FEN BĐLĐMLERĐ ENSTĐTÜSÜ
MOBĐL ROBOTLAR ĐÇĐN
BĐR TÜMYÖNLÜ GÖRÜŞ SĐSTEMĐNĐN TASARIMI VE GERÇEKLEŞTĐRĐLMESĐ
Salim AZAK YÜKSEK LĐSANS TEZĐ
ELEKTRĐK-ELEKTRONĐK MÜHENDĐSLĐĞĐ ANABĐLĐM DALI
FEN BĐLĐMLERĐ ENSTĐTÜSÜ
MOBĐL ROBOTLAR ĐÇĐN
BĐR TÜMYÖNLÜ GÖRÜŞ SĐSTEMĐNĐN TASARIMI VE GERÇEKLEŞTĐRĐLMESĐ
Salim AZAK YÜKSEK LĐSANS TEZĐ
ELEKTRĐK-ELEKTRONĐK MÜHENDĐSLĐĞĐ ANABĐLĐM DALI KONYA, 2009
Bu tez / / 2009 tarihinde aşağıdaki jüri tarafından oybirliği / oyçokluğu ile kabul edilmiştir.
Doç.Dr. Salih GÜNEŞ Yrd.Doç.Dr. Ömer AYDOĞDU Yrd.Doç.Dr. Nihat YILMAZ
i
ÖZET
YÜKSEK LĐSANS TEZĐ
MOBĐL ROBOTLAR ĐÇĐN
BĐR TÜMYÖNLÜ GÖRÜŞ SĐSTEMĐNĐN TASARIMI VE GERÇEKLEŞTĐRĐLMESĐ
Salim AZAK Selçuk Üniversitesi Fen Bilimleri Enstitüsü
Elektrik-Elektronik Mühendisliği Anabilim Dalı Danışman : Yrd. Doç. Dr. Nihat YILMAZ
2009, 141 Sayfa Jüri : Doç. Dr. Salih GÜNEŞ
Yrd. Doç. Dr. Nihat YILMAZ Yrd. Doç. Dr. Ömer AYDOĞDU
Geniş bir görüş açısı sağlayan katadioptrik görüş sistemleri video konferans, robot seyri ve görsel izleme gibi birçok alanda kullanılmaktadır. Yapılan bu tez çalışmasında hiperbolik aynalı tümyönlü görüş sistemi ve bu görüş sisteminin mobil robotlar üzerindeki uygulaması ayrıntılı bir şekilde incelenmiştir.
Robotun çevresindeki 360° lik görüş alanının kameraya aktarılması için hiperbolik aynalı tümyönlü görüş sistemi kullanılmıştır. CCD kablosuz kamera ile yakalanarak bilgisayara aktarılan görüntüler, görüntü işleme algoritmalarının uygulanabilmesi için önişleme aşamasında dairesel görüntüden panoramik görüntüye çevrilmiştir. Elde edilen bu görüntü kullanılarak robotun güvenli bir şekilde seyrini sağlamak ve nesne algılaması yapabilmek amacıyla robotun bulunduğu ortamdaki alan, zemin ve zemin olmayan bölgeler olarak ikiye ayrılmıştır. En sağlıklı zemin çıkarımını sağlamak için 6 farklı yöntem denenmiştir. Bunlar sırasıyla entropi karşılaştırma yöntemi, ortalama değer yöntemi, L*a*b* komşuluk yöntemi, L*a*b* etiketleme yöntemi, renk haritası yöntemi ve HSI histogram karşılaştırma yöntemidir. Yapılan deneysel çalışmalar neticesinde en uygun yöntemin HSI renk uzayında yapılan histogram karşılaştırması olduğu anlaşılmıştır. Zemin olan bölge belirlendikten sonra robotun ilerleyebileceği koridorlar belirlenmiş ve alternatif yollar robota sunulmuştur.
