Fotogrametrik amaçlı kullanılan tarayıcıların radyometrik ve geometrik doğruluğunun araştırılması
191
0
0
Tam metin
(2) ÖZET. Doktora Tezi. FOTOGRAMETRİK AMAÇLI KULLANILAN TARAYICILARIN RADYOMETRİK VE GEOMETRİK DOĞRULUĞUNUN ARAŞTIRILMASI. Murat YAKAR Selçuk Üniversitesi Fen Bilimleri Enstitüsü Jeodezi Fotogrametri Anabilim Dalı Danışman : Doç. Dr. Ferruh YILDIZ 2002 , 178 Sayfa. Juri : Doç. Dr. Ferruh YILDIZ Prof. Dr. Mehmet YERCİ Prof. Dr. Sıtkı KÜLÜR Prof. Dr. Gönül TOZ Prof. Dr. Hükmü ORHAN. Digital fotogrametri , fotoğrafları digital görüntü dosyalarına çeviren tarama işlemleriyle başlar. Bu çevirme işlemini gerçekleştiren tarayıcılar fotoğraf taşıyıcısından geçen ışığı piksel denen resim elamanlarına çevirirler. Ancak analog verilerden digital veriye geçişte bazı hatalar meydana gelebilir. Bu hatalar ya geometrik bozulma ya da radyometrik olarak ortaya çıkar. Bu nedenle tarayıcıların kaliteleri digital fotogrametri de önemli rol oynar.. i.
(3) Bu çalışmada farklı özelliklere sahip çeşitli tarayıcıların test edilmesi ve birbirleriyle kıyaslanması gerçeklendirilmiştir. Öncelikli olarak hava fotoğraflarını tarayan fotogrametrik tarayıcıların hatalarını tespit etmek ve miktarlarını belirlemek hedeflenmiştir. Fotogrametrik üretimde en çok aranan özellik geometrik doğruluk olduğu için öncelikli olarak bu tarayıcıların geometrik doğruluğu incelenmiştir. Daha sonra bu tarayıcıların radyometrik çözünürlük kalitesi , gri tonlarını elde etme kaliteleri ve renk elde etme kaliteleri ayrı ayrı incelenmiştir. Ayrıca fotogrametrik tarayıcıların yanı sıra masaüstü tarayıcılarda bu çalışmaya dahil edilmiş ve yapılan testlerin sonuçları elde edilmiştir.. Anahtar Kelimeler:. Tarayıcı , Digital Görüntü , Görüntü Kalitesi , Tarayıcı Kalitesi Gemetrik Doğruluk , Renk Uzayı , Radyometrik Doğruluk , Geometrik Çözünürlük , Gri Seviyesi , Renk Dönüşümleri , MTF , Modülasyon Transfer Fonksiyonu , USAF 1951 , NBS 1010A Q60 , IT8. ii.
(4) ABSTRACT PhD Thesis. RESEARCH FOR THE RADIOMETRIC AND GEOMETRIC ACCURACY OF THE SCANNERS UTILIZED FOR PHOTOGRAMMETRIC PURPOSES. Murat YAKAR Selçuk University Graduate School of Natural and Applied Sciences Department of Geodesy and Photogrammetry Supervisor : Assoc. Prof. Dr. Ferruh YILDIZ 2002 , 178 Page. Jury : Assoc. Prof. Dr. Ferruh YILDIZ Prof. Dr. Mehmet YERCİ Prof. Dr. Sıtkı KÜLÜR Prof. Dr. Gönül TOZ Prof. Dr. Hükmü ORHAN. Digital Photogrammetry begins with scanning , which converts a photogrammetric image into a digital image file. Scanners which complies interchanging process , converts transmitted light from the photographic image into the picture elements, called as pixel. Some errors can occure when the analogue data is transmitted to the digital data. This errors appear as either geometric or radiometric deformations. For this reason quality of the scanner have a important role in Digital Photogrammetry.. iii.
(5) In this study, it was aimed to determined the sources and amountof errors for scanner used in aerial phototos.For this purpose several scanners having different properties were tested and compared to each other. Since , geometric accuracy is the most important properties in the photogrammetric production. The geometric accuracies of the scanners were investigated with presedence. Later, Radiometric resolution quality of the scanners, gray level quality and color quality were searched seperately. On the outher hand , photogrammetric scanners as well as desktop publishing scanner were included into the this study and the results of the test were also presented.. Key Words:. Scanner , Digital Image , Image Quality , Scanner Quality , Geometric Accuracy , Color Space , Radiometric Accuracy , Geometric Resolution , Gray level, Color Conversation , MTF , Modulatin Transfer Function , USAF 1951 , NBS 1010A , Q60 , IT8. iv.
(6) ÖNSÖZ Bilgisayar teknolojisindeki hızlı gelişmeler , bilgisayarları günlük hayatımızın vazgeçilmez bir parçası haline getirmiştir. Kapasitelerinin ve hızlarının artması kullanım alanlarını arttırmıştır. Uydu. ve hava. fotoğraflarının. bilgisayarla. değerlendirilip sayısal haritalarının oluşturulması , görüntü işleme , orijinal fotoğraflar oluşturma , orijinal objelerin yüksek kalitede bilgisayar sistemlerine aktarılması. ,. digital. görüntülerin. web. ortamında. kullanılması. bilgisayar. teknolojilerinin gelişmesine bağlı olarak ortaya çıkmıştır.. Teknolojik gelişmelerin yanında , uygulamaların daha doğru sonuçlar üretmesi ve sonuçların gerçeğe daha yakın olabilmesi için görüntü kalitesinin arttırılması kullanıcılar tarafından talep edilmektedir. Digital görüntü kalitesinin arttırılıp belirli bir standarda oturtulması için uluslararası alanda resmi ve özel kuruluşlar çalışmaktadır. Bu çalışmalar sonucunda tarayıcılar , kameralar , görüntüleme sistemleri , renk uzayları alanlarında standartlar oluşmaktadır.. Gerçekleştirdiğimiz bu çalışma ile farklı tarayıcılar kullanılarak digital görüntü kalitesi araştırılmıştır. Görüntü kalitesini araştırmak için standartlara uygun test parçaları kullanılmış ve bu test parçaları için uygulama yazılımı geliştirilmiştir.. Çalışmalarım sırasında moral ve yönlendirici desteğini esirgemeyen danışmanım Sayın Doç. Dr. Ferruh YILDIZ’ a , çalışmalarımın her safhasında görüşlerine başvurduğum Sayın Prof. Dr. Orhan ALTAN’ a , Tarayıcılarını kullanma imkanı sağlayan , Tapu Kadastro Genel Müdürlüğüne , Karayolları Genel Müdürlüğüne , Emi Harita’ ya , MNG Harita’ ya , Sayın İbrahim YILMAZ’ a Kodak Firmasından William Grabenstettat’ a , Gordon Petri’ ye teşekkürü borç bilirim. İÇİNDEKİLER ÖZET ...........................................................................................................................i. v.
(7) ABSTRACT......................................................................................................................................iii ÖNSÖZ ................................................................................................................................................v İÇİNDEKİLER .........................................................................................................vi I. GİRİŞ .......................................................................................................................1 II. TARAYICILAR (SCANNER’LER) ..................................................................3 2.1 Silindir (drum) Tarayıcılar.................................................................................4 2.2 Düzyataklı (Flatbed) Tarayıcılar........................................................................4 2.3 Taramanın Mekanik İşlemi................................................................................5 2.4 Renkli Tarama....................................................................................................5 III.FOTOĞRAFİK GÖRÜNTÜ ...............................................................................6 3.1 Fotoğrafın Yapısı...............................................................................................6 3.2 Yoğunluk (Density)...........................................................................................8 IV.TARAYICILAR VE DİGİTAL GÖRÜNTÜ İÇİN TEMEL KAVRAMLAR 4.1 Piksel..............................................................................................................10 4.2 Dinamik Aralık (Dynamic Range)..................................................................12 4.2.1 Bit ve Bit Miktarının Dinamik Aralıkla İlişkisi......................................12 4.3 Çözünürlük.......................................................................................................15 4.3.1 Çözünürlük Tanımları.............................................................................15 4.3.2 Görüntülerde Boyut Hesabı....................................................................17 4.4 Renk ve Algılama............................................................................................19 4.4.1 Işığın Özellikleri.....................................................................................19 4.4.2 Renk Uzayları.........................................................................................21 4.4.2.1 RGB ve CMY.............................................................................21 4.4.2.2 HSV, HLS ve HSI.......................................................................22 4.4.2.3 CIE Standardı..............................................................................25 4.4.2.3.1 CIE XYZ.....................................................................26 4.4.2.3.2 CIE Luv........................................................................27 4.4.2.3.3 CIE Lab........................................................................27 4.5. RGB Değerlerinden Gri Seviye Değerinin Hesabı.........................................28 V.TARAYICILARDA YAPILAN TESTLER ......................................................30 5.1 Geometrik Doğruluk Testi...............................................................................30 5.2 Geometrik Çözünürlük Test Yöntemi..............................................................31 5.2.1 Modülasyon Transfer Fonksiyonu..........................................................31 5.2.1.1 Modülasyon Transfer Fonksiyonunun Yorumlanması...............34 5.3 Radyometrik Çözünürlük Test Yöntemi..........................................................35 5.4 Renk Doğruluk Testi .......................................................................................36. vi.
