Başlangıç değer problemlerinin nümerik integrasyonunda adım genişliği tespiti
79
0
0
Tam metin
(2) T.C. SELÇUK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ. BAŞLANGIÇ DEĞER PROBLEMLERİNİN NÜMERİK İNTEGRASYONUNDA ADIM GENİŞLİĞİ TESPİTİ. Gülnur ÇELİK KIZILKAN. YÜKSEK LİSANS TEZİ MATEMATİK ANABİLİM DALI. Bu tez 23/07/2004 tarihinde aşağıdaki jüri tarafından oybirliği / oyçokluğu ile kabul edilmiştir.. Yrd. Doç. Dr. Kemal AYDIN. Prof. Dr. Şaziye YÜKSEL. Prof. Dr. Ali SİNAN. (Danışman). (Üye). (Üye). ii.
(3) ÖZET Yüksek Lisans Tezi BAŞLANGIÇ DEĞER PROBLEMLERİNİN NÜMERİK İNTEGRASYONUNDA ADIM GENİŞLİĞİ TESPİTİ Gülnur ÇELİK KIZILKAN Selçuk Üniversitesi Fen Bilimleri Enstitüsü Matematik Anabilim Dalı Danışman: Yrd. Doç. Dr. Kemal AYDIN 2004, 71 sayfa Jüri: Yrd. Doç. Dr. Kemal AYDIN Prof. Dr. Şaziye YÜKSEL Prof. Dr. Ali SİNAN. Bu çalışmada, Cauchy probleminin nümerik integrasyonu için Picard teoremi tabanlı değişken adım genişliği seçimi ve hata analizi tabanlı değişken adım genişliği seçimi elde edilmiştir. Bu seçimlere bağlı olarak adım genişliği ve yaklaşık çözüm hesaplayan algoritmalar verilmiştir. Bu algoritmalarda, üzerinde çalışılan konveks kümenin yapısına bağlı olarak oluşabilen bazı problemleri ortadan kaldırmak için Picard teoremi ve hata analizi tabanlı değişken adım genişliği seçimi verilerek bu seçime bağlı her bir adımda adım genişliği, yaklaşık hesap ve oluşan lokal hatayı hesaplayan bir algoritma elde edilmiştir. Verilen algoritmalarla ilgili nümerik örnekler verilmiştir.. Anahtar Kelimeler: Cauchy Problemi, Adım Genişliği Seçimi, Picard Teoremi, Nümerik İntegrasyon, Lokal Hata, Global Hata. iii.
(4) ABSTRACT Master Thesis ON THE FINDING OF STEP SIZE IN THE NUMERICAL INTEGRATION OF INITIAL VALUE PROBLEM Gülnur ÇELİK KIZILKAN Selçuk University Graduate School of Natural and Applied Sciences Department of Mathematics Supervisor: Yrd. Doç. Dr. Kemal AYDIN 2004, 71 pages. Jury: Yrd. Doç. Dr. Kemal AYDIN Prof. Dr. Şaziye YÜKSEL Prof. Dr. Ali SİNAN. In this study, we have obtained that variable stepsize choice based on Picard theorem and variable stepsize choice based on error analysis for numerical integration of Cauchy problems. Depending on those choices we have given algorithms that calculates stepsizes and approximations for solutions. In order to defeat some problems arising from the structure of convex set on which the study is carried on, giving the variable stepsize choice based on Picard theorem and error analysis, an algorithm has been obtained which calculates depending on this choice stepsizes, approximations for solutions and local error taken place in each step. Some numerical examples related to given algorithm have been demonstrated.. Key Words: Cauchy Problems, Finding of Integration, Local Error, Global Error iv. Stepsize, Picard Theorem, Numerical.
(5) v.
(6) İÇİNDEKİLER. ÖZET ………………………………………………………………………………. iii ABSTRACT ……………………………………………………………………….. iv ÖNSÖZ ……………………………………………………………………………... v SEMBOLLER ……………………………………………………………………… vi 1. GİRİŞ …………………………………………………………………………….. 1 2. BİRİNCİ MERTEBEDEN CAUCHY PROBLEMİ …………………………..…10 3. NÜMERİK METOTLAR VE HATA ANALİZİ ………………………………..16 3.1. Metotlar ………………………………………………………………………...16 3.1.1. Euler metodu …………………………………………………………………16 3.1.2. Runge- Kutta metodu ………………………………………………………...17 3.2. Hata Analizi …………………………………………………………………....18 3.2.1. Euler metodu için hata analizi ………………………………………………..19 3.2.2. Runge-Kutta metodu için hata analizi ………………………………………..24 4. ADIM GENİŞLİĞİ STRATEJİSİ ……..…………………………………………29 4.1. Picard Teoremi Tabanlı Adım Genişliği Seçimi..……………………................29 4.2. Hata Analizi Tabanlı Adım Genişliği Seçimi ………………………………….36 4.3. Picard Teoremi ve Hata Analizi Tabanlı Adım Genişliği Seçimi……………....39 4.4. Pratik Adım Genişliği Seçimi….……………...………………………………..42 4.5. Adım Genişliği Kontrolü………………...……………………………………..42 5. ALGORİTMALAR………………………………………………………………44 5.1. Picard Teoremi Tabanlı Adım Genişliği İçin Algoritma……………………….44 5.2. Hata Analizi Tabanlı Adım Genişliği İçin Algoritma…………………………..45 5.3. Picard Teoremi ve Hata Analizi Tabanlı Adım Genişliği İçin Algoritma...........49 6. NÜMERİK ÖRNEKLER ………………………………………………………...51 7. DEĞERLENDİRMELER ………………………………………………………..67 8. KAYNAKLAR …………………………………………………………………..69. vii.
(7) ÖNSÖZ. Bu çalışma, Selçuk Üniversitesi Fen- Edebiyat Fakültesi Matematik Bölümü Öğretim Üyesi Yrd. Doç. Dr. Kemal AYDIN yönetiminde yapılarak, Selçuk Üniversitesi Fen Bilimleri Enstitüsü’ ne Yüksek Lisans Tezi olarak sunulmuştur. Tezimi büyük bir sabır ve titizlikle yöneten hocam Yrd. Doç. Dr. Kemal AYDIN’ a, tez çalışmam süresince artık geleneksel hale gelen Prof. Dr. Haydar BULGAK yönetiminde haftalık yapılan lisansüstü seminer programında çalışmalarımı anlatmama fırsat sağlayan ve bu vesileyle değerli öneri ve eleştirilerinden faydalandığım Prof. Dr. Haydar BULGAK’ a teşekkürlerimi ve saygılarımı sunarım. Aynı zamanda, çalışma esnasında beni maddi ve manevi desteğinden yoksun bırakmayan sevgili ailem ve eşim Mustafa KIZILKAN’ a da teşekkürü bir borç bilirim.. Gülnur ÇELİK KIZILKAN. v.
(8) KULLANILAN SEMBOLLER. t i : Grid noktaları hi : i inci adımdaki adım genişliği x(t i ) : Cauchy probleminin tam çözümünün t i noktasındaki değeri y i :Cauchy probleminin t i noktasındaki nümerik metot kullanarak elde edilen yaklaşık çözümünün değeri. LE i : i inci adımda oluşan lokal hata GE i : i inci adımdaki global hata. h * : Pratik adım genişliği parametresi. : İstenilen hata seviyesi. L : i inci adımda lokal hata için istenilen hata seviyesi i. g : Global hata için istenilen hata seviyesi. vi.
(9) 1. 1. GİRİŞ. Diferensiyel denklemler, birçok fiziksel problem ve olayı matematiksel olarak tanımlamaya yarar. Dolayısıyla diferensiyel denklemlerin analitik çözümü için doğru çözüm işlemleri bulmak önemli bir problemdir.. x f (t , x ) x(t 0 ) x0 , t0 t T. (1.1). Cauchy problemini ele alalım. Hemen şu sorular akla gelir: Problemin çözümü var mı? Eğer varsa hangi şartlarda tektir? Literatürde bu soruların cevabını Picard Teoremi vermektedir. Ayrıca, genellikle pratikte tam çözüm bulmak ya mümkün değildir yada hesaplanması çok zordur. Dolayısıyla son yıllarda, yaklaşık çözüm bulmak için nümerik çözüm yöntemleri oldukça önem kazanmıştır.. 1.1. Problemin Tanıtımı. Nümerik metotlar iteratif olduklarından (1.1) Cauchy probleminin çözümünün hesaplanmasında büyük kolaylıklar sağlamasına rağmen nümerik metot kullanılması ile elde edilen çözüm problemin tam çözümün yerine kullanılabilecek kadar yakın olmayabilir. Bu nedenle nümerik metotlarla hesaplama yapılırken adım genişliği seçimi öne çıkmaktadır. Literatür çalışmalarının çoğunda sabit adım genişliği seçilerek hesaplama yapılmıştır. Fakat sabit adım genişliği seçildiğinde yaklaşık çözümün tam çözümden uzaklaşmaması için adım genişliğinin çok küçük seçilmesi gerekmektedir. Bu ise pratik değildir. 2001-2002. eğitim öğretim. yılında. Uygulamalı. Matematik. Araştırma. Merkezi’nde Prof. Dr. Haydar Bulgak yönetiminde yapılan lisansüstü seminer çalışmalarında, Cauchy probleminin nümerik integrasyonunda Picard Teoremi üzerinde temellenen adım genişliği stratejileri, N. Chumakova, H. Bulgak, A. Bulgak ve K. Aydın tarafından tartışılmıştır. Ancak bu çalışmalar sonuçlandırılmamıştır. Bu tez çalışması bu seminerden esinlenerek yapılmıştır..
(10) 2. Bu çalışmada (1.1) Cauchy probleminin nümerik integrasyonuda kullanılacak nümerik metodun analitik çözüme yakın sonuçlar vermesi için uygun hj- adım genişliği belirlemek hedeflenmiştir.. 1.2. Literatür Özeti. (1.1) Cauchy probleminin nümerik çözümü için kullanılan birçok nümerik metot vardır. bunlardan birisi üç adım BDF (backward differentiation formulae) metodudur. Guglielmi ve Zennaro (2001) çalışmalarında; j,i ler h j ye bağlı fonksiyonlar olmak üzere. u j 3 j , 2 u j 2 j ,1u j 1 j , 0 u j ,(j=0,1,…). homojen lineer fark denkleminin companion matrisini ele alarak üç adım BDF metodunun kararlı olmasını sağlayan h j t j 1 t j (j=0,1,…) adım genişliği spektral yarıçap yardımıyla elde etmişlerdir.. Beyn ve Garay (2002); homojen birinci mertebeden diferensiyel Cauchy probleminden hareketle homojen olmayan yarı lineer diferensiyel Cauchy problemi için adım genişliği önermişlerdir. Ancak, tahminlerinin adım genişliği seçimine temel bir kural oluşturmak için yeterli olmadığını belirtmişlerdir.. Rice ve Do (1995), adım genişliğini kontrol eden iki metottan bahsetmişlerdir. Bunlardan birisi Bailey (1969) tarafından önerilen bir metottur. Herhangi bir integrasyon metoduna uygulanabilen bu metotta y = (y1,y2,…,yN)T ve y(tn) = yn vektörü için y= |y(tn+1)-y(tn)| farkı hesaplanır. y nin i-inci bileşeni için a) eğer yi/yi<0,01 ise h adım genişliğinin yerine 2 h alınır. b) Eğer yi/yi>0,1 ise h adım. genişliği yerine h /2 alınır. c) a ve b şıkları sağlanmıyorsa h adım genişliği aynı kalır. Rice ve Do, Bailey’ in adım genişliği kontrolü ile ilgili önerdiği bu metot hakkında detaylı bilgi vermemiştir..
