorun kinetik enerjisi artmıĢ olur. Generatörün yüklenme açısı δ artacaktır bu sayede. Güç sisteminde δ açısının zamana göre değiĢimine bakılarak sistemin kararlı olup olmadığına karar verilir. Seri kompanzasyon yapılarak hattın reaktansının düĢürülmesi amaçlanır. Reaktansı düĢen hattan taĢınan aktif güç miktarı artmıĢ olur. Faz açısının fazla değiĢmesi ise sistemi kararsız duruma sürükler (Kaya K 2006).
Ani yük değiĢimleri ve kısa devre arızaları sonucunda dengesi bozulan güç sisteminin tekrardan eski çalıĢma koĢullarına dönmesi için generatöre giriĢ olarak verilen regülatörün tahrik gücünde yapılan değiĢimle ile aktif güç ayarlanabilmektedir. Uyarma devresinde bulunan elektriksel elemanların yardımıyla uç gerilimin değiĢimi ile reaktif güç ayarlanabilmektedir (Erdem 2007).
FACTS denetleyicilerinin, güç sistemleri kontrolündeki ve iĢletilmesindeki avantajları, aĢağıdaki gibi özetlenir.
Güç sistemleri dinamik, sürekli ve geçici hal sınır değerlerine kadar güvenli bir Ģekilde yüklenebilmektedir. Böylece, güç sisteminin iletim kapasitesinin artırılması sağlanır.
13
FACTS teknolojisi geçici hal kararlılık sınırlarını yükselterek, kısa devre akımlarını ve aĢırı yüklenmeleri sınırlayarak, kaskad biçimli kesintileri düzenleyerek, makinelerin ve sistemin elektromekanik salınımlarını sönümleyerek, sistemin güvenliğini ve güvenilirliğini arttırır.
FACTS denetleyicileri güç sistemindeki akım ve/veya gerilim kapasitelerini artırarak güç sisteminin verimli bir Ģekilde kullanılmasını sağlar.
Uzun iletim hatları, birbirine bağlı Ģebekelerde yük değiĢimlerinin etkilerine ve hat arızalarına bağlı olarak iletim sistemlerinde kararsızlığına neden olmaktadır. Bunlar hattaki güç akıĢının azalmasına ve hattın devre dıĢı kalmasına sebep olurlar. FACTS cihazları, yüksek enerji kapasitesi ile hattın devre dıĢı kalmasına engel olarak sistem dengesinin bozulmamasını sağlarlar.
Modern endüstriler, değiĢmeyen gerilim, yüksek kapasite ve kesintisiz elektrik kaynağı frekansının değiĢmemesini isterler. Bunun neticesinde endüstride FACTS cihazlarının kullanılmasına bağlı olarak enerjinin kalite verimliliği artırılmıĢ olur.
Büyük yatırım giderleri nedeniyle yüksek gerilim hattı için maliyet konusu göz önüne alınması gereken baĢlıca etken durumundadır. FACTS cihazlarının maliyetleri pahalı olmasına rağmen, iletim hatlarındaki sorunları gidermek için kullanılan diğer yöntemlerle kıyaslandığında muhtemelen FACTS en ekonomik yöntem olacaktır. Ayrıca güç akıĢını etkili bir Ģekilde kontrol etme özelliği sayesinde, güç sistemi daha optimum koĢullarda iĢletilebilmektedir. Sonuç olarak büyük bir ekonomiklik sağlayabilmektedir.
FACTS denetleyicilerinin içeresinde zararlı materyaller bulunmamakla birlikte çevre dostudur ( Baysal 2008, DöĢoğlu 2010).
FACTS denetleyicileri güç sistemlerine bağlanma Ģekillerine göre 4 ayrı grupta incelenir. Bunlar,
Paralel bağlı FACTS denetleyicisi Seri bağlı FACTS denetleyicisi
BirleĢtirilmiĢ seri ve paralel bağlı FACTS denetleyicisi Gerilim düzenleyici FACTS denetleyicisi
14
3.1.1. Paralel Bağlı FACTS Denetleyicileri
DeğiĢken kaynak ve empedanstan oluĢan kontrolörlerdir. Paralel denetleyiciler bağlandığı noktadan güç sistemine doğru akım akıĢı olur. Paralel FACTS denetleyicisi ġekil 3.3 ile gösterilmiĢtir. Güç sistemine aktarılan akım ile güç sistemi gerilimi arasında 90˚ faz farkı var ise paralel FACTS denetleyici yalnızca reaktif güç tüketir veya üretir. Eğer aralarında herhangi bir faz farkı yok ise paralel kontrolör aktif güç kullanır (Hingorani ve Gyugyi 1999).