(8) VI. GEOMETRİK DOĞRULUK TESTİ ..............................................................40 6.1. Geometrik Doğruluk Testinin Amacı.............................................................40 6.2. Geometrik Doğruluk Test Plakası...................................................................40 6.3 Referans Grid Koordinatlarının Ölçümü.........................................................41 6.3.1 Dıp-6 Koordinat Ölçme Aletinin Özellikleri.........................................41 6.4 Test Plakasının Taranması...............................................................................43 6.5 Digital Görüntünün Ölçümü ...........................................................................43 6.5.1 Scangrıd Programı..................................................................................45 6.6 Sonuçların Analizi...........................................................................................50 VII. GEOMETRİK ÇÖZÜNÜRLÜK ...................................................................66 7.1. Geometrik Çözünürlük Testinin Amacı..........................................................66 7.2. Geometrik Çözünürlük Test Plakası...............................................................66 7.2.1 USAF 1951 Test Plakası.......................................................................66 7.2.2 NBS 1010A Mikroskopik Çözünürlük Test Plakası.............................70 7.3. Geometrik Çözünürlük Test Plakasının Taranması........................................72 7.4. Geometrik Test Plakası Görüntüsünün Ölçümü.............................................72 7.4.1 Scan MTF Programının Kullanılması...................................................72 7.4.1.1 Usaf 1951 Test Plakası Ölçüm Programı..................................73 7.4.1.2 NBS 1010A Mikroskopik Çözünürlük Test Plakası Programı.75 7.5 Geometrik Çözünürlük Testinin Ölçümü ve Sonuçları..................................77 VIII. RADYOMETRİK DOĞRULUK ..................................................................81 8.1. Radyometrik Doğruluk Testinin Amacı.........................................................81 8.2. Radyometrik Doğruluk Test Plakası..............................................................81 8.3. Radyometrik Doğruluk Test Plakasının Taranması........................................82 8.4 Radyometrik Doğruluk Test Plakasının Ölçümü.............................................82 8.4.1. Yoğunluk (Intensity Değeri ) ..............................................................83 8.5. Grayscale Programının Çalışması...................................................................84 8.6 Ölçülerin Sonuçları..........................................................................................87 8.6.1 Yoğunluk ...............................................................................................87 8.6.2 Gürültü (noise) ve Kesit Yoğunluğu.....................................................95 IX. RENK DOĞRULUK TESTİ ..........................................................................108 9.1. Renk Doğruluk Testinin Amacı....................................................................108 9.2. Renk Doğruluğu Test Plakası.......................................................................108 9.2.1 Kodak Q-60 Renk Kalibrasyon Kartları..............................................109 9.3. Renk Doğruluğu Test Yöntemi.....................................................................112 9.3.1. PixelColor Programı...........................................................................112 9.3.2 RGB – LAB Dönüşümü .....................................................................114 9.4 Renk Testi Sonuçlarının Analizi....................................................................116. vii.
(9) X. SONUÇ VE ÖNERİLER ..................................................................................127. KAYNAKLAR .......................................................................................................132. EKLER ...................................................................................................................136. viii.
(10) 1. I.GİRİŞ. Bilgisayar teknolojisinde meydana gelen gelişmeler digital görüntüye olan talebi arttırmıştır. Digital görüntülerin elde edilmesi ise farklı yöntemlerle olmaktadır. Birinci yöntemde digital kameralarda ve digital videolarda olduğu gibi direk obje uzayından digital görüntüler elde edilir. İkinci yöntemde daha önce elde edilmiş analog formattaki görüntüler tarayıcı denen aletlerle digital formata çevrilir. Teknolojik gelişmeler fotogrametrik sistemlerde de , son derece etkili olmuş günümüzde tamamen digital görüntüleri kullanan sistemler haline gelmiştir. Fotogrametrik sistemlerde direk olarak digital görüntüleri elde eden digital kameraların geliştirilmiş olmasına rağmen şu an en yaygın olarak kullanılan digital görüntü elde etmede ikinci yöntem kullanılır. Tarayıcıların kullanımının daha uzun sürede bu cazibesini koruyacağı bir gerçektir. Sebebi ise digital kameraların maliyetinin şu an istenen düzeyde olmamasından kaynaklanmaktadır. Fotogrametrik tarayıcının maliyeti 50.000 dolarla 150.000 dolar arasında değişirken digital kameralar söz konusu olduğunda milyon dolarlardan söz edilmektedir. Bu nedenle tarayıcıların daha uzun süre bu sistemlerde yerini koruması bir zorunluluktur.. Digital fotogrametrik sistemlerde hata kaynaklarından bahsedilirken ilk olarak tarayıcılardan söz edilir. Fotogrametrik sistemlerdeki beklenen, arzu edilen görüntü kalitesi diğer. digital görüntülere ihtiyacı duyanlara nazaran oldukça. yüksektir. Bu sistemlerde en başta istenen ise geometrik doğruluktur. Tarayıcının geometrik doğruluğun yüksek olması fotogrametrik olarak üretilen haritanın doğruluğunu direk olarak etkilemektedir. Ancak son yıllarda coğrafi bilgi sistemlerine talebin artması ve coğrafi bilgi sistemlerinde yoğun olarak Ortofoto haritaların kullanılması ise tarayıcılarda beklenen doğrulukta, yeni beklentiler meydana getirmiştir. Geometrik doğruluğun yanı sıra radyometrik doğrulukta artık bu sistemlerde bir zorunluluk haline gelmiştir. Bu nedenle bu çalışmada öncelikli olarak fotogrametrik tarayıcıların test yöntemleri araştırılmıştır..
(11) 2. Tarayıcılarda yapılan araştırma geometrik doğruluk ve radyometrik doğruluk olmak üzere farklı olarak incelenmiştir. Ancak radyometrik doğruluk araştırmasında üç ayrı çalışma yapılmıştır. Bunlardan ilkinde radyometrik çözünürlük üzerine bir çalışma yapılmış. Daha sonra ise hem renk hem de siyah-beyaz, gri seviyeyi elde etmede tarayıcıların kalite araştırması yapılmıştır. Literatürde bu konuda çalışma yapanlardan bazıları bu testleri görsel olarak gerçekleştirmiştir. Örneğin Jacobson (1996) yaptığı çalışmada geometrik doğrulukta ölçümleri manuel olarak yapmış ve değerlendirmiştir. Baltsavias (1994) ise radyometrik çözünürlüğü değerlendirirken sonucları görsel değerlendirmeye göre vermiştir.. Doğrudan fotogrametriyle ilgilenenlerin yapmış olduğu çalışmalarda renk doğruluğu üzerine çok az bir çalışma yaptıkları görülmektedir. Yapılan çalışmalar ise yetersizdir. Renk konusu üzerinde Otto Kolb’ün (1996) çalışmaları olmuştur.. Bu çalışmada yukarıda bahsedilen tüm testler görsel değil matematik esaslara dayandırılmıştır. Bu esaslara göre de Delphi programlama dilinde yazılım geliştirilmiştir. Testlerde öncelikli olarak fotogrametrik tarayıcılar üzerinde çalışılmış ancak Prof. Dr. Orhan Altan’ın tavsiyesi üzerine masaüstü tarayıcılarda çalışmaya dahil edilerek uygulama zenginleştirilmiştir. Aynı zamanda A3 tarayıcıların fotogrametrik amaçlı kullanılıp kullanılamaması yorumunu yapabilmek için matematiksel sonuçları elde edilmiştir. Bu tarayıcıların fotogrametrik tarayıcılara göre geometrik ve radyometrik doğrulukları hakkında elde edilen bilgiler verilmiştir..
(12) 3. II- TARAYICILAR (SCANNER’LER). Tarayıcı bir objenin görüntüsünü capture eden ve görüntüyü bilgisayar işlemleri için sayısal ışık-yoğunluk haritasına dönüştüren bir araçtır. Objeler yazılı bir doküman, fotoğraf veya slayt olabilir. Tarayıcılar sürücü yazılımlarına, kendisini yöneten uygulama programlarına ve donanıma sahiptirler. Taranmış görüntünün en küçük elementi piksedir. Görüntü, pikselerin iki boyutlu haritası şeklindedir. Bu haritada her bir piksel, objenin geçirgenliğine (transmittance) ya da yansıtıcılığına (reflectance) uygun yoğunluk (intensity) ölçümlerini tutar.. Tarayıcılar seçileceği zaman tüm ihtiyaçların göz önünde bulundurulması gerekir. Bir tarayıcı yalnızca taranacak objenin karakteristikleri bakımından değil aynı zamanda tarama işlemi sonucunda elde edilmiş görüntünün kullanım alanına bağlı olarak seçilmelidir. Sayısal görüntüler masa üstü yayıncılık, optik karakter tanıma, kopyalama, elektronik bilgi dağıtımı, internet gibi alanlarda olduğu gibi fotogrametrik. iş istasyonlarında da kullanılmaktadır. Fotogrametrik amaçlı. kullanılacak tarayıcıların kaliteden beklediği oran yukarıda sayılan alanların çok üzerindedir.Baltsavias (1994) tarayıcıları şu şekilde sınıflandırmıştır. Fotogrametrik tarayıcılar Masaüstü yayıncılık tarayıcıları Mikrodensitometreler Büyük doküman tarayıcıları Diğer tarayıcılar Slide tarayıcılar Text doküman tarayıcılar El tarayıcıları Röntgen görüntü tarayıcıları vd. Ayrıca tarayıcıları tarama şekline göre Silindir (drum) tarayıcılar ve düzyataklı tarayıcılar olmak üzere iki guruba ayırmıştır..
