Experimental
Results and
Bifurcation
Analysis
on
Scaled
Feedback
Control for Subsonic
Cavity
Flows
X. Yuan, E.
Caraballo,
M.Debiasi,
J.Little,
A.Serrani*,
H.Ozbay
and
M.Samimy
Abstract-In this paper, we present the latest results of fromDepartmentsof Mechanical
Engineering
and Electrical ourongoing research activities in thedevelopmentof reduced- and Computer Engineering at OSU, Air Force Research order models based feedback control of subsoniccavityflows.Laboratory,
and NASAGlenn,
possesses synergistic capa-The model wasdevelopedusingtheProperOrthogonalDecom- ... . ' . 'position of Particle ImageVelocimetry images in conjunction
bilities
in all oftherequired
multdisciplinary
areas
of flow with the Galerkin projection of the Navier-Stokes equations simulation, reduced order modeling, controller design, and onto theresulting spatial eigenfunctions. Stochastic Estimationexperimental
integration
andimplementation
of the compo-method was used to obtainthe state estimation of the Galerkin nents along with actuators and sensors, . The ultimate goal system from real time surface pressure measurements. A istoenable theuseofclosed-loop aerodynamic
flow controllinear-quadratic optimal controller was designed to reduce to
enabl
theueof
osed-loopuaeronam
iclw cnt
cavity flow resonance and tested in the experiments. Real- to control theflow o n e vehicles and
timeimplementationshows asignificantreduction of the sound ultimately to control the motion of the vehicles themselves. pressure level withinthecavity,with a remarkable attenuation The initial
application
chosenas a benchmarkproblem
for of the resonant tone and a redistribution of the energy into study is closed-loop control of the acousticresonance of a various modes with lower energy levels. A mathematical flow over a shallow cavity[14], [15],
[18].
The objective of analysis of the performance of the LQ control, in agreement thecurrent
work istoprovide
acomprehensive
overview ofwith theexperimental results, is presented and discussed. the ctivit of
to
grou ndea feedbacko ntrolthe activity of the group on modeling and feedback control
I. INTRODUCTION design, including apresentationof thespecific experimental
setup andamathematical discussion of the results obtained
The generation of tones by flow past an open cavity ineprm tadsmuto.
is a well known phenomenon which affects landing gear The paper is organized as follows: the experimental and weapons bays on aircraft. This flow is characterized
apparau
isdescribed
in SonlIIs
Se
expediscusse
bya complex feedback process that leads to self-sustained
reduced-oderimodein
techn
ofcaity
flodics.
oscillations referred to as Rossiter [13] mechanism: small
rollerdes
rel teimpementation
danalis
disturbances are amplified by the
cavity
shearlayer,
andonthe
rear
teinpSection
Iolloedib
ndproduce acoustic waves when
they
impinge
on the down-concluding
remarks
in SectionV.
stream corner of the cavity; these acoustic waves then
propagate upstream and excite further instabilities in the II. EXPERIMENTAL APPARATUS
shear layer, leading to
self-forcing.