ġekil 3.3. Paralel facts denetleyicisi
3.1.1.1. SVC (Statik Var Kompansatör)
SVC, elektrik güç sistemine paralel bağlanan bir FACTS denetleyicisidir. SVC‟ler baraların gerilimlerini kontrol edebilen ve çıkıĢında endüktif veya kapasitif akım alıĢveriĢini ayarlayarak reaktif güç üretebilen veya tüketebilen denetleyicilerdir (Baysal 2008).
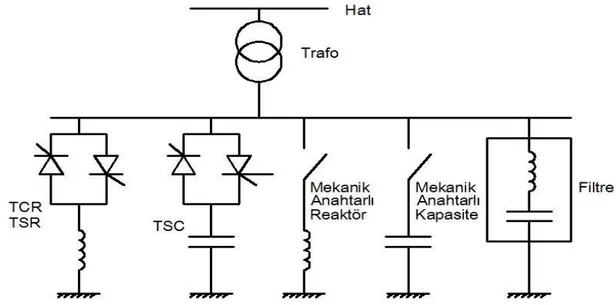
SVC‟nin iki farklı devre yapısı mevcuttur. Ġlk devre yapısı, SVC sistemi Tristör Anahtarlamalı Reaktör (TSR), Tristör Kontrollü Reaktör (TCR) ve Tristör Anahtarlamalı Kapasite (TSC), mekanik anahtarlı kapasitörden, mekanik anahtarlı reaktörden ve filtreden oluĢmaktadır. Ġkinci devre yapısı ise yaygın olarak kullanılan SVC devre yapısıdır. Bu devre yapısı da bir kondansatör ve bu kondansatöre paralel bağlı TCR‟den oluĢmaktadır (Köse 2012).
15
ġekil 3.4. SVC‟ nin içerinde bulunan temel yapılar (Dirik 2006)
ġekil 3.5. SVC‟ nin genel yapısı (Dirik 2006)
3.1.1.2. STATCOM (Statik Senkron Kompansatör)
Güç sistemine paralel bağlanan STATCOM‟un kullanımı son dönemlerde giderek artmaktadır. STATCOM en basit haliyle bir bağlantı transformatörü, gerilim kaynaklı dönüĢtürücü (VSC - Voltage Source Converter) ve dc enerji kaynağından meydana gelmektedir. DC enerji kaynağı küçük bir dc kapasitör olduğundan STATCOM yalnızca reaktif güç üretir veya tüketir. (Baysal 2008). STATCOM‟ un genel yapısı ġekil 3.6‟ da gösterilmiĢtir.
16
ġekil 3.6. Statcom‟ un genel yapısı (Hingorani ve Gyugyi 1999)
Güç elektroniği temelli FACTS denetleyicilerinin bir türü olan STATCOM bağlı olduğu güç sisteminde oluĢabilecek değiĢmelere hızlı tepki verebilmekte ve güç sisteminin dinamik kararlılığını artırmaktadır. Ġletim sistemine bağlı olan STATCOM‟ un çıkıĢında elde edilen gerilim değerinin genliği ve faz açısı değiĢtirilebilmektedir. Ġletim sistemine bağlanan STATCOM devresindeki inverterin frekansı ve AC çıkıĢ geriliminin değeri değiĢtirilerek ayarlanabilmektedir (KarataĢ 2011).
