GPS VE LAZER DESTEKLİ BİR CBS VERİ TOPLAMA SİSTEMİNİN
YERSEL FOTOGRAMETRİ İLE BÜTÜNLEŞTİRİLMESİ
Mustafa CANIBERK YÜKSEK LİSANS TEZİ
JEODEZİ VE FOTOGRAMETRİ MÜHENDİSLİĞİ ANA BİLİM DALI
T.C
SELÇUK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
GPS VE LAZER DESTEKLİ BİR CBS VERİ TOPLAMA SİSTEMİNİN
YERSEL FOTOGRAMETRİ İLE BÜTÜNLEŞTİRİLMESİ
Mustafa CANIBERK YÜKSEK LİSANS TEZİ
JEODEZİ VE FOTOGRAMETRİ MÜHENDİSLİĞİ ANA BİLİM DALI
Bu tez 25.01.2008 tarihinde aşağıdaki jüri tarafında oybirliği / oyçokluğu ile kabul edilmiştir.
Yrd.Doç.Dr.Özşen ÇORUMLUOĞLU Prof.Dr.Cevat İNAL Yrd.Doç.Dr.S.Savaş DURDURAN (Danışman) (Üye) (Üye)
CBS Coğrafi Bilgi Sistemi
CCD Couple Charged Device
CMY Cyan, Magenta, Yellow
DEM Digital Elevation Model
DGPS Diferansiyel GPS
EGNOS The European Geostationary Navigation Overlay System GIS Geographic Information System
GPRS General Packet Radio System GPS Global Positioning System IrDA Infrared Data Association
KOH Karesel Ortalama Hata
LBS Location Based Sersices
MMS Multimedia Messaging Services
NMEA National Marine Electronic Assosiation
OH Ortalama Hata
PDA Personal Digital Assistant
PIM Personal Information Managemen
RGB Red, Green, Blue
SA Selective Availability
SAM Sayısal Arazi Modeli
SVA Streaming Video Application SYM Sayısal Yükseklik Modeli TIN Triangulated Irregular Network WAAS Wide Area Augmentation System
WAN Wide Area Network
WEP Wired Equivalent Privacy WLAN Wireless Local Area Network
WML Wireless Markup Language
WWAN Wireless Wide Area Network
XHTML Extensible HyperText Markup Language
ŞEKİL LİSTESİ
Sayfa
Şekil 2.1 Taşınabilir İşleme ve Depolama Araçları 4
Şekil 2.2 Arcpad Yazılımının Ekran Görüntüleri 6
Şekil 2.3 ArcPad Studio Yazılımının Ekran Görüntüsü 8
Şekil 2.4 Mobil CBS Sistemlerinde Kullanılan Donanımlar 9
Şekil 2.5 Lazer Mesafe Ölçer 12
Şekil 2.6 Elektronik Pusula 12
Şekil 2.7 Aynı Zamanda Bir Cep Bilgisayarı Olarak da Kullanılan El Tipi GPS Alıcısı (Trimble Recon)
16
Şekil 3.1 Sayısal Veri Toplama Sistemi 17
Şekil 3.2 Avuç İçi Bilgisayar 18
Şekil 3.3 Veri Toplama Yazılımı (ArcPad) 19
Şekil 3.4 El Tipi GPS Alıcısı 21
Şekil 3.5 Lazer Mesafe Ölçer 24
Şekil 3.6 Lazer Mesafe Ölçerin Ölçü Ekranı 24
Şekil 3.7 Elektronik Pusula 25
Şekil 3.8 GPS Sinyallerini Bozan Detayların Ölçülmesi 27
Şekil 3.9 Engelsiz Alandan Engelli Alandaki Detayların Ölçülme 27
Şekil 4.1 Fotogrametrinin Gelişim Evreleri. 30
Şekil 4.2 Dijital Fotogrametrik Sistemde Görevler 32
Şekil 4.3 Digital Fotogrametride Veri Akışı 33
Şekil 4.4 Dijital Fotogrametride Veri İşlenmesi 35
Şekil 4.5 Digital Fotogrametrik Görüntü 36
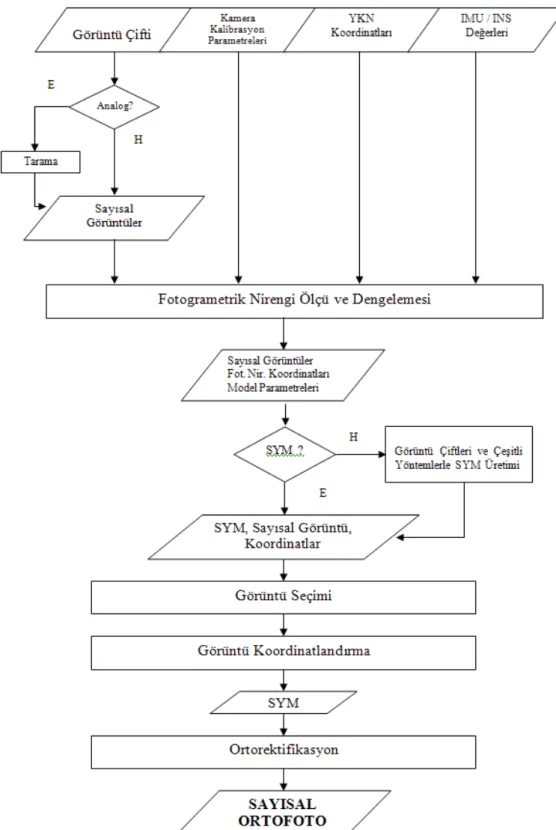
Şekil 4.6 Fotogrametrik Yöntemlerle Ortofoto Üretimi İş Akış Şeması 47 Şekil 4.7 Yersel Fotogrametrik Resim Çekme Makinelerinin Sınıflandırması 50
Şekil 4.8 Çeşitli Dijital Kameralar 57
Şekil 4.9 SGM-C21900 Sigma SD9 Profesyonel Dijital Fotoğraf Makinesi 57 Şekil 4.10 SGM-C22900 Sigma SD10 Profesyonel Dijital Fotoğraf Makinesi 57 Şekil 4.11 Kodak DCS Pro SLR/c Dijital Fotoğraf Makinesi 57 Şekil 4.12 Kodak DCS Pro SLR/n Dijital Fotoğraf Makinesi 57
Şekil 5.1 Kodak P712 Dijital Kamerası 58
Şekil 5.3 Erdas Imagine Yazılımı Görüntüsü ve Örnek Bir Çalışma 61
Şekil 5.4 PhotoModeller Yazılımı Ekran Görüntüsü 62
Şekil 6.1 Uygulama Bölgeleri 63
Şekil 6.2 Photomodeller Yazılımı İle Kamera Kalibrasyonu 65
Şekil 6.3 Kalibrasyon Değerlerinin Bulunması 65
Şekil 6.4 Kontrol Noktalarının Girilmesi 67
Şekil 6.5 Gps Kontrol Noktaları İle Oluşturulan Ortho Görüntü 68 Şekil 6.6 Lazer İle Ölçülen Kontrol Noktalarının Girilmesi 69 Şekil 6.7 Softplotter Yazılımına Ortho Görüntünün İmport Edilmesi 71
Şekil 6.8 Import Edilen Görüntünün Bilgileri 71
Şekil 6.9 Kıymetlendirme İşlemleri 72
Şekil 6.10 KDMS – DGN Dönüşümü 73
Şekil 6.11 Kontrol Noktalarının Girilmesi 77
Şekil 6.12 SoftPlotter Yazılımı İle Kıymetlendirme İşlemi 78
Şekil 6.13 Dgn Olarak Dönüştürülen Kıymetlendirme Verisinin Microstation Yazılımında Grafik Gösterimi
79
Şekil 6.14 Farklı Kaynaklardan Elde Edilen Verilerin Grafik Olarak Karşılaştırılması 79
Şekil 6.15 Renkli Görüntüden Yapılan Kıymetlendirme 80
Şekil 6.16 Uygulama Resim Çifti 83
Şekil 6.17 Ortak Noktaların İşaretlenmesi 83
Şekil 6.18 Otomatik SYM Çıkarılması İşlemi 85
Şekil 6.19 SYM üzerindeki kontrol noktalarının dağılımı 85
Şekil 6.20 Üretilen SYM’ nin Raster Görüntüsü 86
Şekil 6.21 Resim Çiftinde Ortak Noktaların İşaretlenmesi 91
Şekil 6.22 Shutter Gözlük İle Görülebilen Stereo Görüntü 91 Şekil 6.23 Dört Farklı Noktadan Çekilen Uygulama Resimleri 93
Şekil 6.24 Dört Resim İle Yapılan Blok Ve Dengelemesi 94
Sayfa
Tablo 1.1 Çeşitli Mobil CBS uygulamalar 15
Tablo 3.1 Avuç içi bilgisayar özellikleri 18
Tablo 3.2 GPS alıcısının konum ve hız belirleme doğrulukları 20 Tablo 3.3 GPS alıcısında aranan minimum teknik özellikler 20
Tablo 3.4 Lazer açı ve mesafe ölçer teknik özellikleri 22
Tablo 3.5 Lazer mesafe ölçerin ölçme seçenekleri 22
Tablo 3.6 Lazer mesafe ölçerin ölçme özellikleri 23
Tablo 3.7 Lazer mesafe ölçerin ayarları 23
Tablo 3.8 Elektronik pusulanın özellikleri 26
Tablo 6.1 Gps İle Ölçülen Kontrol Noktaları 68
Tablo 6.2 Lazer İle Ölçülen Kontrol Noktaları 69
Tablo 6.3 Modelden Yapılan Kıymetlendirme İle Bulunan Koordinatlar 74 Tablo 6.4 Gps Kontrol Noktaları İle Yapılan Ortho Görüntüden Elde Edilen Detay
Koordinatlarının Hataları
75
Tablo 6.5 Lazer Kontrol Noktaları İle Yapılan Ortho Görüntüden Elde Edilen Detay Koordinatlarının Hataları
76
Tablo 6.6 Lazer kontrol noktaları ile yapılan renkli ortho görüntüden elde edilen detay koordinatları
81
Tablo 6.7 Ortak Noktaların Koordinatları 84
Tablo 6.8 Fotogrametrik Olarak Kıymetlendirilen Detay Koordinatları 87 Tablo 6.9 Uygulama Sonucu Elde Edilen Detay Koordinatları 89
Tablo 6.10 Uygulama Sonucu Elde Edilen Detay Koordinatları 92 Tablo 6.11 Hava Fotoğrafından Kıymetlendirme Sonucunda Elde Edilen Koordinatlar 95
Tablo 6.12 Yersel Dijital Fotogrametrik Yöntemlerle Elde Edilen Koordinatlar Ve Hata Değerleri
GPS ve Lazer Destekli Bir CBS Veri Toplama Sisteminin Yersel Fotogrametri ile Bütünleştirilmesi konulu bu çalışmada, tez danışmanlığımı üstlenen ve çalışmanın her aşamasında bana destek olan, sabır gösteren sayın hocam Yrd.Doç.Dr. Özşen ÇORUMLUOĞLU’ na ve çalışmamda kullandığım sistemlerinin bulunduğu Harita Genel Komutanlığı’ na teşekkür ederim.