(13) 4. 2.1 Silindir (drum) Tarayıcılar. Silindir (drum) tarayıcılar ince detaylı ve düzgün renk geçişli oldukça keskin görüntüler üretir. Aslında silindir (drum). tarayıcılar. insan gözünün bile. algılayamayacağı verileri kaydedebilir. Bu yüzden reklam ve yayıncılık işlerinde yoğun kullanılır. Ancak fotogrametrik çalışmalar için uygun değildir.. 2.2 Düzyataklı (Flatbed) Tarayıcılar. Düzyataklı (flatbed) tarayıcılar adında da anlaşılacağı gibi taraması yapılacak orijinal resmin yerleştirilmesi için düz bir tarama zemine sahiptir.. Bu düz zemin silindir (drum) tarayıcılarda yoktur. Düz bir zemine sahip olmasından dolayı silindir (drum) tarayıcılarda kullanılamayan cam gibi sert maddelerinde taranması mümkün olmaktadır. Algılayıcı (sensör) tarayıcının içinde bulunur ve genellikle bir satır veya alan algılayıcı şeklindedir. Orijinal resim ışıklandırılır ve algılayıcı üzerinde ayna veya merceklerle görüntü algılayıcı(sensör) üzerine iz düşürülür. Ya tarayıcı tablası yada dedektör tarama için hareket eder ve gelen sinyaller sabit aralıklarla kaydedilir. Düz yataklı tarayıcıların en yaygını masa üstü yayıncılık tarayıcılarıdır. Bu tarayıcılara İngilizce “Desktop Publishing Scanners” kelimelerinin baş harflerinden dolayı DTP tarayıcılar denir. Bir DTP tarayıcısında bir yönde ki geometrik çözünürlük ışınların ve optik donanımın yapısına ve diğer yöndeki ise merceklere algılayıcının ve tarama masasının hareket ettirdiği aralığın boyutuna bağlıdır. DTP tarayıcılar genel olarak kullanılmasına rağmen birkaç çeşidi vardır. Bunlardan bazıları A4 bazıları ise A3 boyutundadır. (Gilliusson , 1997) Fiyat ise tarayıcının özelliği ve tarama hızına göre çeşitlilik gösterir.. Fiyatta fark A4 den A3 (orijinal resim boyutu) tarayıcılara geçildiğinde daha fazla olur. Çünkü A3 tarayıcılar daha geniş sensör dizileri ve daha karmaşık yapıya sahip olmalarından dolayı bu fiyat farkı olmaktadır. Şeffaf malzemeleri taramak için tarayıcılarda opsiyonel olarak ekstra tarama adaptörü gerektirir ki buda fiyatı arttıran unsurdur. Fotogrametrik tarayıcılar da düz yataklı tarayıcılar sınıfına girer ve ekstra tarama ünitelerinden ve sınırlı kulanan olmasından dolayı fiyatları kıyaslanamayacak kadar fazladır..
(14) 5. 2.3 Taramanın Mekanik İşlemi. Taramanın mekanik işlemi şöyle tanımlanabilir. Bir florasan lamba fotoğrafik görüntüyü aydınlatır ki bu fotoğrafik görüntü cam taşıyıcı üzerine yerleştirilir. Bu taşıyıcı tarayıcısı tabakası olarak isimlendirilir. Taranan fotoğrafa orijinal denir. Ya geçirilen veya yansıyan ışın (kullanılan orijinal yansıtıcı veya geçirgen olup olmamasına bağlı olarak) optik sistem vasıtası ile alıcı (dedektör) üzerine iz düşürülür. Işık dedektöre çarptığı zaman elektiriksel bir yük oluşur. Bu yükün boyutu gelen ışının miktarına bağlıdır. Yük ardışık olarak dedektöre kaydedilir ve sinyal voltajına çevrilir. Sinyal A/D (analog/digital) çeviricileriyle digital sayı formatına dönüştürülür. Tarayıcı bilgisayara bağlanırsa digital sinyallar alınır. Tarayıcı ve kullanıcı arasındaki iletişim ana bilgisayardaki tarayıcı yönetim proğramı ile sağlanır.. 2.4 Renkli Tarama. Renkli bir görüntü tarandığında orijinalin kırmızı yeşil ve mavi kanalları ayrıştırılmalıdır. Tipik CCD dedektör bütün görünür ve yakın infraret ışınlara duyarlıdır. Renk ayrıştırma filitrelerle yapılır. Renk ayrıştırmada üç yöntem vardır. Birinci yöntemde sensördeki farklı filitrelerle orijinal üç kez taranmaktadır. Bu tip tarayıcılar “three pass-üç geçişli” tarayıcı olarak adlandırılırlar. Diğer tipler de üç sensör vardır ve sensörlerde sabit filtreler vardır. Böylece tarama tek geçişle yapılır ve aynı zamanda taramada zaman kazancı olur. Bu tip tarayıcılar “single pass-tek geçişli” tarayıcılar olarak adlandırılırlar. Üçüncü tipler ise. yaygın olmamasına. rağmen orijinalı aydınlatırken flaş ışığını kullanmaktadır. Bunlarda. tek geçiş. yeterlidir ve sadece bir sensöre ihtiyaç duyulur. Bu metotta aydınlatma ve sensör sinyalinin okunmasını senkronize olmalıdır ki bunu pratikte uygulamak zordur.Üç farklı yerden bilgi toplarken (single pass-tek geçişli tarayıcılar da olduğu gibi) veya farklı yerlerde aynı zamanda (three pass-üç geçişli tarayıcılarda olduğu gibi) renk kanalları arasında geometrik bozukluk riski vardır..
(15) 6. III-FOTOĞRAFİK GÖRÜNTÜ. Hava fotoğrafları arazi topoğrafyası hakkında bilgilerin depolanmasında iyi bir araçtır. En büyük avantajı çok fazla bilgi içermesidir. Dezavantajı ise hiçbir digital işlemin yapılamamasıdır. Eğer fotoğraf ile digital bir işlem yapılacaksa fotoğraf önce digital formata çevrilmeli,yani tarama işlemi gerçekleştirilmelidir. Fotoğrafın taranmasında ise bazı özellikleri digital görüntünün kalitesini etkiler. Bu özelliklerin bazılarından bu bölümde bahsedilecektir.. 3.1 Fotoğrafın Yapısı. Pozlanmamış fotoğraf altlığı çok büyük miktarda gümüş parçacıklardan oluşur. Bu gümüş parçacıkları jelatinle kaplanmış durumdadır. Jelatin ve gümüş parçacıkları filmin emülsiyon kısmını oluştururlar. Emülsiyon ışığa duyarlı tabakadır. Fotoğrafik oluşumda jelatin kimyasal reaksiyona karışmaz. (Yerci,1990). Pozlama emülsiyonun jelatini içindeki ışığa duyarlı gümüş parçacıkları ile latent (gizli) görüntüyü meydana getirir. Developman işleri ile bu gizli görüntü görünür hale getirilir (Karl Kraus,1992). Kalan gümüş parçacıkları film üzerinden yıkanarak atılır. Negatif fotoğrafik görüntü böylece elde edilmiş olur. Negatif görüntü transparan bir altlık üzerine pozlanırsa dia pozitif elde edilir.. Emülsiyonon kaplandığı taşıyıcı altlık olarak saydam plastikler (film) veya kağıt (baskı) kullanılır.(şekil 3.1) Hava fotogrametrisinde kullanılan plastik altlıklı rulo filimler aşırı derecede ısı ve nem farklılıklarına karşı kolay boyut değiştirmeyen bir yapısı vardır..
(16) 7. Şekil 3.1 Siyah Beyaz filmin yapısı. Siyah-Beyaz hava fotoğrafları uzun süredir hava fotoğrafçılığının standart filmi olma özelliğini korumakla birlikte şu anda birçok fotogrametri uygulamalarında renkli filimler kullanılmaktadır.Renkli bir filmin yapısı ise şekil 3.2 de verilmiştir.Filmin en üst tabakası mavi ışığa ikinci tabaka yeşile, üçüncü tabaka ise kırmızıya duyarlıdır. Gerçekte ikinci ve üçüncü tabakalar aynı zamanda mavi ışığa duyarlı olmasına karşın birinci tabakadan sonra yerleştirilen sarı filitre katmanı mavi enerjinin diğer tabakalara geçmesini önler.sarı filtre banyo işlemi sırasında eridiğinden görüntü üzerinde bir etkisi yoktur.Taşıyıcı tabaka ise ışık geçirgenliğine sahip saydam plastik yapıdadır.. Şekil 3.2 Renkli filmin Yapısı.
(17) 8. 3.2 Yoğunluk (Density). Filmlere kaydedilen ışık miktarı yoğunluk olarak ifade edilir ve İngilizce “Density-yoğunluk” kelimesinin ilk harfi olan D ile ifade edilir. Yoğunluk , densitometre denen aletlerle ölçülür. Densitometreler mikro densitometre ve makro densitometre olmak üzere ikiye ayrılır. Makro densitometrede ölçülen alanın çapı 1 mm iken mikro densitometrelerde yaklaşık 10 mikron çapındaki bir alanda ölçüm yapılabilir.. Densitometre sürekli değişen, üretilen 0 ışık miktarını üretir ve filmden geçen ışık miktarını ölçer.. T. Bu oranın tersi. oranına geçirgenlik (Transparency-T) 0. 0 / ise opaklık (opacıty-O)olarak adlandırılır. Opaklığın. logaritması ise yoğunluğu verir.. D log. 1 Log O T. Yoğunluğun iki olması demek , film üzerine düşürülen ışık miktarının 1/100’ü geçirilir. 99/100’ü ise absorbe edilir. D=1 ise gelen ışık miktarının 1/10’u geçirilir. 9/10’u ise absorbe edilir. D=0 olması demek ışık miktarının tamamının geçirildiği anlamına gelir. (Kraus 1992 ). Yoğunluk 0 ile 4 arasında değerler alır. Yukarıda açıklandığı gibi 0 tam beyazı 4 ise tam siyahı ifade eder. Yoğunluk Richter ölçeğinde olduğu gibi logaritmik olarak ölçüldüğü için 3.0 D ’nin yoğunluğu 2.0’dan 10 kat daha büyüktür.(Fulton,1997).
(18) 9. Bir filmin en açık ve en koyu ton miktarı Dmin ve Dmax olarak isimlendirilir. Filmin tüm tonal değeri bunların farkıyla hesaplanır. Örneğin Dmax =3.3 ve Dmin =0.3 ise yoğunluk. D Dmax Dmin 3.3 0.3 3D dir. Kağıt baskılarda bu değer 2D’den az iken negatiflerin yoğunluğu yaklaşık 3.D dir. (Blatner 1998).
