T.C.
SELÇUK ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
TUSAGA-AKTİF NOKTALARINDA RENKLİ
GÜRÜLTÜLERDEN ARINDIRILMIŞ HIZ
BİLEŞENLERİNİN BELİRLENMESİ
Sercan B
ÜLBÜL
DOKTORA TEZİ
Harita Mühendisliği Anabilim Dalını
Kasım-2018
KONYA
Her Hakkı Saklıdır
Bu tezdeki bütün bilgilerin etik davranış ve akademik kurallar çerçevesinde elde
edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalışmada bana ait
olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and
presented in accordance with academic rules and ethical conduct. I also declare that, as
required by these rules and conduct, I have fully cited and referenced all material and
results that are not original to this work.
Sercan BÜLBÜL
14 Kasım 2018
iv
ÖZET
DOKTORA TEZİ
TUSAGA-AKTİF NOKTALARINDA RENKLİ GÜRÜLTÜLERDEN
ARINDIRILMIŞ HIZ BİLEŞENLERİNİN BELİRLENMESİ
Sercan BÜLBÜL
Selçuk Üniversitesi Fen Bilimleri Enstitüsü
Harita Mühendisliği Anabilim Dalı
Danışman: Prof. Dr. Cevat İNAL
2018, 156 Sayfa
Jüri
Danışmanın Prof. Dr. Cevat İNAL
Prof. Dr. Bayram TURGUT
Prof. Dr. Ekrem TUŞAT
Doç. Dr. İsmail ŞANLIOĞLU
Doç. Dr. Salih ALÇAY
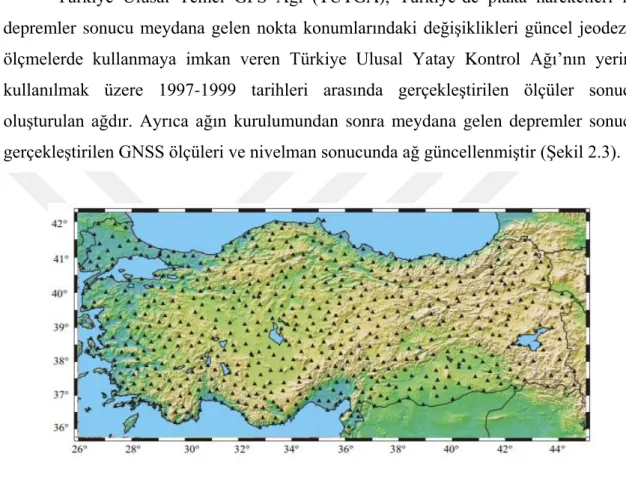
Günümüzde nokta konumları GNSS teknikleri ile belirli bir referans epoğunda seçilen referans noktalarına dayalı olarak belirlenebilmektedir. Bu yöntemle belirlenen nokta koordinatları kullanılarak uygun modellerle nokta koordinatlarının zamanla değişimleri (hızları) de seçilen bir referans epoğunda hesaplanabilmektedir. Nokta hızlarının belirlenmesinde dikkat edilmesi gereken önemli hususlar GNSS ölçülerini etkileyen hataların ve GNSS sinyallerinde var olduğu bilinen gürültülerin (noise) ortadan kaldırılmasıdır. GNSS ölçülerini etkileyen hatalar uygun yöntemlerle ölçü sırasında/sonrasında ortadan kaldırılabilmesine rağmen GNSS sinyallerinde var olduğu bilinen gürültülerin ise zaman serileri yardımıyla belirlenmesi ve veriden arındırılması gerekmektedir. GNSS sinyallerindeki gürültü bileşenleri veriden arındırıldıktan sonra daha gerçekçi nokta hızları hesaplanabilmektedir.
