Dijital Kontrollü Çok Eksenli Titreşim Masası Geliştirilmesi
Tam metin
Şekil
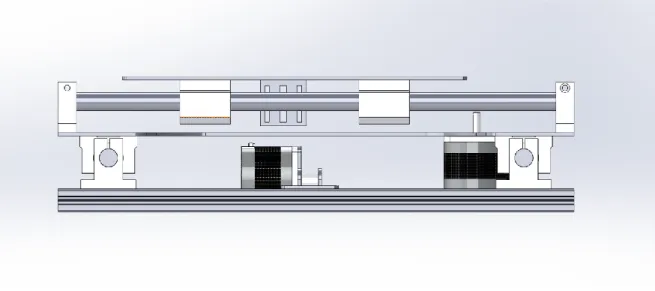
![Şekil 3.1 Planlanan Titreşim masasından Konsept Şeması (Solidworks)[35]](https://thumb-eu.123doks.com/thumbv2/9libnet/3580886.19923/20.892.157.741.432.641/şekil-planlanan-titreşim-masasından-konsept-şeması-solidworks.webp)





Outline
Benzer Belgeler
2- Tek eksende azimuth açısına göre güneĢi izleyen 33º eğimli sistem 3- Kuzey- Güney yönünde 6º eğimli bir eksenli güneĢ izleyicili sistem 4- Ġki eksenli (yatay-
Yüksek performansı ve esnekliği sayesinde HURCO VMXi Serisi İşleme Merkezleri geniş palet uygulamalarına ve çalışma koşullarına uygundur. Küçük ölçülerden,
Bu çalışma ile Türkiye’de turizm rehberliği lisans eğitimi veren üniversitelerin uygulamış oldukları staj politikalarının incelenmesi, benzerlik ve
Enerji do lu, işini seven, dobra dobra konuşan, açık saçık ama zekâ ürünü fıkraları, ağız dolusu gülüp, ağız dolu su sövmeleriyle dostlarının gönlünde yer
Kişisel Arşivlerde İstanbul Belleği Taha
Fakat aruzun memdııd ve maksur heceleri içinde serbst nazını olaııııyacağı için buna serbest miistezad demek daha doğru idi.. Bunu evvelce kendisine
Kısaca, nasıl ki Eldem’in Türk evinin çözümlenmesinde ortak plan motifinin bağlayıcı ögesi sofa ise, Anadolu-Türk evi veya Anadolu evi olarak nitelenen evler için
anahtarlar olarak rol görüyor ve ACVR1 de, kemik oluflumu proteinleri için önemli almaçlardan biri.. Araflt›rmac›lar, FOP hastal›¤›n›n, 509 amino asit uzunlu¤undaki