(19) 10. IV-TARAYICILAR VE DİGİTAL GÖRÜNTÜ İÇİN TEMEL KAVRAMLAR. 4.1 Piksel. Şekil 4.1 Piksel. Yukarıdaki görüntü Photoimpact programına ait bir butondur. Şekil bir grafik görüntüdür ve boyutu 32*32 dir. Bunu 12 kat büyütürsek görüntüdeki her bir karecik görülebilir.Orijinal görüntüdeki her bir kare piksel olarak adlandırılır.Piksel bir bilgisayar terimi olup “picture element” ’in kısaltılmasından meydana gelmiştir. Piksel bilgisayarda ifade edilebilen en küçük resim elemanıdır.Tüm görüntü bu piksellerin dama tahtasındaki kareler gibi yan yana gelmesiyle oluşur.. Pikseller siyah beyaz görüntüde (8 bitlik bir ifadede) 0-255 arasında gri tonlarını alır. Görüntüde piksel değerinin 0 olması siyahı 1 olması ise beyazı ifade eder.24 bit gösterimde ise 3 adet ana renkler için (kırmızı,yeşil,mavi) depolama alanı vardır.Her bir renk değeri de 0-255 arasında ton farklılığıyla değer alır.Diğer renk kombinasyonlarının bir araya gelmesiyle de sonuç renk ortaya çıkar..
(20) 11. Örneğin; (0,0,0). Siyah. (255,255,255). Beyaz. (255,255,0). Sarı. (255,255,0) örneğinde Yeşil=255 Kırmızı=255 ve Mavi=0 değerini almıştır. Bir piksel üzerinde bu kombinasyonun sonucunda oluşan renk ise sarı olmaktadır. Piksellerin diğer renkleri de bu üç ana rengin almış olduğu değerlerin yani tonlarının karışımı ile oluşur.. Yukarıda bahsedilen görüntünün matematiksel gösteriminde ise digital görüntü x ve y’ ye bağımlı g(x,y) ’ nin sürekli bir fonksiyonudur ve tam sayılardan oluşan bir matristir. Formül 4.1 matris digital görüntünün matematiksel ifadesini göstermektedir.. g (0,1) ......... g (0, k 1) g (0,0) g (1,0) g (1,1) ......... g (1, k 1) g ( x, y ) : : : : : : g ( s 1,0) g ( s 1,1) .......g ( s 1, k 1). (4.1). Burada ; x,0,1.....s-1. satır. y,0,1.....k-1. sütün. s. Maksimum satır sayısı. k. Maksimum kolon sayısı. g(x,y)= {0,1......max}. gri seviyesi. Renkli görüntüler üç ayrı kanalla ifade edildiğinden yukarıdaki digital görüntünün renkli resimler için matematiksel ifadesi gösterimi aşağıdaki gibidir (Schenk 1999).. G={g1(x,y),g2(x,y),g3(x,y)}. (4.2). ,.
(21) 12. 4.2 Dinamik Aralık (Dynamic Range). Dinamik aralık resimdeki en açık ve en koyu detaylarının ölçümüdür. Dinamik aralık tarayıcının en açıktan en koyuya kadar ne kadarlık yoğunluğu ayırt edebilme. yeteneğinin. limitlerini tanımlar. (Grotta,1998).. 100/1. ifadesi. yoğunluğunun 2 , 1000/1 ifadesi ise yoğunluğun 3 olması anlamına gelir. Tarayıcı tarafından yoğunluğun uç noktasındaki elde edebildikleri değeler Dmax ve Dmin olarak adlandırılır. Şayet tarayıcının Dmin değeri 0.1 ve Dmax değeride 3.2 ise Dinamik aralık (Dynamic Range) 3.1 demektir. Tarayıcının dinamik aralığı büyüdükçe görüntünün (fotoğrafın) koyu bölgelerinde detayı daha fazla gösterebilme yeteneği artar . 24 bit tarayıcılarda dinamik aralık 2.5 , 30 bit tarayıcılarda 3.0 ve 36 bit tarayıcılarda 3.4 civarındadır. Sadece Silindir (drum) tarayıcılarda 4.0 değerine yaklaşılabilir. Bu tür tarayıcılarda algılayıcı olarak “Photo Multıplıer Tubes –PMT” kullanılır ve oldukça pahalıdır ( Fulton,1997 ). Tarayıcıların bir kısmının dinamik aralığı yüksek iken diğerleri küçük olabilir. Dinamik aralık yukarıda da ifade edildiği gibi bit sayısı ile doğru orantılıdır.. 4.2.1 Bit ve Bit Miktarının Dinamik Aralıkla İlişkisi. Bilgisayarda bilgi toplamak için ikili sayı sistemi kullanılır. İkili sayı sisteminde sadece iki rakam vardır, 0 ve 1. Bütün sayılar ikili sistemde 0 ve 1 değerleri ile ifade edilir. Bilgisayar dilinde bir rakamı ifade etmek için 8 digitlik (bit) bir yer kullanılır. Örneğin 255’in 8 bitlik 2’li sistemde gösterimi 11111111 şeklinde 0’ın gösterimi ise 00000000 şeklindedir. 0 ile 255 arasındaki diğer rakamlar bu 8 hane içinde 0 ve 1’in kombinasyonları ile ifade edilir.. 8 bitlik tarayıcılar 0-255 arasında (gri seviyede) veri elde edebilir. 24 bitlik tarayıcılar ise her renk için (kırmızı,mavi,yeşil) – 0 ile 255 arasında değer kullanarak 16.77 milyon renk elde edebilir. Örneğin beyaz rengin 24 bitte gösterimi şöyledir.. (11111111,11111111,11111111).
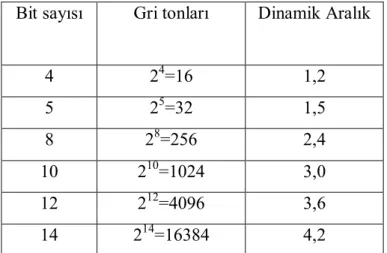
(22) 13. siyah ise ;. (00000000,00000000,00000000). 16.77 milyon renk yine buradaki 3 ayrı kanalın 0 ve 1 den oluşan kombinasyonları ile elde edilir.. Bilgisayarda grinin tonları 8 bit ile 0-255 arasında ifade edilir. Ancak renkleri gösterebilmek için 24 bit’e ihtiyaç duyulur. 3*8 bitlik depolama alanında ana renkler 0-255 arasında değer alır. Her bir renk kombinasyonlarının birleşimi ile de sonuç renk elde edebilir. 30 bit tarayıcılarda ise her bir ana renk için 10 bitlik bir veri kullanılır. 256 değeri 28 den elde edilmektedir. Burada her bir renk kanalı 0-255 arasında değer alırken 30 bit tarayıcıda bir ana renge karşılık gelen değer 210=1024 olur. Tarayıcıda ana renkler 8 bitte 256 farklı tonda ifade edilirken 10 bitte 1024 farklı tonda ifade edilebilmektedir.Bu değerler bit derinliği (bit depth) olarak isimlendirilir. Dolayısı ile 30 bit tarayıcıların renk kalitesi,24 bitlik tarayıcılara göre daha gerçeğe yakın olmaktadır. 4 kat fazla sayılarla rengin ifade edilmesi dinamik aralığı da teorik olarak arttırmaktadır. Maksimum teorik dinamik aralık bit sayısına göre aşağıdaki formül ile hesaplanır . Formüldeki N bit sayısını göstermektedir.. 1 DinamikAralik log N 2 1. (4.3). Bu eşitlik pratik olarak görüntüleme sırasında oluşan negatif etkileri dikkate almadan, teorik olarak hesaplanır. Aşağıdaki tablo dinamik alan ve yukarıdaki eşitliğe göre tamamlanmış dosyadaki bitlerin sayısının uygunluğunu göstermektedir (Williams,2000). (Tablo 4.1).
(23) 14. Tablo 4.1 Bit sayısı ve teorik dinamik aralık. Bit sayısı. Gri tonları. Dinamik Aralık. 4. 24=16. 1,2. 5. 5. 2 =32. 1,5. 8. 28=256. 2,4. 10. 210=1024. 3,0. 12. 212=4096. 3,6. 14. 214=16384. 4,2. Tablo 4.1 den de anlaşıldığı gibi. 24 bit tarayıcının teorik dinamik aralığı 2.4 30 bit tarayıcının teorik dinamik aralığı 3.0, 36 bit tarayıcının teorik dinamik aralığı 3.6. Ancak bu değerler yukarıda da bahsedildiği gibi teorik değerlerdir. Gerçekte elektronik araçlardaki bazı eksikliklerden dolayı bu değerler elde edilemez. Bu değerlere yaklaşabilmek tarayıcılarda kullanılan CCD kaliteleri ile ilgilidir. Yukarıdaki değerler CCD ’lerin 0 gürültü (noise) (gürültü) görüntü elde etmesi halinde geçerlidir. Ancak bu pratikte imkansızdır.. Tarayıcılar kıyaslanırken 30 bit tarayıcı 24 bit tarayıcıya göre elbette daha iyidir. Ancak normal bir web tasarımı için veya aile fotoğrafını tarayıcıdan bilgisayar ortamına aktaran bir kişi için bu özellik vazgeçilemeyecek bir üstünlük değildir. 3036 bit dinamik aralıklı tarayıcıların üstünlüğü ancak şeffaf filmlerin taranmasında çok büyük önem kazanmaktadır. Dolayısı ile bit miktarı ve dinamik aralık fotogrametrik tarayıcılarda şeffaf filmler kullanıldığından göz ardı edilmemesi gereken önemli bir özelliktir. Piyasadaki slide tarayıcıların hemen hemen hepsi 30-.