The sound pressure In this section we outline theexperimental
setup de-levels of thetones canbeashighas 160dB,whichcan cause scribed in more detail in Debiasi and Samimy [6]. The core structural damage in air vehicles. Whilepassive
and open- oftheexperimental
setupconsists ofanoptically accessible,
loop active controlmethodologieswere
extensively applied
blow-down type wind tunnel with a test section of width for the suppression of cavity flow tones in paststudies,
W= height H = 50.8 mm. A cavity that spans the entire feedback control has onlyrecently
beenemployed
to this width of the test section is recessed in the floor with aproblem (see Cattafesta et al. [2] for a recent
review)
and depth D = 12.7 mm and length L = 50.8 mm for an the effects of the closed-loopdynamic
control on the flow aspect ratioL/D
4. For control thecavity shear-layer
dynamics are not well understood yet. receptivity region is forced by a 2-D synthetic-jet type The flow controlteam atthe Ohio State
University
(OSU)
actuator issuing at 30 degrees relative to the main flow Collaborative Center of Control Science(CCCS)
isworking
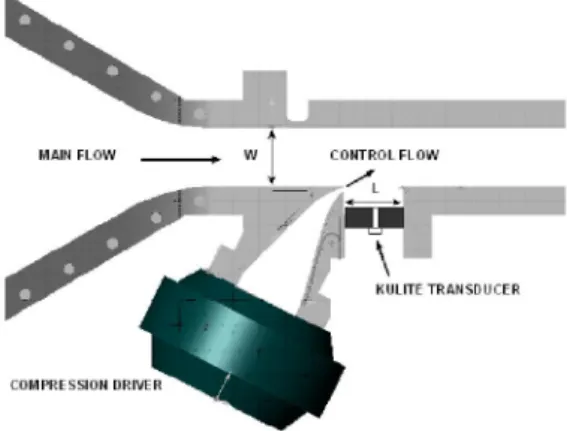
from a 1 mm slot embedded in the cavity leading edge andto develop tools and methodologies for closed-loop aero- spanning the width of the cavity, see Fig. 1. A Selenium dynamic flow control. The team, composed of researchers D3300Ti compression driver provides the mechanical
os-This work issupported in part by AFOSR and AFRL/VA through the ciltin neesr'ocet h zr e as ozr
Collaborative Center of Control Science (Contract F33615-01-2-3 154). net momentum flow for actuation. The actuator signals
X. Yuan and A. Serrani are with the Department of Electrical & are produced by either a BK Precision
3011lA
function ComputerEngineering, the Ohio State University, Columbus, OH, 43210 geraofropnlpfrcgorbadSAE10DPE. Caraballo, M. Debiasi, J. Little and M. Samimy are with Gas Dy- geeao fo opnlo ocn rb SAE10S
namics and Turbulence Laboratory, Mechanical Engineering Department, control board In closed-loop studies and are amplified by the Ohio State University, Columbus, OH 45235-7531. a Crown D-150A amplifier. The pressure fluctuations are H. Ozbay is with the Department of Electrical & Electronics Engineer- measured by Kulite dynamic pressure transducers placed
ing, Bilkent University, Ankara, TR-06533, Turkey; on leave from The indfentlciosnthtsteto.AdPCE10
OhioState University. 1 1frn oa1n ntets ehn SAE10
computer is used to simultaneously acquire the pressure explicit expression of the control effect inthe equations to signals at 50 kHz through 16-bit channels and manipulates facilitate the design of the feedback control law. Meanwhile them to produce the desired control signal from a 14- stochastic estimation is usedto estimate the states based on bit output channel. Each recording is band-pass filtered real time surface pressure measurements.
between 800 and 10,000 Hz to remove spurious frequency
components. The "snapshots" of the flow field, required for A. POD Method
The POD method was introduced to the fluid dynamics
community by Lumley [12] as a way to extract large-scale structures in a turbulent flow. The general idea is to
decompose
the flow field into a set oforthogonal spatial
basis that contains the most dominant characteristics of
:AINFLOW
1ONTROL
W FLOW the flow. More details of the fundamentals of this method can be found in Holmes et al.[10].
The PODapproach
under
investigation
is thesnapshot
method[16],
which isK
_ITE
TRANSDUCER more suitable forhighly spatially
resolved data sets that| 11 iw , ~~~~~~KULITETRANSDUiCER
can be obtained
using
numerical simulations or advanced laser-based flowdiagnostics. Applying
the POD method COMPRESSION DRIVE t _ _ results in atemporal-spatial decomposition
of a flowvariable (e.g. the streamwise velocity u(x, t)) as:
N
Fig. 1. Cutoutof the wind tunnelshowingtheconverging nozzle,thetest
u(x,
t)
E
ai(t)
oi(x),
(1)section, the cavity, the actuatorcoupling, and the placement of a Kulite transducer in thecavityfloor.
where i
(x)
are spatial modes that capture the coherent thedevelopment
of the low dimensionalmodel,
areacquired
structures and time coefficients ai(t)
are function of time andprocessed using
a LaVision Inc. PIVsystem.
Detailsonly
andrepresent
the time evolution of thecorresponding
> . . . .