(11) 3. Rice ve Do’ nun bahsettiği ikinci metot Michelsen (1976) nın önerdiği bir metottur. Michelsen O( h 3 ) kesme hatası ile üçüncü mertebeden bir metot kullanarak h en 1 y n 1 ( ) y n 1 (h) olmak üzere 2. h 1 y n 1 y n 1 ( ) en 1 2 7. h elde etmiştir. Burada y n1 (h) ve y n1 ( ) , tn+1 noktasında nümerik metotta sırasıyla h 2 h ve h /2 adım genişliği kullanılarak elde edilen çözümdür. yn+1 ise y n1 (h) ve y n1 ( ) 2. çözümlerinden elde edilen ve t = tn+1 noktasında gerçek çözüme daha yakın olan bir tahmindir. Verilen toleransı için q max | i. en 1. . |i. tanımlanmıştır. Eğer q>1 ise q<1 oluncaya kadar tn adımındaki işlemler h adım genişliği yerine h /2 alınarak tekrarlanır. q<1 olduğunda adım genişliğini. hn 1 hn min[( 4q ). 1. 4. ,3]. şeklinde vermişlerdir.. Sardar ve Higham (1997), Huthinson denklemini ele almışlardır. R , reel sayılar cümlesi olmak üzere R N de kısmi fark Hutchinson denklemini. d (t ) (N 2 ) M (t ) (t ) , t 0 dt. (t ) (t ), t [ ,0].
(12) 4. şeklinde vermişlerdir. Burada >0 difüzyon katsayısı, >0 denklemdeki gecikme miktarı ve M, çalışmalarında tanımladıkları N boyutlu karesel matristir. (t ) ya yaklaşım için q( t ) Lagrange enterpolasyon polinomu kullanmışlardır.. f (t , (t ), q (t )) (N 2 ) M (t ) q (t ) R N. olmak üzere n-inci adımda adım genişliği için aşağıdaki algoritmayı vermişlerdir:. k1 f (t n , n , q (t n ) k 2 f (t n t n , n t n k1 , q (t n t n )) 1 t n ( k 2 k1 ) 2 TOL 12 ( ) t n , (0,1) || est n 1 ||. est n 1 t new. TOL: Kullanıcının belirlediği parametre. Eğer || est n 1 || TOL ise adım genişliği kabul edilir ve t n 1 = t new alınarak işleme devam edilir. || est n 1 || > TOL ise || est n 1 || TOL oluncaya kadar. t n 1 = t new. alınarak işleme devam edilir.. Conte ve Boor (1980), p-inci mertebeden Runge- Kutta metodunun lokal asimptotik hata açılımını. y h ( x n 1 ) = y ( x n 1 ) + C ( x n 1 ) h p + O(h p 1 ). şeklinde vermişlerdir. Burada y h ( x n 1 ) ; Runge- Kutta metodunda h adım genişliği ile x = x n 1 noktasında y(x) çözümüne yaklaşımı gösterir. C ( x n 1 ) , x = x n 1 noktası ile y f ( x, y ) fonksiyonuna bağlı olan bir sabittir ve. y h ( x n 1 ) y h ( x n 1 ) h Cn ( ) p 2 2 1 2p.
(13) 5. dir. < olacak şekildeki ve verilen lokal hata toleransları ve. | y h ( x n 1 ) y h ( x n 1 ) | Dn . 2. 2 p 1. olmak üzere Runge- Kutta metodu için adım genişliği kontrolünü aşağıdaki şekilde vermişlerdir: i) <. Dn < ise; y h ( x n 1 ) değeri kabul edilir ve aynı h adım genişliği h 2. kullanılarak x n 1 noktasından integrasyona devam edilir. ii). Dn > ise; bu durumda hata çok büyüktür. h yerine h /2 alınır ve x= x n h. noktasında yeniden integre edilir. iii). Dn < ise; istenenden daha iyi bir doğruluk elde edilmiştir. Dolayısıyla h. y h ( x n 1 ) değeri kabul edilir. h yerine 2 h alınarak x n 1 noktasından integrasyona 2. devam edilir. Conte ve Boor (1980) çalışmalarında ele aldıkları bu yöntemi kullanarak, adım genişliğini iki ile çarpma veya iki ile bölme gibi bir sınırlandırma olmaksızın adım genişliği kontrolü için ikinci bir yöntem vermişlerdir. Çözümde bir adım sonra 2 C n (h / 2) p 1 h olacak şekilde h adım genişliği araştırmışlardır.. Dn 2 C n (h / 2) p 1. olduğunu göz önüne alarak h adım genişliğini. 1. h h(h / Dn ). olarak bulmuşlardır.. p.
(14) 6. Wille (1998) de Adams metotları için hata kontrolü ele alınmıştır. Bu metotlar için. hn t n t n 1 olmak üzere hata tahmini E (hn ) ile verilmiştir. Wille bu. çalışmasında |C|<1 olacak şekilde bir sabit ve tol kullanıcının belirlediği bir sabit olmak üzere E (h * ) =Ctol şeklindeki bir denklemin çözümü olan h * adım genişliğini tanımlamıştır. Böylece E (h * ) =Ctol denkleminin çözümü, non- trivial polinomun kökünü bulma problemine indirgenmiş olur.. Hairer ve Wanner (1991) nümerik metotlar için R(z) kararlılık fonksiyonu ve SC- kararlılık (step control stability) kavramlarını tanımlamışlardır. R(z) kararlılık fonksiyonu yardımıyla nümerik metotların SC- kararlılık şartını elde etmişlerdir.. Usman ve Hall (1998) nümerik çözümler için sıkça kullanılan bir başka metot olan Adams metotlarını ele almışlardır. E n 1 lokal hata tahmini, k ve k+1-inci mertebeden iki doğrulama formülü arasındaki fark ve tol (tolerance), kullanıcının belirlediği ihmal edilebilen hata derecesi olmak üzere adım genişliğini;. hn 1 (. tol 1k 1 ) hn ,0 1 || E n 1 ||. (1.2). olarak vermişlerdir.. Hall ve Usman (1999), 1998’ de yaptıkları çalışmalarındaki teoriyi kullanarak değişken mertebeli Adams kodu için modifiye edilmiş adım genişliği ve mertebe stratejisi geliştirmişlerdir. Çalışmalarında, ERK; k ve k+1-inci mertebeden iki doğrulama formülü arasındaki fark, tol (tolerance); kullanıcının belirlediği ihmal edilebilen hata derecesi ve rtol; kullanıcının tol değerinden oluşturduğu rölatif tolerans (hata) olmak üzere olmak üzere (1.2) e benzer olarak. fact (. 0,5tol 1k 1 ) ERK.
(15) 7. sayısını tanımlamışlardır. Buna göre yeni adım genişliğini. hnew rhold. şeklinde vermişlerdir. Burada r aşağıdaki gibi seçilir:. r 2. fact 2. 1. 1 fact<2. 0,9. 0,9 fact<1. fact. 0,5 fact<0,9. 0,5. fact<0,5. Adım genişliği, kararlılıkla sınırlandırıldığı zaman adım genişliğinde titreşimler gözlenmektedir. Usman ve Hall (2000) adım genişliğinin davranışını düzleştirecek alternatif bir adım genişliği önermişlerdir. 1998 deki çalışmalarını, Runge- Kutta metodu için Gustafsson (1981) tarafından geliştirilmiş olan PI- adım genişliği kontrolcüsünü (controller) ile birlikte düşünerek bu fikri Adams metotları için değerlendirmişlerdir. E n 1 , k ve k+1-inci mertebeden iki doğrulama formülü arasındaki fark, H n 1 = hn 1 ve tol (tolerance), kullanıcının belirlediği ihmal edilebilen hata derecesi olmak üzere Adams metotları için. H n 1 (. tol || E n || ) ( ) Hn ,0 1 || E n 1 || tol. elde etmişlerdir. Burada ve değerleri , kararlılık matrisinin spectral yarıçapı her zaman 1 den küçük olacak şekilde seçilmelidir.. Carroll (2002), yine başlangıç değer problemlerinin çözümünün var ve tek olması için gereken kavramlar verilmiştir. Ayrıca tek adım metotları hakkında genel bilgi verilerek bazı tek adım metotlarının hata kontrolü için algoritma verilmiştir..
(16) 8. Aydın et al. (2001) de (1.1) Cauchy probleminin çözümünün nümerik metotla hesaplanmasından kaynaklanan lokal kesme hatası ve global hata kavramları ele alınmıştır. Sabit adım genişlikli Euler metodu için lokal hata ve global hata analizleri incelenmiştir.. Bulgak (2000), pratik düzenli interval matris kavramı tanımlamış ve interval matrisin pratik düzenli olup olmadığını tespit eden bir algoritma vermiştir. Bulgak ve Bulgak (2001) de de, interval matrislerin pratik terslenebilirliği ile ilgili bu algoritmaya yeniden yer verilmiştir. Tez çalışmamızda, interval matrisler için verilen bu algoritma ve pratiklik kavramı Cauchy problemi için değerlendirilmiştir.. Cauchy probleminin nümerik çözümleri ile ilgili literatür çalışmalarının çoğunda, maalesef çözümün varlığı ve tekliği incelenmeden çözümler araştırılmıştır. Bu durum, Cauchy probleminin çözümleri için bazı sakıncaları beraberinde getirmektedir. Mesela çözümün olmadığı bölgede probleme çözüm aranabilir ve hatta bir yaklaşık çözüm verilebilir. Bu ise olabilecek en kötü değerlendirmedir. H. Bulgak henüz basılmamış olan “Diferensiyel Denklemler” isimli kitabında, Brock ve Malliaris (1989) ve Carroll (2002) Cauchy probleminin çözümünün var ve tek olduğunu gösteren Picard Teoremini vermiş, Cauchy problemlerinin çözümünde Picard teoreminin oynadığı rolü incelemişlerdir.. 1.3. Tezin Yapısı. Bu tez çalışması altı bölümden oluşmaktadır. 1. bölümde; problem tanıtılmış ve literatür özeti verilmiştir. 2. bölümde; iyi bilinen. x f (t , x ) x(t 0 ) x0 , | t t 0 | a, | x x0 | b. (1.3).