(24) 15. 36 bittir. Çünkü slide-yada filmin dinamik aralığı 3,5 civarındadır. 3,5’lik dinamik aralığa ancak teorik olarak 36 bitlik bir tarayıcı ile ulaşılabilir.. 4.3 Çözünürlük. Yukarıda da bahsedildiği gibi piksel kare şeklinde olan görüntünün en küçük birimidir. Digital görüntüler yan yana gelen pikseller topluluğundan oluşmaktadır. Digital görüntü, görüntünün eninde ve boyunda bulunan piksel sayısı ile tanımlanır. Tek bir piksel 1*1 mm, 1*1 cm hatta 3*2 m bile olabilir. Aksi belirtilmedikçe piksellerin en ve boy oranı eşittir. Çözünürlük ise boyut tanımlamalarında ek olarak gereken bir kavram. Kendi başlarına boyut sahibi olmayan piksellere çoğu zaman bir boyut değeri tanımlamak gereklidir. Bu şekilde piksellerin boyutu belirlendiğinde uzunluk biriminde kaç piksel bulunacağı da belirlenmiş olur. Örneğin bir pikselin boyutu 1 mm olarak tanımlanmışsa her santimetrede 10 piksel bulunacaktır. Yani çözünürlük belli bir birimdeki piksel sayısını gösterir. Tarayıcı katalogları incelendiğinde optik ve yazılım çözünürlüğü olmak üzere iki çözünürlük vardır. Gerçek çözünürlük optik çözünürlüktür.. 4.3.1 Çözünürlük Tanımları. Çözünürlük. uzunluk. biriminde. birbirinden. ayırdedilebilen. nokta. sayısıdır.Digital görüntülerle ilgili yayınlar incelenirken PPC, PPI, DPC, DPI, LPI, SPC, SPI değerleri sık sık görülebilir. Bunların anlamını bilmek zorunda olmayabiliriz. fakat. bunların. anlamlarını. bilmek. işi. kolaylaştıracağından. açıklanmasında yarar vardır.Çözünürlük hesaplarında uzunluk birimi olarak inch veya santimetre kullanılır. Bir Inch = 25.4 mm veya 2.54 cm dir.. PPC, PPI: Pixel Per. (cm). Inch: Kullanabileceğiniz en iyi birimdir.. Genellikle DPI ile karışır ancak ikisi farklı birimlerdir. Piksels / (centimeter) inch, bir (santimetreye) inch'e düşen piksel sayısıdır. Görüntüde birim olarak piksel / inch veya piksel / cm kullanılması yaygındır.Digital görüntülerinin hepsinin temelinde görüntünün parçalanamaz birimi olan piksel yatmaktadır. Bu pikseller yan yana.
(25) 16. geldikçe ana görüntü oluşmaktadır. Görüntü boyutu bu nedenle bilgisayar için hep piksel olarak hesaplanmaktadır. Eninde 2, boyunda 3 piksel olan bir görüntü de toplam 2*3=6 piksel vardır. En ve boy oranları arttıkça piksel sayısı ve dosya boyutu kenarların çarpanı kadar artmaktadır. Piksellerin kendi başlarına bağımsız enleri ve boyları yoktur. Örneğin 2*3 piksel boyutundaki bir görüntü 2*3 cm olarak basılabiliyorken, 2*3 metre veya 2*3 mm olarak da basılabilir. Her durumda uzunluk birimine düşen piksel sayısı değişmektedir. Örneğin 1 cm başına 2 piksel düşüyorsa görüntü çözünürlüğü 2 piksel / santimetredir. Bu değer ppc veya "pixel per centimeter" olarak ifade edilmektedir. 1mm başına iki piksel düşen ikinci örnekte ise çözünürlük yine santimetre olarak hesaplanmaktadır. Tanımda birim olarak santimetreyi kullandığımızdan görüntü ebadı ne olursa olsun önce santimetre başına düşen piksel sayısını hesaplamamız gerekir. 1mm'de 2 piksel varsa (1cm) 10mm'de kaç piksel olacak gibi basit bir hesapla : Çözünürlük= 20 ppc veya santimetre başına 20 piksel olarak hesaplanabilir.. SPC, SPI: Samples per inch, Örnekleme / Santimetre, Örnek / Inch: Bir santimetreden alınan gerçek örneklem sayısıdır. Bu birim tarayıcı cihazlarının taranan cisimden örnekleme aralığını gösterir. Maksimum örnekleme aralığı tarayıcı cihazının üretimi sırasında belirlenmiştir. Ancak bazı tarayıcı üreticileri örnekleme değerlerini daha yüksekmiş gibi gösterebilmektedirler. Kullanıcı onlardan yüksek değerlerde tarama yapmasını istediğinde cihaz tarayabildiği en yüksek değerde görüntüyü tarayıp, görüntü işleme programına taradığından daha yüksek bir değerde sunabilmektedir. Bu nedenle tarayıcı satın alırken üzerinde yazan çözünürlük değerinin yanı sıra "Optik Çözünürlük" değerini de dikkate almakta fayda var.. LPI : Lines Per Inch, Çizgi/Inch veya bir inch'e düşen çizgi sayısı. Baskı teknolojisinde kullanılan tarama dokusu (tram) bir birine paralel çizgiler yardımı ile CMYK adı verilen Turkuaz, Majenta, Sarı ve Siyah mürekkeplerini kağıda aktarır. Bu çizgilerin yoğunluğu ve aralığı baskı kalitesini belirler. DPC, DPI: Dots Per Inch, Nokta Vuruşu/Santimetre, Nokta Vuruşu/Inch, yazıcı çıktısının birimi. Bildiğimiz yazıcıların çoğu baskılarını nokta vuruşları.
(26) 17. yardımı ile yaparlar. Yan yana konan CMYK adı verilen Turkuaz, Majenta, Sarı ve Siyah küçük mürekkep noktacıkları bildiğimiz renkleri oluşturur. Yazıcının kullanabileceği en yüksek nokta yoğunluğu üretim sırasında belirlenmiştir. Genellikle satılan yazıcıların çoğu 300DPI (120DPC), 600DPI (240DPC) , ve 1200DPI (470 DPC) olarak üretilmektedirler.. Baskı cihazlarının çözünürlüğü ise dpi (dot per inch) yani bir Inch başına vurduğu nokta sayısı ile ölçülür. Sonuç olarak tarayıcılarda çözünürlük söz konusu olduğunda optik çözünürlüğü, yazılım yardımıyla kazanılan tarayıcının maksimum (interpolated) çözünürlüğünden ayırmak gereklidir. Optik çözünürlük, tarayıcının gerçek gücünü gösterir.Başka bir deyişle, optik çözünürlük tarayıcı içindeki optik aksamın görüntü yakalama duyarlığıdır. 300*600 dpi çözünürlükte bir tarayıcının optik çözünürlüğü 300 dpi’dır (yatay çözünürlük). İkinci rakam, 600 dpi (düşey çözünürlük) ise sadece interpolasyon yoluyla yükseltilmiş çözünürlükte bir tarayıcı olduğunu. gösterir. Maksimum (interpolated) çözünürlük ise yazılım yardımıyla. artırılan çözünürlüktür. Maksimum çözünürlük bazı taramalarda etkili olduğu halde, optik çözünürlüğü yüksek. bir tarayıcının yerine hiçbir şekilde geçemez: Yani,. tarayıcıcının optik çözünürlüğü düşükse, ne yapılırsa yapılsın belli bir kalitenin üzerine çıkılamaz.. Yüksek çözünürlükte tarama yapmak daha uzun zamanı, daha çok belleği ve diskte daha büyük alanı gerektirir. Bu yüzden çözünürlüğü belirlerken ne çeşit bir tarama yapılacağı göz önünde bulundurulmalıdır.. 4.3.2 Görüntülerde Boyut Hesabı. Bir görüntünün bilgisayar ortamında işgal edeceği hafıza miktarı(boyutu) orijinal görüntünün boyutundan hesaplanabilir..
(27) 18. Siyah beyaz resimlerde;. İB=SR*Dz. (4.4). Renkli resimlerde görüntü boyutu;. İB=SR*Dz*3 İB,Byte. (4.5). olarak. görüntü. boyutunu,Ç. çözünürlüğü,SR. ise. Resim. alanını. göstermektedir.Örneğin 6*4 inçlik renkli bir görüntünün 150 dpi ile taranması durumunda;. (6inç*150 DPI)*(4inç*150 DPI)=900*600 piksel bilgisayarda kaplayacağı miktar ise;. (6*150)*(4*150)*3=1.6 milyon byte.. Renkli görüntülerde her bir piksel 3byte (24 bit) siyah beyaz görüntülerde herbir piksel 1byte (8 bit),line-art görüntülerde her bir piksel (1/8 byte-1 bit ) yer tutmaktadır.Burada dikkat edilirse çözünürlüğün iki kat artması bilgisayardaki hafıza miktarının iki kat değil daha fazla artırmaktadır.Çünkü görüntünün boyutunun hesaplanmasında çözünürlüğün karesi olarak işleme girmektedir.Yukarıdaki formüle göre değişik çözünürlüklerdeki görüntü boyutu tablo 4.2 örnek olarak verilmiştir.. Tablo 4.2 Değişik çözünürlüklerdeki Görüntü Boyutu. Tarama. 6*4 inç. Byte olarak görüntü boyutu. Çözünürlülüğü(. Görüntü. Piksel. DPI). boyutu. sayısı. 75. 450*300. 135000. 405000. 135.000. 16 875. 150. 900*600. 540000. 1620000. 540.000. 67 500. 300. 1800*1200. 2160000. 6480000. 2.160.000. 270 000. 600. 3600*2400. 8640000 25920000. 8.640.000. 1 080 000. Renkli. Siyah-. Line-art(Piksel sayısı/8). Beyaz.