~~~~~~~~~~~coherent
structures. ofthe PIV system, procedure, andresults are presented in[ 1]. The main flow is seeded with Di-Ethyl-Hexyl-Sebacat B Galerkin
Projection
(DEHS) particles by using a 4-jet atomizer upstream of the
stagnation chamber. A dual-head Spectra Physics PIV-400 The Galerkin projection method was used to acquire a Nd:YAG laser operating at the 2nd harmonic (532 nm) is low dimensional model of the cavity flow in the form of used inconjunctionwith sphericaland cylindrical lenses to a set of ODE's for the time coefficients a(t). The method form a thin(
1mm),
vertical sheetspanning the streamwise relies on the projection of the governing equations of the direction of the cavity at the middle of test section width.flow,
thecompressible
Navier-Stokes in this case, onto theTwo CCD cameras (2K by 2K) with maximum acquisition POD
spatial
basis derived by POD decomposition. Referfrequency of 15 Hz capture the images when the laser is to
[3], [15]
for a detaileddescription
of the derivation of fired. Dedicated software is used to process the images and this model. It's worth to notice that a standard Galerkin obtain the velocity flow field information. This setup gaveprojection
results in an ODE model with external controlavelocity vectorgridof 128by 128 overthe measurement effect
implicitly expressed
in themodel,
which is not useful domain of 50.8mmwhich translates to eachvelocity vector for controllerdesign.
In orderto derive amodel where thebeing separated by approximately 0.4 mm. In the initial control
input
appearsexplicitly
in the equations, a controlphase of the experiments only 2 velocity components are
separation
methodwasincorporated
into the Galerkinpro-obtained. jection
procedure.
The main idea of the control separationis to separate the sub-domain of space where the external
III. REDUCED-ORDER MODELING control input is introduced into the flow field from the rest
Reduced-order models of the flow werederived from PIV of the field, as detailed in Efe and Ozbay [8], [9], which snapshots and surface pressure measurements of the cavity yields a system in the following form:
flow as described in detail by the authors in previous works
[3], [4], [15]. The approach is based on the combination of
(aTH1a8
three independent tools. First, the POD method is used to a=F+ Ga + | B+| |), (2)
acquire a spatial basis of the velocity field. Then, Galerkin VaTHNa
V-projection method is applied to obtain the flow model in
the form of a set ofordinary differential equations for the where the matrices ofconstant coefficients F, G, Hi, B and POD temporal coefficients (states of the system model). In
if,
i =1, ,N, are obtained from the Galerkin projection, the process of projection, the domain of control input was and17(t)
is the control input applied at the forcing location, separated from the rest ofthe flow field which results in a detailed in Yuan et al. [19].C. Stochastic Estimation where
The Stochastic Estimation (SE) method has been used
(aT
(H1
+H1T)1T
here to estimate the time coefficient of the Galerkin system G=G +
,B=
B +aO.
(2) for feedback flow control. SE was originally proposed T H4
H4T)
4Tand used by Adrian [1] as a method to extract coherent 0
(
+H \structures from a turbulent flow field. The technique es- Clearly, the modified model has an equilibrium point atthe timates flow variables at any location by using statistical origin, which is more convenient for controller design and information about the flow at a limited number oflocations. stability analysis.
Inanyrealistic setting,the real-timeexperimentaldata could
only be obtained via surface measurements (e.g. surface B Linear Quadratic State Feedback Control
pressure or surface shear stress measurements). In the A linear
approximation
of(4)
at theorigin
isreadily
currentwork, quadratic stochastic estimationwasemployed obtained as
to estimate the time coefficients of the flow model (2) a =
Ga
+BF.