(17) 9. birinci mertebeden Cauchy probleminin çözümünün var ve tek olduğunu gösteren Picard teoremi (lokal varlık ve teklik teoremi) ve ispatı incelenmiştir. Bu bölümde incelenen Picard teoremi dördüncü bölümde kullanılmıştır. 3. bölümde; (1.3) Cauchy problemine yaklaşık çözüm bulmak için nümerik metotlar ele alınmış bu metotlar için lokal kesme hatası ve global hata kavramları incelenmiştir. 4. bölümde; Picard teoremi tabanlı adım genişliği seçimi incelenmiştir. Daha sonra literatürde sıkça karşılaşılan hata tahminine göre adım genişliği belirleme stratejisinden fikir edinilmiş ve üçüncü bölümde incelenen hata analizine göre Hata analizi tabanlı adım genişliği seçimi verilmiştir. Son olarak verilen bu iki adım genişliği seçimi fikri birleştirilerek Picard teoremi ve Hata analizi tabanlı adım genişliği seçimi verilmiştir. 5. bölümde; dördüncü bölümde verilen adım genişliği stratejileri için adım genişliği ve (1.3) Cauchy problemi için yaklaşık çözüm veren algoritmalar verilmiştir. 6.bölümde; beşinci bölümde verilen algoritmalarla ilgili nümerik örnekler verilmiştir. Bu bölümde yapılan hesaplamalarda, MVC- Matrix Vector Calculator kullanılmıştır. Grafik çizimleri için de Graphics Constructor 2.0 programı kullanılmıştır. 7.bölümde ise bu tez çalışmasının değerlendirilmesi yapılarak elde edilen sonuçlar verilmiştir..
(18) 10. 2. BİRİNCİ MERTEBEDEN CAUCHY PROBLEMİ. D ={(t,x): | t t 0 | a, | x x0 | b} bölgesi üzerinde. x f (t , x ) x(t 0 ) x0. (2.1). birinci mertebeden Cauchy problemini ele alalım. Diferensiyel denklemlerdeki temel problemin, çözümlerin varlığı ve tekliği üzerine olduğu bilinmektedir. Bu kısımda (2.1) birinci mertebeden Cauchy probleminin çözümünün varlığı ve tekliği ile ilgili kavramlar incelenmiştir. (2.1) Cauchy probleminin çözümünün varlığı ve tekliği ile ilgili kavramlardan birisi Lipschitz şartıdır. ( t , x1 ), ( t , x 2 ) D olmak üzere | f ( t , x1 ) - f ( t , x 2 )| L | x1 - x 2 | olacak şekilde bir L>0 sabiti varsa f ( t, x ) fonksiyonu R 2 deki D kümesi üzerinde. x değişkenine göre Lipschitz şartını sağlar denir. Burada L’ ye de Lipschitz sabiti denir (Estep 2002, Carroll 2002, Bulgak (Henüz basılmadı), Aydın et al. 2001, Miranker 1981, Brock and Malliaris 1989). Bu çalışma. konveks bölge üzerinde çalışılmıştır. Eğer ( t , x1 ) ve ( t , x 2 ). noktaları D kümesi içindeyken 0 1 aralığındaki her bir için ((1- )t1+ t2 , (1- ) x1 + x 2 ) noktası da D kümesine ait oluyorsa R 2 deki D kümesine konveks küme denir (Carroll 2002). Konveks küme aşağıdaki gibi de tanımlanabilir:.
(19) 11. Bir kümeye ait olan iki nokta düz bir çizgiyle birleştirildiğinde, bu çizgi üzerindeki bütün noktalar küme içinde kalıyorsa, kümeye konveks küme denir.. f ( t, x ) in Lipschitz şartını sağladığı, kısmi türevi yardımıyla pratik olarak aşağıdaki teoremle kontrol edilebilir. Teorem 2.1. D konveks kümesi üzerinde sürekli olduğunu varsayalım. Ayrıca f x. mevcut ve D bölgesi üzerinde sürekli olsun. Bu takdirde f , D üzerinde x. değişkenine göre Lipschitz şartını sağlar (Brock and Malliaris1989). Fakat bu teoremin tersi doğru değildir. Yani f fonksiyonu Lipschitz şartını sağlayabilir, ancak bu bölgede diferensiyellenebilir olmasına gerek yoktur. Örneğin; D ={( t, x ): | t |<1, | x |<1} bölgesi üzerinde f (t , x) = t 2 | x | fonksiyonunun Lipschitz. şartını sağlamasına ( | t 2 | x 2 |- t 2 | x1 || 1.| x1 - x 2 | olduğundan) rağmen. f (t ,0) tanımlı x. değildir. Şimdi çalışmamızda temel alınan Picard teoreminin ispatı için gerekli olan aşağıdaki lemmayı verelim. Lemma 2.1. Eğer f (t , x) , D bölgesinde sürekli ise (2.1) Cauchy problemi t. x(t ) x0 f ( s, x( s ))ds, | t t 0 | a. (2.2). t0. integral denklemine denktir (Brock and Malliaris 1989).. f (t , x) , D bölgesinde sürekli olsun. (2.2) de verilen integral denkleminin bir çözümünün oluşturulması için ard arda yaklaşımlar metodu olarak bilinen metodu tanıtalım. Bu metot ayrıca iterasyon metodu veya Picard metodu olarak da bilinir. Bu metot; x 0 (t ) , x1 (t ) ,…, x n (t ) fonksiyonları (2.2) integral denkleminin, dolayısıyla (2.1) Cauchy probleminin bir çözümüne ard arda yaklaşımlar olmak üzere.
(20) 12. x 0 (t ) = x0 t. x n (t ) = x0 + f ( s, x n 1 ( s ))ds , n=1,2,…. (2.3). t0. şeklinde tanımlanan fonksiyonların bir dizisini gerektirir. (2.3) ile tanımlanan { x n (t ) } fonksiyonlarının dizisi D0 üzerinde (2.2) nin çözümü olan bir x(t ) limit fonksiyonuna yakınsar. Aşağıda verilen Picard teoremi, (2.3) ard arda yaklaşımlar dizisi üzerine kurulmuştur. Teorem 2.2.(Picard teoremi) D ={( t, x ): | t t 0 | a, | x x0 | b} konveks bölgesi üzerinde (2.1) Cauchy problemini ele alalım. Eğer f (t , x) , D bölgesi üzerinde sürekli ise ve bu bölgede Lipschitz şartını sağlıyorsa bu takdirde (t 0 , x0 ) noktasını içine alan bir alt bölgede (2.1) Cauchy probleminin çözümü var ve tektir. Bu bölge. max | f ( , ) | M. ( , )D. ,. h = min(a,b/M). olmak üzere D0 ={( t, x ): | t t 0 | h , | x x0 | b } dir (Brock and Malliaris 1989, Bulgak (Henüz basılmadı), Carroll 2002, Estep 2002).. x. D0 x0+b. D. x0 x0-b t 0. t0-a. t0-a. t0. Şekil 2.1. t0+a. t0+a.
(21) 13. Örnek 2.1. D ={( t, x ): | t | 5, | x -2| 10} bölgesi üzerinde. x x x 2 , x ( 0) 2 Cauchy problemini ele alalım. Burada f (t , x) x x 2 dir. f (t , x) fonksiyonu D bölgesinde süreklidir ve Lipschitz şartını sağlar. O halde Picard teoremi gereği (0,2) noktasını içine alan bir alt bölgede bu Cauchy probleminin çözümü var ve tektir. Bu alt bölge;. max | f ( , ) | max | x x 2 | 132 M ve h min{5,. ( , )D. ( , )D. 10 } 0,0757576 132. olmak üzere. D0 {(t , x) :| t | 0,0757576, | x 2 | 10} dir. Problemin bir çözümünün varlığı temin edildikten sonra ayrıca problemin iyi konulmuş olması da temin edilmelidir. Yani, verilen problemde küçük bir pertürbasyon yapıldığında çözüme. küçük bir değişiklik olarak yansımalıdır. İyi. konulmuşluk çok yararlı bir şarttır. Çünkü, farklı bir problem çözülebilecek şekilde nümerik yaklaşımda pertürbasyonlar yapılabilir ve pertürbasyonlar yine küçük kalacak şekilde çözümün elde edilmesi istenir. Lipschitz şartı Cauchy probleminin iyi konulmuş olması için yeterli bir şarttır (Gear 1971). Bunu göstermek için 0 ve (t) küçük pertürbasyonlar olmak üzere z (t) = f (t , z ) + (t), |t-t0|<a,z(t0)= x0 + 0. (2.4). pertürbe edilmiş problemini ele alalım. (t), z ile x çözümü arasındaki fark olsun.. (t) = f (t , z ) - f (t , x) + (t), | (t0)|= | 0 | Buradan | (t)| | f (t , z ) - f (t , x) |+| (t)|, (L,Lipschitz sabiti).
(22) 14. dir. Eğer | (t)|< ,| 0 |< ise; bu eşitsizlik t0 dan t’ ye integre edilirse. | (t)| . [(L+1) e L (t t ) -1] L 0. elde edilir. Sonuç olarak, pertürbe edilmiş problemin çözümündeki en büyük değişiklik k, dan bağımsız bir sayı olmak üzere. max. t0 a t t 0 a. | (t)| . 1 [(L+1) e La -1]=k L. ile sınırlıdır. Böylece iyi konulmuşluk tanımı aşağıdaki gibi verilebilir. Tanım 2.1. istenildiği kadar küçük ve | 0 |< ve | (t)|< olmak üzere eğer (2.4) probleminin |z(t)- x (t)|< ,|t-t0|<a koşulunu sağlayan bir tek z(t) çözümü ve , pozitif sabitleri varsa, (2.1) Cauchy problemi iyi konulmuştur denir (Gear 1971). Cauchy probleminin iyi konulmuşluğunu gösteren teorem aşağıda verilmiştir. Teorem 2.3. D0 bölgesi üzerinde f, sürekli ve x değişkenine göre Lipschitz şartını sağlarsa (2.1) Cauchy problemi iyi konulmuş problemdir (Gear 1971). Örnek 2.2. x x , 0 t 2, x (0)=1 Cauchy problemini ele alalım. Bu problemin Lipschitz şartını sağladığı açıktır: | f (t , x 2 ) - f (t , x1 ) )| = | x 2 x1 | 1.| x 2 x1 |L=1 Şimdi bu problemin iyi konulmuş olduğunu gösterelim. z (t) =-z + (t), 0 t 2, z(0) = 1+ 0. pertürbe denklemini alalım..