(28) 19. 4.4 Renk ve Algılama. Tarayıcıların renk kalite ölçümü de yapılacağı için ışık ve renk ile ilgili ön bilgilerin verilmesi yararlı olacaktır. Ayrıca bu bölümde mevcut renk uzayları hakkında temel bilgiler verilecektir.. 4.4.1 Işığın Özellikleri. Fotoğrafı etkileyen en önemli öğe ışıktır. Işık enerjisi olmadan fotoğrafik görüntünün oluşması mümkün değildir. Aslında her hangi bir görüntünün oluşabilmesi için bir enerji türünün madde ile etkileşip, oluşan bilgilerin bir yerlerde depolanması gereklidir. Bizim algıladığımız ve görünür ışık fotoğrafçılığı sadece mor ile kırmızı arasında kalan elektromanyetik dalga boylarını kullanmaktadır Elektromanyetik dalgaların daha uzak köşelerinde bulunan dalgalar bugün radarlarda, radyoteleskoplarda , nükleer tıp ve Radyolojide kendi algımızın dışında kalan bölgeyi görmekte yardımcı oluyor. İnsan gözünün algılayabileceği ışık,elektromanyetik dalgaların çok küçük bir bölümüdür.. Elektromanyetik. dalgalar;Gamma. ışını,Röntgen. ışını,Görülebilir. ışık,Mikrodalgalar,Radar ve Radyo dalgaları gibi bölümlerden oluşmaktadır. Şekil 4.2’de. elektromanyetik. Elektromanyetik. dalgaların. dalgalar insan. dalga gözü. boyuna tarafından. göre. gösterilmektedir.. algılanabilen. bölümüne. “görülebilir spektrum” adı verilir. Şekil 4.2’de görülebilir spektrum büyütülerek çizilmiştir. Görülebilir spektrumun en küçük dalga boyu (mor) 380nm ve en büyük dalga boyu (kırmızı) 780nm dir..
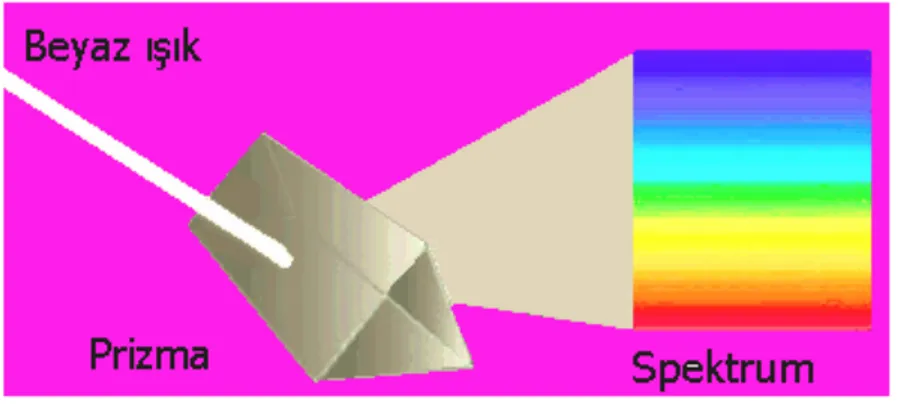
(29) 20. Şekil 4.2 Elektromanyetik dalgalar ve görülebilir ışık spektrumu. Çok ince bir beyaz ışık demeti belli bir açı ile ışık prizmasına düşürüldüğünde prizmaya giriş ve çıkış noktalarında,beyaz ışık kırılır. Beyaz ışık 380nm.’ye kadar değişen dalga boylarındaki çeşitli ışıkların bir toplamı olduğu için bu çeşitli dalga boyları prizmadan geçerken Şekil 4.3’deki gibi değişik açılarda kırılarak prizma çıkışında bir renk demeti meydana getirir.. Şekil 4.3 Beyaz ışığın prizmadan geçerek renk demeti oluşturması.
(30) 21. 4.4.2 Renk Uzayları. Farklı modellerdeki renk saklama ortamları için bazı donanım standartları vardır. Bu standartların hepsinde bir benek üç boyutlu uzayda bir nokta olarak gösterilir. Bu uzayda eksenler renk (kırmızı,yeşil,mavi gibi),parlaklık ve doygunluk ve renk tonu olarak belirlenir.. 4.4.2.1 RGB ve CMY. RGB(Red Green Blue) renk uzayı üç renk bileşeninden oluşmaktadır. Renk bileşenleri çok basit bir geometriye sahiptir ve Şekil 3.5’de gösterildiği gibi her bileşen farklı bir eksende ifade edilir. Toplamalı karışımda diğer renkler temel renkler olarak isimlendirilen kırmızı,yeşil ve mavinin karıştırılması ile elde edilir.(Anıl 1989). R+G=sarı R+B=magenta R+G=cyan R+G+B=beyaz. Şekil 4.4 Toplamalı karışıma göre çalışan ekranlar için RGB küpü.
(31) 22. Bu renk sisteminde her eksen ilgili rengin parlaklığını gösterir. Eksen sisteminin orijinde bütün bileşenler sıfırdır ve bu nokta siyahtır. Bütün bileşenler maksimum olduğunda bu noktada beyaz rengi gösterir. Orijin ile beyaz nokta arasındaki köşegen çizgi üzerindeki bütün noktalar değişik parlaklıktaki gri renklere karşı gelir.. CMY (Cyan,Magenta,Yellow-Subtractive colors) ise RGB uzayının tersidir ve renkleri çıkartmalı olarak kullanan baskı makinesi gibi aletlerde kullanılır.. 4.4.2.2 HSV, HLS ve HSI. HSV (Hue,Saturation,Value) kırmızı,yeşil ve mavinin yeniden organize edilmiş şeklidir. Bileşenleri renk tonu (h:Hue),doygunluk (S:Saturation) ve değer (V:Value) eksenlerinden oluşmaktadır. HLS (Hue,Lightness,Saturation) ise daha karmaşık bir yapıya sahiptir.. HSV’de renk tonu (h),ana rengin dalga boyunun bir ölçüsüdür. Pratikte bu 0 ile 255 arasında değer alabilir. Bu bileşen açısal bir değer olduğu için renk tonu 0 (00) veya 255 (3600) değerlerini aldığında bu ikiside kırmızıyı göstermektedir. Renk tonu bilgisi bir sekizli (byte). sistemde. tutulacağı için 0-255 arasında değer. alınabilir. Bunun açısal karşılığı 256/360 bağıntısı ile gösterilir. Buna göre; 0o=R 120o=G 240o=B dir.. RGB’den HSV’yi hesaplamak için;. Rh R min( RGB) Gh G min( RGB) Bh B min( RGB) formülleri kullanılır.. (4.6).
(32) 23. Renk tonu (Hue). Eğer (4.6)’daki eşitliklerden iki tanesi 0 çıkarsa renk tonu (hue),sıfırdan farklı üçüncü renge bağlı açıdır. Eğer üç tanesi 0 çıkarsa,renk tonu yoktur yani ekranda siyah ve beyaz arasında gri bir seviye görünür. Eğer sadece bir tanesi 0 çıkarsa,renk tonu açısı bu iki bileşen arasındaki açıya bağıdır. Örneğin Rh=0 ise renk tonu (h) (4.7)’deki eşitlikten hesaplanabilir.. h. (240 * Bh ) (120 * Gh ) Bh G h. (4.7). Doygunluk (Saturation). Rengin saflık ölçüsüdür. Eğer doygunluk 0 ise bu renkte renk tonu yoktur ve sadece beyaz ışıktan oluşmaktadır. Eğer doygunluk 255 ise bu renkte beyaz ışık yoktur. RGB uzayından HSV’ye dönüşüm yaparken Doygunluk (S), (4.8)’deki eşitlik yardımı ile hesaplanır.. S. max( R, G, B) min( R, G, B) max( R, G, B). (4.8). Değer (Value). Değer ise rengin parlaklık ölçüsüdür. RGB uzayından HSV’ye dönüşüm yaparken Değer (V),(4.9)’daki eşitlik yardımı ile hesaplanır.. V=max (R,G,B). HSV’de bütün model Şekil 4.5’ de gösterildiği gibi koni şeklinde ifade edilebilir.. (4.9).
(33) 24. Şekil 4.5 HSV eksen sisteminde model bir koni şeklindedir.. HLS(Hue,Lightness,Saturation). Tektronix Incorporation tarafından geliştirilmiş bir model olup renk tonu açısından maviden başlaması (B=0) dışında HSV’deki modele benzemektedir. Ayrıca bu model aydınlanma ekseni L=0 (siyah) ve L=1 (beyaz)’dan geçen (Şekil 4.6) bir çift koniden oluşmaktadır.. Şekil 4.6 HLS eksen sisteminde model bir çift koni şeklindedir..
(34) 25. RGB uzayından HLS’ye dönüşüm yaparken Aydınlanma (L), (4.10)’daki eşitlik yardımı ile hesaplanır.. L. max( R, G, B) min( R, G, B) 2. (4.10). HSV ve HLS renk uzayları kutupsal koordinatlarda tanımlıdır. Bu eksen sisteminde işlem karmaşıklığı fazla olduğu için bu çalışmada tercih edilmemiştir.. 4.4.2.3 CIE Standardı. 1931. yılında. CIE. (Commission. Internationale. de. I’Eclairage). tarafından,ekrandan bağımsız,insanın algılama sistemine yatkın bir renk modeli geliştirilmiştir. CIE XYZ modeli X,Y ve Z şeklinde üç ana bileşenden oluşmaktadır. Bu sistem insan gözündeki 580nm (kırmızı),545nm (yeşil) ve 440nm (mavi) dalga boylarındaki ışığa duyarlı üç çeşit konik hücrenin renkleri algılama prensibine dayanmaktadır. Bu bileşenler toplamalı karışımla değerlendirilirler.. Şekil 4.7 CIE XYZ cromaticity diyagramı.