Çalışmalarım senasında desteklerini hiçbir zaman esirgemeyen eşime ve aileme teşekkürlerimi bir borç bilirim.
KISALTMA LİSTESİ i ŞEKİL LİSTESİ ii ÇİZELGE LİSTESİ iv ÖNSÖZ v ÖZET vi ABSTRACT vii 1 GİRİŞ VE ÇALIŞMANIN AMACI 1
2 VERİ TOPLAMA SİSTEMLERİ HAKKINDA GENEL BİLGİLER 4
2.1 Mobil CBS Veri Toplama Sistemleri 4
2.2 Veri Toplama Sistemlerinin Avantajları 5
2.3 Mobil Veri Toplama Sistemlerinde Kullanılan Donanım ve
Yazılımlar 5
2.3.1 ArcPad Yazılımı ve Temel Özellikleri 6
2.3.1.1 ArcPad Yazılımı ile Yapılabilecek Uygulamalar 6
2.3.1.2 Desteklenen Veri Formatları 7
2.3.1.3 Gösterim ve Sorgulama 7
2.3.2 ArcPad Studio Yazılımı ve Temel Özellikleri 7
2.3.3 Kullanılan Farklı Donanım ve Özellikleri 9
2.4 Mobil Veri Toplama Sistemlerinin Kullanılan Kablosuz İletişim
Protokolleri 12 2.5 Mobil Veri Toplama Sistemlerinin Kullanım Alanları 14
2.6 GPS Entegreli Mobil Sistemler 15
3 MEVCUT VERİ TOPLAMA SİSTEMİ 17
3.1 Mobil Bilgisayar 18
3.2 Veri Toplama Yazılımı 19
3.4.2 Elektronik Pusula 24 3.5 Sayısal Veri Toplama Sisteminin Çalışma Prensibi 26
4 YERSEL FOTOGRAMETRİ 28
4.1 Dijital Fotogrametri 31
4.2 Temel Kavramlar 33
4.2.1 Dijital Görüntü 33
4.2.2 Dijital Görüntü Oluşturma Yöntemleri 37
4.2.2.1 Fotoğrafların Taranması 37
4.2.2.2 Dijital Kameralar 38
4.2.2.3 Tarayıcı Kameralar ve Diğerleri 38
4.2.3 Dijital Görüntü İşleme 39
4.2.4 Dijital Fotogrametrik Sistemlerin Temel Bileşenleri 40 4.2.5 Dijital Fotogrametrik Sistemlerde Uygulanan İşlem Adımları 41 4.2.6 Dijital Fotogrametri Yöntemi ile Elde Edilen Ürünler 44
4.3 Dijital Ortofoto 44
4.3.1 Dijital Ortofoto İle İlgili Tanımlar 44
4.3.2 Dijital Ortofoto Yapımı 45
4.3.3 Ortofoto Doğruluğu 48
4.4 Yersel Fotogrametride Kullanılan Kameralar 49
4.4.1 Metrik Olmayan Resim Çekme Makineleri 51
4.4.2 Metrik Resim Çekme Makineleri 51
4.4.2.1 Tek Makineler 53
4.4.2.2 Çift (Stereo) Makineler 53
4.4.3 Yersel Fotogrametride Kullanılan Dijital Kameralar 54 4.4.3.1 Polaroid PDC 2000 Dijital Kamerası 55 4.4.3.2 Kodak Dijital Kameraları 55 4.4.3.3 Rollei Dijital Kamerası 56
5.1 Entegre Edilecek Donanımlar 58
5.1.1 Metrik Kamera 58
5.1.2 Tablet Pc 59
5.2 Entegre Edilecek Yazılımlar 60
5.2.1 Erdas Imagine Yazılımı 60
5.2.2 PhotoModeller Yazılımı 61
6 UYGULAMA 63
6.1 Uygulama Bölgelerinin Seçilmesi ve Resimlerin Çekilmesi 63
6.2 Kontrol Noktalarının Belirlenmesi ve Ölçümü 64
6.3 Kodak P712 Kamerasının Kalibrasyonu 64
6.4 Ortho Görüntülerin Oluşturulması 65
6.4.1 Gps İle Belirlenen Kontrol Noktaları İle Ortho Görüntü
Oluşturulması 66 6.4.2 Lazer Mesafe Ölçer İle Belirlenen Kontrol Noktaları İle Ortho
Görüntü Oluşturulması 68 6.5 Ortho Görüntülerden SoftPlotter Yazılımı ile Kıymetlendirme
Yapılması 70
6.5.1 Ortho Görüntünün Import Edilmesi 70
6.5.2 Kıymetlendirme İşleminin Yapılası 72
6.5.3 KDMS – DGN Dönüşümü 72
6.6 Sonuçların İncelenmesi 73 6.6.1 Gps ile Belirlenen Kontrol Noktaları İle Oluşturulan Ortho
Görüntüden Yapılan Kıymetlendirme Sonuçları 73 6.6.2 Lazer ile Belirlenen Kontrol Noktaları İle Oluşturulan Ortho
Görüntüden Yapılan Kıymetlendirme Sonuçları 76 6.7 Farklı Örneklerle Gerçekleştirilen Çalışmaları 77 6.7.1 Kıymetlendirme Verisinin Grafik Gösterimle Karşılaştırılması 77
6.7.2 Renkli Görüntü İle Yapılan Kıymetlendirme 80
6.8 Resim Çifti Yardımı İle Sayısal Yükseklik Modeli (SYM) Üretimi
7 SONUÇ VE ÖNERİLER 97
7.1 Sonuçlar 97
7.2 Öneriler 99
KAYNAKLAR 101 ÖZGEÇMİŞ 105
1. GİRİŞ VE ÇALIŞMANIN AMACI
Coğrafi Bilgi Sistemleri (CBS) nin en çok maliyet ve zaman gerektiren bileşeni hiç kuşkusuz veri bileşenidir. Birçok farklı alanda kullanılan CBS için veri, genellikle arazide yapılan çalışmalarla elde edilmektedir. Klasik yöntemlerle grafiksel özellik gösteren verilerin toplanması oldukça zaman alıcı ve maliyetli bir işlemdir (Sheimy 1996). Günümüzde CBS kullanımındaki hızlı taleplerin karşılanabilmesi, uygulamalarda verinin hızlı bir şekilde dinamik olarak yerinde, yani bulunduğu mekânda toplanmasını gerektirmektedir. Bunun sonucunda, konumsal analiz ve karar verme işlemleri de hemen veri toplama aşamasında gerçekleşmiş olacaktır.
Teknolojik gelişimlere paralel olarak mobil bilgisayar sistemlerinin kullanıcılara sunulması ile beraber CBS yazılımlarının da mobil platformlarda çalışabilen versiyonlarının çıkması, CBS kullanıcılarının büroda yaptıkları bazı uygulamaları arazide gerçek zamanlı olarak yapmalarına imkân sağlamıştır. Donanım teknolojisindeki bu gelişmeler, CBS kullanıcılarına sahip oldukları dijital ortamdaki her türlü bilgi / veriyi araziye taşıma olanağı vermiştir (Döner 2004).
Bilgi sistemlerinin çağı olan bilgi çağı ve bilgi toplumlarında, bilginin sistemleşmesinde pek çok öznitelik verisinin referans edildiği tabanı oluşturan ve konumsal verilerden oluşan konum veri tabanına dayandığı ve GPS de bu günden sunduğu avantajlar birlikte düşünüldüğünde, gelecekte coğrafi bilgi sistemlerinin gereksinim duyduğu bu konumsal bilgiyi üretmede GPS’in (Global Positioning System ) son derece önemli bir araç olarak kullanılacağını gözler önüne sermektedir (Çorumluoğlu vd. 2003).
GPS ve mobil bilgisayarın beraber kullanıldığı veri toplama sistemleri günümüzde farklı disiplinler tarafından, farklı çalışmalar için kullanılmaktadır. Arazide envanter oluşturma çalışmaları, doğal kaynakların haritalanması, arsa-arazi değerlendirme çalışmaları, kaza ve doğal afetlerde rapor hazırlama çalışmaları, arazideki detaylarla ilgili bilgilerin toplanması veri toplama sistemlerinin kullanım alanlarını konu alan örnek çalışmalar olarak gösterilebilirler (Yomralıoğlu 2000).
CBS de konum verisinin elde edilmesi oldukça önemli ve güçtür. Bu anlamda geleneksel veri toplama yöntemlerine göre, en pratik alternatiflerden biri olarak GPS
benimsenmektedir. 1990’lı yılların ortalarından itibaren GPS güvenilirliğini ve sürekliliğini kanıtlamıştır.
Ayrıca 2000 yılının Mayıs ayından itibaren sivil GPS kullanıcılarının ölçülerine bilinçli olarak getirilen SA (Selective Availability) hatasının kaldırılmasıyla da mutlak konum belirleme doğruluğu ±10 metrenin altına inmiştir (Mintsis 2002). Günümüzde WAAS, EGNOS gibi sistemlerin de kullanılmasıyla optimum koşullardaki mutlak konum belirleme doğruluğu ±3 metre civarındadır (Hunter 2002). Bu doğruluğun yeterli olmadığı durumlarda DGPS gibi yöntemler kullanılarak ±50 cm ye kadar konumsal doğruluk elde etmek mümkündür (Url 3). Günümüzde oldukça uygun fiyatlarla taşınabilir boyutlara sahip GPS alıcıları üretilmekte ve bunlar da birçok CBS uygulamasında rahatça kullanılabilmektedir. Konum belirleme alanlarında gerçekleşen bu gelişmelerin paralelinde yaşanan bir diğer önemli teknolojik konuda kablosuz (wireless) iletişim sistemlerindeki gelişmelerdir. Mobil cihazlarla arazideki bir CBS kullanıcısı artık internet aracılığıyla sunulan bilgi ve haritalara ulaşılabilmekte, hatta gezici halde topladığı verileri anında diğer kullanıcılar ile paylaşabilmektedir. Burada sözü edilen tüm bu gelişmeler, CBS nin gezici olarak kullanılmasına olanak sağlayan Mobil Coğrafi Bilgi Sistemlerinin ortaya çıkmasını sağlamıştır. Sonuçta, bir Mobil Coğrafi Bilgi Sistemi; kablosuz iletişime dayalı, taşınabilir bilgisayar üzerinde CBS ve GPS in entegre olarak sunulduğu gezgin bir sistemdir.
Veri toplama sistemlerinde GPS ölçüsü yaparak detaylar toplanmaktadır. Ancak; detay yoğunluğunun fazla olduğu, doğal ya da yapay engellerden dolayı ölçü yapmanın zorlaştığı durumlarda farklı çözümlerin geliştirilmesine ihtiyaç duyulmaktadır. İşte bu noktada çözüm olarak yersel fotogrametrik sistemlerle bu tür veri toplama sistemlerinin bütünleşmesi düşünülebilir.
