Harmonik içeren güç sistemlerinin gerilim kararlılığının yük modellemeleri ve facts elemanları bakımından incelenmesi
Tam metin
Şekil

Benzer Belgeler
Rotor açısı kararlılığı da, gerilim kararlığında olduğu gibi reaktif güç kontrolünden etkilenir. Periyodik olmadan artan açıları içeren küçük bozucu
Dünyada nüfusun artması ve sanayideki gelişmelere bağlı olarak elektrik enerjisine duyulan ihtiyaç her geçen gün fazlalaşmaktadır. Yaşamın neredeyse en önemli parçası
Şekil 3.5.. Burada elde edilen kritik değerler ve marjin, n-baralı sistemi temsil eden ve k. baradan elde edilmiş bir Thevenin Eşdeğerine dayanmaktadır. n-baralı sistemde
Genetik algoritmanın genel çalışma mantığı şekil 3.1’de verilmektedir. Genetik Algoritmanın adımları sırası ile genel olarak aşağıda açıklanmaktadır. Çözümü
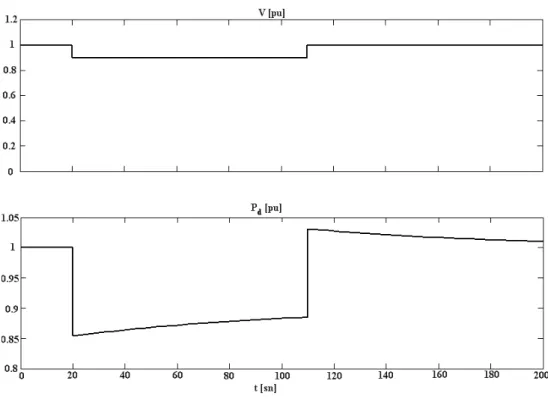
0 rad ile 1.4 rad arasındayken, sistemin depolanmış enerji yoğunluğunun pozitif değerler almakta olduğu görülmektedir. Buna göre sistem, 0<δ 4 <1.4 aralığında
Kendi özel stüd yosunda çizgi film yapımına zaman zaman eğilen ve bu uğraşı hiçbir maddi karşılık beklemeden armatörce sürdüren Tonguç Yaşar'ın
Daha da önemlisi, yerel yönetimler, kendi yetki alanlarında serbestçe yönetebilecekleri yeterli mali kaynaklara sahip olmalı ve yerel yönetimlerin maliyesi ulusal
İlgili Yönetmeliğe göre (Yönetmelik, 2004) kurum ve kuruluşlar, bilgi edinme hakkının etkin olarak kullanılabilmesi ve bilgi edinme başvurularından kaynaklanan