Gerçekleştirilen çalışmada, 1 / 250 000 ölçekli 9 adet paftanın kapladığı İç Anadolu bölgesi test bölgesi olarak seçilmiştir. Bu bölgede bulunan TUSAGA-Aktif istasyonlarının ham verileri 2009-2015 yılları arasında eşit aralıklı olarak (her haftadan bir gün ) temin edilmiştir. Temin edilen veriler Bernese v5.2 Bilimsel GNSS yazılı ile değerlendirilmiştir. Değerlendirme sonucunda bu istasyonların 2005.00 ölçü epoğunda koordinat ve hızları elde edilmiştir. Daha sonra her bir güne ait değerlendirme sonucu elde edilen koordinatlar zaman serileri ile incelenmiş ve CATS yazılımı ile birlikte bu istasyonların her üç koordinat bileşeni içinde gürültü analizi gerçekleştirilmiştir. Gürültü analizinin gerçekleştirilmesinde beyaz gürültü (WN), beyaz gürültü ile flicker gürültü (WN+FN) ve beyaz gürültü ile random walk gürültünün (WN+RWN) etkileri araştırılmıştır. Koordinat bileşenleri için gürültü yoğunluklarına bakıldığında ve tüm istasyonlar dikkate alındığında; kuzey bileşeninin sadece beyaz gürültü ile yüklü olmadığı, noktaların ~%59.1’inin WN+ FN ile ve ~%40.9’unun ise WN + RWN ile yüklü olduğu, doğu bileşeninin ise %4.5’ inin sadece WN ile yüklü olduğu, ~%40.9’unun WN+ FN ile ve %54.6’sının ise WN + RWN ile yüklü olduğu, düşey bileşenin sadece beyaz gürültü ile yüklü olmadığı, ~%86.4’ünün WN +FN ile, ~%13.6’ sının ise WN+ RWN ile yüklü olduğu belirlenmiştir. Benzer şekilde gürültü genlikleri incelendiğinde, WN için; kuzey bileşeninde12.92 mm – 1.25 mm, doğu bileşeninde 9.82 mm – 1.31 mm, yükseklik bileşeninde ise 9.90 mm – 3.07 mm arasında, WN+FN için; kuzey bileşeninde 11.23 mm - 1.47 mm, doğu bileşeninde 8.97 mm -2.00 mm, yükseklik bileşeninde ise 13.27 mm -4.28 mm, WN+RWN içinde; kuzey bileşeninde 16.45 mm -1.20 mm, doğu bileşeninde 15.98 mm -1.07 mm, yükseklik bileşeninde ise 9.63 mm -1.55 mm arasında değiştiği belirlenmiştir. Ortalama hataların ise; WN de; kuzey bileşeni için ±0.5053 mm - ±0.0588 mm, doğu bileşeni için, ±0.3830 mm - ±0.0612 mm, yükseklik bileşeni için, ±0.4862 mm - ±0.1585 mm, WN+FN’de; kuzey bileşeni için ±5.3900 mm- ±0.2755 mm, doğu bileşeni için, ±2.8502 mm - ±0.2154
v
mm, yükseklik bileşeni için, ±2.2937 mm - ±0.9997 mm, WN+ RWN’de ise; kuzey bileşeni için ±0.7460 mm - ±0.2721 mm, doğu bileşeni için, ±1.1385 mm - ±0.3162 mm, yükseklik bileşeni için, ±2.4496 mm - ±0.5594 mm arasında değiştiği görülmüş ve yükseklik bileşeninin diğer bileşenlerden daha yüksek ortalama hataya sahip olduğu belirlenmiştir. Gürültüden arındırılmış ve arındırılmamış hızlar arasındaki farkların X bileşeninde ±0.3 mm, Y bileşeni için -0.4 mm - 0.1 mm, Z koordinat bileşeni için ±0.2 mm arasında değiştiği görülmüştür. Ayrıca, kullanılan TUSAGA-Aktif istasyonları enlem, boylam ve elipsoidal yüksekliklere göre gruplara ayrılarak, her üç koordinat bileşeni için en uygun gürültü modelinin enlem, boylam ve elipsoidal yüksekliklerle olan ilişkileri ortaya konulmuştur. İstasyonlarda en uygun gürültü modelinin enlem, boylam ve elipsoidal yükseklikle bir ilişkisinin olmadığı sonucuna varılmıştır.