(23) 15. (t) = -z+ x + (t), | (0)|= | 0 | . (t) = - (t)+ (t). | (t)|=| (t)|+| (t)|. de t | (t ) | e t dt. t. t. de t | (t ) | t t dt dt t e dt 0 0. | (t ) | (e t 1) | (t ) | (e 2 1). = e 2 -1 olmak üzere |z(t)- x (t)|< olacak şekilde , pozitif sabitleri vardır. Dolayısıyla ele alınan Cauchy problemi iyi konulmuştur. Çalışmamızın bundan sonraki kısmında Lipschitz şartını sağlayan Cauchy problemleri. ele alındığından, Teorem 2.3 ten dolayı bu problemlerin iyi. konulmuşluğu tekrar incelenmeyecektir..
(24) 16. 3. NÜMERİK METOTLAR VE HATA ANALİZİ. (2.1) Cauchy problemini göz önüne alalım. Cauchy probleminin tam çözümlerini bulmak her zaman kolay olmayabilir. Teorik olarak tam çözüm bulunsa bile pratikte bu çözümü hesaplamak zordur.Teorik olarak çözümü hesap edilemeyen Cauchy problemlerinin hesaplanması için algoritmik yapıya sahip olan nümerik metotlara ihtiyaç vardır. Nümerik metotlar Cauchy problemleri için yaklaşık çözüm verirler.. 3.1. Metotlar. Tez çalışmamızın dördüncü ve beşinci bölümlerinde nümerik metotlara ihtiyaç duyulmaktadır. (2.1) probleminin nümerik integrasyonu için kullanılan bir çok nümerik metot vardır. Fakat bu kısımda, sadece çalışmamızda kullandığımız Euler Metodu ve İkinci Mertebeden Runge- Kutta Metodu ele alınmış ve bu metotların hata analizleri incelenmiştir. Diğer nümerik metotlar için de aynı incelemeler yapılabilir.. 3.1.1. Euler metodu. (2.1) Cauchy problemi için. t i [t 0 a, t 0 a ] ve hi = t i t i 1 olmak üzere. Euler metodu. y i 1 y i hi 1 f i , i=0,1,…,n. (3.1). şeklinde tanımlanır. Burada eğer hi adım genişlikleri uygun seçilmezse Euler metodu gerçek çözüme yakınsamaz..
(25) 17. Euler metodunu bilgisayarda uygulamak çok kolaydır. Geometrik olarak Euler metodu, t i noktasındaki çözüm ile t i 1 noktasındaki çözüm eğrisinin teğetinden meydana gelir (Şekil 3.1). x. x(ti) x(ti)-x(ti-1) . x(ti-1). ti-1. ti. t. Şekil 3.1. 3.1.2. Runge- Kutta metodu. Cauchy problemlerinin çözümünde kullanımı en yaygın olan metotlardan birisi de Runge- Kutta metodudur. Farklı mertebelerde Runge- Kutta formülleri vardır. Fakat. burada en çok kullanılan. ikinci mertebeden Runge- Kutta formülü. verilecektir.. hi = t i t i 1 s1 f (ti , yi ) s2 f (ti hi 1 , yi s1hi 1 ) , i=0,1,…,n. olmak üzere ikinci mertebeden Runge- Kutta metodu. y i 1 y i hi 1 (a s1 +b s2 ), i=0,1,…,n (a,b Q;a+b=1).
(26) 18. şeklinde tanımlanır. Literatürde genellikle a=b=1/2 alınmaktadır. Bu çalışmada da a=b=1/2 alınacaktır. Buna göre ikinci mertebeden Runge- Kutta metodu yeniden yazılacak olursa y i 1 y i . 1 hi 1 ( s1 + s2 ),i=0,1,…,n 2. (3.2). şeklinde olur. Burada F( t i , y i ) = s1 + s2 denilirse. F( t i , y i )= s1 + s2 = f (t i , y i ) + f (ti hi 1 , yi s1hi 1 ). (3.3). olur. F( t i , y i ) fonksiyonuna artış fonksiyonu denir. Runge- Kutta metodu da Euler metodu gibi programlanması kolay olan bir metottur. Çözümün başında özel hesaplamalar gerektirmez. Ancak iç içe hesaplamalar içerdiğinden bilgisayar içinde kullanımı zaman alır.. 3.2. Hata Analizi. Nümerik metotlarla hesaplanan çözümün hatalı olacağı açıktır. Bu hatanın iki temel kaynağı vardır: 1. Sonlu fark yaklaşımındaki orijinal diferensiyel denklemin değişkeninin yerine koyulabilen elemanın sonucu olarak oluşan hata 2. Fark metotlarının aritmetik işlemlerini hesaplarken yapılan yuvarlama veya kesme hatası Şimdi, Cauchy probleminin nümerik metotlarla çözümünde kaçınılmaz olarak karşılaşılan iki önemli yaklaşım hatası olan lokal kesme hatası ve global hatayı ele alalım.. t i 1 noktasında nümerik metotla elde edilen yaklaşık çözüm y i 1 ile gösterilsin. y i 1 çözümünün gerçek çözümden ne kadar uzak olduğunu kontrol etmek için z (t ).
(27) 19. fonksiyonu tanımlansın. [ti-1 , ti) aralığında (2.1) Cauchy probleminin çözümü z (t ) olsun. z (t ). z (t) = f (t , z ). z (t i 1 ) = y i 1. (3.4). şeklinde alınsın. Lokal hata LEi ile gösterilir. ti noktasındaki lokal hata, nümerik metotla elde edilen y i çözümü ile z (t i ) çözümü arasındaki farktır (Aydın et al. 2001). Yani;. LEi = y i – z (t i ). (3.5). şeklindedir. Global hata ise; GEi = y i – x(t i ) ; i=0,… ,M. (3.6). veya onun maksimum değeri GE[0,T] = max |GEi| 0 i M. şeklinde ifade edilir (Golub and Ortega 1992, Aydın et al. 2001). Aydın et al. (2001) de sabit adım genişlikli Euler metodu için yapılan hata analizini şimdi değişken adım genişlikli Euler ve Runge-Kutta metotları için yeniden inceleyelim.. 3.2.1. Euler metodu için hata analizi. a) Lokal Hata Analizi: Lokal kesme hatası Euler formülünde ( t i 1 , y i 1 ) noktasına hi adım üstündeki ( t i , y i ) noktası verilmesiyle oluşur. (Şekil 3.2).
(28) 20. z. z(t2) z(t1). (ti-1,yi-1). LE2. LE1. (t2,y2). z(ti) (t1,y1). (t0,y0). t0. t1. ti-1. t2. ti. t. Şekil 3.2 [ti-1,ti] aralığında z (t ) fonksiyonu için ikinci mertebeden Taylor açılımını yazalım: z (ti ) z (ti 1 ) z(ti 1 )(ti ti 1 ) . 1 z( )(ti ti 1 ) 2 ; (ti 1 , ti ) 2!. Euler metodu için (3.5) tekine benzer olarak lokal kesme hatası;. |LEi |= | yi z (ti ) | = | yi 1 hi f i 1 [ z (ti 1 ) f i 1hi . 1 2 z( )hi ]| 2!. 1 2 |LEi |= | z( )hi | 2. şeklinde elde edilir. Bu durumda lokal hata için;. 1 1 1 2 2 2 |LEi| = | z( )hi | max | z( )hi | max | z( )hi | t t t t i 1 i i 1 i 2 2 2 1 |LEi| max | z( ) | hi2 t i 1 t i 2. (3.7).
(29) 21. şeklinde bir üst sınır elde edilir. Bu eşitsizlikten (2.1) Cauchy probleminin [ti-1 ,ti] alt aralığındaki lokal hatasının verilen problemin özelliklerine ve hi adımına bağlı olduğu görülmektedir.. b) Global Hata Analizi: Global hatanın (3.6) eşitliği ile ifade edildiği belirtilmişti (Şekil 3.3).. x. x(ti) GEi. yi x(ti-1) GEi-1. yi-1. ti-1. ti. t. Şekil 3.3. (2.1) Cauchy problemindeki f (t , x) f. i alalım. (3.1) Euler formülünde. L( t i 1 , hi ) nin aksaklığı belirttiği düşünülürse:. L(ti-1 , hi) =. x(t i 1 hi ) x(t i 1 ) f (t i 1 , x(t i 1 )) hi. olur. O halde LEi lokal hatası,. LEi = y i – z( t i ) = y i 1 hi f (t i 1 , z (t i 1 )) z (t i ) = z (t i 1 ) hi f (t i 1 , z (t i 1 )) z (t i ).
(30) 22. = hi L( t i 1 , hi ). (3.8). şeklinde olur. x ( t i 1 + hi ) nin Taylor açılımı,. x(t i 1 hi ) x(t i ) x(t i 1 ) x (t i 1 )hi . 1 x ( )hi2 , (t i 1 , t i ) 2!. idi. Eğer;. max | x ( ) | M ti. ti 1 ti. (3.9). ise bu takdirde Taylor formülünden,. hi2 | x(t i 1 hi ) [ x(t i 1 ) hi x (t i 1 )] | M ti 2. olur. LEi = hi L( t i 1 , hi ). olduğundan. hi2 |LEi| M ti O(h 2 ) 2. (3.10). eşitsizliği doğrudur. O halde;. GEi y i x(t i ) y i 1 hi f (t i 1 , y i 1 ) x(t i 1 ) hi x (t i 1 ) hi L(t i 1 , hi ) y i 1 hi f (t i 1 , y i 1 ) x(t i 1 ) hi f (t i 1 , x(t i 1 )) hi L(t i 1 , hi ) (3.11) GEi 1 hi [ f (t i 1 , y i 1 ) f (t i 1 , x(t i 1 ))] hi L(t i 1 , hi ). Buradan t i 1 noktasındaki GEi-1 hatasından GEi için tekrarlanan bir formül elde edilir..
(31) 23. (2.1) diferensiyel denkleminin sağ tarafındaki f (t , x) nin x e göre birinci türevi bütün t’ ler için sınırlı ve | x |< olduğundan. |. f (t , x) | M 0 x. dir. O halde ortalama değer teoremine göre, bazı (0,1) için. | f (t i 1 , y i 1 ) f (t i 1 , x(t i 1 )) ||. f (t i 1 , y i 1 (1 ) x(t i 1 ))( y i 1 x(t i 1 )) | x. dir. Bu ise, (2.1) başlangıç değer problemi için Lipschitz şartının kısmi türev yardımıyla ifade edilmesidir. Yani;. | f (t i 1 , y i 1 ) f (t i 1 , x(t i 1 )) | M 0 | GEi 1 |. eşitsizliği doğrudur. Buradan. | GEi || GEi 1 | hi M 0 | GEi 1 | hi | L(t i 1 , hi ) |. | GEi || GEi 1 | (1 hi M 0 ) M ti. hi2 2. (3.12). olduğu görülür.. | GEi || GEi 1 | (1 hi M 0 ) | LE i | (| GEi 2 | (1 hi 1 M 0 ) | LE i 1 |)(1 hi M 0 ) | LE i | | GEi 2 | (1 hi 1 M 0 )(1 hi M 0 ) | LE i 1 | (1 hi M 0 ) | LE i | | GE i 3 | (1 hi 2 M 0 )(1 hi 1 M 0 )(1 hi M 0 ) | LE i 2 | (1 hi 1 M 0 )(1 hi M 0 ) | LE i 1 | (1 hi M 0 ) | LE i | i. i. i. | GE 0 | (1 h j M 0 ) | LE j | ( (1 hk M 0 )) j 1. j 1. k j !.