Güç sistemindeki reaktif güç kontrolü STATCOM‟un çıkıĢında elde edilen gerilimin değiĢtirilmesiyle yapılmaktadır. STATCOM çıkıĢında elde edilen gerilim (V1) güç sistemi geriliminden (V2) büyük ise STATCOM‟dan güç sistemine doğru bir reaktif güç akıĢı meydana gelir ve bu durumda akım gerilimden 90˚ ileri fazda olacağı için güç sistemine aktarılan güç kapasitif güçtür. STATCOM çıkıĢında elde edilen gerilim (V1) güç sistemi geriliminden (V2) küçük ise güç sisteminden STATCOM‟a doğru bir reaktif güç akıĢı olacaktır. Bu durumda ise akım gerilimden 90˚ geri fazda olup STATCOM güç sisteminden reaktif güç çekecektir (Ertay ve AydoğmuĢ 2010). Eğer, STATCOM‟un çıkıĢ gerilimi ile güç sistemi gerilimi eĢit olduğunda ise reaktif güç akıĢı olmamaktadır. Kapasitörden, inverter için gerekli olan DC gerilim sağlanmaktadır (Uzunoviç 1997). Güç sistemi gerilimi ve STATCOM çıkıĢ gerilimlerinin arasındaki faz farkının değiĢtirilmesi ile sistemin aktif güç kontrolü sağlanır. ġekil 3.7 ile STATCOM‟un devre modeli ve reaktif güç alıĢveriĢi için çalıĢma modları belirtilmiĢtir.
17
ġekil 3.7. Statcom devre modeli ve Ġletim hattı ile reaktif güç alıĢveriĢi için çalıĢma
modları (Dirik 2006)
Eğer, STATCOM çıkıĢ gerilimi güç sistemi geriliminden ilerde tutulursa, STATCOM güç sistemi yönüne aktif güç akıĢı olur. STATCOM çıkıĢ gerilimi, güç sistemi geriliminden geride tutulursa güç sisteminden STATCOM‟a doğru bir aktif güç akıĢı olur.
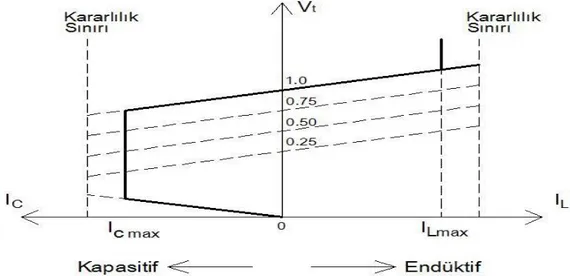
STATCOM‟un uç geriliminin değiĢtirilmesi ile tüketilen veya üretilen reaktif güç kontrol edilebilir. Uç gerilim değeri referans değerinden ne kadar büyük olursa STATCOM bağlı bulunduğu Ģebekeden o oranda reaktif güç çekecektir. Uç gerilim değeri referans değerinden ne kadar küçük olursa STATCOM bağlı bulunduğu Ģebekeye o oranda reaktif güç verecektir. ġekil 3.8‟deki STATCOM‟un akım-gerilim karakteristiğinde bu durum açıkça görülebilmektedir.
18
3.1.2. Seri Bağlı FACTS Denetleyicileri
Seri bağlı kontrolörler değiĢken kaynak ve empedanstan oluĢan kontrolörlerdir. Seri bağlanan denetleyiciler gerilimi hatta seri olarak enjekte ederler (ġekil 3.9). Hattan akan akım ile değiĢken empedans çarpıldığında hatta enjekte edilen seri gerilim oluĢur. Seri bağlı kontrolörün güç sistemine enjekte ettiği gerilim ile hattan akan akım aynı fazda olursa her iki sistem arasında aktif güç alıĢ veriĢi olur. Eğer, enjekte edilen gerilim ile güç sistemi gerilimi arasında 90˚ faz farkı var ise seri bağlı kontrolör reaktif gücü hatta verir veya hattan çeker (Kaya K. 2006).
ġekil 3.9. Seri facts denetleyicisi
3.1.2.1. SSSC (Statik Senkron Seri Kompansatör)
Statik Senkron Seri Kompansatör (SSSC), güç sitemine seri bağlanan bir FACTS denetleyicisi olup gerilim kaynaklı konverter (VSC), DC kapasitör ve kuplaj transformatöründen meydana gelmektedir (Song ve Johns 2008). Statik Senkron Seri Kompansatörün, Statik oluĢu devreye kapasitör/reaktör ilave çıkarması olmadığını, senkron oluĢu enjekte geriliminin hat akımıyla aynı faz açısında olmasını, seri oluĢu kendisinin dolayısıyla enjekte ettiği gerilimin devreye seri olduğunu ifade eder (Hingorani ve Gyugyi 1999). Genel olarak SSSC, güç sistemindeki aktif ve reaktif güç kontrolünü sağlamak için tercih edilmektedir. SSSC ile güç sistemi akımı direkt kontrol edilebilmektedir. Üretilen reaktif güce bağlı olarak hat akımı ve gerilimi değiĢebilmektedir. SSSC, kapasitif ve endüktif olarak çalıĢabilmektedir. ġekil 3.10 ile SSSC‟ nin genel yapısı gösterilmiĢtir ( DöĢoğlu 2010).
