Indoor multi-person tracking via ultra-wideband radars
Tam metin
Şekil
![Figure 2.1: Applications and business opportunities for low rate UWB systems [1].](https://thumb-eu.123doks.com/thumbv2/9libnet/5799528.118156/16.918.224.738.166.432/figure-applications-business-opportunities-low-rate-uwb-systems.webp)
![Figure 2.4: Illustration of the interface to a P410 MRM [2].](https://thumb-eu.123doks.com/thumbv2/9libnet/5799528.118156/25.918.214.747.364.588/figure-illustration-interface-p-mrm.webp)
![Figure 2.6: Configuration window [2].](https://thumb-eu.123doks.com/thumbv2/9libnet/5799528.118156/26.918.178.785.457.845/figure-configuration-window.webp)
![Figure 2.7: Control window [2].](https://thumb-eu.123doks.com/thumbv2/9libnet/5799528.118156/27.918.226.735.167.580/figure-control-window.webp)
![Figure 2.8: Control window [2].](https://thumb-eu.123doks.com/thumbv2/9libnet/5799528.118156/28.918.231.734.166.573/figure-control-window.webp)
![Figure 2.9: P410 MRM with attached broadspec antennas [2].](https://thumb-eu.123doks.com/thumbv2/9libnet/5799528.118156/29.918.246.724.167.491/figure-p-mrm-attached-broadspec-antennas.webp)

Benzer Belgeler
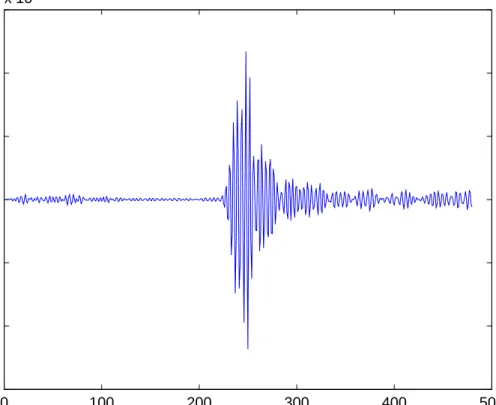
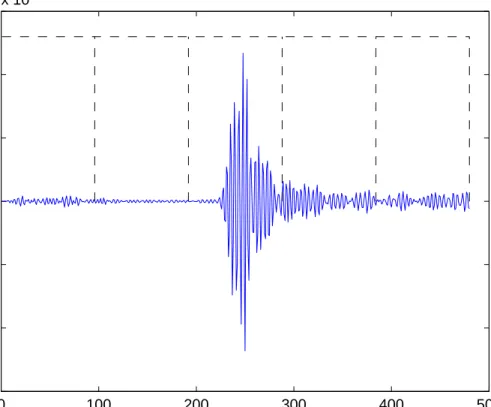
The designed antenna is used to transmit a second derivative Gaussian pulse and the received third order Gaussian like signal is as shown in Figure
Kıym etli üstat doktor general Besim Ömer
Yavaş piroliz ile daha çok katı ürün elde edilirken, alternatif sıvı yakıtlara duyulan ihtiyacın artmasıyla birlikte, yüksek ısıtma hızlarıyla sıvı
The parameters required for the lumped equivalent circuit of Mason are shunt input capacitance, turns ratio and the mechanical impedance of the membrane. Of course the collapse
We also wish to make a clear distinction between the collective modes generated by the single-particle excitations between dierent Landau levels, also known as
We demonstrate red-shifting absorption edge, due to quantum confined Stark effect, in nonpolar InGaN/GaN quantum structures in response to increased electric field, while we show
Tamiolaki (eds.), Thucydides between History and Literature (Berlin 2013) 73–87, at 80–81, also notes the traditional joining of limos and loimos and suggests that Thucydides
To determine the impact of news shocks on inbound tourism demand to Turkey, this study investigated the tourist arrival rates (the growth rate of arrivals or, in other words,