(32) 24. i. bulunur. Burada. (1 h M j. 0. ) =1 alınmıştır. |GE0|=0 olduğundan. j i 1. i. i. | GE i | | LE i | ( (1 hk M 0 )) j 1. (3.13). k j 1. hi2 elde edilir. |LEi| M ti olduğundan bu eşitsizlik 2. i. | GEi | M t j j 1. h 2j 2. i. ( (1 hk M 0 )). (3.14). k j 1. şeklinde de yazılabilir.. 3.2. Runge- Kutta metodu için hata analizi. a) Lokal Hata Analizi: [ti-1 , ti] aralığında z (t ) fonksiyonu için üçüncü mertebeden Taylor açılımı. z (ti ) z (ti 1 ) z (ti 1 )(ti ti 1 ) . z (t i 1 ) hi z (t i 1 ) . 1 1 z (ti 1 )(ti ti 1 ) 2 z (ti 1 )(ti ti 1 ) 3 O(hi4 ) 2! 3!. hi2 h3 z (t i 1 ) i z (t i 1 ) O(hi4 ) 2 6. şeklindedir.. z (t i 1 ) y i 1 z (t i 1 ) f (t i 1 , y i 1 ) z (t i 1 ) ( f t f . f x )(t i 1 ) z (t i 1 ) ( f tt 2 f . f tx f 2 f xx f x f t f . f x2 )(t i 1 ).
(33) 25. olduğu göz önüne alınırsa. z (ti 1 hi ) = y i 1 + hi f (t i 1 , y i 1 ) +. hi2 ( f t f . f x )(t i 1 ) + 2. hi3 ( f tt 2 f . f tx f 2 f xx f x f t f . f x2 )(ti 1 ) + O(hi4 ) 6 elde edilir. Ayrıca. f (ti 1 hi , yi 1 hi f (ti 1 , yi 1 )) f (ti 1 , yi 1 ) hi ( f t f . f x ) . hi2 ( f tt 2 f . f tx f 2 f xx f x f t f . f x2 ) O(hi3 ) 2. olduğundan. yi yi 1 hi f (ti 1 , yi 1 ) . hi2 h3 ( f t f . f x ) i ( f tt 2 f . f tx f 2 f xx f x f t f . f x2 ) O(hi4 ) 2 4. dır. O halde Runge- Kutta metodu için lokal kesme hatası. |LEi |= | yi z (ti ) | =| [ yi 1 hi f (ti 1 , yi 1 ) . [ y i 1 + hi f (t i 1 , y i 1 ) +. =|. |LEi | . elde edilir.. hi2 h3 ( f t f . f x ) i ( f tt 2 f . f tx f 2 f xx f x f t f . f x2 )] 2 4. h3 hi2 ( f t f . f x ) + i ( f tt 2 f . f tx f 2 f xx f x f t f . f x2 ) ]+ O(hi4 ) | 6 2. hi3 ( f tt 2 f . f tx f x f t f . f x2 f 2 f xx )(ti 1 ) O(hi4 ) | 12. hi3 max | ( f tt 2 f . f tx f x f t f . f x2 f 2 f xx )( ) | 12 [ ti 1 ,ti ]. (3.15).
(34) 26. b) Global Hata Analizi: (3.2) Runge- Kutta metodu için L( t i 1 , y i 1 ) aksaklığı, F( t i 1 , y i 1 ) artış fonksiyonuna bağlı olarak. L( t i 1 , y i 1 ) =. x(ti 1 hi ) x(ti 1 ) 1 F (ti 1 , x(ti 1 )) hi 2. şeklinde yazılırsa. LEi = y i z (t i ) = y i 1 +. 1 hi F( t i 1 , y i 1 )- z (t i ) 2. = z (t i 1 ) +. 1 hi F( ti 1 , z (t i 1 ) ) – z (t i ) 2. = hi L( ti 1 , hi ). (3.16). olur. O halde;. (3.17). GEi yi x(ti 1 ). 1 hi F (t i 1 , y i 1 ) x(t i 1 ) hi x (t i 1 ) hi L(t i 1 , hi ) 2 1 GE i 1 hi [ F (t i 1 , y i 1 ) f (t i 1 , x(t i 1 ))] hi L(t i 1 , hi ) 2 1 GE i 1 hi [ f (t i 1 , y i 1 ) f (t i 1 , x(t i 1 )) f (t i 1 hi , y i 1 hi f (t i 1 , y i 1 )) f (t i 1 , x(t i 1 ))] LE i 2 y i 1 . f (t , x) nin x e göre birinci türevi bütün t’ ler için sınırlı ve aynı zamanda | x |< olduğundan. |. f (t , x) | M 0 x. dır. Çok değişkenli fonksiyonlarda ortalama değer teoremine göre; i) | f (ti 1 , yi 1 ) f (ti 1 , x(ti 1 )) ||. f (ti 1 , yi 1 (1 ) x(ti 1 ))( yi 1 x(ti 1 )) | , (0,1) x.
(35) 27. | f (ti 1 , yi 1 ) f (ti 1 , x(ti 1 )) | M 0 | GEi 1 |. ii) | f (ti 1 hi , yi 1 hi f (ti 1 , yi 1 )) f (ti 1 , x(ti 1 )) ||. . f ( (ti 1 hi ) (1 )ti 1 , x(ti 1 ))hi t. f (ti 1 , ( yi 1 hi f (ti 1 , yi 1 )) (1 ) x(ti 1 ))[ yi 1 hi f (ti 1 , yi 1 ) x(ti 1 )] | ; , (0,1) x. max |. t[ ti 1 ,ti ]. f (t , x) | M ti t. olsun. f (t , x) D bölgesinde sürekli olduğundan bu bölgede sınırlıdır. Yani;. | f (t , x) | M. dir. O halde;. | f (t i 1 hi , y i 1 hi f (t i 1 , y i 1 )) f (t i 1 , y (t i 1 )) | hi ( M ti M .M 0 ) M 0 | GEi 1 |. olur. i) ve ii) ye göre;. 1 | GEi || GEi 1 | hi [ M 0 | GEi 1 | hi ( M ti M .M 0 ) M 0 | GEi 1 |] | LEi | 2. (3.18). h3 1 (1 hi M 0 ) | GEi 1 | hi2 ( M ti M .M 0 ) + i max | ( f tt 2 f . f tx f x f t f . f x2 f 2 f xx )( ) | 12 (ti1 ,ti ) 2. olur. Euler metodunda yapılan iterasyona benzer olarak işlem yapılırsa. i. | GE i || GE 0 |. k 1. (1 hk M 0 ) . i. i. . . 1 [ hk2 ( M t k M .M 0 ) | LE k |] (1 h j M 0 ) 2 k 1 j k 1.
(36) 28. elde edilir. | GE0 | =0 olduğundan. | GEi |. i. i. . . 1 [ hk2 ( M t k M .M 0 ) | LEk |] (1 h j M 0 ) 2 k 1 j k 1. i. bulunur. Burada. (1 h M j. j i 1. 0. ) =1 olarak alınmıştır.. (3.19).
(37) 29. 4. ADIM GENİŞLİĞİ STRATEJİSİ. Cauchy problemlerine, nümerik metotlarla çözüm aramaya başlamadan önce problemin çözümünün hangi bölgede var ve tek olduğu incelenmelidir. Sadece çözümün var ve tek olduğu tespit edilen bölgede işlem yapılmalıdır. Çoğunlukla problem çözümlerinde bu gözden kaçmaktadır. f(t, x) fonksiyonunun sonsuz sürekliliğe sahip olduğu durumlarda Picard teoremi dikkate alınmadığı zaman genellikle nümerik metotlar yanlış çözümler bulmaktadır. İkinci bölümde ele alınan Picard teoremi, tek bir adımda çözümün var ve tek olduğu bölgeyi garanti eder. Dolayısıyla bu bölümde, Picard teoremi tabanlı adım genişliği seçimi incelenmiştir. Çözümün, var ve tek olduğu bölge tespit edildikten sonra nümerik metotla analitik çözüme ne kadar yaklaşılacağı sorusuna yanıt aranmalıdır. Genel durumlarda sonlu fark metotları bir tek adımda bile hata üretmeye başlar. O halde adım genişliği tespiti yapılırken, ele alınan nümerik metodun hata analizi dikkate alınmalı ve istenilen hata seviyesi geçilmeyecek şekilde adım genişliği seçilmelidir. Bu nedenle, bu bölümde ikinci olarak hata analizi tabanlı adım genişliği seçimi incelenmiştir. Daha sonra; Picard teoremi tabanlı adım genişliği fikri ile hata analizi tabanlı adım genişliği fikri birleştirilerek Picard teoremi ve hata analizi tabanlı adım genişliği seçimi verilmiştir. Verilen adım genişliği seçimleri ile teorik olarak istenilen bölge üzerinde yaklaşık çözüm elde edilebilir. Fakat, bu teorikte mümkün olmayabilir. Bulgak (2000) de interval matrisler için verilen pratiklik kavramı, burada adım genişliği için verilmiştir.. 4.1. Picard Teoremi Tabanlı Adım Genişliği Seçimi. D ={( t, x ): | t t 0 | a , | x x0 | b }. bölgesi üzerinde (2.1) Cauchy problemini.
(38) 30. x f (t , x ) x(t 0 ) x0. ele alalım. f (t , x) fonksiyonu için Picard teoreminin şartlarının sağlandığını kabul edelim. (2.1) Cauchy probleminin çözümünün var ve tek olduğu bölge. D0 ={( t, x ):| t t 0 | hˆ , | x x0 | b} olsun. [ti-1 , ti) aralığında (2.1) Cauchy probleminin çözümü z (t ) olmak üzere; kullanılan herhangi bir nümerik metodun ilk adımda. h1. adım genişliği,. max | f ( , ) | M olmak üzere Picard teoremindeki hˆ =min{a,b/M} parametresi. ( , )D. olarak seçilerek ( t1 , y1 ) noktası hesap edilir ve. D1 {(t , z ) :| t t1 | a, | z y1 | b}. bölgesi üzerinde. z f (t , z ) z (t1 ) y1. (4.1). Cauchy problemi göz önüne alınır. Picard teoremi gereği (4.1) Cauchy probleminin çözümünün var ve tek olduğu. D01 {(t , z ) :| t t1 | hˆ2 , | z y1 | b}. bölgesi elde edilir. h2 adım genişliği hˆ2 alınarak ( t 2 , y2 ) noktası hesaplanır. İşleme bu şekilde devam edilirse i inci adımda. Di 1 {(t , z ) :| t ti 1 | a, | z yi 1 | b}.