(5)
directly from real-time measurements of surface pressures The
eigenvalues
of thesystem
matrix G have been com-p(t)
at asmall number of locations L = 6. The estimates of puted for the three casesrespectively
and show the same the time coefficients can be written in the following form:qualitative
X features (2 unstable complex conjugateeigen-6,i(t) CikPk(t) +DiklPk(t)1(t), k~ 1~... 6 (3 values plus 2 stable real eigenvalues) and quantitative
&a
(t) CikPk(t) + Diklpk(t)pi(t), k,1 1,,..~
6 (3)similarities
as well. The presence of twounstable
complex where C D are the matrices of the estimation coefficientsconjugate eigenvalues implies,
asexpected,
that the meanobtainedby minimizing the averagemeansquareerror flow
(corresponding
to theequilibrium)
is an unstableobtained by minimizing the average mean square error souinfrteGeknsyem()
between the values ofai obtained from the
snapshots
and souto fo th Gaeri sytm(betweenthe
vstim
aludones
ofi
aobtaine
the snapshotsmand
Controllabilityof thepairs(G,
B) for all casesandavail-the esimte oe atesaeim.ability of real-time state estimates of the Galerkin model
renderedbystochastic estimation (3)allow theuseof linear
IV. FEEDBACK CONTROLANDANALYSIS state-feedback controller in this study. A standard
linear-quadratic (LQ) optimal controller based on the linearized Inthis section, wepresentthedesign of the model-based
model
(5) was designed in theform
controller, discuss the real-time implementation
results,
and interpret the results from a mathematical
perspective.
F=-Ka
(6)The design procedure includes equilibrium computation, and whereafter
applied
to the nonlinear Galerkin model. coordinatestransformation,linearapproximationand linear- Simulation results have shown that the LQ controllerde-quadratic state feedback control design, which is described
signed
for the linearapproximation (5)
succeeds in stabi-in[4], [19] inmoredetail. Three reduced-order flow models lizing the equilibrium of the four modes nonlinear Galerkin obtained by reduced-order modeling techniques discussed system (2), as indicated in Fig. 2.in Section III have been investigated in this work: (i) the
baseline Mach0.3flow; (ii)the baseline
flowforced
at3920 C. Real-Time ControlImplementation
Hzusingopen-loopsinusoidal excitation;
(iii) aflow
model In this part, we summarize the results obtained in the obtainedfrom POD modes derived by concatenating PIV realtime experimental implementation of the LQ feedback datasetsfrom
the two cases i and ii in time. The reduced- controller. It is important to point out that, to prevent order flow model for all the cases for controldesign
is the damaging the actuator, the control input signal is limitedsamenonlinearstate spacemodelgiven
by (2),
with N= 4, to the range±10V.
Since the LQ control by design is to whereas the numerical values of the model parameters completely eliminate the pressurefluctuations which resultsobviously varies for each flow condition. in quite large control gains, a constant saturation of the
actuator was observed during
closed-loop
experiments.
InA. Equilibrium Analysis and Model
Simplification
order to keep the actuator below the saturation limits, a constant scaling factorag
> 0 was introduced into the Defining a -a-a
as the new set of coordinates, where feedback loop. The largest feasible scaling factor has beena0
is the equilibrium point computed for the model (2), found for all three flow models respectively as: and shifting the origin of the coordinates to the equilibriumpoint corresponding to the mean flow gives a simplified
aE1
=0.265,
ag2
=0.35,
ag3
=0.5,
(7)state space model in the new set of coordinates as and the actual control law was scaled by
ag
as: a =Ga+. + Br + . r (4) The scaled LQ controls (8) have also been simulated on
-02X______________________--_a 0.02 tpjp 0.4 a2~~~~~~~~~ 0.01 0.6 a ~~~~~~~~~~~~~~~~~~~~~~~~~~~0.01 0.4 -0.03 0 it P. 0.002) 0.004 0.006 0.008 0.01 -0.4 ~~~~~~~~~~-( a20.140 05"=0.002 0004 0 006 0 008 0 01 0 012 a4 0.12~~~~~~~~~~~a0.6
whr
(tepant
is. tae 0to0 0be:0(a)baselin flwmdl()cmie dfeetsalnatr(a) baselin flo 0odel0(b)combine baselin and001 04 ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~0.16 - - - ~~~~~~~~~~~~a20.082 0.6 a~~~~~~~~~~~~~~~~200 0t~~~~~~~~~~~~~~, ~~ ~ ~ ~ ~ a30.04 0.4 ~~~~~~~~~~~~~~~~~~~~~~~~~~~~0.02 -0.02 -0.04 _0. 002 0.00 .0 .0 .102 0.0-.0 .0 008 00 .1baseline and open-loop forced flow model (forcing frequency 3920Hz). open-loop forced flow model (forcing frequency 3920Hz).