(35) 26. Y bileşeni,insan gözünün parlaklığa olan duyarlığına karşı gelir. X ve Z bileşenleri ise insanlarla yapılan deneyler sonucunda oluşturulmuştur.. 4.4.2.3.1 CIE XYZ. Chromaticity değerleri;. X X Y Z Y y X Y Z Z z X Y Z x. . x y z 1 olur. (4.11). CIE Chromaticity diagramı (Şekil 4.7),bütün görülebilir renkler için X ve Y’ye bağlı bir şekildir. Kenardaki bütün noktalar,belli bir dalga boyundaki saf renkleri gösterir. Beyaz bütün renklerin eşit olarak. (x=y=z=1/3) birleştirildiği. merkez noktadır. Üç renk için oluşturulan renk serisi bir üçgeni oluşturmaktadır.1976 yılında CIE tarafından iki yeni renk uzayı Luv ve Lab standardı oluşturulmuştur. Bu iki farklı uzayın en belirgin özelliği renk uzayının algılama yönünden düzgün değişim göstermesidir(perceptually uniform). Her iki renk uzayında da L bileşeni parlaklığı,diğer bileşenler ise rengi oluşturmaktadır.Her iki renk uzayı da CIE XYZ renk uzayına bağlı olarak ve [XnYnZn] refarans beyazı alınarak oluşturulur. D50 referans beyazı aşağıdaki formüle göre hesaplanmıştır (Hardeberg,1999). Bu çalışmada test kartımızın standartları D50 olduğundan bu değerler kullanılmıştır. max. Xn . l. D50. ( ) * x ( )d 96,42. min max. Yn . l. D50. ( ) * y ( )d 100,00. min. max. Zn . l min. D50. ( ) * z ( )d 82,49. (4.12).
(36) 27. 4.4.2.3.2 CIE Luv. CIE XYZ renk uzayından CIE Luv renk uzayına dönüşüm için gerekli eşitlikler aşağıdaki gibidir.. u 13 * L * (u u n ). (4.13). v 13 * L * (v v n ). 4* X X 15 * Y 3 * Z 9 *Y v X 15 * Y 3 * Z. u . (4.14). Burada u’n ve v’n değerleri , u’ ve v’ değerleri gibi hesaplanır sadece X , Y , Z değerleri yerine Xn , Yn , Zn kullanılır.. 4.4.2.3.3 CIE Lab. a ekseni kırmızı ve yeşil , b ekseni ise sarı ve mavi renklerdeki değişimi gösterir. Sonuçta oluşan CIE Lab renk uzayı Şekil 4.8 de gösterilmiştir.. Şekil 4.8 CIE Lab renk uzayı.
(37) 28. CIE Lab renk uzayından tekrar CIE XYZ renk uzayına dönüşüm için;. 1. X X * Xn. 3 . 1. Y Y * Yn. 3 . 1. Z Z * Zn. 3 . (4.15). Şeklinde yazarsak X* , Y* ve Z* aşağıda olduğu gibi yazılır.. L* 16 116 200Y * b * Z* 200 * a 500Y * X* 500. Y* . (4.16). (4.15) ve (4.16) daki eşitliklerden yararlanarak eşitlik aşağıdaki gibi yazılır. X XnX * Y YnY *. (4.17). Z ZnZ *. RGB ve Lab arasında dönüşüm formülleri detaylı olarak 5. bölümde verilmektedir.. 4.5. RGB Değerlerinden Gri Seviye Değerinin Hesabı. Renkli görüntülerin gri seviye değerlerini(intensity) elde etmek için birçok formüller vardır. Bunlardan ilki RGB küpünde köşegeni gösteren mesafedir ki literatürde en kötü yöntem olarak tanımlanmaktadır (Bourke,1989).. Buna göre yoğunluk (intensity) değeri. I R2 B2 G2. (4.18).
(38) 29. ikinci yöntem renk kanallarının basit ortalamasıdır.. I. RG B 3. (4.19). Renkler üzerine yapılan bilimsel araştırmalarda ise ağırlıklı ortalama değeri kullanılmaktadır.. I. 3* R 4 *G 2 * B 9. (4.20). NTSC ve Pal standartlarında kullanılan formül. I 0.299 * R 0.587 * G 0.114 * B. (4.21). Önceleri CCIR Rec. 709 standardı olarak geçen ve daha sonra ITU-R BT 709 olan standart ise aşağıdaki eşitliği kullanmaktadır.. I 0.2125 * R 0.7154 * G 0.0721 * B. (4.22). Bu tez çalışmasında en kötü olarak adlandırılan birinci formül hariç diğerlerinin hepsi kullanılmıştır. Çalışmada kullanmak için geliştirilen programda yukarıdaki formüller kullanıcının seçimine bırakılmıştır..
(39) 30. V.TARAYICILARDA YAPILAN TESTLER. Tarayıcıların kalitesi hakkında karar verebilmek için çeşitli test yöntemleri mevcuttur. Şimdiye kadar yapılan testler genelde radyometrik doğruluk üzerine olmuştur ve geometrik doğruluk üzerine çalışma pek yapılmamıştır. Bu konuda yapılan çalışmaların incelenmesinde geometrik doğruluk üzerine çalışanların sadece fotogrametri ile uğraşanların yaptığı görülür. Geometrik üzerine yapılan çalışmalar Baltsavias (1994) , Jacopsen (1996) ve Gruber (2001) tarafından yapılmıştır.. Tarayıcılarda yapılan diğer testler , geometrik çözünürlük testi , radyometrik çözünürlük testi ve renk doğruluğu testidir. Geometrik çözünürlük ve radyometrik çözünürlükle ilgili çalışmada geometrik çözünürlük ve tonal doğruluk ele alınmasına rağmen renk için matematiksel olarak bir çalışma yapılmadığı görülür.. 5.1 Geometrik Doğruluk Testi. Geometrik doğruluk testinde tarama esnasındaki oluşan digital görüntüdeki geometrik bozukluk araştırılır. Bu amaç için öncelikle koordinatları hassas olarak ölçülmüş test plakasına ihtiyaç vardır. Ancak bu test plakasını piyasadan bulmak zordur. Çünkü bu plakaların ölçülen koordinatlarının en fazla 2-3 mikron hassasiyette olması gerekmektedir. Bu hassasiyetteki piyasada mevcut plaka boyutları en fazla 10*10 cm boyutundadır. Ancak bu çalışmada hedef aynı zamanda Fotogrametrik tarayıcıların test edilmesi olduğundan bu boyuttaki test plakaların bu çalışmanın ihtiyacını karşılamayacağı düşünülmüştür. Plaka boyutlarının en az hava fotoğrafı boyutu olan 23*23 cm2’lik bir plakanın kullanılması gerekliliği olduğu kanaatine varılmıştır. Test plakalarını üreten firmalarla yapılan görüşmelerde bu boyutta test plakalarının olmadığını ancak özel istek üzerine üretilebileceğini ve fiyat olarak minimum 4000 dolara mal edilebileceklerini bildirmişlerdir. Bu çalışmada yine 24*24 cm olan test plakası kullanılmış ve bu test plakası ile ilgili bilgiler 6. bölümde verilmiştir..
(40) 31. Geometrik doğruluk testinde yapılan işlemde tarama öncesi hassas olarak elde edilen test plakası grid koordinatlarının tarama sonrası grid kesişimlerinin piksel koordinatları bulunmakta ve piksel koordinatlarından grid koordinatlarına bir dönüşüm yapılmaktadır. Dönüşümde matematik model olarak helmert yada afin dönüşümü kullanılmaktadır. Dönüşümden sonra grid noktalarındaki koordinat değişimlerine göre tarayıcının geometrik doğruluğu hakkında yorum yapılabilir.. 5.2 Geometrik Çözünürlük Test Yöntemi. Geometrik çözünürlükte amaç tarayıcılardaki optik eksen hakkında bilgi sahibi olmaktır. Geometrik çözünürlük testinde yine çeşitli test plakalarından yararlanılır. Bu test plakalarını değişik firmaların üretmesine rağmen matematiksel yapıları aynıdır. Bilimsel çalışmalarda bu amaç için en fazla kullanılan test plakaları USAF 1951 test plakası ve NBS 1010A mikroskobik test plakasıdır. Bu çalışmada her iki test plakasında temin edilmiş ve kullanılmıştır. Bu test parçaları hakkında detaylı bilgiler ve matematiksel yapıları 7. bölümde verilmiştir. Geometrik çözünürlük için kullanılan yöntem Modülasyon Transfer Fonksiyonudur.. 5.2.1 Modülasyon Transfer Fonksiyonu. Çözünürlük , detayların ne kadar iyi korunduğunun , görüntü işleminden sonra ne kadar iyi elde edildiğinin göstergesidir. Konumsal detaylar (spatial detail) detayın konumsal frekansı (spatial freguency) ile ölçülür (Williams 1998). Tarayıcılarda konumsal frekans için belli aralıklarla çizilmiş çizgi hatları kullanılır . Her bir çizgi gurubu topluluğu , bunun konumsal frekansını tanımlar. Bu frekans milimetredeki çizgi sayısı olarak bilinir. Örneğin milimetrede 2 çizgi olan bir grubun frekansı ikidir . Bu her bir milimetrede siyah ve beyaz barlardan oluşan iki çizgiyi ifade eder ve bu çizgiler bir değil ardışık en az üç tanedir. Her bir siyah ve beyazdan oluşan çifte ise “devir” denir. Şekil (5.1).
(41) 32. Şekil 5.1 Kare Dalgalar. Şekil 5.1 deki barlara kare dalga sinyaller (square wave signals) denir. Bilimsel araştırmalarda kare dalga sinyalleri yanında sinüs dalga sinyalleri de kullanılır. Bu barların tarama esnasında frekansları tarama için önemli bir özelliktir. Ve tarayıcı kalitesi hakkında bilgi edinmede kullanılır .. Tarayıcıda tarama sonrası değişik frekanstaki bu barların görüntüleme sonrası elde edilen sinyalleri şekil 5.2 deki gibidir.. Şekil 5.2 Kare dalgalardan max ve min yoğunluk (intensity) değerlerinin elde edilmesi.