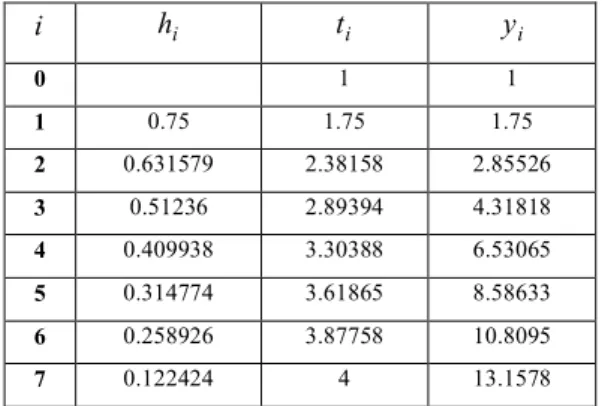
(39) 31. bölgesi üzerinde. z f (t , z ) z (ti 1 ) yi 1. (4.2). Cauchy problemine ulaşılır. Picard teoremi gereği bu problemin çözümünün var ve tek olduğu bölge. D0i 1 {(t , z ) :| t ti 1 | hˆi , | z yi 1 | b}. dir. Adım genişliği hˆi seçilerek işlem yapılır. Adım genişlikleri bu şekilde seçilerek (2.1) Cauchy probleminin yaklaşık çözümü D bölgesi boyunca elde edilir. Böylece (2.1) Cauchy probleminin çözümünün analitik devamı sağlanmış olur (Şekil 4.1).. x. D0 N D01. D02. D0 … …. t0. t1 t2. ti. tN-1. tN. Şekil 4.1. Örnek 4.1. D = {( t, x ): | t 1 | 3, | x 1 | 3} bölgesi üzerinde. x(t ) x(t ) , x(1) =1. t.
(40) 32. Cauchy probleminin çözümü Picard teoremi tabanlı adım genişliği seçerek hesaplanmıştır. Hesaplamalarda kolaylık açısından Euler metodu kullanılmıştır. Problemin çözümü için aşağıdaki tablo elde edilmiştir.. i. hi. 0. ti. yi. 1. 1. 1. 0.75. 1.75. 1.75. 2. 0.631579. 2.38158. 2.85526. 3. 0.51236. 2.89394. 4.31818. 4. 0.409938. 3.30388. 6.53065. 5. 0.314774. 3.61865. 8.58633. 6. 0.258926. 3.87758. 10.8095. 7. 0.122424. 4. 13.1578. Tablo 4.1. Grafik 4.1. Tablo 4.1 den elde edilen spline fonksiyonunun grafiğinin şekli.
(41) 33. f(t, x) fonksiyonu sonsuz süreksizlik noktasına sahip değilse, nümerik hesaplamalar için Picard teoremi tabanlı adım genişliği seçimi yapılması uygundur. Fakat f(t,x) fonksiyonun sonsuz süreksizlik noktası varsa, adım genişliği seçiminde ilk adımdan sonra analitik çözüm yerine hesap edilen nümerik çözüm kullanıldığından,. problemin. çözümünün. olmadığı. bir. bölgede. çözüm. hesaplanabilmektedir. Bu ise, nümerik hesaplamalarda elde edilebilecek en kötü sonuçtur. Bu durumun daha iyi anlaşılması için aşağıdaki örneği inceleyelim.. i. hi. ti. yi. 1. 0.0757576. 0.0757576. 2.15152. 2. 0.0737965. 0.149554. 2.33435. 3. 0.0715299. 0.221084. 2.55715. 4. 0.0689062. 0.289999. 2.93152. 5. 0.065869. 0.355859. 3.19312. 6. 0.0623605. 0.41822. 3.30313. 7. 0.0583287. 0.476548. 4.15022. 8. 0.0537407. 0.530289. 4.85284. 9. 0.0486018. 0.578891. 5.76155. 10. 0.0429803. 0.621871. 6.94067. 11. 0.0370308. 0.658902. 8.46753. 12. 0.0309999. 0.689902. 10.4277. 13. 0.0251976. 0.715099. 12.9049. . . 53. 0. 0.81506. 314.887. Tablo 4.2. Örnek 4.2. D {(t , x) :| t | 5, | x 2 | 10} bölgesi üzerinde. x (t ) x x 2 , x(0) 2.
(42) 34. Cauchy problemini ele alalım. Basitlik için Euler metodunu kullanarak Picard teoremi tabanlı adım genişliği seçelim. Problemin çözümü Tablo 4.2 de verilmiştir. Tablo 4.2 de görüldüğü gibi bir {hn } (n=2,3,…,53) dizisi elde edilmiş ve [0,0.81506] aralığında verilen problemin çözümü yaklaşık olarak hesap edilmiştir. Verilen problemin gerçekte t ln 2 0.693 değeri için çözümü olmamasına rağmen nümerik metot ile t=0.81506 değerine kadar sanki çözüm varmış gibi işlem yapılmış ve çözümün tanımsız olduğu nokta (sonsuz süreksizlik noktası) atlanmıştır. Tablo 4.2 den elde edilen ikinci dereceden spline fonksiyonu aşağıda Grafik 4.2.i ve Grafik 4.2.ii de verilmiştir.. Grafik 4.2.i. [ t0 ,t12 ]=[0,0.689902] aralığında spline fonksiyonunun grafiğinin şekli.
(43) 35. Grafik 4.2.ii. Grafik 4.2.ii de ise Tablo 4.2 nin [0.658902,0.762225] aralığı için spline fonksiyonu verilmiştir. Burada [0.689902,0.715099] aralığında t ln 2 0.693 noktasında çözüm yoktur. Dolayısıyla işaret edilen noktadan itibaren çizilen grafik gerçekten verilen problemin çözümünü ifade etmez. Picard Teoremi tabanlı adım genişliği seçiminde yapılan tespitler: 1) Her bir adımda x(t i ) tam çözümü yerine. nümerik çözümle elde edilen y i. yaklaşık çözümü kullanıldığından, elde edilen yaklaşık çözüm problemin çözümüne yeterince yakın olmayabilir. 2) Çözümü sonsuz süreksizlik noktasına sahip olan problemlerde çözümün tanımsız olduğu noktayı da içine alan bir bölgede çözümün var ve tek olduğu görülebilir. Dolayısıyla, aslında çözümün var olmadığı bir noktada çözüm hesaplanabilir. Bu şekilde elde edilen sonuç ise yanlıştır..
(44) 36. 4.2. Hata Analizi Tabanlı Adım Genişliği Seçimi. (2.1). Cauchy. probleminin. çözümü. nümerik. metot. kullanılarak. hesaplanacağında, elde edilecek yaklaşık çözümün problemin tam çözümüne ne kadar yakın olacağı önemlidir. Bu ise, lokal ve global hata ile ölçülür. Dolayısıyla hata tahminine göre adım genişliği seçilerek yaklaşık çözümün tam çözümden fazla uzaklaşmaması sağlanabilir. Problemin çözümünün var ve tek olduğu bilinen bir bölgede, hata analizi tabanlı adım genişliği seçimi herhangi bir nümerik metot için verilebilir. Mesela bu kısımda, üçüncü bölümde hata analizleri incelenmiş olan Euler ve Runge- Kutta metotları için hata analizi tabanlı adım genişliği seçimi verilmiştir.. a) Lokal hataya göre adım genişliği seçimi. Lokal hata için Euler metodunda (3.7) üst sınırı elde edilmişti. Lokal hata verilen L sayısından küçük kalacak şekilde adım genişliği aşağıdaki şekilde seçilir.. 1 |LEi| max | z( ) | hi2 < L t i 1 t i 2. hi2 <. 2 L max | z ( ) |. [ ti 1 ,ti ]. 1. hi < (. 2 L ) 2 , ( i=1,2,…,N) max | z ( ) |. [ ti 1 ,ti ]. Runge- Kutta metodunda ise. (3.15) elde edilmişti. Euler metodundakine. benzer olarak adım genişliği. 1. hi < (. 12 L ) 3 , (i=1,2,…,N) 2 2 max | ( f tt 2 f . f tx f x . f t f . f x f f xx )( ) |. [ ti 1 ,ti ]. şeklinde seçilir..
(45) 37. b)Global hataya göre adım genişliği seçimi. Euler metodu için. max | x ( ) | M ti , |. ti 1 ti. hi2 f M ti (t , x) | M 0 0 , |LEi| 2 x. ifadelerini göz önüne alalım. Ayrıca. | GEi || GEi 1 | (1 hi M 0 ) | LE i |. (4.3). eşitsizliği verilmişti. Euler metodunda (4.3) eşitsizliği kullanılarak global hata verilen bir g sayısından daha küçük kalacak ve | LE1 | L1 olacak şekilde adım genişliği için ilk adımda. h1 (. 2 L1 M t1. ). 1 2. ve bundan sonraki adımlarda Li ,. i 1. i. g L j 1. (1 h M k. j. 0. ). k j 1. eşitsizliğini sağlayacak şekilde olmak üzere. g L. hi ( i 1. 1). i. i 1. (1 h M Lj. j 1. elde edilir. Runge- Kutta metodu için. k. k j 1. 0. ). 1 M0.
(46) 38. max | x ( ) | M ti , |. ti 1 ti. f (t , x) | M 0 ve | f (t , x) | M x. olmak üzere. 1 | GEi | (1 hi M 0 ) | GEi 1 | hi2 ( M ti M .M 0 ) | LE i | 2. eşitsizliğinden faydalanarak adım genişliği seçmek için aşağıdaki işlemler yapılır.. i 1 i 1 i 1 i 1 1 Ci = [ h 2j ( M t j MM 0 ) (1 hk M 0 ) L j (1 hk M 0 )] Li1 Li g j 1 2 j 1 k j 1 k j 1. olmak üzere Ci < 0 olacak şekilde Li seçilir. Buna göre. Ai =. 1 ( M ti MM 0 ) 2. i 1 i 1 i 1 i 1 1 Bi = M 0 [ h 2j ( M t j MM 0 ) (1 hk M 0 ) L j (1 hk M 0 )] j 1 2 j 1 k j 1 k j 1 i 1 i 1 i 1 1 2 Ci = [ h j ( M t j MM 0 ) (1 hk M 0 ) L j (1 hk M 0 )] Li1 Li g j 1 2 j 1 k j 1 k j 1 i 1. i Bi2 4 Ai Ci. olmak üzere hi. Bi i Bi i ,(i=1,2,…,N) hi 2 Ai 2 Ai. olacak şekildedir..
