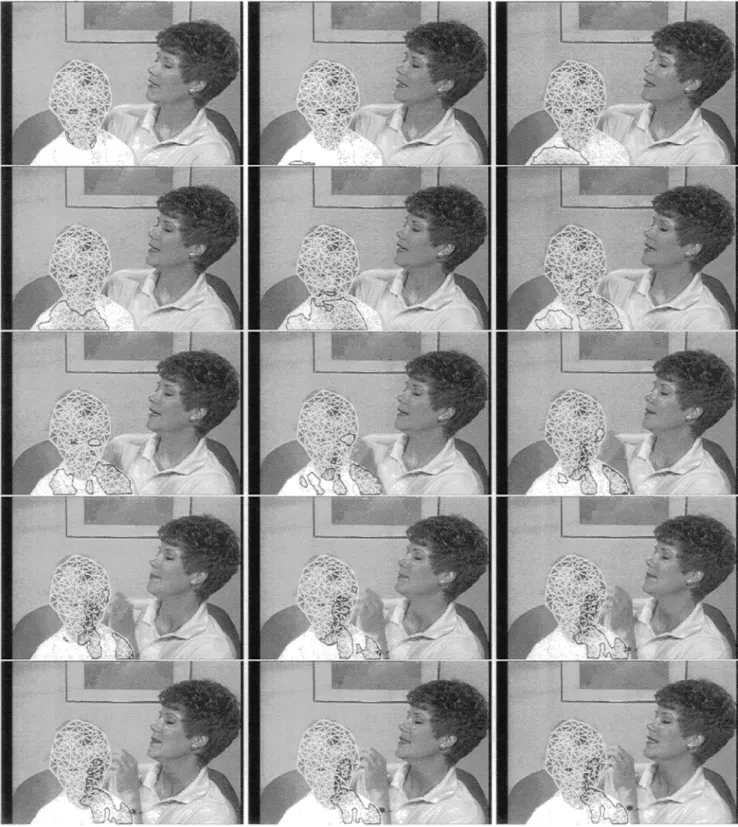
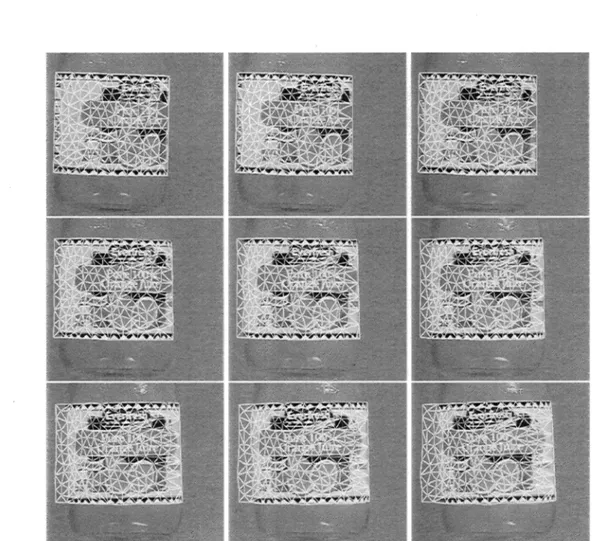
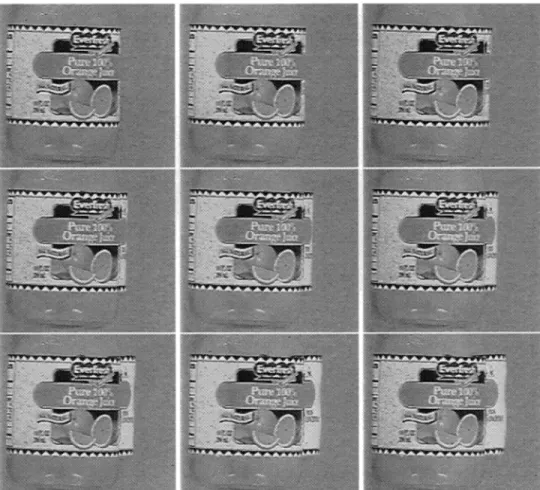
2-D triangular mesh-based mosaicking for object tracking in the presence of occlusion
Tam metin
Şekil
Benzer Belgeler
Kronik ruhsal hastalığı olan bireylere bakımverenlerin yükünü belirlemeye yönelik ülkemizde yapılan çalışmaların sistematik incelenmesi sonucunda, incelenen araştırmaların
Standard x-space suffers from a pile-up artifact in image intensity due to non-ideal signal conditions, whereas Lumped-PCI provides improved image quality with similar but less
This paper describes a system called prediction of protein subcellular localization (P2SL) that predicts the subcellular localization of proteins in eukaryotic organisms based on
In the next section we look at the value-added of each Science high school by estimating the effect or the value added of the high school on their students' performance on the
Overall, it can be said that level of representation can be improved and internal representations regarding the relational patterns can be change in a psychotherapy by
dığı gazel bir Divana muadildir; Pa şa olan şairler içinde, keza her mıs raı, bir vecize, bir daılbımesel kudre tinde olan meşhur Ziya Paşa, isminin
TÜİK veri setlerinde göre 2017 yılında Türkiye’de aktif nüfusun %47,1’i istihdam içerisinde yer almakta ve istihdamdakilerin %34’ü herhangi bir Sosyal
Rawley, Bacon’ın düşünsel altyapısının ve amacının “doğayı yorumlamak üzere kurulan bir düzen model olarak göstermek, ayrıca bu kurgusal düzenin yarattığı