Bu çalışmada, kullanıcı ihtiyaçları doğrultusunda geliştirilebilir ve farklı alanlarda kullanılabilir özellikte son derece esnek bir sistem tasarlanmış ve sistemin arazi testleri de ayrıca gerçekleştirilmiştir. Bir yersel fotogrametri alım ve değerlendirme sistemi mobil veri toplama sistemlerine yazılım ve donanım takviyesi ile entegre edilebilir. Böylece veri toplama çalışmalarının arazi adımının çok daha hızlı, kolay, birim zamanda yapılan iş miktarını arttıracak şekilde ve ulaşılmaz bölgelere ulaşma olanağı da sağlanılarak gerçekleştirilmesi mümkün olur. Ayrıca arazinin zor
şartlarında çalışmak yerine, bir büronun araziye göre çok daha konforlu olan ortamında fotogrametrik değerlendirme sistemleri ile çalışma olanağı da sağlanmış olur.
Veri toplama sistemine entegre edilecek kalibrasyonu yapılmış dijital bir kamera ile temelde detayların yanına gidilmeden, alımı yapılacak bölgeye düzgün dağılmış kontrol noktaları aracılığı ile tüm verilerin toplanması mümkün olacaktır. Özellikle detay yoğunluğunun fazla olduğu doğal veya yapay engellerden dolayı detaylara yaklaşılamayan bölgelerdeki verilerin toplanması kalibre edilerek metrik değerleri belirlenmiş yüksek çözünürlüklü dijital bir kamera ile çekilen resimler üzerinden fotogrametrik değerlendirme tekniği yardımı ile gerçekleştirilebilecektir.
Bu amaçla, yapılan çalışmada; değişik durumlar için çekilen resimlerle değerlendirme yapılıp, elde edilen detayların konumsal doğrulukları her durum için araştırılmıştır. Bu kapsamda, el tipi GPS alıcısı ve lazer mesafe ölçer yardımıyla ölçüm yapılarak iki farklı yöntem ile kontrol noktaları ölçülmüş ve yersel Fotogrametrik yöntem kullanılarak da ortofoto görüntüler üretilmiştir. Bu ortofoto görüntüler üzerinden yapılan sayısallaştırma işlemi sonucunda ise, üretilen verilerin doğruluğu araştırılarak optimum bir çözüm yöntemi ortaya konmaya çalışılmıştır. Doğruluk araştırması için çalışma bölgesinin hava fotoğrafından kıymetlendirilmiş verileri kullanılmıştır.
2. VERİ TOPLAMA SİSTEMLERİ HAKKINDA GENEL BİLGİLER
Mobil CBS cihazlarının donanım ve yazılım takviyesi ile arazide konum ve öznitelik bilgisi toplayabilecek şekilde tasarlanmış şekline “Mobil CBS Veri Toplama Sistemi” adı verilmektedir.
2.1 Mobil CBS Veri Toplama Sistemleri
Bir Mobil Veri Toplama Sistemi şu üç temel teknolojiyi bütünleştirir; Veri toplama yazılımı, GPS ve taşınabilir işleme-depolama araçları.(Şekil 2.1)
Şekil.2.1 Taşınabilir İşleme ve Depolama Araçları
Tüm bu teknolojilerin bütünleştirilmesi; oluşturulan sistem sayesinde, veritabanına arazideki personel tarafından istenilen zaman ve mekânda tamamı ile erişilebilir ve müdahale edilebilir kılmaktadır.
Mobil CBS teknolojisi, veri tabanı ve uygulamalarına, analiz çalışmalarına, görüntüleme aygıtlarına ve karar verme mekanizmalarına eşzamanlı veri girişini olanaklı kılan bir sistem kurmanızı sağlamaktadır.
Son yıllarda yazılım ve donanım alanlarında yaşanan gelişmeler mobil CBS alanında da önemli ilerlemelere ön ayak olmuştur.
2.2 Mobil Veri Toplama Sistemlerinin Avantajları
• Arazide hızlı, doğru ve ekonomik olarak her türlü verinin dinamik olarak toplanmasına olanak sağlar.
• Dijital ortamdaki harita ve hava fotoğrafları gibi ürünlerin arazide kullanımını mümkün kılar.
• Arazide bir nesnenin konumu GPS ile belirlenip harita üzerinde dinamik olarak gösterilebilir.
• Arazide eşzamanlı navigasyon yapılabilir. • Arazide CBS konum analizleri gerçekleşebilir.
• İnternet üzerinden on-line sunulan haritalara ulaşmak ve kullanmak olanaklıdır. • Toplanan veriler kablosuz iletişim araçları ile uzaktaki herhangi bir adrese
gönderilebilir.
2.3 Mobil Veri Toplama Sistemlerinde Kullanılan Donanım ve Yazılımlar
Klasik CBS yazılımlarından farklı olarak, Mobil CBS için geliştirilmiş özel yazılımlar mevcuttur. Bunlara AutoDesk in OnSite, Intergraph ın IntelliWhere, ESRI nin ArcPad ve MapInfo nun MapXtent yazılımları örnek olarak verilebilir. Mobil CBS yazılımlarının temel amaçları, gezici cihazlar üzerinde CBS nin fonksiyonlarını yerine getirmekle beraber, kablosuz olarak, ağ üzerinden diğer CBS verilerine ulaşabilmektir. Ancak bu yazılımlardan ArcPad ve IntelliWhere, diğerlerinden farklı olarak GPS desteği sunar (Niu 2004). ArcPad ve Trimble in GPS ile veri toplamak için geliştirdiği TerraSync yazılımı veri toplamada yaygın olarak kullanılmaktadır. ArcPad ve TerraSync özel olarak, cep bilgisayarlar üzerinde GPS alıcısıyla ya da GPS olmaksızın arazide veri toplayabilecek şekilde tasarlanmıştır. ESRI firmasınca üretilen ArcPad yazılımı ile konumsal verilere ait öznitelik bilgileri de arazide aynı anda toplanabilmektedir.
Ayrıca ArcPad yazılımında özel kullanıcı uygulamaları için form, menü, araç çubuklar ve script (kısa yazılım) oluşturmak mümkündür. Böylece kullanıcıya özel geliştirilmiş arayüzler yardımıyla, arazide daha hızlı bir şekilde veri toplanması sağlanmış olur. Yazılımın diğer bir özelliği de arazideyken doğrudan harita
sunucularına bağlanarak internet ve benzeri ağlar üzerinden sunulan haritalara erişim olanağı sağlamasıdır (Url 1).
2.3.1 ArcPad Yazılımı ve Temel Özellikleri
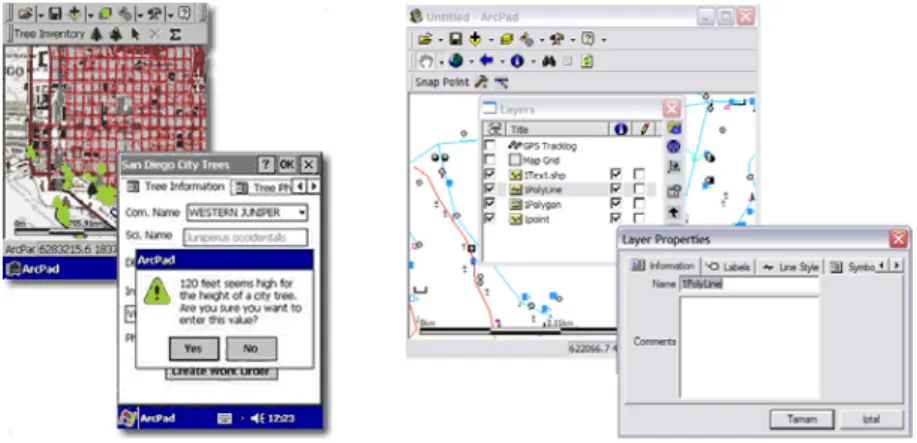
ESRI’ nin ArcPad (Şekil 2.2) uygulaması, ileri seviyede mobil (hareketli) haritalama ve Coğrafi Bilgi Sistemi teknolojisidir. ArcPad, veritabanı erişimi, haritalama, CBS ve GPS entegrasyonu gibi bilgileri arazi çalışmasında olan kişilere veya kurumlara PDA ya da küçük el aygıtları vasıtasıyla ulaştırabilir.
Şekil 2.2 Arcpad Yazılımının Ekran Görüntüleri
Veri toplama işlemi ArcPad uygulamasıyla çok kolaylaşmış ve anında geçerlilik denetimi, erişilebilirlik gibi özellikler kullanıcılara sunulmuştur.
2.3.1.1 ArcPad Yazılımı ile Yapılabilecek Uygulamalar
• Var olan verilerin kullanılması: ArcPad endüstri standardı vektör ve raster görüntü verilerini desteklemektedir.
• Internet üzerinden veri eklenmesi: Veriler Internet üzerinden veya wireless (kablosuz) teknolojisi kullanılarak aktarılabilir.
• Etkileşimli Haritalar: ArcPad, haritalar için büyütme, küçültme, pan, mekânsal yer imleri ve o anki GPS pozisyonuna göre harita ortalaması gibi özellikler sunar. • Veri sorgulamaları: Özelliklerin daha kolay görünmesi için işaretleme, kısayol
• Harita üzerinde uzaklık, alan ve kesişim hesaplamaları yapma imkânı.
• Veri düzenlemesi: fare işaretçisi, ışıklı kalem veya GPS yardımıyla mekânsal veri yaratım ve düzenlemesi.
• ArcPad uygulamasını GIS çözümlerinizde kullanabiliniriz. Hâlihazırdaki verilerinizi ArcGIS Desktop ya da ArcView 3.x üzerinde kullanma imkânı
2.3.1.2 Desteklenen Veri Formatları
• ESRI shapefiles • LizardTech MrSID • JPEG
• Windows bit map (.bmp)
• Internet üzerinden ArcIMS Image Service
2.3.1.3 Gösterim ve Sorgulama
• Özellik tespiti • Harita navigasyonu • Değişken zoom ve pan • Sabit zoom
• Özel bir katmana zoom veya mekânsal işaretleme • O anki GPS pozisyonuna harita ortalama
• Ölçek bağımlı katman gösterimi
• Dış kaynaklara kısayol oluşturabilme ( fotoğraf, doküman, video) • Uzaklık, alan ve kesişim hesaplamaları
• Özellik yer belirleme, etiketleme ve zoom
2.3.2 ArcPad Studio Yazılımı ve Temel Özellikleri
ArcPad Studio (Şekil 2.3), ArcPad yazılımının geliştirme platformudur. ArcPad Studio ile applet ve script dosyaları yaratılarak ArcPad yazılımı kişiselleştirilebilir. ArcPad, kullanıcılara kullanım açısından kolaylık sağlama ve esnek olması amacıyla
dizayn edilmiş olsa bile, isteğe ve ihtiyaçlara göre ara yüzünü değiştirmek mümkündür. ArcPad Studio uygulamasını kullanarak ArcPad ihtiyaç ve isteklere göre dizayn edilebilir.
Şekil 2.3 ArcPad Studio Yazılımının Ekran Görüntüsü
Aşağıdaki kişiselleştirme ve tasarım değişiklikleri ArcPad Studio ile gerçekleştirilebilmektedir.
• Orijinal versiyonda olan veya yeni araçlar kullanan yeni araç çubukları yaratılması.
• Alan çalışmalarına hız kazandırmak için özel form hazırlanması.