19
ġekil 3.10. (a) SSSC‟ nin temel yapısı , (b) SSSC‟ nin eĢdeğer devresi (Padiyar 2007)
SSSC‟nin yaptığı, iletim hattının reaktansının (XL) bir kondansatör, konverter ve transformatör üzerinden azaltma iĢidir. Seri kompanzasyon yöntemi ile iletim hattının reaktansı azaltılır. Bu Ģekilde, hattan akmakta olan aktif güç akıĢı denetlenebilmektedir (Dirik 2006). SSSC ile iletim hattındaki empedansın kontrolü, SSSC‟nin iletim hattına uygun faz açısında gerilimin enjekte edilmesi ile gerçekleĢir. Ġletim hattındaki empedansın kontrolü sistemdeki kapasitif ve endüktif durumlara göre gerçekleĢmektedir. Sistemdeki aktif güç kontrolü açının genlik değerine göre reaktif güç kontrolü ise gerilimin genlik değerine bağlı olarak yapılmaktadır (DöĢoğlu 2010). SSSC iletim hattına eklediği gerilim, güç sistemindeki akan akım ile aynı fazda olur ise SSSC ile iletim hattı arasında aktif güç alıĢveriĢi gerçekleĢir. Fakat SSSC‟nin iletim hattına eklediği gerilim iletim hattından akan akım arasında 90˚ faz farkı var ise SSSC ile iletim hattı arasında reaktif güç alıĢveriĢi gerçekleĢir. Bu durumlar ġekil 3.11‟ de değiĢik çalıĢma modları için fazörsel olarak gösterilmiĢtir (Dirik 2006).
20
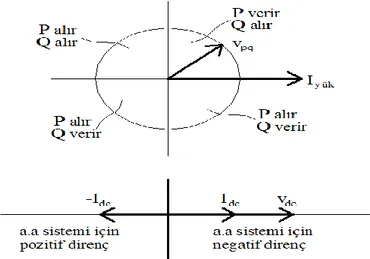
Güç sistemi ile aktif ve reaktif güçlerin alınıp verileceğini konverter çıkıĢ gerilimi ve güç sistemi akımı belirlemektedir. ÇalıĢma modlarındaki I. bölge olarak aktif gücün verildiği reaktif gücün alındığı alan, II. bölgede aktif ve reaktif gücün alındığı alan, III. Bölgede de aktif gücün alınıp reaktif gücün verildiği alan, IV. bölgede ise aktif ve reaktif gücün verildiği alan olarak tanımlanmaktadır. Ayrıca DC kapasitörün Ģarj veya deĢarj olmasına bağlı olarak akımın pozitif veya negatif olduğu yine ġekil 3.11‟ de gösterilmektedir. SSSC‟ nin pozitif direnç ve negatif direnç olarak çalıĢmasında DC kapasitörün çevirici devresine olan beslemesine bağlı olarak değiĢmektedir (DöĢoğlu 2010).
ġekil 3.12. SSSC ile kompanze edilmiĢ bir hat ve SSSC‟nin içyapısı
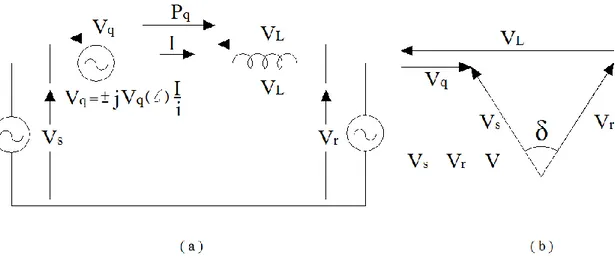
ġekil 3.12 ile SSSC denetleyicisinin içyapısı verilmiĢtir. Transformatörün konverter tarafındaki gerilim hat tarafındaki gerilime göre daha büyüktür. Çünkü konverter tarafındaki akımın GTO elemanlarının akım değerlerine uygun olması gerekmektedir. Transformatörün konverter tarafı üç bağlantılıdır. Üçgen bağlanmasının sebebi konverterden gelen 3.harmonik akımlarının akması gerekmektedir. Konverter çıkısında bulunan yarı iletken anahtarlar, iletim hattından çok yüksek akımlar aktığı zaman konverteri çok yüksek akımlardan korumak için konverteri by-pass eder. Doğru gerilimli kapasitenin değeri doğru gerilimdeki sıçramaların önlenmesi amacıyla yeterli büyüklükte bir değerde seçilir.