It is evident that, though the scaled LQ control for the Recall that G in (4) has 2 unstable complex conjugate given values of
ag
is not able to asymptotically stabilize the eigenvalues and 2 stable realeigenvalues._Let
T C2~4x4
origin of the nonlinear model (2), it nevertheless provides be a nonsingular transformation that puts G in modal form a significant reduction of the amplitude of the stable limit
cycle in all three cases. This result is in agreement with TGT-1 (1L 0 %
a mathematical analysis carried on the nonlinear finite- L2
dimensional Galerkin model (4) given in Section IV-D. L1=(5 W), L2 = (-Ai
The performance of the scaled control law (8) has been
\W
'JU/
-2tested experimentally, for different flow conditions. Here- where
uJ
> 0,w<
> 0, A1 > 0, and A2 > 0. Partitioning after, we present the results obtained for Mach 0.3 cavity the state vector according to the above decomposition, the flow. Specifically, we present the closed-loop sound pressure Galerkin system is written in the new coordinates as level (SPL [dB]) recorded by the sensor located at centralcavity floor with each scaled LQ controller designed on 1 = Lir1 + M1]7 +&bi(ry, ()+ 71(r1,
()F
the basis of the three flow models discussed above. The = L24+
M2F
+b2(ij,
() +'72(17,
()F
results for closed-loop scaled LQ control, shown in Fig.
4,
hrshow a considerable attenuation of the resonance peak, and wee T -t8 T 1/1
a redistribution of the energy into various modes, especially a<y,t2
lower frequency modes, with much lower energy level. The
scaled LQ state feedback control has also been shown to
zi(rj,
() =O(lr2,
ll2),
successfully reduce the dominant Rossiter peak and provide t(1 )=°|71, ll, i=1,2
good robustness when applied to off-design flowconditions 7J7 O( , 1,2
around Mach 0.3. Note that the control law F =-aKa can be expressed in
the new coordinates as
D. Mathematical Analysis of the Performance of LQ Con-F K1 K Q
trol
r=a1r-vX
In what follows, we present a simple analysis, carried out for some matrices K1 and K2. Since it has been verified that on the basis of the nonlinear Galerkin model, toexplain the the control input does not affect the location of the stable closed-loop results obtained with the LQ feedback control. eigenvalues of the open-loop matrix G, as it is typically
140 Baseline since >>»
(7,
and a e [0,1]. Letting ,= 1- 2a, one 13s 1336dB (aseline) obtains (modulo a unitary transformation)130
125
L,-
oV1Kl
(ao
-w)
'120-\W 11-1
116.7dB
115 and thus the spectrum of the closed-loop matrix
0- 110
105 (
L,
+(Ii/2
-1/2)M1Kl
0\100o
Lqt) ( (/,2-1/2)M2K2
L2)90
splits into a pair ofpurely imaginaryeigenvalues
and a85 pair ofnegative realeigenvalues when ,u=
0.
This implies(a)
103 104 the existence ofa center manifold for the trajectories of140 - Bsi the Galerkin system.
Specifically,
denote for the sake of135 133.6dB - LQ(3920) simplicity
130-125
-L
(h)
=LJ1
120 L21(,u) L21'
116.3dB
m 115
i(r7,qt)
= (T71, )-ay(T ()Krl
7i=1,2
1110
105 and write the
closed-loop
Galerkin system as100 95-90 rj
Lii(fi)T
+i1(T,(,11 )
() 853 4 L21(11)T+L2( -+ 2(T1,(:P)(b)
io3 where 140135 - ned) |bi(r, i) O( for all ,u, 1,i2
130 and we have added a trivial dynamics for the bifurcation
125 parameter
,u.
The CenterManifold
Theorem [5]establishes
120 114dB the existence of an exponentially attracting submanifold
110 of the state space, which is described
by
thegraph
of105
a smoothmapping
= 7(rj, u) satisfying 7(0, )
= 0,100r
(0
w/ )(,
q =)0,
and95 -07
853
4L=1((,)Tj
+q257(Tw,
wP)
+2(TI)]
(TI, P), P)(c) 103 frequency (Hz) 10+
for all
(rj,
,u)
in a neighborhood of(0,
0).