• ArcPad yazılımının iç öğeleriyle etkileşen ve yazılımın verimini arttıran script yazımı.
• Organizasyonun özgün amaçlarına ulaşması için yeni uygulamalar geliştirme. • Yeni formatları ve yer belirleme sistemlerini desteklemek için yeni eklentiler geliştirebilme.
Bütün modifikasyon ve kişiselleştirmeler bilgisayar ortamında gerçekleştirilip, daha sonra kullanılacak olan taşınılabilir depolama ortamına nakledilmektedir. ArcPad Studio detaylı dokümantasyon ve çevrimiçi yardım, örnek kodlar ve ilk sene servis ile beraber gelmektedir.
ArcPad Studio ortamı sade bir arayüze sahiptir. Kullanıcı oluşturduğu formlara nesneler ekleyebilir, bu nesnelere komutlar atayabilir. Program, Visual Basic mantığında tasarım yapmaktadır.
2.3.3 Kullanılan Farklı Donanım ve Özellikleri
Geleneksel cihazlardan farklı olarak mobil cihazlar iki temel ayırt edici özelliğe sahiptirler. Bunlar; “taşınabilirlik ve kapasite” dir. Kullanıcılar bir yandan daha küçük ve daha hafif taşınabilir cihazlar tercih ederken, diğer yandan grafiksel uygulamalar için geniş ekranlar ve güçlü işlemler için de yüksek işlemci kapasitesine ihtiyaç duyarlar. İletişim teknolojisinde mobil özelliğine sahip, farklı gezici cihaz örnekleri mevcuttur. (Şekil 2.4)
Şekil 2.4 Mobil CBS Sistemlerinde Kullanılan Donanımlar
Bunlar;
• Mobil Telefonlar
Bu grup en yaygın ve gelişmiş PIM (Personal Information Management) araçlarını, ağ ve diğer bilgisayar olanaklarını içine alacak şekilde tasarlanmış cihazlar içerir. Bu tür cihazlar, akıllı telefon bazlı tasarımlar nedeniyle sınırlı bir ekran genişliğinde
olup, yine sınırlı bir bellek kapasitesi (2-16 MB) ve işlemci hızına sahiptir (20-104 MHz). Bu tür cihazlar GSM/GPRS gibi WAN (Wide Area Network) ya da 3G hücresel sistemlerle Internet erişimi sağlayabilir ve modellerine bağlı olarak Bluetooth protokol, USB ya da kızılötesi bağlantı üzerinden diğer çevresel cihazlar ile iletişim kurabilirler (Bauman 2002).
• PDA Tabanlı Akıllı Telefonlar
Bu grup esasında, PDA (Personal Digital Assistant) olarak tasarlanmış mobil iletişim özelliklerini barındıran akıllı telefon cihazlarından oluşur. Bu cihazlar Wireless Markup Language (WML) yada Extensible HyperText Markup Language (XHTML) formatındaki hypertext sayfalar göstermek için cep telefonlarına kıyasla uygun olan daha geniş ekranlara sahiptirler. Bunlara ilave olarak; e-mail, Short Message Service (SMS) yada Multimedia Message Service (MMS) mesajları, hatta daha büyük dokümanlar oluşturmak, el yazısı tanıyabilme, dokunmaya duyarlı ekran klavye ve hatta katlanabilir klavyeler sayesinde işlemler PDA cihazlar ile daha kolayca gerçekleşir (Bauman 2002).
• PDA Cep Bilgisayar (Pocket PC)
PDA lar ilk piyasaya çıktıklarında kişi listesi, takvim, günlük not, hesap makinesi ve benzeri temel fonksiyonların yönetimini sağlayacak cihazlar olarak algılanmıştır. Ancak günümüzde bu cihazların gelişen özellikleri sayesinde, masaüstü bilgisayarlarda yapılan birçok temel işlem artık bu cihazlar ile gerçekleştirebilmektedir. Bu türden mobil cihazlar günümüzde Pocket PC olarak adlandırılmaktadır. Cep bilgisayarları özellikle Mobil CBS uygulamalarında en yaygın olarak kullanılan donanımlardır.
Günümüzde üç ana PDA cep bilgisayar işletim sistem platformu mevcuttur. Bunlara örnek olarak Palm OS, Windows CE ve EPOC OS verilebilir (Bauman 2002).
• Handheld bilgisayarlar
Bu gruptaki bilgisayarlar dizüstü bilgisayar özelliklerine benzer olmakla birlikte, daha küçük boyutlu ekrana (640x240 piksele kadar) sahip cihazlardır. Bu cihazlar genellikle Microsoft Windows CE işletim sistemiyle çalışırlar (EPOC ve Linux gibi
platformlarda mevcuttur). İşlemci, bellek ve kablosuz bağlantı özellikleri bakımından PDA cep bilgisayarlarına benzerler, ancak diğer grup cihazlara göre, ilave klavyeleri sayesinde kullanıcının daha rahat veri girişi yapmasına olanak sağlarlar (Bauman 2002).
• Tablet Bilgisayarlar
Tablet bilgisayarlar yukarıdaki cihaz gruplarına göre daha yüksek hızlı işlemcilere (1.5GHz), büyük dâhili disk sürücülere (40 GB), endüstri standartta arabirim bağlantılara, uzun batarya ömrüne, daha iyi ekran çözünürlüğüne (1050x1400 piksel), el yazısı tanıma yazılımlarına, geniş bir bellek kapasitesine (512 MB), genişletme fonksiyonlarına ve WLAN erişim olanaklarına sahiptir. Bu cihazlar standart Microsoft Windows işletim sistemlerinden birisiyle ya da Linux ile çalışabilirler. Özellikle arazi çalışmalarında kullanılan mapa benzeri bir tasarıma sahiptir.
• Notebook (Dizüstü Bilgisayarlar)
Bu cihazlar birkaç gruba ayrılabilir: büyük boyutlu, ince ve hafif, mini ve yarı dizüstü bilgisayarlar gibi. Bazı dizüstü bilgisayarlar standart bir cihaza göre daha fazla darbeye ve suya dayanabilecek şekilde tasarlanmıştır. Bu cihazların işlemci kapasiteleri, boyut ve ağırlıkları gibi mobil cihazlar arasında en büyük olanlarıdır. Geleneksel masaüstü bilgisayar özelliklerinin tümüne sahip olup, işlemci hızı 2,4 GHz ve depolama kapasiteleri 1 GB Ram ve 60 GB hard disk olan modeller mevcuttur.
• Lazer Mesafe Ölçme ve Elektronik Pusula Cihazı
Veri toplama sistemlerinde GPS ile detayların ölçülemediği durumlarda lazer mesafe ölçme cihazı (Şekil 2.5) ile detayın mesafesi elektronik pusula (Şekil 2.6) ile istikamet açısı (semt açısı) ölçülerek detayların koordinatları hesaplanabilir. Piyasada mevcut laser mesafe ölçme cihazları 200–1000 metre arasında mesafe ölçme kabiliyetine sahiptir.
Şekil.2.5 Lazer Mesafe Ölçer Şekil 2.6 Elektronik Pusula
2.4 Mobil Veri Toplama Sistemlerinin Kullanılan Kablosuz İletişim Protokolleri
Mobil Veri Toplama Sistemlerinde kullanılan veriler ya hafıza kartlarında ve depolama aygıtlarında saklanarak kullanılır ya da veri sağlayıcısına ait ağa bağlanılarak istenilen bilgi görüntülenir.
İlk yaklaşımda; arazide doğrudan toplanan bilgiler veya mevcut olan harita bilgileri lokal bellek üzerine kaydedilir. Bu durumda birtakım bellek sorunları söz konusu olabilir. Çünkü taşınabilir cihazların çoğu sınırlı bellek kapasitesine sahiptir. 2007 yılı itibari ile piyasada bulunan tipik bellek cihazları ve kapasiteleri şu şekildedir: Multi Media Kartlar (MMC, 4 GB ta kadar), Secure Dijital Kartlar (SD, 4 GB ta kadar), Compact Flash Kartlar (CF, 8 GB ta kadar), SmartMedia Kartlar (1 GB ta kadar), PC ye takılı Hard Disk Sürücüleri yada PCMCIA Kartlar (5 GB ta kadar). Örneğin Barselona gibi büyük bir kente ait; cadde ve alan isimleri, güzergâhlar, tek-çift yönlü yollar, ulaşım ve anıt bilgilerini içeren GDF formatındaki harita bilgileri yaklaşık 40 MB kadardır. Kapasitesi 1 GB olan harici bellek kullanılması halinde, Barselona kentine ait verilerin tam 25 kat büyüklüğünde bir veri grubu rahatça bellekte saklanabilir (Casademont 2004).
İkinci yaklaşımda ise; kartografik bilgiler sadece isteğe bağlı olarak yüklenir. Bu işlem kullanıcı açısından oldukça basit bir şekilde yapılır. Gezici CBS platformu gerekli haritanın lokal olarak kayıtlı olmadığı algılandığında kullanıcının onayını
aldıktan sonra haritayı cihaza yüklemeye çalışır. Mobil cihazlarla kartografik sunucunun oluşturacağı sabit bir ağ ile bağlantı kurabilmek için iki çeşit kablosuz ağ kullanılabilir. Bunlar; WLAN (Wireless Local Area Network) ve WWAN (Wireless Wide Area Network) dır. WLAN, isminden de anlaşılabileceği gibi birkaç metreden birkaç kilometreye kadar olan sınırlı bir kapsamaya sahiptirler. Ana özellikleri yüksek transfer hızı sağlamaları ve özel olarak sahiplenilmeleridir. WLAN ilk ortaya çıktığında ofis veri ağları olarak tanındı, daha sonra üniversite kampüsleri, hastaneler yada diğer özel ve kamu kurumlar için kapsama sağlayacak şekilde genişledi. Öte yandan WWAN ağlar ulusal kapsama sağlayan kamu ağlarıdır ve CDMA200, UMTS ya da FOMA gibi üçüncü kuşak hücresel ağlar için 2 Mbps a kadar olan daha düşük transfer hızı sağlarlar. Bu tür ağlar daha verimli bağlantı oluşturma hedef alınarak tasarlanmış olup, üzerlerinden veri aktarımı gerçekleştirme işlemi pahalıdır. WLAN ağlar için üç temel teknoloji söz konusudur (Casademont 2004). Bunlar;
• IEEE 802.11 WLAN için uluslar arası anlamda kabul gören ilk standart 26 Haziran 1997 yılında ortaya çıkmıştır. IEEE 802.11b 11 Mbps transfer hızına, IEEE 802.11a ve IEEE 802.11g 54 Mbps transfer hızına ve IEEE 802.11n 108 Mbps transfer hızına sahiptir. WEP (Wired Equivalent Privacy) algoritması gibi diğer istasyonların veri paketlerini anlamasını engelleyen güvenlik özellikleri bu standarda eklenmiştir.