21
Güç sistemine eklenen gerilim güç sisteminden akan akımdan 90˚ geride olur ise SSSC kapasitif etki gösterir. Bu durumda SSSC çıkıĢ gerilimi;
(3.1) Ģeklinde ifade edilir. Burada I, iletim hattının akımı, X iletim hattının reaktansı ve k ise
seri kompanzasyon katsayısıdır. SSSC‟nin kapasitif çalıĢma durumunda güç sisteminin empedansını azaltır, hat akımı ve güç sistemine iletilen aktif gücünü artırır. Bu durumda kX=XC olarak yazılır. Seri Kompansatör değiĢen hat akımında kompanzasyon gerilimi sabit değerde tutabilmekte veya bu gerilimin hat akımından bağımsız olarak kontrol edilebilmektedir. Bunlardan dolayı sisteme enjekte edilen gerilimin genel ifadesi denklem (3.2) ile verilmiĢtir.
(3.2)
ġeklinde ifade edilmektedir. Vq eklenen gerilim genlik değeri, (δ) kontrol için seçilen parametre, (І) kompanzasyon yapılmadığı durumdaki hat akımı ve (i) ise kompanzasyon durumundaki hat akımını ifade etmektedir. Verilen (3.2) denkleminden yararlanılarak SSSC güç sistemi devresi ve fazör diyagramı ġekil 3.13 ile verilmiĢtir (Eminoğlu 2003).
ġekil 3.13. (a) SSSC‟ li güç sistemi devre Ģeması, (b) gerilime ait fazör diyagramı (Hingorani ve Gyugyi
1999)
Güç sistemine eklenen gerilim güç sisteminden akan akımdan 90˚ ileride olur ise SSSC endüktif etki gösterir. SSSC‟ nin endüktif çalıĢtığı durumda ise iletim sisteminin
22
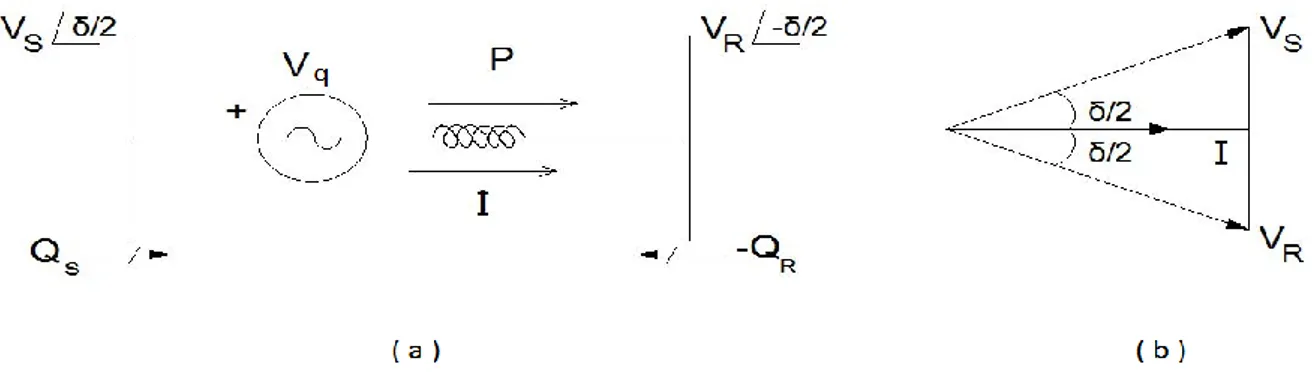
empedansı artar hat akımı ve güç sistemine aktarılan aktif güç azalır (Eminoğlu 2003). Bir iletim hattında SSSC‟ nin gösterimi ġekil 3.14 ile verilmiĢtir.
ġekil 3.14. SSSC‟ nin tek hat diyagramı (a), fazör diyagramı (b) (Padiyar 2007)
Eğer, eĢitliği olursa hat üzerine düĢen gerilim aĢağıdaki denklem gibi gösterilir.