This allows toFig. 4. Soundpressure level inclosed-loopexperimentswithLQ design reduce the analysis of the dynamics of the Galerkin system
basedonbaseline flow model (a), forced flow model (b), and combined toits restrictionontothe centermanifold, which in thegiven
flow model(c).
setof coordinates reads as
012
_ A O-A01
+T/
K12
(,
7(q, P),
P)A
the case for
LQ-based
design,
necessarily K2
=[O
0]. - (i )-(s)
+¢2ij,7F(1,/l),L))
Therefore,theclosed-loop systemcanbe written in the form A
near-identity
transformation intoPoincare
normal form [17] yields=(Li aMiKitj + bi(r, - a'y1(r)K1rj q5ii(r1,w(r1,,u),,u) (-a(,u)rji-b(,u)rj2)p2 °O 5)
-aM2Kij +2&~ <'2(7, ~)- a'2(rj,~)K1r.
4b2(ij,
w(ri7,
,'),
8)
=(b(,u)rj
-a(1)172)p2
+O(l iil
5),
An easy computation shows that the eigenvalues of
the2
matrix L1
-aM1IK1
are given by nates one obtainswherepo
= /+the systemanda(Li)
>0.
Using
polarcoordi-A(L1 -
aMiKi) =(1
-2a)o-
+jw/>2
+4o-J2
(1 -a),
p uo-p-aQi)
p3 + 0(p5)and thus
where 0
=tan-1
(r12
/r11)).
Thestructure ofthe reducedexponentially stable equilibrium at the origin for ,u < 0, and Chris Camphouse, John Casey andKihwanKim and Cosku undergoes a Hopf-Poincare-Andropov bifurcation at ,u = 0, Kasnakoglu for fruitful and insightful discussions.
with a stable limit cycle for ,u > 0. The amplitude and
frequency of the limit cycle are given respectively by REFERENCES
[1] R. J. Adrian, "On the Role of Conditional Averages in Turbulent w_ /125*- +
b(t)AP/
Theory,"Turbulence inLiquids,SciencePress, Princeton, 1979.a(
) - a(,u) [2] L. N. Cattafesta, D. R. Williams, C.W. Rowley and F. S. Alvi,"Review of Active Control ofFlow-Induced Cavity Resonance",
from which, since a(,u) 0(1), it is readily seen that AIAAPaper 2003-3567, June2003.
the amplitude of the oscillation decreases as , 0+. [3] E. Caraballo, J.SubsonicCavity Flows - Low Dimensional Modeling," AIAA PaperMalone, M. Samimy, and J. DeBonis, "A Study of Recalling that ,u = (1 - 2a), the results of the analysis 2004-2124, June 2004.
can be summarized as follows: [4] E. Caraballo, X. Yuan, J. Little, M. Debiasi, P. Yan, A. Serrani,
J.MyattandM. Samimy,"Feedback Control ofCavityFlowUsing
1) If it iS required to seta < 0.5 to avoid saturating the ExperimentalBased Reduced Order Model," AIAA Paper 2005-5269,
actuator, theorigin of the Galerkin system can not be June2005.
stabilizedat all. [5] J. Carr,1981. Applications of Centre
Manifold
Theory, Springer-Verlag,2) If this is the case, the application of linear feedback [6] M. Debiasi and M. Samimy, "Logic-Based Active Control of
Sub-can still lower the amplitude of the limit cycle, but sonic Cavity-Flow Resonance",AIAAJournal, Vol. 42, No. 9, pp.
only up to the critical value imposed by the actuator [7] J.1901-1909, September 2004.Delville,L.Cordierand J. P. Bonnet, "Large-Scale-Structure
Iden-limits. tification and Control in Turbulent Shear Flows," In Flow Control:
The experimental results seem to support the results of theanalysis,aslinear Fundamentals and Practice, (M. Gad-el-Hak, A. Pollard and J.
feedback is capableto attenuatethereso-
[8Bonnet),
pp. 199-273, Springer-Verlag, 1998.analysis, as l1near feeback 1S cpable to ttenuate he reso- 8] M. 0. Efe and H. Ozbay, "Proper Orthogonal Decomposition for
nance inthe cavity to a certain extent, while complete sup- Reduced Order Modeling: 2D Heat Flow," Proc. of IEEEInt.Conf. pression seems to beunattainable with the given actuation. onControlApplications (CCA'2003), June 23-25, Istanbul, Turkey,
However, t maystil be posible to rduce the mplitude 2003a.