• Bluetooth taşınabilir ve/veya sabit elektronik cihazlar arasında kabloyla yapılan bağlantı kurma işleminin yerini almak amacıyla bir noktadan birçok noktaya ses ve veri transferi için kısa dalga boylu radyo frekanslarını kullanan bir teknolojidir. Bu teknoloji bir cihazla diğerleri arasında evrensel bir radyo linkini kullanarak kabloların yerini almak amacıyla ortaya çıkmıştır. Son zamanlarda birçok teknolojik mobil cihaz bu arabirim ile donatılmış durumdadır. Normal menzili 10 metredir ve bu menzil 100 metreye kadar artırılabilir. Asimetrik data aktarım hızı 721 Kbps, simetrik data aktarım hız da 432.6 Kbps kadardır.
• Infrared (IrDA), Infrared Data Association kelimelerinin kısaltılmış halini temsil eder. IrDA, geniş bir teçhizat, bilgisayar ve iletişim araçları arasında noktadan noktaya transferi destekleyen düşük maliyetli kızılötesi veri alış verişini oluşturan bir
organizasyondur. Birçok mobil cihaz, menzili 1 metre ve aktarım hız 9.6 Kbps dan 4 Mbps a kadar olan bu arabirimle donatılmıştır.
WWAN ağlar ya da yaygın ismiyle mobil telefon ağları ilk olarak ses ağları olarak ortaya çıkan ağlardır. Ancak daha sonra veri aktarımının bir gereksinimi olarak her türlü verinin transferinde kullanılmıştır. Bu ağlar zamanla değişiklik geçirmiş ve kapasitelerine göre üç kuşak şeklinde sınıflandırılmıştır. Bu sınıflandırma 1, 2 ve 3. kuşak şeklindedir (Casademont 2004).
CBS gibi yoğun veri içeren uygulamalarda veri transfer hızı yüksek olmalıdır. Bu anlamda ikinci kuşak ağlar (2.5G) 144 Kbps lik yüksek hızlı mobil internet imkân sağlarlar. İkinci kuşak ağlarla multimedia olanaklar mümkündür. Önde gelen 2.5G ağlar GPRS (General Packet Radio System) ve CDMA2000 1x (Code Division Multiple Access 2000 1x) dir. 2001 yılının sonunda ilk üçüncü kuşak (3G) ağlar Avrupa da, Japonya da ve bölgesel bazlı olarak uygulanmıştır. 3G ağları, SVA (Streaming Video Application), MMS (Multimedia Messaging Services) ve LBS (Location Based Services) gibi gelişmiş uygulamalara 144 Kbps dan 2 Mbps kadar olan aktarım hızıyla olanak sağlamaktadır (Niu 2004).
2.5 Mobil Veri Toplama Sistemlerinin Kullanım Alanları
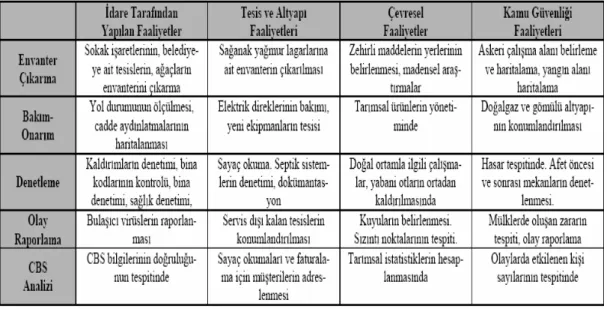
Günümüzde arazi çalışmalarında konumsal veriyi kullanan birçok uygulamada Mobil CBS nin sağladığı doğruluk ve verimlilikten yararlanılmaktadır (Tablo 1.1). Gezici özelliğe sahip bir coğrafi bilgi sistemi ile kullanıcı bürodaki yazılım donanım gereksinimlerine bağlı kalmaksızın, arazi de gerekli olan tüm işlemleri, tıpkı klasik CBS yaklaşımında olduğu gibi, doğrudan mobil cihazlar üzerinde gerçekleştirmektedir (Wilson 1998). Böylece CBS nin kullanıldığı uygulama alanlarında artış sağlanmakta ve CBS kullanımı her geçen gün yaygınlaşmaktadır. Mobil CBS nin kullanıldığı bazı temel uygulamalar şunlardır;
• Arazide envanter oluşturma çalışmalarında.
• Bakım - onarım çalışmalarında tablo bilgilerinin güncellenmesinde. • Doğal kaynakların haritalanmasında.
• Arazide denetim çalışmalarında.
• Arsa-Arazi değerlendirmede çalışmalarında. • Kaza, afet gibi olayların raporlama çalışmalarında.
• Arazideki doğal ve yapay detaylara ait verilerin toplanmasında.
• Sağlık amaçlı veri toplama, hastalıklarla mücadele, zararlı bitki/böceklerle mücadelede.
• Orman yangınları için riskli alanların belirlenmesi, koruma altındaki canlıların yaşam alanlarının belirlenmesi gibi çevresel çalışmalarda.
• Konuma dayalı analiz ve karar verme işleminde.
Tablo 1.1 Çeşitli Mobil CBS Uygulamaları (Url 2)
2.6 GPS Entegreli Mobil Sistemler
GPS, bir objenin uydu sinyalleri yardımıyla yerküre üzerinde doğru bir şekilde konumlandırılmasına olanak sağlar. GPS teknolojisi, dünya da birçok konum tespiti gerektiren uygulamalarda yoğun olarak kullanılmakla birlikte, hızlı veri saklama özelliğinden dolayı, CBS çalışmalarında da sıkça kullanılmaya başlanmıştır (Hunter 2002).
GPS alıcıları mobil cihazlara portlar üzerinden uygun kabloyla bağlanabilirken, piyasada cep bilgisayarlarının genişletme yuvalarına takılabilen el-GPS alıcıları da mevcuttur (Niu 2004).
Bazı üreticilerin alıcıları GPS uydular yanında WAAS ve EGNOS sistemlerinden de sinyal alarak ±3 metre civarında mutlak doğrulukta konum bilgisi sağlayabilirken, bazı el tipi alıcılar da DGPS desteği ile ±1 metreden daha iyi doğruluk sunabilmektedir (Url 3). Bu alandaki ticari pazara bir nevi Trimble firması hâkim olmakla birlikte Magellan ve Garmin marka el tipi GPS alıcıları da çok yaygın olarak kullanılmaktadır.
El-GPS alıcılar tek başına veri toplamak için kullanılabilir, ancak Mobil CBS uygulamalarında, bir CBS yazılımıyla birlikte mobil cihaz üzerinde gerçek zamanlı olarak konumsal veri elde etmek ve navigasyon yapmak amacıyla kullanılırlar. (Şekil 2.7).
Şekil 2.7 Aynı Zamanda Bir Cep Bilgisayarı Olarak da Kullanılan El Tipi GPS Alıcısı (Trimble Recon)
3. MEVCUT VERİ TOPLAMA SİSTEMLERİ
Arazide veri toplamaya yönelik çalışmalar için oluşturulan sayısal veri toplama sistemleri Şekil 3.1;
• Mobil bilgisayar, • Veri toplama yazılımı, • El tipi GPS alıcısı,
• Lazer açı ve mesafe ölçer,
olmak üzere dört ana bileşenden oluşmalıdır.
Bu bileşenler ölçü esnasında tek bir jalona monte edilerek veya bir kısmı topoğraf tarafından giyilen yelek üzerinde taşınmaktadır.
Şekil 3.1 Sayısal Veri Toplama Sistemi
Mobil bilgisayar, yağmur ve toz gibi kötü hava koşullarından etkilenmeden çalışılabilmesi amacıyla koruma kutusu içerisinde muhafaza edilmekte ve bilgisayara kalem imleç ile komuta edilmektedir.
GPS alıcısı ile mobil bilgisayar arasındaki veri iletişimi RS232 seri ara birim üzerinden kablo ile veya bluetooth ile kablosuz olarak yapılabilmektedir.
3.1 Mobil Bilgisayar
Veri toplama sisteminde verilerin depolandığı, veri toplama yazılımının çalıştırıldığı, GPS alıcısı ile lazer açı ve mesafe ölçerin ürettiği ölçülerin toplanıp işlendiği birimdir. Sayısal veri toplama sistemlerinde mobil bilgisayar olarak el tipi (avuç içi) bilgisayar (Şekil 3.2, Tablo 3.1) kullanılmaktadır.
Tablo 3.1 Avuç İçi Bilgisayar Özellikleri Birim Özellik
RAM 64 Megabayt
İşlemci 400 MHz Intel XScale İşletim Sistemi Windows CE
Ekran 3.5’’ renkli TFT İletişim Bluetooth, Infrared Batarya Lithium ion
Sayısal sistemlerle arazi çalışmaları yapılırken, altlık olarak kullanmak amacıyla, vektör veya raster veri kullanılabilmektedir. Örneğin %20 sıkıştırma oranına sahip bir *.sid formatındaki raster görüntünün ortalama boyutu 5-7 Mb arasındadır. Aynı alanın vektör verisi *.shp uzantısı ile detay yoğunluğuna göre 25-30 Mb arasında değerler almaktadır.
Düşük hafıza ve işlemci hızına sahip avuç içi bilgisayarlarda bu verilerin işlenmesi ve üzerine arazide detay toplanmasında sıkıntılar yaşanmaktadır. Bu tip yoğun veri kümeleri ile çalışılan sistemlerde avuç içi bilgisayar yerine tablet pc kullanılması daha uygun olacaktır.
3.2 Veri Toplama Yazılımı
Arazide veri toplamak amacı ile CBS tabanlı bir veri toplama yazılımı (Şekil 3.3) kullanılmaktadır. Bu yazılım kullanılarak öznitelik bilgileriyle beraber detaylar, nokta, çizgi ve alan tipi katmanlarda *.shp formatında toplanmaktadır. Bu yazılım ile bilgisayara bağlı GPS alıcısından bilgisayarın seri arabirimine gelen konum bilgileri veya kalem imleç ile işaretlenmek suretiyle otomatik olarak veri toplanabilmektedir. GPS alıcısı ile doğrudan nokta üzerinde ölçü yapılamadığı durumlarda, lazer ölçer ile ölçülen açı ve mesafe bilgileri kullanılarak merkez dışı veri toplanabilmektedir.
Şekil 3.3 Veri Toplama Yazılımı (ArcPad)
Veri toplama yazılımı bir semboloji kütüğü ile beraber gelmediğinden dolayı farklı detaylar farklı renklerle gösterilmektedir. Ancak kullanıcı ihtiyaçları doğrultusunda oluşturulacak semboloji kütüklerinin desteği ile kartoğrafik semboloji ile gösterim ve veri toplama gerçekleştirilebilir.
3.3 El Tipi GPS Alıcısı
Sayısal veri toplama sisteminin olmazsa olmaz elemanı olan GPS alıcısı, esas olarak WGS84 datumunda coğrafi koordinat üretmekte ve alıcı içindeki yazılım ile başka datum ve koordinat sistemlerine dönüştürülmektedir. Alıcı, Ulusal Denizcilik Elektronik Birliği (NMEA - National Marine Electronic Assosiation) veri iletişim protokolünü destekleyen (Tablo 3.2) ve kolay taşınabilir (mobil) bir yapıya sahiptir. Ayrıca alıcı ile dar alanlarda gerçek zamanlı Diferansiyel GPS (DGPS) ölçüsü
yapılabilmekte, geniş alanda ise gerekli iletişim sistemleri sağlandığı takdirde DGPS ölçüsü yapabilecek teknik özelliklere sahip bulunmaktadır.
