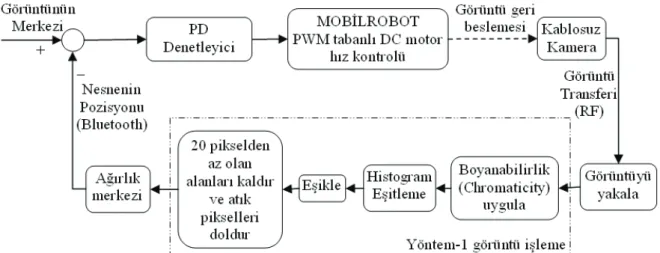
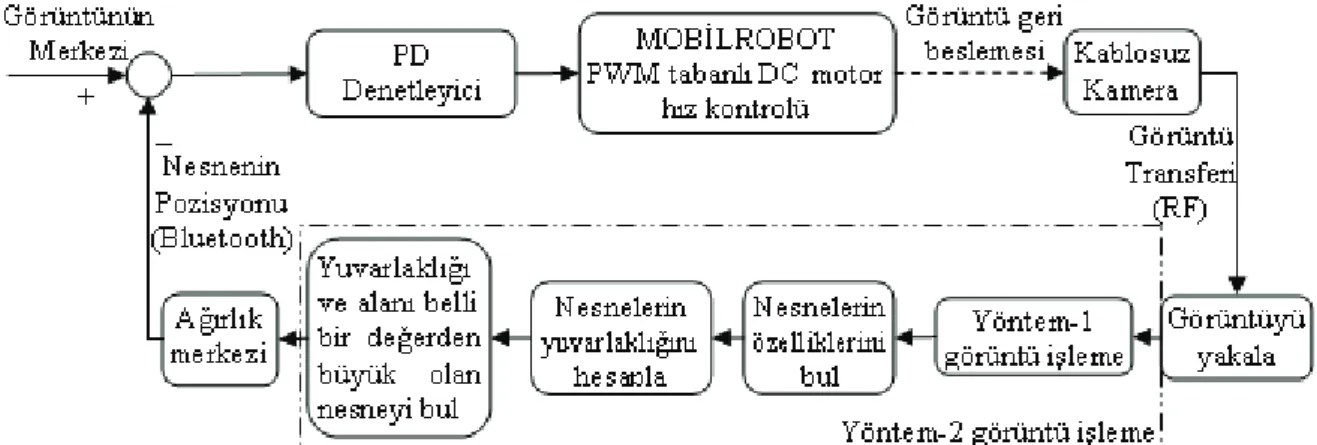
Görme tabanlı mobil robot ile farklı renklerde nesnelerin gerçek zamanlı takibi
Tam metin
Şekil

Benzer Belgeler
G öl başın da padişabın iiç
Son olarak bulgular Türkiye asgari ücreti ile ontolojik ve kurumsal olarak karşılaştırılmış ve Türkiye’de asgari ücret konusunda neoklasik paradigmanın hâkimiyetinin
Yayınları arasında çıkan ve sınır lı bir plân içinde kaldığı için iste nilen bir inceleme seviyesine çı kamayan Sait Faik Abasıyanık adlı kitabımızdan
İşte, yeni ‘nehir romanı’ ‘Bir Ada Hikâyesi’nin ilk iki kitabı Fırat Suyu Kan Akıyor Baksana, Karıncanın Su İçtiği bir anıt gibi orada duruyor..
1) Sivil toplum süreciyle; 2) Jürgen Haber- mas’ın işaret etmiş olduğu gibi, bir kamu alanı nın teşekkülü, yani toplum, insan, sanat ve bi limin serbestçe
Etken temas ve su yoluyla balýklar yavru alabalýk dalaðý, hastalýktan þüpheli ve arasýnda hýzlý bir þekilde yayýlarak bulaþtýðýn- yeni ölmüþ yavru
Elde edilen bulgular yorumlandığında uygulama yapılan işletme için daha önceden gerçekleştirilen yenileşim faaliyetlerinin yetersiz olduğu bilinmesine ve
Bununla birlikte, turizm çekiciliklerini geli ştirmek arayışında olan bir destinasyon yönetimi turistik cazibe merkezlerini zenginle ştirmek için yeni müzeler açabilmekte,