(3.3)
(3.4)
(3.5)
Ġletilen reaktif güç değiĢimi ise aĢağıdaki denklem ile yazılabilir.
(3.6)
(3.5) denklemi ile verilen aktif güç Vq değerinde (kapasitif çalıĢma durumunda) kompanzasyonsuz duruma nazaran oldukça büyük oranda artacaktır. Endüktif çalıĢma durumunda ise aktarılan güç aynı oranda azalacaktır. Aktarılan gücün farklı Vq değerleri için değiĢimi ġekil 3.15‟ te verilmiĢtir (Hingorani ve Gyugyi 1999).
23
ġekil 3.15. SSSC ile kompanze edilen hattın eklenen gerilime göre aktif güç değiĢimi (Hingorani ve
Gyugyi 1999)
Gerilim genliğinin değiĢiminden SSSC‟nin aynı güç kapasitesine sahip olan kontrol edilebilen seri kapasitöre göre daha geniĢ bir kontrol aralığına sahip olduğunu söylemek mümkündür (Song ve Johns 2008).
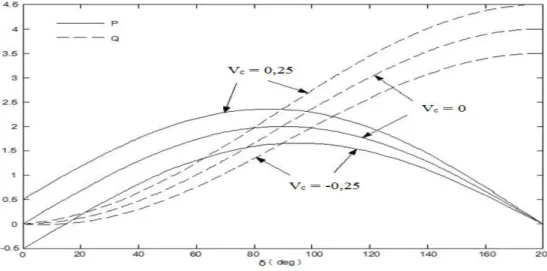
ġekil 3.16 ile SSSC‟de Aktif Güç (P) ve Reaktif Güç (Q) δ‟nın bir fonksiyonu olarak Vq‟nün değiĢik değerleri için gösterilmiĢtir.
ġekil 3.16. Aktif ve Reaktif gücün δ ile değiĢimi (Padiyar 2007)
- SSSC’ nin Temel Denetimi
SSSC‟de çıkıĢ geriliminin (Vq) denetimi, dolaylı ve doğrudan denetimi olmak üzere iki Ģekilde yapılır. Doğrudan denetiminde çıkıĢ geriliminin hem genliği hem de
24
açısı anahtarlama elemanları yardımıyla denetlenir. Dolaylı denetimde ise konverter çıkıĢ geriliminin faz açısı anahtarlama elemanı ile doğrudan oluĢturulabildiği halde çıkıĢ geriliminin genliği dönüĢtürücü giriĢindeki D.A gerilimi ile orantılı olacaktır.
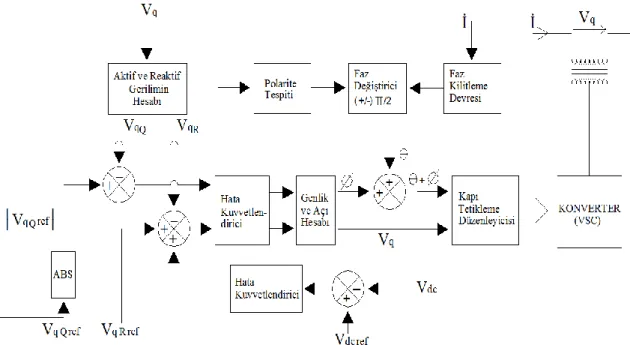
Doğrudan denetimli SSSC de üç referans giriĢ yer almaktadır. Bu referans giriĢler,
VqQref: Ġstenilen reaktif seri kompanzasyon gerilimi, VqRref: Ġstenilen aktif seri kompanzasyon gerilimi, Vdcref: Ġstenilen doğru akım gerilimidir.
Bu denetimde reaktif gerilim referansı ( VqQref ) ve aktif gerilim referansı (Vdcref veya Vdcref + VqRref ) ölçülen kompanzasyon gerilimi ( Vq )‟ nün bileĢenleri ile karĢılaĢtırılarak uygun iĢaretler elde edilir. Bu iĢaretler yardımıyla kompanzasyon geriliminin genliği ( | Vq |) ve bu gerilimin açısı (Ø) elde edilir. Bu açı hat akımı açısı θ olmak üzere Ø + θ açısına dönüĢtürülür. | Vq | ve Ø + θ değerleri kapı tetikleme düzenleyicisi tarafından kapı tetikleme iĢaretleri olarak kullanılır.