However, it may still be possible to reduce the amplitude [9] M.0.EfeandH.Ozbay, "Integral Action Based DirichletBoundary
of the cavity tone beyond the limit achievable using linear Control of Burgers' Equation," Proc. of IEEE Int. Conf. onControl
feedback, resorting to different control strategies (nonlinear Applications(CCA'2003),June 23-25, Istanbul, Turkey, 2003b. feedback ortime-varying feedback). In particular, a viable [10] P. Holmes, J. L. Lumley and G. Berkooz, Turbulence, Coherent
Structures, Dynamical System, and Symmetry, Cambridge University
strategy tobe pursed is to increasea(,u), shaping the center Press,Cambridge, 1996.
manifold = 7(rj, ,u) bymeans of nonlinear feedback. [11] J. Little, M. Debiasi and M. Samimy,"Flow Structure inControlled and Baseline Subsonic Cavity Flows", AIAA Paper 2006-0480, V. CONCLUSIONS AND FUTUREWORKS [12] January 2006.J. Lumley, "The Structure of Inhomogeneous Turbulent Flows", The work presented anddiscussed ispartofour ongoing AtmosphericTurbulence andWavePropagation, Nauka,Moscow,pp.
research activities in the development of reduced-order [13] J. E.166-176, 1967.Rossiter, "Wind Tunnel Experiments on the Flow Over Rect-models based feedback control of subsonic cavity flows. angular Cavities at Subsonic and Transonic Speeds", RAE Tech.
PIV data and the POD technique are used to extract the Rep. 64037, 1964and Aeronautical Research Council Reports and most energetic flow features. The Galerkin projection of [14] Memoranda No. 3438, October 1964.M.Samimy,M.Debiasi,E.Caraballo,H.Ozbay,M.0.Efe, X. Yuan, the Navier-Stokes equations onto the POD modes was J. DeBonis, and J. H. Myatt,"Development of Closed-Loop Control used to derive a set of ordinary differential equations, forCavity Flows", AIAAPaper 2003-4258,June2003b.
which govern the time evolution of the modes, and to [15] M. Samimy, M. Debiasi, E. Caraballo, J. Malone, J. Little, H. Ozbay,M. 0. Efe, P. Yan, X. Yuan, J. DeBonis, J. H. Myatt and R. C. use for the controllerdesign. Stochastic estimation is used Camphouse, "Exploring Strategies for Closed-Loop Cavity Flow to estimate the state of the Galerkin system from real- Control",AIAAPaper 2004-0576, January2004.
time pressure measurements. A linear-quadratic optimal [16] L. Sirovich,Quarterlyof"TurbulenceApplied Math,and theVol.XLV,Dynamics of CoherentN.3,pp. 561-590,Structures",1987.
controller was designed and implemented to reduce cavity [17]
S.
Wiggins, Introduction to Applied Nonlinear Dynamical Systems flow resonance. A mathematical analysis was performed andChaos, Springer,2003.to explain the closed-loop results obtained with the LQ [18] P. Yan, M.J. M.Myatt,Debiasi, X. Yuan, E.andM. Samimy, "Modeling and FeedbackCaraballo, A. Serrani,Control forH. Ozbay, feedback control. Notwithstanding the encouraging results Subsonic Cavity Flows: A Collaborative Approach", Proc. 44thIEEE
reported and discussed in this work, further investigation is CDC-ECC, Seville, Spain, 2005.
needed to understand how to incorporate more effectively [19] x. Yuan, E.J. H. Myattand M.Caraballo,Samimy,P. Yan, H. Ozbay, A. Serrani,J. DeBonis,"Reduced-order Model-based Feedback the presence of actuation inreduced-order POD models, and Controller Design for Subsonic Cavity Flows", AIAA Paper 2005-to pursue different control strategies (nonlinear feedback 0293, January, 2005.
Or time-varying feedback) to overcome the limit posed by linear feedback control.
VI. ACKNOWLEDGMENTS
The support of AFRL/VA and AFOSR under Contract