Anahtar Kelimeler: Bernese v5.2, Beyaz Gürültü, Flicker Gürültü, Gürültü, Random Walk Gürültü, Renkli Gürültü, TUSAGA-Aktif
vi
ABSTRACT
Ph. D THESIS
DETERMINATION OF VELOCITY COMPONENTS CLEARED FROM
COLOURED NOISES AT TUSAGA-ACTIVE POINTS
Sercan BÜLBÜL
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF
SELÇUK UNIVERSITY
THE DEGREE OF DOCTOR OF PHILOSOPHY
IN GEOMATICS ENGINEERING
Advisor: Prof. Dr. Cevat INAL
2018, 156 Pages
Jury
Advisor Prof. Dr Cevat INAL
Prof. Dr. Bayram TURGUT
Prof. Dr. Ekrem TUŞAT
Assoc. Prof. Dr. Ismail SANLIOGLU
Assoc. Prof. Dr. Salih ALCAY
Nowadays, point positions can be determined based on the reference points selected at a specific reference epoch with GNSS techniques. By using the point coordinates determined by this method, the changes (velocities) of the point coordinates with the appropriate models can also be calculated in a selected reference epoch. The important points to be considered in determining the point velocities are eliminating the errors affecting the GNSS measurements and the noise known to exist in GNSS signals. Although the errors affecting GNSS measurements can be eliminated by appropriate methods during / after measurement, the known noises in GNSS signals should be determined by time series and they should be removed from the data. After noise components were removed from GNSS signals, more accurate velocities can be calculated.
In the study, the Central Anatolia region, covered by 9 maps of which scales are 1/250 000 is selected test region. The RINEX data of the TNGPN-Active stations in this region were obtained equally between 2009-2015 (one day every week). The obtained data were processed using Bernese v5.2 Scientific GNSS software. At the end of the process, the coordinates and velocities of these stations were obtained at the 2005.00 reference epoch. Then, the obtained coordinates corresponding to eeach day were examined with times series and the noise analysis was performed for all coordinate components of these stations using CATS software. At noise analyses, the effects of white noise (WN), white noise +flicker noise (WN + FN) and white noise+ random walk noise (WN + RWN) were investigated. When the magnitudes of noise for all stations were examined for all coordinates components, it was determined that; the north component is not only loaded with white noise, ~ 59.1% of the points is loaded with WN+FN and ~ 40.9% is loaded with WN+RWN; 4.5% of the east component is loaded only with WN, 40.9% is loaded with WN+FN and 54.6% is loaded with WN+RWN; the up component is not only loaded with white noise, 86.4% is loaded with WN+FN and 13.6% is loaded with WN+RWN. Similarly, when the amplitudes of the noise are examined, it is seen that; the amplitudes range from 2.92 mm to 1.25 mm at north, 9.82 mm – 1.31 mm at east, 9.90 mm – 3.07 mm at up component for WN; the amplitudes are between 11.23 mm – 1.47 mm at north, 8.97 mm – 2.00 mm at east and 13.27 mm – 4.28 mm at up component for WN+FN; they range from 16.45 mm to 1.20 mm at north, 15.98 mm – 1.07 mm at east, 9.63 mm – 1.55 mm at up component for WN+RWN. When the root mean squares were examined, it is seen that; the rms errors of WN range ±0.5053 mm - ±0.0588 mm, ±0.3830 mm - ±0.0612 mm and ±0.4862 mm - ±0.1585 mm corresponding to north, east and
vii
up components, respectively. The rms errors corresponding to WN+FN are between ±5.3900 mm - ±0.2755 mm for north, ±2.8502 mm - ±0.2154 mm for east and ±2.2937 mm - ±0.9997 mm for up components. The rms errors of WN+RWN range ±0.7460 mm - ±0.2721 mm, ±1.1385 mm - ±0.3162 mm and ±2.4496 mm - ±0.5594 mm correspondign to north, east and up components, respectively. When the differences between noise-loaded velocities and noise-removed velocities are determined ±0.3 mm for X, -0.4 - 0.1 mm for Y and ±0.2 mm for Z coordinates. In addition, the using TNGPN-Active stations were divided into groups according to their latitude, longitude and ellipsoidal heights, and the relations of the most suitable noise model for all three coordinate components were investigated. According to the results, it was concluded that the most suitable noise model in the stations has no relation with latitude, longitude and ellipsoidal height.
Keywords: Bernese v5.2, Coloured Noise, CORS-Tr, Flicker Noise, Noise, Random Walk Noise, TNGPN-Active, White Noise