Bu denetim sistemi ile uygun d.a güç sistemi ile hem aktif hem de reaktif hat kompanzasyonunu sağlar. ġekil 3.17‟de doğrudan denetimli SSSC nin denetim Ģekli verilmiĢtir.
25
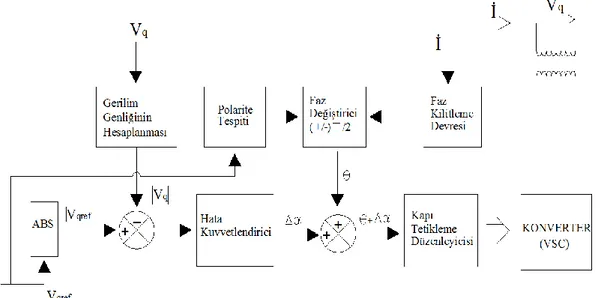
Dolaylı denetim giriĢleri; hat akımı (i), hatta ilave edilen kompanzasyon gerilimi (Vq) ve referans gerilim (Vqref)‟dir. Denetlenen gerilimin açısı faz kilitleme devresi tarafından hat akımına göre 90˚‟lik bir faz farkı olacak Ģekilde bir temel θ açısıyla sağlanır. Bu faz farkı kompanzasyonun endüktif veya kapasitif olma durumuna göre polarite tespiti tarafından +90˚ veya -90˚ olacak Ģekilde yaratılır. Kompanzasyon gerilimi (Vq) basit bir kapalı çevrim ile denetlenir. Olması gereken kompanzasyon gerilimi olan Vqref değeri ölçülen Vq değerinin genliği ile karĢılaĢtırılarak aradaki fark bir fark kuvvetlendirici vasıtasıyla bir Δα düzeltme açısına çevrilir. Bu açı senkronizasyon iĢareti olan θ açısına eklenir. Δα açısının iĢaretine bağlı olarak dönüĢtürücü kapı tetikleme açıları biraz geri veya ileri açılara getirilir. Böylece bu açı farkından dolayı kompanzasyon gerilimi hat akımına göre 90˚ ileri veya geri fazda olması gerekirken az da olsa bir sapma gösterir. Bu Δα açısı dönüĢtürücünün a.a sisteminden çekeceği veya a.a sistemine vereceği aktif gücü belirler. Dolayısıyla bu Δα açısının denetimi ile kapasite doğru gerilimi arttırılır veya azaltılır. Bu kapasite doğru geriliminin değiĢimi ile kompanzasyon geriliminin (Vq) genliğinin uygun bir Ģekilde değiĢmesi sağlanır (Hingorani ve Gyugyi 1999). AĢağıda, ġekil 3.18‟de dolaylı denetimli SSSC nin denetim Ģekli verilmiĢtir.
26
3.1.2.2. TCSC (Tristör Kontrollü Seri Kompansatör)
FACTS denetleyicilerin bir çeĢidi olan TCSC güç sistemine seri bağlanmaktadır. TCSC, güç sistemine seri bağlı kondansatörün anahtarlaması paralel bağlanmıĢ tristörler ve tristörlere seri bağlı reaktör devresinden oluĢmaktadır. Tristör kontrollü seri kompansatör güç sistemine seri bağlandığından dolayı iletim sistemi empedansını azaltarak güç sisteminden çekilen reaktif gücü azaltılması için tercih edilmektedir. TCSC güç sistemine reaktif güç aktarırken güç sisteminden çekilen reaktif güç oranı azalır. Bir güç sisteminde yük miktarı artıkça çekilen akımda artmaktadır. Kapasitif güç hat akımının karesi ile orantılı olarak değiĢmektedir. Artan yük miktarı ile beraber çekilen akımda artacağından iletim hattındaki gerilim düĢümü de artar. Genel olarak TCSC seri kompanzasyon amaçlı kullanıldığından dolayı iletim hattını kapasitesini artırmaktadır (Eminoğlu 2003). TCSC'nin genel devre Ģeması ġekil 3.19 ile belirtilmiĢtir.