GPS alıcısı (Şekil 3.4), üzerinde durulan detay noktasına ilişkin olarak alıcıda ölçülen bilgiler alıcı menüleri üzerinden NMEA protokolü aktif hale getirilip iletişim ayarları yapıldıktan sonra otomatik olarak bilgisayarın seri arabirimine akmakta, yazılım marifetiyle okunup, detay işaretlenmekte ve vektör katmana eklenmektedir. WAAS (Wide Area Augmentation System) ve EGNOS (The European Geostationary Navigation Overlay System) uydularının yayınladığı sinyalleri almaya yetenekli GPS alıcıları ile daha doğru ve hassas mutlak konum belirlenebilmektedir. Ortalama bir GPS alıcısında minimum bulunması gereken özellikler Tablo 3.3’de gösterilmiştir (Url 8).
Tablo 3.2 GPS Alıcısının Konum Ve Hız Belirleme Doğrulukları
Yatay Konum standart uydularla <7 metre, WAAS-EGNOS uydularıyla <3 metre Ortometrik
yükseklik < 10 metre
Hız 0.1 Knot
Tablo 3.3 GPS Alıcısında Aranan Minimum Teknik Özellikler Koordinat Sistemi UTM, Coğrafi, MGRS
Datum ED50, WGS84
Data Giriş Protokolu RTCM SC-104 Data Çıkış Protokolu NMEA 0183
Ölçü tipi Kod
Kanal sayısı 12 paralel kanal
Şekil 3.4 El Tipi GPS Alıcısı
3.4 Lazer Açı ve Mesafe Ölçer
Lazer teknolojisi ile çalışan mesafe ölçer (Şekil 3.5) ve elektronik pusula (Şekil 3.7) olmak üzere iki bileşenden oluşmaktadır. Bunlardan mesafe ölçer tek başına kullanılırsa mesafe ve düşey açı, elektronik pusula tek başına kullanılırsa istikamet açısı ölçülebilmektedir. İkisi beraber kullanıldığı durumda; durulan noktadan bakılan noktalara düşey ve yatay (istikamet) açılar ile mesafeler ölçülüp, koordinatı GPS alıcısı ile belirlenen noktadan konumu bilinmeyen başka noktalara (merkez dışı ölçüm ile) koordinat taşınması mümkün olmaktadır.
Lazer açı ve mesafe ölçer Bluetooth ile mobil bilgisayara bağlanarak ölçülerin bilgisayara otomatik olarak akışı sağlanmaktadır. Bluetooth kullanılamadığı durumlarda ise ölçülen açı ve mesafe bilgileri veri toplama yazılımında elle girilerek merkez dışı noktanın koordinatları bulunmaktadır.
Tablo 3.4 Lazer Açı Ve Mesafe Ölçer Teknik Özellikleri
Özellikler Metrik Kablo/Çubuk Tatbik Menzili 50 m Telefon direğine tatbik 150 m Taş yüzeyler / Binalar 250 m
Maksimum Mesafe 575 m
Mesafe Çözünürlüğü 0.01 m
Eğim Limitleri ± 90 ˚
Eğim Doğruluğu ± 0.1 ˚
Ağırlık 1 kg
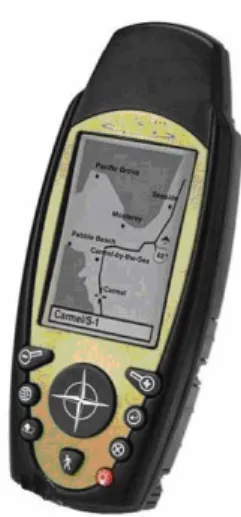
3.4.1 Lazer Mesafe Ölçer: Sayısal topoğrafik veri toplama sistemlerinde lazer mesafe ölçerin (Şekil 3.5 ve 3.6) bilgisayara bağlantısı kablo ile yapılabilir, ancak kablolarla sık olarak arızalar yaşandığı için, Bluetooth ile bağlantı tercih edilmektedir.
• Ölçme Seçenekleri
Lazer mesafe ölçerin 6 farklı ölçü seçeneği vardır. Bunlar Tablo 3.5’ de görülmektedir.
Tablo 3.5 Lazer Mesafe Ölçerin Ölçme Seçenekleri
İŞARET AÇIKLAMA HT Nesnenin yükseklini ölçer.
HD Nesneye olan yatay mesafeyi ölçer. VD Nesneye olan düşey mesafeyi ölçer. SD Nesneye olan eğik mesafeyi ölçer. INC Eğim açısını ölçer.
MULTI
Birden fazla ölçüm yapılmasını sağlar.
CUM, birden fazla ölçü yaparak ortalamayı ölçü olarak verir. DIFF, yapılan ölçülerin ortalamadan farkını verir.
• Ölçme Özellikleri
Lazer mesafe ölçerin 4 farklı ölçüme özelliği vardır. Bunlar Tablo 3.6’ da görülmektedir (Url 7).
Tablo 3.6 Lazer Mesafe Ölçerin Ölçme Özellikleri
İŞARET AÇIKLAMA
GATE
Maksimum ve minimum ölçü aralığı tanımlamakta kullanılır. G; seçeneğin aktif olduğunu gösterir.
S; minimum mesafe tanımlıdır. Tanımlı mesafeden uzun mesafeye ölçü yapar.
L; maksimum mesafe tanımlıdır. Tanımlı mesafeden kısa mesafeye ölçü yapar.
OFFSET Eğik mesafeden belirli bir mesafeyi çıkarır veya toplar. PIVOT Nesnenin tepesine ve tabanına yapılan ölçmelerin farkı.
FILTER Yalnız reflektörden gelen ışının algılanabilmesi için sensörün hassasiyetinin düşürülmesi.
• Ayarlar/Seçenekler
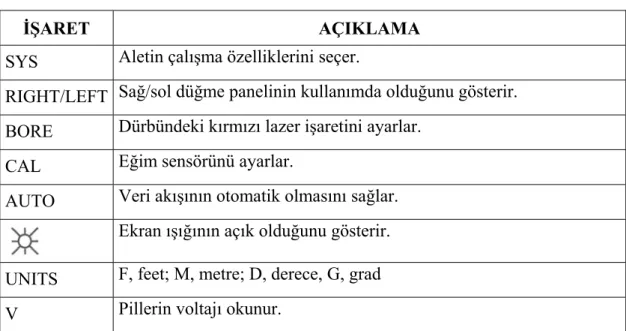
Lazer mesafe ölçerin 8 farklı menüden ayarlama seçeneği vardır. Bunlar Tablo 3.7’ de görülmektedir (Url 7).
Tablo 3.7 Lazer Mesafe Ölçerin Ayarları
İŞARET AÇIKLAMA SYS Aletin çalışma özelliklerini seçer.
RIGHT/LEFT Sağ/sol düğme panelinin kullanımda olduğunu gösterir. BORE Dürbündeki kırmızı lazer işaretini ayarlar.
CAL Eğim sensörünü ayarlar.
AUTO Veri akışının otomatik olmasını sağlar. Ekran ışığının açık olduğunu gösterir.
UNITS F, feet; M, metre; D, derece, G, grad V Pillerin voltajı okunur.
Şekil 3.5 Lazer Mesafe Ölçer (Url 7)
Şekil 3.6 Lazer Mesafe Ölçerin Ölçü Ekranı
3.4.2 Elektronik Pusula: Bakılan detayın istikamet açısını belirlemek için kullanılmaktadır (Şekil 3.7), cihaz ile manyetik istikamet açısı ölçülmektedir.
Şekil 3.7 Elektronik Pusula
Yıllık olarak hesaplanan manyetik sapma açı değerlerinin pusulaya girilmesi durumunda, cihaz ölçtüğü manyetik kuzey açısına sapma değerine ekleyip bakılan noktaların gerçek kuzeyden olan istikamet açı değerini hesaplamaktadır. Elektronik pusulanın özellikleri Tablo 3.8’ de görülmektedir.
Tablo 3.8 Elektronik Pusulanın Özellikleri (Url 7)
Azimut açısının ölçüldüğünü gösterir. Eğer manyetik sapma değeri girilmiş ise bu değeri dikkate alarak hesaplama yapar.
Manyetik sapma, mutlak sapma (pusulanın diğer manyetik alanlardan etkisini yok etmek için girilen tolerans değeri), grid sapma açısı girmek içim kullanılır.
Kullanıcı tanımlı koordinatlara göre rölatif azimut açısı ölçer.
Elektronik pusulanın kalibrasyonunda kullanılır.
Sistem menü ya da alt menüsünde olunduğunu gösterir. Alet ve çalışma özelliklerinin seçiminde kullanılır.
Ekran ışığının açık olduğunu gösterir.
Derece veya Grad cinsinden ölçü yapıldığını gösterir.
Ekranda görülen ölçünün tutulduğunu ve yüklemeye hazır olduğunu ifade eder. Eğer yanıp sönüyorsa ölçüye başlandığı anlamına gelir. Kullanıcı tarafından tanımlanmış herhangi bir 00 den azimut ölçülür. Verilen azimutu bulurken aktif olur (Aiming aid).
Pusulanın diklik toleransının aktif olduğunu gösterir (Level Aid). Ölçü sonrası istenilen azimuta yönlenme ve alet diklik toleransı uygulamalarının açık olduğunu gösterir.
Lazer mesafe ölçerden veri alındığını gösterir (CR400 seri veri formatı).
Verinin el bilgisayarına gittiğini gösterir.
Verinin el bilgisayarından ya da lazer mesafe ölçerden alındığını gösterir.
3.5 Sayısal Veri Toplama Sisteminin Çalışma Prensibi
Çevrede GPS sinyallerini etkileyecek (yansıtarak bozacak veya bloke edecek) engel yoksa GPS alıcısını doğrudan ölçülecek detay noktası üzerine tutarak ölçü yapmak esastır. Bunun mümkün olmadığı hallerde; GPS alıcısı engelsiz bir alana kurularak (Şekil 3.8 ve Şekil 3.9) lazer ölçerle diğer noktalara merkez dışından koordinat taşınır.
Alet kurulan bir istasyondan çok sayıda detay alınması gerektiği koşullarda ise GPS alıcısı engelsiz bir alana kurulup, lazer ölçerle diğer noktalara açı ve mesafe ölçerek koordinat taşınır.
Şekil 3.8 GPS Sinyallerini Bozan Detayların Ölçülmesi
4. YERSEL FOTOGRAMETRİ Resimlerin çekim yerine göre fotogrametri, • Yersel fotogrametri
• Hava fotogrametrisi
olmak üzere ikiye ayrılırken, değerlendirme sistemleri de üç yönteme ayrılır (Gürbüz 2003).
• Analog Fotogrametri • Analitik Fotogrametri • Sayısal Fotogrametri
Bunlardan yersel fotogrametride resimler yerden çekilir. Ülkemizde 1925 de 1:25000 ölçekli haritalar için fotogrametrinin ilk uygulanması yersel fotogrametri ile başlamıştır. Ancak bu yöntemle harita yapımında bazı zorlukların bulunması nedeniyle bu konuda yerini hava fotogrametrisine bırakmıştır. Harita yapımında yersel fotogrametrinin uygulanabilmesi için,
• Arazide yeterince yükseklik farkı bulunması
• Arazinin açık (ağaçsız) olması gerekmektedir (Gürbüz 2003)
Ayrıca bu yöntemle büyük alanların haritalanması zor olmakta, çok sayıda yer kontrol noktasının tesisi gerektiğinden, yapım zamanı ve maliyeti yükselmektedir.