(42) 33. Şekilde de görüldüğü gibi değişik frekanslarda görüntüleme işlemi boyunca tarayıcı tarafından transfer edilen bilginin oranı farklı olmaktadır. Bu oranda sinyallerin. maksimum. ve. minimum. yoğunluk. (intensity). değerleri. ile. tanımlanmaktadır. Bu tanıma göre modülasyon fonksiyonu. Modülasyon . I max I min I max I min. (5.1). Olmaktadır . “I” yoğunluk (intensity) değerini göstermektedir . Burada dikkat edilmesi. gereken. konu. yoğunluk. (intensity). değeri. yoğunlukla. (density). karıştırılmamasıdır .. Tarayıcılarda modülasyon transferini elde etmek istersek öncelikle frekansları belli olan bir test plakasına ihtiyacımız vardır. Test plakası tarayıcı da taradıktan sonra her bir frekans için modülasyon transfer değeri hesaplanır. Örneğin frekansı 5 olan gurup için maksimum yoğunluk (intensity) değeri 70 minimum yoğunluk (intensity) değeri 15 olsun buna göre ;. Modülasyon=. 70 15 =0.65 70 15. olur.. Yoğunluk (intensity) değerini ölçmek için genelde görüntü analiz programları kullanılır. Analiz programlarında her bir grup ayrı ayrı incelenerek her bir grup için ayrı bir modülasyon transfer değeri. bulunur. Analiz programları modülasyon. değerinden ziyade maksimum ve minimum yoğunluk (intensity) değerini vermektedir. Modülasyon transfer değeri ise ayrıca hesaplanır.. Her bir gurup için elde edilecek modülasyon transfer değeri yardımı ile MTF eğrisi çizilir. Ardışık gruplara karşılık gelen modülasyon değerleri y eksenini bu gurupların frekansları da x eksenini göstermektedir. Buna göre bir modülasyon transfer fonksiyonu şekil 5.3 deki gibi olur..
(43) 34. Modülasyon (y). Modülasyon Transfer Fonksiyonu. 100 90 80 70 60 50 40 30 20 10 0. Yanlış Çözünürlük. 0. 50. 100. 150. Konumsal Frekansı (x). Şekil 5.3 Modülasyon transfer fonksiyonu. Eğrinin. x eksenini kestiği nokta kesit frekansı olarak adlandırılır. Kesit. frekansından sonraki kısımlar tarayıcı tarafından algılanmıyor demektir ki bu kısma yanlış çözünürlük (false resolution ) denir.. 5.2.1.1 Modülasyon Transfer Fonksiyonunun Yorumlanması. Tarayıcıların optik çözünürlüğü hakkında bir karşılaştırma yapmak için modülasyon transfer fonksiyonuna bakmak gerekir. Modülasyon değerinin örneğin 1 olması giren frekansın ( yani burada kontrastın ) tamamının görüntüleme sonucunda elde edildiğini gösterir. 0,5 olması ise ancak %50’sinin elde edilebildiğini ifade eder. 0 olması demek ise görüntünün tamamen kaybolduğunu gösterir. Burada görüldüğü gibi değerler 0-1 arasında değer olur. 0 değeri x eksenini kestiği nokta demektir ki bundan sonraki değerleri tarayıcı algılayamıyor demektir. Tarayıcıları karşılaştırırken de şekil 5.4 incelenirse.
(44) 35. Şekil 5.4 MTF nin yorumlanması. 1 nolu tarayıcı düşük modülasyona yüksek çözünürlüğe sahip. 2 nolu tarayıcı yüksek modülasyona ve düşük çözünürlüğe sahip. Bu tarayıcının görüntü kalitesi birinciye göre daha iyi olur. 3 nolu tarayıcıda ise yüksek modülasyon ve yüksek çözünürlüğe sahiptir ki bu 1. ve 2. den daha kaliteli bir tarayıcıdır.. 5.3 Radyometrik Çözünürlük Test Yöntemi. Radyometrik çözünürlükte tarayıcının tonal yani gri tonlarına olan tepkisi araştırılır. Bu amaç için kullanılan test parçası ise eşit aralıklı artan gri seviye skalasıdır (şekil 5.5). Bu test parçasını kullanabilmek için yoğunluk değerlerinin her bir karecik için bilinmesi gereklidir.. Şekil 5.5 Radyometrik çözünürlük test plakası.
(45) 36. Bu değerler Labaratuvarlarda densitometre denen yoğunluk ölçen aletlerle ölçülür ve kalibre edilmiş yoğunluk değerleri olarak değerler verilir. Radyometrik çözünürlük testinde piksel değeri –Yoğunluk grafikleri elde edilir. Bu grafik lineer olmayıp içbükey şeklinde çıkar. Radyo metrik doğruluk testinde piksel değerinin geçirgenlikle bağlantılı grafiği ve de tarayıcının eşit yoğunluk adımlarında lineer bir tepki verip vermediğine bakılır. Bu eğri dışbükey artan bir şekildedir (D Amato 2000). Eğrinin lineer olması gerekmektedir.. Bu testte üçüncü olarak sinyal-gürültü oranı bulunur. Sinyal gürültü oranında gri seviyesinde yapılan her bir karecik içindeki standart sapmalar hesaplanıp standart sapma-yoğunluk grafiği çizilmektedir.. 5.4 Renk Doğruluk Testi. 1931 yılında Uluslararası Aydınlatma Komisyonu cihazlar arasındaki renk uyumunu sağlamak için koordinatları x,y,z olan CIE sistemini geliştirmişlerdir. Bu sistem algılanabilir tüm renkleri içermektedir ve alet bağımsızdır. Bu koordinat sisteminin herhangibir bölgesindeki küçük koordinat. değişikliği, koordinat. sisteminin farklı bölgelerinde değişik oranlarda renk değişimlerine neden olmaktadır. Bu olumsuzluğu giderebilmek için CIE sistemi yardımıyla CIELab olarak tanımlanan ve koordinatları L,a,b olan yeni bir koordinat sistemi geliştirilmiştir. Bu sistemde L benzerlik bileşeni, a (erguvan-yeşil), b (mavi-sarı) kromatik bileşenlerdir.. CIELab’da renkler arasındaki mesafe Euclidian mesafesi olarak adlandırılır ve E ile gösterilir. (Şekil 5.6) E’nin yorumlanması için değişik sınıflandırmalar vardır. Tarayıcılar icin Abrardo (1996 ) şu sınıflandırmayı yapmıştır.. E<1 ise orijinal ile tarayıcının rengi arasında hiç renk farkı yoktur 1<E<3 ise mükemmel renk kazanımı vardır 3<E<6 ise iyi renk kazanımı vardır 6<E<10 ise normal 10<E ise renkler kötü elde edilmiştir..
(46) 37. Şekil (5.6) Euclidean mesafesi. Renk uyumluluğunu tespit edebilmek için yapılan testlerde, renkli skalaya ait RGB değerleri geliştirilen uygulama programı yardımıyla okunmaktadır. Üretici firma ise renkli skalaya ait Lab değerleri internette verilmiştir. Bu nedenle okunan RGB değerlerinin Lab değerlerine dönüştürülmesi ve aradaki farkların tespit edilmesi gerekmektedir. RGB-Lab dönüşüm işlemleri aşağıda belirtilen formülasyon ile gerçekleştirilir.. Öncelikle yapılacak dönüşüm için parlaklık katsayısı belirlenmelidir. İkinci adım olarak RGB değerlerinin normalize edilmesi gerekmektedir. Yani bit derinliği ortadan kaldırılarak maksimum 100 ile ifade edilebilecek hale getirilmektedir. Örneğin 24 bit taranmış bir resmin her bir rengini (R,G,B) 24/3=8 bit ifade etmektedir. Böylece 28-1=255 elde edilmektedir. Bu derinliği ortadan kaldırmak için:. Red 255 Green G 255 Blue B 255 R. (5.2).
(47) 38. işlemleri gerçekleştirilir.. Üçüncü adımda ise normalize edilmiş RGB değerleri aşağıdaki formüller ile XYZ değerlerine dönüştürülür:. X A11 Y A 21 Z A31. A12 A22 A32. A13 R A23 G A33 B . (5.3). Dördüncü ve son adımda ise XYZ değerlerinin CIELAB değerlerine dönüşümü aşağıdaki gibi gerçekleştirilmektedir (Hardeberg 1995).. L 116 * (. Y ) 16 Yn. X a 500 f X n. Y b 200 f Yn. . . (5.4). Y f Yn. . . (5.5). Z f Zn. . . (5.6). Burada. 13 f ( ) 16 7.787 116 . 0.008856. (5.7). diger durumlarda. Bütün bu işlemlerden sonra elde edilen Lab değerleriyle, tarama karakteristiğini belirgin hale getirecek orijinal renk değerlerinden olan renk farkı bulunarak test tamamlanmaktadır. Şekil (5.6).
Şekil

+7




Outline
Benzer Belgeler
Geliştirilen biçim grameri modeli yardımıyla yüzlerce yıllık, çok çeşitli, İslami geometrilerle akraba çok fazla sayıda yeni geometrik kaplamanın elde edilebildiği
Yığılmış Aktif Şekil Modeli yöntemi kullanılarak elde edilen 56 nirengi noktası ile ifade edilen yüz öznitelikleri imge dizisi boyunca Lucas-Kanade Optik Akış
Şekilde verilen açılara göre, a kaçtır?.. DOĞRUDA AÇILAR Doğruda Açı Simedy an A kademi Örnek 17 [AF // [EG. Verilen açılara göre, a kaç derecedir?.. DOĞRUDA AÇI
Doğru üzerindeki A noktası merkez olmak üzere yay çizilerek B ve C noktaları bulunur.. B ve C merkez olmak üzere doğru dışında çizilen aynı yarıçaplı yay ile D noktası
*A merkez noktasına pergeli yerleştirerek, açı kollarını kesen bir yay çiziniz.(BC) * Pergeli B ve C noktalarına yerleştirerek, (pergelin ilk açıklığını bozmadan) birer
*Yayın, daireyi kestiği noktaları tepe noktası ile birleştirerek üçgen çiziniz.. *Çizilen çizgilerin daireyi kestiği noktaları karşılıklı birleştirerek
Piramit: Tabanı dörtgen (kare veya farklı bir dörtgen) kenar yüzeyleri üçgen olan geometrik şekle piramit denir. Yan yüzeyler eşkenar, ikizkenar veya farklı bir üçgen
✿ Ali, yarım tur sağa doğru döndüğünde mavi renk araba görür.. ✿ Ali, sağa doğru üç çeyrek tur döndüğünde gördüğü araba