(47) 39. 4.3. Picard Teoremi ve Hata Analizi Tabanlı Adım Genişliği Seçimi. D ={( t, x ): | t t 0 | a , | x x0 | b } bölgesi üzerinde (2.1) Cauchy problemini. x f (t , x ) x(t 0 ) x0. ele alalım. f (t , x) fonksiyonu için Picard teoreminin şartlarının sağlandığını kabul edelim. (2.1) Cauchy probleminin çözümünün var ve tek olduğu bölge. D0 ={( t, x ):| t t 0 | hˆ , | x x0 | b}. olsun. [ti-1 , ti) aralığında (2.1) Cauchy probleminin çözümü z (t ) olmak üzere; kullanılan herhangi bir nümerik metodun ilk adımda. h1. adım genişliği,. max | f ( , ) | M olmak üzere Picard teoremindeki hˆ =min{a,b/M} parametresi. ( , )D. olarak seçilerek ( t1 , y1 ) noktası hesap edilir ve. D1 {(t , z ) :| t t1 | a, | z y1 | b01 }. bölgesi üzerinde (4.1) Cauchy problemi göz önüne alınır. Burada b01 değeri; kullanılan nümerik metodun lokal hata analizinin ilk adımında elde edilen. | z y1 | b1 sonucundaki değer b1 olmak üzere b01 min{b, b1 } dir. Picard teoremi gereği bu problemin çözümün var ve tek olduğu. D01 {(t , z ) :| t t1 | hˆ2 , | z y1 | b01 }. bölgesi elde edilir. h2 adım genişliği hˆ2 alınarak ( t 2 , y2 ) noktası hesaplanır. İşleme bu şekilde devam edilirse i inci adımda.
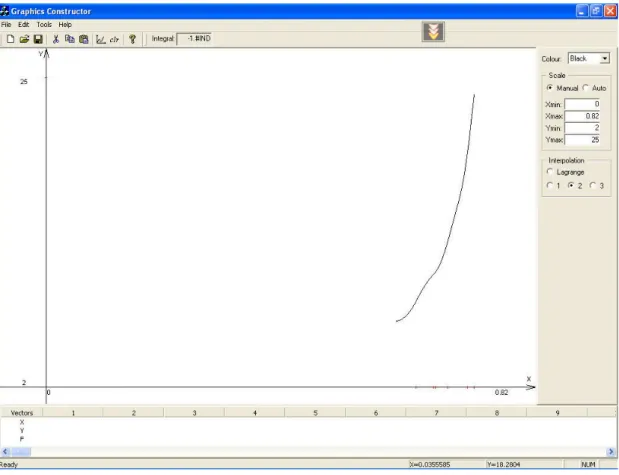
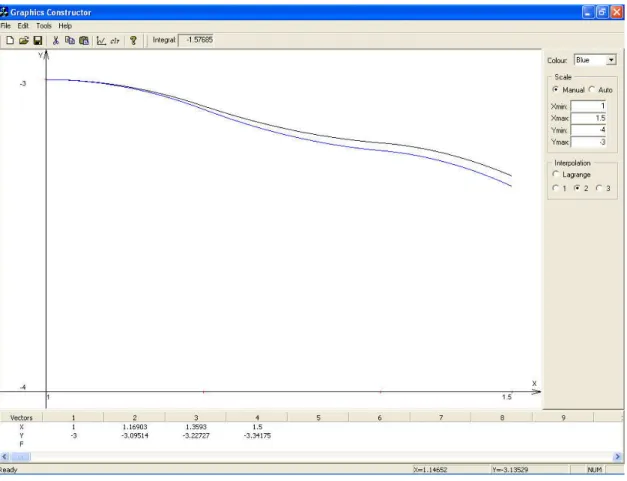
(48) 40. Di 1 {(t , z ) :| t ti 1 | a, | z yi 1 | b0i 1}. bölgesi üzerinde (4.2) Cauchy problemine ulaşılır. Burada b0i 1 değeri; kullanılan nümerik metodun lokal hata analizinin (i-1) inci adımında elde edilen | z yi 1 | bi 1 sonucundaki değer bi 1 olmak üzere b0i 1 min{b0i 2 , bi 1} dir. Picard teoremi gereği bu problemin çözümünün var ve tek olduğu bölge. D0i 1 {(t , z ) :| t ti 1 | hˆi , | z yi 1 | b0i 1}. dir ve adım genişliği hˆi seçilerek işlem yapılır. Adım genişlikleri bu şekilde seçilerek (2.1) Cauchy probleminin yaklaşık çözümü D bölgesi boyunca elde edilir.. Picard teoremi tabanlı adım genişliği seçimi ile ilgili yapılan tespitler kısım 4.1 de verilmişti. Bununla ilgili sakıncaların ortadan kaldırılması için Picard teoremi tabanlı adım genişliği fikri ile Hata analizi tabanlı adım genişliği fikri birleştirilmiş ve bu kısımda Picard teoremi ve hata analizi tabanlı adım genişliği seçimi verilmiştir. Şimdi, Örnek 4.2 de ele alınan problemin çözümünü Picard teoremi ve hata analizi tabanlı adım genişliği seçerek yeniden hesap edelim. Hesaplama için yine Euler metodunu kullanalım.. Örnek 4.3. D {(t , x) :| t | 5, | x 2 | 10} bölgesi üzerinde. x (t ) x x 2 , x(0) 2. Cauchy probleminin çözümünü Picard teoremi ve hata analizi tabanlı adım genişliği seçerek yeniden hesap edilmiş ve Tablo 4.3 te verilmiştir. Hesaplama için yine Euler metodunu kullanılmıştır..
(49) 41. i. hi. ti. yi. 1. 0.0757576. 0.0757576. 2.15152. 2. 0.0813039. 0.157062. 2.35295. 3. 0.0871048. 0.244166. 2.63024. 4. 0.092008. 0.336174. 3.02476. 5. 0.0926331. 0.428807. 3.592008. 6. 0.0811714. 0.509979. 4.34786. 7. 0.04966187. 0.559598. 5007012. 8. 0.0140228. 0.57362. 5.35949. 9. 0.000972842. 0.574593. 5.38222. 6. 0.574598. 5.38233. 0.574598. 5.38233. 10 11. 4.62105* 10 0. Tablo 4.3. Görüldüğü gibi [0,0.574598] aralığında yaklaşık çözüm hesaplanmıştır ve t ln 2 0.693 noktası geçilmemiştir.. Grafik 4.3.Tablo 4.3 den elde edilen ikinci dereceden spline fonksiyonunun grafiğinin şekli.
(50) 42. 4.4. Pratik Adım Genişliği Seçimi. (2.1) Cauchy probleminin yaklaşık çözümü için kısım 4.1, kısım 4.2. ve kısım 4.3. te verilen adım genişliği seçimleri ile teorik olarak D bölgesi boyunca çözüm elde edilebilir. Fakat pratikte bu mümkün olmayabilir. Cauchy problemlerinin çözümleri nümerik metotlarla hesaplanmak istendiği zaman bilgisayar sayıları dikkate alınmalıdır. Bilgisayar sayıları kümesinin en küçük elemanının var olduğu bilinmektedir (Godunov et al. 1993, Akın and Bulgak 1998, Aydın et al. 2003, Çıbıkdiken 2002). Bilgisayarla işlem yapılırken bu sayıdan daha küçük bir sayıyı bilgisayar “0” (sıfır) olarak görür. h* , kullanıcının belirlediği istenildiği kadar küçük bir parametre olmak üzere hn < h* olduğu zaman hesaplama işlemi sona erer. Burada. hn pratik adım genişliği parametresi olarak adlandırılır. Bulgak 2000 de interval matrisler için kullanılan pratiklik kavramı, burada Cauchy problemlerinin nümerik integrasyonunda adım genişliği için yeniden değerlendirilerek pratik adım genişliği parametresi tanımlanmıştır. Şimdi, adım genişliği kontrolünü aşağıda verelim.. 4.5. Adım genişliği kontrolü (K). k; adım sayısı, hˆk ; ele alınan adım genişliği seçiminde hesaplanan adım genişliği ve h * , pratik adım genişliği olmak üzere adım genişliği kontrolü aşağıdaki şekilde verilir. k 1. K:. 1.. h. i. hˆk a ise;. i 1. 1.1. hˆk h * ise hk hˆk alınır. 1.2. hˆ h* ise h =0 alınır ve işlem sona erer. k. k.
(51) 43. k 1. 2.. h hˆ i. i 1. k. k 1 ˆ a ise hˆk a hi alınır. i 1. ˆ ˆ 2.1. hˆk h * ise hk hˆk alınır. ˆ 2.2. hˆk h * ise hk =0 alınır ve işlem sona erer..
(52) 44. 5. ALGORİTMALAR. Bu bölümde,. dördüncü bölümde incelenen adım genişliği stratejileri. doğrultusunda D ={(t,x): | t t 0 | a, | x x0 | b} bölgesi üzerinde verilen (2.1) Cauchy problemi için adım genişliği ve yaklaşık çözümünü hesap eden algoritmalar verilmiştir. Hesaplamalarda dikkate alınan nümerik metot ne olursa olsun verilen algoritmalar kullanılabilir.. 5.1. Picard Teoremi Tabanlı Adım Genişliği İçin Algoritma. (2.1) Cauchy probleminin nümerik çözümü için Picard teoremi tabanlı adım genişliği seçen ve problemin yaklaşık çözümünü hesaplayan algoritmayı verelim. Bunun için t [t i 1 , t i ] aralığı için Picard teoreminde verilen max. [ti 1 a ,ti 1 a ] [ yi 1 b , yi 1 b ]. | f ( , ) | M i ,. hˆi = min(a,b/ M i ). ifadelerini göz önüne alalım. Algoritma aşağıdaki şekildedir.. 0. Adım (Giriş Elemanları): a, b ve h * sayıları girilir.. 1.Adım: M 1 sayısı hesaplanır. 1.1. hˆ1 sayısı hesaplanır. 1.2. K- kontrolü yapılır. 1.3. t1 = t 0 h1 ve y1 hesaplanır.. k. Adım: M k sayısı hesaplanır. k.1. hˆk sayısı hesaplanır. k.2. K- kontrolü yapılır..
(53) 45. k.3. t k = t k 1 hk ve y k hesaplanır.. Burada algoritmayı durduran adım K- kontrol adımıdır. Kontrol adımında, N. h. k. a veya hN h * olduğunda işlem durur.. k 1. 5.2. Hata Analizi Tabanlı Adım Genişliği İçin Algoritma. Dördüncü bölümde hata analizi tabanlı adım genişliği stratejisi örnek olarak Euler ve Runge Kutta metotları için verilmişti. Bu kısımda verilen algoritmanın da yine herhangi bir metot için verilebileceğini belirtmekle beraber örnek olarak Euler ve Runge-Kutta metotları için algoritma verelim. Bu algoritmalar her bir adımda hata analizine dayalı adım genişliği ve (2.1) Cauchy problemi için yaklaşık çözüm hesaplar.. a) Lokal hata analizi tabanlı adım genişliği için algoritma:. Euler Metodu için;. 1 max | z( ) | M ti olmak üzere algoritma aşağıdaki t i 1 t i 2. şekilde olur.. Algoritma 1:. 0. Adım (Giriş Elemanları): a, b, h * ve L sayıları girilir.. 1. Adım: M t1 hesaplanır. 1. 2 1.1. hˆ1 < ( L ) 2 olacak şekilde hˆ1 hesaplanır. M t1 1.2. K- kontrolü yapılır..