Ancak fotogrametrinin harita yapımı dışındaki birçok uygulamasında örneğin mimarlık fotogrametrisinde, endüstri fotogrametrisinde, kriminoloji, tıp ve benzeri alanlarda yersel fotogrametri, günümüzde artan bir yoğunlukla uygulanmaktadır.
• Küçük kuruluşlar tarafından uygulanabilir olması
• Basit ve hava fotogrametrisine oranla ucuz aletlerle yapılabilmesi • Küçük alanlar ve dar kapsamlı konular için daha ekonomik olması • Büyük ölçekli resimlerin kolaylıkla çekilebilmesi
• Resim çekiminde kamera sabit olduğundan, uzun poz süreleri uygulanarak ince taneli filmler kullanılıp ayırma derecesi yüksek görüntülerin elde edilebilmesi gibi hususlar da etken olmaktadır.
Yersel fotogrametri, incelenecek şeyin (objenin) ve kameranın hareket durumuna göre üç guruba ayrılabilir. Bunlar;
• Statik (Duran cisimlerin duran kameralarla incelenmesi)
• Yarı statik (Hareketli cisimlerin duran kameralarla çekilen resimleriyle incelenmesi)
• Dinamik (Hareketli cisimlerin, hareketli kameralarla çekilen resimleriyle incelenmesi) (Gürbüz 2003)
Uzun yıllar boyunca kullanılan klasik yersel fotogrametri yönteminde belgeleme ve Röleve amacıyla fotoğraflar metrik kameralar ile çekilmekteydi. Tarihi ve kültürel mirasın özellikleri göz önünde bulundurularak mono olarak çekilen fotoğraflar tek fotoğraf değerlendirmesi (rödresman), ya da stereo çekim durumunda analog stereo değerlendirme aletlerinde değerlendirilmekteydi. Sayısal fotogrametri yöntemi ile birlikte yarı metrik kameralar ya da sayısal (dijital) kameralar ile çekilen fotoğraflar sayısal fotogrametrik değerlendirme aletlerine aktarılmaktadır. Bütün yöneltme ve çizim işlemleri bilgisayar ortamında gerçekleştirilmektedir. Sayısal fotogrametri yöntemi, otomatik ölçme işlemleri, sayısal üç boyutlu vektör veri, sayısal ortofoto, sayısal arazi ve yüzey modelleri gibi birçok imkânlar sunmaktadır.
Gelişen bilgisayar ve bilgi teknolojileri ile birlikte sayısal yersel fotogrametri yöntemi ile elde edilen sonuç ürünler, belgeleme ve fotogrametrik röleve amacı dışında sayısal
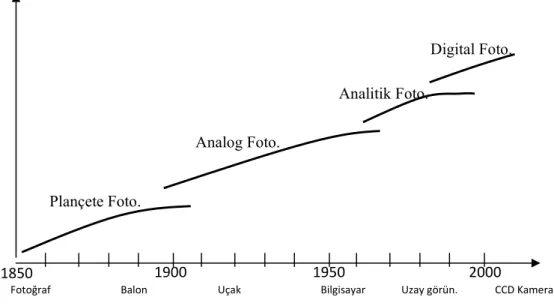
CAD ortamında tarihi ve kültürel mirasın üç boyutlu modellenmesi, üç boyutlu verinin görselleştirilmesi, elde edilen verilerin yönetilmesi ve CBS ortamına aktarılarak bu verilerin sorgulanması gibi birçok uygulamada kullanılmaktadır (Çorumluoğlu 2003). Fotogrametri, merkezi izdüşüm ve perspektif temellerinin ortaya çıkmasından başlayarak, bilgisayar teknolojisindeki gelişmesi ile birlikte günümüze kadar dört farklı gelişim evresi geçirmiştir (Şekil 4.1) (Demirel 1998).
Gelişim evreleri incelendiğinde, fotoğrafın bulunmasından sonra analog fotogrametriye geçiş yaklaşık yüzyıl, analog fotogrametriden analitik fotogrametriye geçiş yaklaşık yarım yüzyıl, analitik fotogrametriden dijital fotogrametriye geçilmesi ise yaklaşık 20 yıl sürmüştür (Gruen 1988). Dört süreç içerisinde en hızlı geçişin analitik fotogrametriden dijital fotogrametriye geçiş olduğu gözlenmektedir. Bununla birlikte bu geçiş süreci içerisindeki bilgisayar teknolojisindeki gelişmeler dikkatle incelendiğinde bu geçiş evresinin aslında o kadar da kısa bir süreç olmadığıdır.
Şekil 4.1 Fotogrametrinin Gelişim Evreleri.
Digital Foto. Analitik Foto. Analog Foto. Plançete Foto. 2000 1950 1900 1850
4.1 Dijital Fotogrametri
Fotoğrafla başlayıp, optik-mekanik aletlerle devam eden fotogrametri yöntemine Analog Fotogrametri, fotoğraf ile başlayıp bilgisayar destekli aletler ile devam eden fotogrametri yöntemine Analitik Fotogrametri adı verilir. Üçüncü ve son gelişmiş olan fotogrametri yöntemi ise Dijital Fotogrametri'dir. Dijital fotogrametri tekniğinde, kamera görüntü düzlemindeki ışıklandırma fotografik olarak değil, elektronik olarak kaydedilir. Müteakiben, insan gözlemini ve tanımasını kolaylaştıran bilgisayarlı tekniklerle devam eder (Demirel 1998).
ISPRS Çalışma Grubu II/III ’ün tanımıyla dijital fotogrametrik sistemler, manuel ve otomatik tekniklerin kullanılmasıyla dijital görüntülerden fotogrametrik ürünler türetmeye yarayan donanım ve yazılımlar olarak ifade edilmiştir. Bir başka ifade ile dijital fotogrametrik sistemler, girdi olarak dijital görüntüleri kullanan sorgulamalı veya yarı otomatik yöntemlerle tüm fotogrametrik görevleri yerine getirebilen yazılım ve donanımlardan oluşur (Karataş ve Altay 1995).
Dijital fotogrametride, analog ve analitik fotogrametriden farklı olarak kamera görüntü düzlemindeki ışıklandırma fotografik olarak değil, elektronik olarak kaydedilir (Demirel 1998). Dijital fotogrametride görüntünün radyometrik bilgisi kullanılır. Örneğin bir hedef nokta vektörünün tanımlanmasında Analog fotogrametrideki üç boyut, Dijital fotogrametri için dördüncü boyuta genişletilmiştir. Buradaki dördüncü boyut ile piksel radyometresi kastedilmektedir.
TAF = {X,Y,Z(X,Y)} (4.1)
TDF = {X,Y,Z(X,Y),G(X,Y)} (4.2)
Dijital görüntüye özgü radyometrik dördüncü boyut ile fotogrametri, artık geleneksel film fotogrametrisi için uygun olmayan dijital fotogrametrik işlemi otomatikleştirmek için birçok algoritma tipleri ile sunulmaktadır (Lue 1997).
Temel görevi sayısal görüntülerden üç boyutlu bilgilerin çıkarılması olan dijital fotogrametrik sistemlerde veri akışı ana hatları ile Şekil 4.2’deki gibi gösterilebilir (Fritsch 1995).
Şekil 4.2 Dijital Fotogrametrik Sistemde Görevler
Dijital Fotogrametrik Sistemlerdeki temel elemanlar aşağıdaki gibi özetlenebilir : • Yüksek çözünürlüklü tarayıcılar veya dijital kameralar,
• Dijital görüntünün işlenmesi aşamasındaki fotogrametrik işlemlere olanak sağlayan bilgisayar donanım ve yazılımı,
• Fotogrametrik işlemler sonucunda elde edilen ürünler. Bu ürünler CAD, CBS veya sayısal harita gibi bilgisayar ortamında saklanır veya ortofoto,vb. gibi çıktıları alınır. Bütün mühendislik alanlarında olduğu gibi dijital fotogrametride de, veri toplama ve toplanan verilerin işlenmesi önemlidir. Şekil 4.3'de dijital fotogrametrideki veri akışı, Şekil 4.4'de de verilerin işlenmesindeki iş akışı gösterilmiştir (Altan 1998).
4.2 Temel Kavramlar 4.2.1 Dijital Görüntü
Dijital görüntüler bilgisayarlardaki özel dizilerdir. Bu dizideki her eleman aynı özelliğe sahiptir. Bu elemanlar görüntünün yapı taşları olup piksel olarak bilinmektedirler. Dijital görüntü bir pikseller bütünüdür. Görüntü kalitesini üç faktör belirlemektedir. Konum çözünürlüğü, radyometrik çözünürlük ve boyut. Dijital görüntünün konum çözünürlüğü piksel boyutundan türetilmektedir. Piksel boyutu ne kadar küçülürse dijital görüntü kalitesi o kadar artacaktır. Radyometrik çözünürlükten bir pikselin alabileceği renk değerlerinin miktarı anlaşılmaktadır. Örneğin 8 bitlik radyometrik çözünürlükten, bir pikselin 28= 256 farklı renk değeri alabileceği anlaşılmaktadır. Radyometrik çözünürlüğün diğer bir özelliği ise görüntüdeki kanal sayısıdır. Bu kanallar çeşitli formlarda olabilmektedir. Bunlardan en yaygın olanları:
Şekil 4.3 Digital Fotogrametride Veri Akışı Klasik Kamera Foto Lab Tarayıcı CCD Kamera DigitalGörüntü Digital Fotogrametri Ünitesi CAD Sistem
• Gri Scala
• RGB (Red, Green, Blue) • CMY (Cyan, Magenta, Yellow)
Gri seviye görüntüler genellikle 8 bit formundadır. Yani her piksel 0-255 değerleri arasında toplam 256 değişik değer alabilmektedir. RGB formunda bir pikselin her kanalı gri seviyede olduğu gibi 0 ile 255 arasında bir renk değeri almaktadır. CMY formu RGB formu gibi olup sadece kanalların aldığı renkler değişmektedir.
Üçüncü özellik ise görüntünün boyutudur. Bu değer görüntüye karşılık gelen satır ve sütun dizilerindeki piksellerin miktarı ve piksel boyutundan türetilmektedir (Altan ve Çelikoyan 1999).
Şekil 4.4 Dijital Fotogrametride Veri İşlenmesi
Her pikselin, bulunduğu konumunu gösteren satır ve sütun numarası vardır, dolayısıyla bir koordinat sisteminde yeri bellidir. Bir pikselin boyutu, dijital görüntü elde etmede kullanılan kamera veya tarayıcının ayırma gücüne bağlı olarak değişmektedir (Örneğin 6-200 mikron arasında olabilir).