ġekil 3.19. TCSC‟nin temel devre bileĢenleri (Song ve Johns 2008)
TCSC ile güç sistemindeki reaktansın kontrolü tristörlerin tetikleme açılarının ayarlanması ile sağlanır. TCSC yapısında bulunan tristörlerin tetikleme açılarının değiĢtirilmesi ile TCSC‟nin çalıĢma modları değiĢtirilebilir. Yani kapasitif veya endüktif modda çalıĢtırılabilir. Bu denetleyici ile güç sisteminin dinamik performansı ve geçici kararlılığı iyileĢtirilip ve SSR‟yi ( Senkron Altı Rezonans) önlemek amacıyla tercih edilir (Song ve Johns 2008). TCSC‟nin kontrol üniteli devre yapısı ġekil 3.20 ile verilmiĢtir.
27
ġekil 3.20. TCSC devre yapısı (DöĢoğlu 2010)
TCSC‟nin temel devre karakteristiğinde kapasitör grupları ve tristör devre tetiklemesindeki reaktanslara bağlı olarak değiĢmektedir. Kapasitif reaktansın ifadesi;
(3.7) ġeklinde hesaplanır. XC=XV durumu için oluĢan rezonansa karĢılık gelen
rezonans tetikleme açısı RX=XC/XL ifadesine bağlı olarak değiĢmektedir (Canizares ve ark. 1999).
TCSC‟nin temel devre karakteristiği sisteminde kullanılan kapasitör blokları ve tristörlerin devre bileĢeni reaktansına bağlı olarak değiĢtiğinden kollara ait reaktanslar aĢağıdaki gibi yazılabilir;
(3.8)
(3.9)
Ġfadeleri ile elde edilir. ifadesi güç sisteminin nominal frekansına eĢit olacağından sistemdeki rezonans frekans tristörlerin endüktans ve kapasitenin bulunması ile elde edilmiĢ olur.
TCSC ile yükselme faktörü kapasitörün reaktansının kontrolü ve toplam reaktans arası olarak tanımlanmaktadır ve KB ile ifade edilmektedir.
28
TCSC‟nin kapasitif veya endüktif çalıĢma durumuna bağlı olarak yükselme faktörü pozitif veya negatif olabilir. Yükselme faktörü değeri birden büyük olması istenmez. Seri kapasitör reaktansı, frekans ile doğru orantılı olarak değiĢir (Song ve Johns 2008).
3.1.3. BirleĢtirilmiĢ Seri ve Paralel Bağlı Facts Denetleyicileri
3.1.3.1. UPFC (BirleĢtirilmiĢ Güç AkıĢ Denetleyicisi - Unified Power Flow Controller)
BirleĢtirilmiĢ güç akıĢı kontrolü (UPFC), iletim hattını paralel ve seri olarak denetleyen FACTS denetleyicisidir. UPFC denetleyicisi iletim hattına seri bağlantısında bir SSSC gibi, paralel bağlantısında ise STATCOM gibi çalıĢmaktadır. SSSC‟nin çıkıĢı ile Ģönt bağlı STATCOM‟un çıkıĢı arasında iki yönlü olarak aktif güç kontrolü yapılmaktadır. UPFC‟nin hem seri hem de paralel bağlantısından dolayı hat gerilimi, hat empedansı, hat açısı ve hattan akan aktif ve reaktif güçler kontrol edilmektedir. UPFC denetleyicisinin gerilimi ile reaktif güç, açısı ile aktif güç denetlenmektedir. Ayrıca UPFC, hat baĢındaki ve hat sonundaki gerilimleri arasındaki etkin faz açısının kontrol edilmesi için iletim hattına eklenen gerilimi faz kaydırıcı olarak kullanmaktadır (Karadeniz 2006). UPFC‟nin genel yapısı aĢağıda ġekil 3.21 ile verilmiĢtir.
ġekil 3.21. UPFC‟nin seri senkron gerilim kaynağı modeli (Song ve Johns 2008)
UPFC‟nin genel yapısına ele alındığında STATCOM iletim sistemine paralel, SSSC ise iletim sistemine seri bağlanmaktadır. Bu yapıdaki STATCOM ile SSSC arasında doğru gerilim kapasitörü bulunmaktadır. UPFC‟nin yapısındaki SSSC güç sistemine 0˚ 360˚ faz açısı arasında değiĢen bir gerilim ilave edilerek güç sistemi arasında aktif ve reaktif güç alıĢveriĢini yapmaktadır. SSSC‟nin kendi içerisindeki aktif