(54) 46. 1.3. t1 = t 0 h1 ve y1 = y 0 h1 f (t 0 , y 0 ) hesaplanır.. k. Adım: M t sayısı hesaplanır. k. 1. 2 k.1. hˆk < ( L ) 2 olacak şekilde hˆk sayısı hesaplanır. M tk. k.2. K- kontrolü yapılır k.3. t k = t k 1 hk ve y k = y k 1 hk f (t k 1 , y k 1 ) hesaplanır.. Runge- Kutta metodu için; max | ( f tt 2 f . f tx f x . f t f . f x2 f 2 f xx )( ) | M ti. [ ti 1 ,ti ]. olmak üzere algoritma aşağıdaki şekilde olur.. Algoritma 2:. 0. Adım (Giriş Elemanları): a, b, h * ve L sayıları girilir.. 1. Adım: M t1 hesaplanır. 1. 12 L 3 ) olacak şekilde hˆ1 hesaplanır. 1.1. hˆ1 < ( M t1 1.2. K- kontrolü yapılır. 1.3. t1 = t 0 h1 hesaplanır. 1 1.4. s1,1 f (t0 , y0 ) , s1, 2 f (t0 h1 , y0 s1,1h1 ) ve y1 y0 h1 ( s1,1 + s1, 2 ) hesaplanır. 2. k. Adım: M t sayısı hesaplanır. k. 1. 12 L 3 k.1. hˆk < ( ) olacak şekilde hˆk sayısı hesaplanır. M tk. k.2. K- kontrolü yapılır. k.3. t k = t k 1 hk hesaplanır..
(55) 47. 1 k.4. sk ,1 f (t k 1 , yk 1 ) , sk , 2 f (t k 1 hk , yk 1 sk ,1hk ) ve yk yk 1 hk ( sk ,1 + sk , 2 ) 2. hesaplanır.. b) Global hata analizi tabanlı adım genişliği için algoritma:. Euler metodu için. max | x ( ) | M ti , |. ti 1 ti. h2 f (t , x) | M 0 0 , |LEi| i M ti 2 x. olmak üzere global hataya dayalı algoritma aşağıdaki şekildedir.. Algoritma 1:. 0. Adım (Giriş Elemanları): a, b, h * , L1 ve g sayıları girilir.. 1. Adım: M t1 hesaplanır. 1. 2 1.1. hˆ1 < ( L ) 2 olacak şekilde hˆ1 hesaplanır. M t1 1.2. K- kontrolü yapılır. 1.3. t1 = t 0 h1 ve y1 = y 0 h1 f (t 0 , y 0 ) hesaplanır.. k. Adım: M t sayısı hesaplanır. k. k 1. k. k.1. g L j j 1. (1 h M i. 0. ) olacak şekilde Lk hesaplanır.. i j 1 1. 2 k.2. hˆk < ( L ) 2 olacak şekilde hˆk sayısı hesaplanır. M tk. k.3. K- kontrolü yapılır. k.4 t k = t k 1 hk ve y k = y k 1 hk f (t k 1 , y k 1 ) hesaplanır.. Runge- Kutta metodu için.
(56) 48. max | x( ) | M ti , |. ti 1 ti. f (t , x) | M 0 ve | f (t , x) | M x. olmak üzere global hataya dayalı algoritma aşağıdaki şekildedir.. Algoritma 2:. 0. Adım (Giriş Elemanları): a, b, h * ve g sayıları girilir.. k. Adım: M t1 hesaplanır. k 1 k 1 k 1 k 1 1 k.1. Ck = [ h 2j ( M t j MM 0 ) (1 hi M 0 ) L j (1 hi M 0 )] Lk 1 Lk g j 1 2 j 1 i j 1 i j 1. olmak üzere Ck < 0 olacak şekilde Lk hesaplanır. k.2. Ak =. 1 ( M tk MM 0 ) 2. k 1 k 1 k 1 k 1 1 Bk = M 0 [ h 2j ( M t j MM 0 ) (1 hi M 0 ) L j (1 hi M 0 )] j 1 2 j 1 i j 1 i j 1 k 1 k 1 k 1 k 1 1 Ck = [ h 2j ( M t j MM 0 ) (1 hi M 0 ) L j (1 hi M 0 )] Lk 1 Lk g j 1 2 j 1 i j 1 i j 1. k Bk2 4 Ak Ck sayıları hesaplanır.. k.3.. Bk k 2 Ak. Bk k ˆ hk olacak şekilde hesaplanır. hˆk 2 Ak. k.4. K- kontrolü yapılır. k.5. t k = t k 1 hk hesaplanır. 1 k.6. sk ,1 f (t k 1 , yk 1 ) ve sk , 2 f (t k 1 hk , yk 1 sk ,1hk ) ve yk yk 1 hk ( sk ,1 + sk , 2 ) 2. hesaplanır.. Global hata göz önüne alınarak adım genişliği seçildiği zaman tam çözüme oldukça yakın bir çözüm elde edilmesine rağmen verilen bölgenin tamamında.
(57) 49. yaklaşık çözüm elde edilemeyebilir. Seçilen Li ve hi lere bağlı olarak g kadar hata yapıldığı zaman işlem durur ve bir sonraki adıma geçilemez. Dolayısıyla Global hata taban alarak adım genişliği yapmak pratik değildir.. 5.3. Picard Teoremi ve Hata Analizi Tabanlı Adım Genişliği İçin Algoritma. (2.1) Cauchy probleminin nümerik çözümü için Picard teoremi ve hata analizi tabanlı adım genişliği seçen, problemin yaklaşık çözümünü ve her bir adımda oluşan lokal hatayı hesaplayan algoritmayı verelim. Bunun için t [t i 1 , t i ] aralığı için Picard teoreminde verilen max. [ti 1 a ,ti 1 a ] [ yi 1 b , yi 1 b ]. | f ( , ) | M i ,. hˆi = min(a,b/ M i ). ifadelerini göz önüne alalım. bi , kullanılan nümerik metodun lokal hata analizinin i inci adımında | z yi | üzerine elde edilen üst sınır olsun. Algoritma aşağıdaki şekildedir.. 0. Adım (Giriş Elemanları): a, b, h * ve L sayıları girilir.. 1.Adım: M 1 sayısı hesaplanır. 1.1. hˆ1 sayısı hesaplanır. 1.2. K- kontrolü yapılır. 1.3. t1 = t 0 h1 ve y1 hesaplanır.. 2. Adım: b01 =min{ b,b1 } sayısı hesaplanır. 2.1.. max. [ t k 1 a ,t k 1 a ] [ y k 1 b0 k 1 , y k 1 b0 k 1 ]. | f ( , ) | M 2 olacak şekilde M 2 sayısı hesaplanır.. 2.2. hˆ2 sayısı hesaplanır. 2.3. K - kontrolü yapılır..
(58) 50. 2.4. t 2 = t1 h2 ve y2 hesaplanır.. k. Adım: b0 k 1 =min{ b0 k 2 , bk 1 } sayısı hesaplanır. k.1.. max. [ t0 a ,t0 a ] [ y0 b01 , y0 b01 ]. | f ( , ) | M k olacak şekilde M k sayısı hesaplanır.. k.2. hˆk sayısı hesaplanır. k.3. K - kontrolü yapılır. k.4. t k = t k 1 hk ve yk hesaplanır..
Şekil
![Tablo 4.2 de görüldüğü gibi bir { h (n=2,3,…,53) dizisi elde edilmiş ve n } [0,0.81506] aralığında verilen problemin çözümü yaklaşık olarak hesap edilmiştir](https://thumb-eu.123doks.com/thumbv2/9libnet/4677906.87729/42.892.171.784.432.899/görüldüğü-edilmiş-aralığında-verilen-problemin-çözümü-yaklaşık-edilmiştir.webp)
+7



Outline
Benzer Belgeler
Araban is located in the north-east of Gaziantep, North of Besni, west of Pazarcik, the east of Halfeti and at the south of Yavuzeli district.. Başlıca Geçim Kaynağı/ : The
Sonntag, Sekizinci Baskıdan Çeviri, (Hüseyin Günerhan, çeviri editörü yardımcıları arasında yer almaktadır) , Palme Yayıncılık, 2018, Ankara.. “Principles of Engineering
AMAÇ: (a) Termal olmayan sönüm olayının etkisinin anlaşılması, (b) Güçlü termal olmayan sönüme uğrayan referans malzemenin çalışılması ve c) Etkinin tünelleme
AMAÇ: (a) TLD 100 için doz cevap eğrisinin oluşturulması, (b) Ölçümlerden önce tavlama prosedürüne aşina olunması (c) Bir önceki adımın doz cevap eğrisini
AMAÇ: (a) BeO dozimetre için OSL doz cevap eğrisinin oluşturulması ve (b) ilk adımda oluşturulan doz cevap eğrisi sayesinde başka (aynı) dozimetre
idarelerle merkezi idare arasında tanınmış olmakla birlikte, iki farklı tüzel kişi arasında kanunda düzenlenmiş olması şartıyla tüzel kişilerden bir diğerine göre
Mehmet'le çok eğlendik.Akşam olunca yemek yemek için otele geçtik.. Yemeğimizi yer yemez çok yorulduğum için ve uyku saatim geldiği için
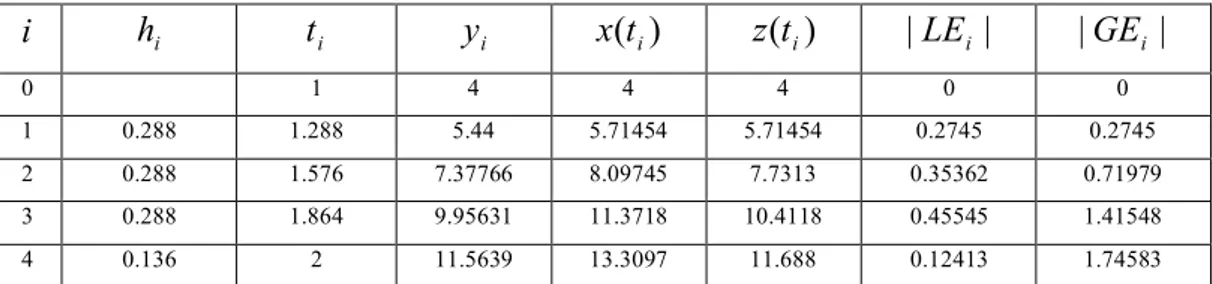
Bazı nümerik metotlar için hata açılımlarını dikkate alarak adım genişliği tespiti yapan farklı çalışmalar mevcuttur ([1,2,3]).Bu çalışmada, (1.1) in