Örnek olarak 23 cmx23 cm boyutundaki hava fotoğrafının 50 mikron boyutundaki piksellerle sayısallaştırılmasında yaklaşık 25 milyon piksel bulunmaktadır. Bilindiği gibi her bir pikselin konumu (satır – sütun numarası) ve parlaklığı (gri değeri) tam sayılar ile ifade edilir. Bütün pikseller için bu sayılar ortaya konduğunda, görüntü tam sayılardan oluşan bir matris ile gösterilmiş olur. Bu matris, bilgisayarda veri işlemenin temel elemanlarını oluşturur (Castelman 1995).
Eğer dijital görüntü fotogrametrik amaçlar için kullanılacak ise piksel ile ξ, koordinat η sistemi arasında bir bağlantı olmalıdır. Şekil 4.5' de görüldüğü gibi gij, pikselin
merkezine yani orta noktasına karşılık gelmektedir. i indeksine ξgörüntü koordinat bileşeni, j indeksine de η görüntü koordinat bileşeni karşılık gelmektedir. gij olarak
gösterilen pikseller bilgi depolayıcısıdır. Tabi ki piksellerin kapasitesi kullanılan kayıt cihazlarının çeşidine ve bilgisayara bağlıdır. Günümüzde en çok kullanılan değer kapasitesi 0' dan 255' e kadardır. Bu kapasite, insan gözünün sahip olduğu farklılaşma kapasitesinin çok üzerindedir. Bilginin içerdiği 256 farklı değer, 8 bit yani 1 byte içinde depolanabilir. Siyah-beyaz resimlerde olduğu gibi renkli resimlerde de pikseller 256
farklı değer alır. Ama burada üç tane aynı boyuta sahip görüntü matrisine gereksinim duyulur. Bu sayede üç tabakalı görüntü bloğu elde edilir (Kraus ve Waldhausl 1993). Böylelikle, klasik ölçümlerle elde edilmiş olan görüntü koordinatları yerine, dijital fotogrametride piksellerle tanımlanmış görüntü koordinatları elde edilmiş olur.
4.2.2 Dijital Görüntü Oluşturma Yöntemleri
Dijital fotogrametri için veri toplama çeşitli yöntemler ile elde edilebilir. Dijital fotogrametri için gerekli olan dijital görüntüler, analog fotoğrafların sayısallaştırılması yoluyla dolaylı olarak elde edebildiği gibi dijital kameralar ya da uzaktan algılama algılayıcıları tarafından elde edilen doğrudan dijital görüntüler olarak da elde edilir. Dijital fotogrametrik çalışma istasyonları, fotoğrafların optik bir sistem yerine bilgisayar ekranından görülebildiği analitik bir kıymetlendirme aleti olarak düşünülebilir.
4.2.2.1 Fotoğrafların Taranması
Yüksek geometrik doğrulukla dijital veri sağladıkları için günümüzde en çok tercih edilen yöntemdir. Ulusal harita organizasyonları genelde dijital görüntülerin yüksek performanslı kameralarıyla çekilen hava fotoğraflarının, yüksek performanslı tarayıcılar tarafından taranması yoluyla elde edilmesini tercih etmektedirler. Böylece hem analog-analitik üretim, hem de dijital üretime olanak sağlanmış olmaktadır ki, ekonomik şartlar göz önünde tutulduğunda bunun çok gerçekçi bir yaklaşım olduğu gözlenmektedir. Fotogrametrik üretim işlemlerindeki görüntü tarama ile ilgili ekonomik ve teknik deneyimlere dayanan bildiriler, bilimsel ve teknik literatürde fazla yaygın değildir (Tolegard 1998).
Fotoğrafların hem analitik hem de dijital sistemlerde kullanımı, foto tarayıcılarda performans ihtiyaçlarına dikkat çekmektedir. Analitik alet ve yöntemlerinin geometrik doğruluğu, tarayıcılarında aynı oranda yüksek ayarlılık ve küçük piksellerde tarama olanaklarına sahip olmasını gerektirmektedir (Tolegard 1998).
4.2.2.2 Dijital Kameralar
Üç boyutlu objeleri kayıt etmek amacıyla kullanılan dijital kameralar iki boyutlu sensörleri üzerinde ihtiva etmektedir. Sensörler ayarlanmış zaman aralıklarında analog sinyalleri algılamaktadırlar. Daha sonra bu sinyaller için analog/dijital dönüşümü yapılır. CCD (Charge Coupled Devices) sensörlü kameralar dijital kameralar içinde en duyarlı görüntüyü elde eden kameralardır. Bu kameralarda görüntü içerisindeki piksellerin tamamı aynı anda kaydedildiği için, görüntü geometrisindeki platform hareketinin dinamik etkilerini ortadan kaldırması büyük bir avantajdır. Günümüzde CCD teknolojisi ile büyük formatlı fotoğrafların 7.5µm piksel boyutuyla bütün olarak görüntülerini almak mümkün değildir. Bu yüzden fotoğraflar parça CCD sensörler yardımı ile taranır ve daha sonra birleştirilebilir. Bunun için CCD sensörlerinin kameranın görüntü düzlemi üzerinde çok doğru mekanik konumlanmasına ihtiyaç vardır (Gürbüz 2003).
4.2.2.3 Tarayıcı Kameralar ve Diğerleri
Tarayıcı kameralar görüntülemede dinamik işlemlerle karakterize edilmişlerdir. Burada sensörler ile görünümün bağıl bir hareketi söz konusudur. Görüntüleme geometrisi genel olarak normal kameralardan farklıdır. Dolayısıyla kullanılacak fotogrametrik yazılımın geometrik bölümleri de buna uygun olarak değiştirilmelidir. Görüntülenecek nesne görüntüleme esnasında hareket eder ya da şeklini değiştirirse, nesnenin değişiklik zamanları koordinatlandırılmalıdır.
Tarayıcı kameraların foto-tarayıcılardaki gibi nokta, çizgi gibi alan sensörleri olabilir. Bazı görüntüleme sistemleri stereo görüntüler sağlayabilmektedirler (SPOT). Pankromatik, multi-spektral veya her ikisinin birden mevcut olduğu sistemler vardır (Tolegard 1998).
Tarayıcı ve dijital kameraların avantajları doğrudan dijital görüntü elde etme olup, bu tip görüntülerde yöneltme yapılmasına gerek yoktur.
Tarayıcı kameralar genellikle uzaktan algılama uygulamalarında kullanılmakta olup uydu platformları üzerine yerleştirilmişlerdir. Örnek olarak SPOT, LANDSAT uyduları
verilebilir. Uydu görüntüleri taranmış hava fotoğrafları ile karşılaştırıldığında daha düşük çözünürlüğe sahiptir, fakat daha geniş alanları kapsayabilmektedir.
Tarayıcı kameralardan bazılarının; örneğin SPOT uydularının elde ettiği görüntülerde çözünürlük 10 m.’ye kadar düşmektedir ki böyle görüntüler topoğrafik uygulamalar için de elverişlidir (Tolegard 1998).
Diğer dijital görüntü elde etme yöntemleri ise uzaktan algılamada kullanılan RADAR, SAR vb. görüntülerdir. Fakat bu görüntülerin topoğrafik uygulamaları henüz yaygın değildir.
4.2.3 Dijital Görüntü İşleme (Dijital Image Processing)
Dijital görüntü işlemenin temeli dijital veya sayısallaştırılmış fotoğraflara dayanmaktadır. Günümüzde fotoğrafların sayısallaştırılması yöntemi yaygın olarak kullanılmaktadır. Dijital görüntü işleme, dijital görüntülerden grafik, fiziksel ve grafik olmayan bilgilerin bilgisayar işlemleriyle çıkarılmasıdır. Görüntü işlemede kullanılan temel işlemler şu şekilde sıralanabilir:
• Görüntü Zenginleştirme (Image Enhancement), • Geometrik Düzeltmeler (Geometric Corrections), • Radyometrik Düzeltmeler (Radiometric Corrections), • Filtreleme İşlemleri,
• Bölgesel Görüntü İşlemleri (Özbalmumcu 1994).
Dijital görüntü verilerinin bilgisayarda ele alınması geometrik görüntü düzeltmeleri ve görüntü dönüşümleri için bütün olanakları işaret etmektedir. Birleştirilmiş yeniden örnekleme zaman alıcı olmakla birlikte teknik ve matematiksel anlamda bir sınırlama mevcut değildir. Görüntü düzeltmelerinin sınırları, hata modelleme, görüntü sistemi kalibrasyonu dışında düzeltme teknikleriyle elde edilememektedir. Dijital görüntü verilerinde özel olarak uygulanan diğer bir görüntü düzeltme işlemi daha mevcuttur. Bu da analitik fotogrametride uygulanamayan radyometrik görüntü düzeltmeleridir. İşlemler
görüntü sıkıştırma ve histogram dönüşümleriyle görüntü yükseltme, filtreleme tekniklerini içermektedir. Dijital görüntülerde görüntü detaylarının daha iyi gözlenmesi ve yorumlanması konusunda çeşitli olanaklar sağlar.
Teknik aletlerin gücüne bağlı olarak, düşük düzeyli görüntü düzeltmeleri dijital görüntü işlemede önemli bir potansiyele sahiptir. Ancak bu işlem düzeyi dijital fotogrametrinin gelişimi için yeterli değildir. Bunun yanısıra analitik fotogrametri yöntemine oranla diğer birçok avantajı daha mevcuttur. Bunlar orta ve yüksek seviyeli görüntü işleme uygulamalarını da içerirler. Günümüzde, dijital fotogrametrideki çoğu çabalar orta seviyeli görüntü işleme yöntemlerine, özellikle otomasyon ölçütlerinde önemli bir yer tutan görüntü eşlemeye yönelmiştir. Dijital fotogrametrinin başarısı otomatik eşleme işlemlerinin kalite ve hızına bağlıdır.
Fotogrametrinin geleceğinde büyük öneme sahip olabilecek diğer büyük bir dijital yöntem potansiyeli de çoklu veri işleme olarak bilinen farklı verilerin sürekli işlenişi ve çoklu sensör sistemiyle ilgilidir. Ayrıca coğrafi bilgi sistemlerinin bir parçası olarak dış verilerle görüntülerin entegrasyonunu da göz önünde tutmak gerekmektedir.
4.2.4 Dijital Fotogrametrik Sistemlerin Temel Bileşenleri
Dijital fotogrametrik sistemlerde olması gereken temel donanım bileşenlerini şu şekilde özetleyebiliriz:
• Stereo Görüntüleme Sistemi: Sayısal formattaki görüntülerden yöneltme işlemlerinin yapılabildiği, monoskopik veya stereoskopik görüntülemenin yapılabildiği, veri toplama, işleme, düzeltme ve dönüşüm işlemlerinin yapılabildiği, çeşitli girdi ve çıktı arabirimleri ile desteklenen temel donanım bileşenidir.
• Tarayıcı: Yüksek geometrik ve radyometrik doğrulukla, siyah-beyaz veya renkli hava fotoğrafı ve uydu görüntülerini, çeşitli çözünürlüklerde tarayarak sayısal forma dönüştürmeye yarayan, önemli bir girdi birimidir.
• Hassas Çıktı Cihazı: Elde edilen raster veya vektör verilerin hassas bir şekilde grafik çıktılarının alınmasına olanak sağlayan bir bileşendir.