Anahtar Kelimeler : Tümyönlü görüş, katadioptrik, nesne algılaması, tek
ii
ABSTRACT
MS THESIS
DESIGN AND IMPLEMENTATION OF AN OMNIDIRECTIONAL VISION SYSTEM
FOR MOBILE ROBOTS Salim AZAK Selcuk University
Graduate School of Natural and Applied Sciences Department of Electrical-Electronic Engineering Supervisor : Assist.Prof.Dr. Nihat YILMAZ
2009, 141 Pages
Jury : Assoc.Prof.Dr. Salih GÜNEŞ Asist.Prof.Dr. Nihat YILMAZ Asist.Prof.Dr. Ömer AYDOĞDU
Catadioptric vision systems that provide a large field of view are used in many applications such as robot navigation, video conferencing and visual surveillance. In this thesis work hyperboloidal mirror omnidirectional vision system and application of this vision system on mobile robots have been investigated in detail.
Hyperboloidal mirror omnidirectional vision system has been used for transfering to camera 360 degrees field of view around the mobile robot. In pre-processing phase for apply image pre-processing algorithms images which have been captured by CCD camera and transferred to computer have been transformed to panoramic image from circular image. By using this captured image, for providing a safely navigation to mobile robot and performing obstacle detection, environment around the mobile robot has been classified in two areas as floor and non-floor. Six different methods have been tested to achieve most reliable floor determination. These methods are entropy comparision method, mean value method, L*a*b* neighbourhood method, L*a*b* labelling method, colormap method and HSI histogram comparison method. End of the performing experimental works it has come out that HSI histogram comparison method is the optimal method. After detect the area which is floor, corridors that robot can move ahead has been designated and alternative routes have been presented to the robot.
Keywords: Omnidirectional vision, catadioptric, obstacle detection, single
iii
TEŞEKKÜR
Tez çalışmam süresince değerli bilgi ve tecrübeleriyle bana yol gösteren, gerekli araştırma ve geliştirme çalışmalarımda yardımlarını esirgemeyen tez danışmanım Sayın Yrd. Doç. Dr. Nihat YILMAZ’a, Selçuk Üniversitesi Mühendislik Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği bölümünün değerli öğretim elemanlarına, teşekkürü bir borç bilirim.
Ayrıca tez çalışmam süresince bana her zaman moral veren ve destek olan değerli aileme sonsuz teşekkür ederim.
iv ĐÇĐNDEKĐLER ÖZET... i ABSTRACT ... ii TEŞEKKÜR... iii ĐÇĐNDEKĐLER ... iv SĐMGELER VE KISALTMALAR ... v ŞEKĐLLER LĐSTESĐ... vi ÇĐZELGE LĐSTESĐ... xi 1 GĐRĐŞ... 1
1.1 Mobil Robotlarda Görme... 2
1.2 Tümyönlü Görüş ... 3
1.3 Kaynak Araştırması ... 4
2 TÜMYÖNLÜ GÖRÜŞ SĐSTEMLERĐ ...10
2.1 Balıkgözü Lensler...12
2.2 Mekanik Tarayıcılar ...14
2.3 Çok Kameralı Sistemler...19
2.4 Katadioptrik Sistemler ...23
2.4.1 Tek görüş noktalı sistemler ...35
2.4.2 Tek görüş noktalı olmayan sistemler ...51
2.5 Tümyönlü Görüntünün Perspektif Görüntüye Dönüştürülmesi...57
3 TASARLANAN TÜMYÖNLÜ GÖRÜŞ SĐSTEMĐ ...67
3.1 Donanım...67
3.2 Geliştirilen Yazılım ...75
4 DENEYSEL SONUÇLAR ...106
4.1 Panoramik Görüntü Oluşturma ...106
4.2 Entropi Karşılaştırma Yöntemi ...110
4.3 Ortalama Değer Yöntemi...113
4.4 L*a*b* Komşuluk Yöntemi...117
4.5 L*a*b* Etiketleme Yöntemi ...122
4.6 Renk Haritası Yöntemi ...124
4.7 HSI Histogram Karşılaştırması ...125
5 SONUÇ ...135
v
SĐMGELER VE KISALTMALAR
AGV : Automated Guided Vehicle COPIS : Conic Projection Image Sesnsor SVP : Single View Point
PTZ : Pan - Tilt - Zoom
SOS : Stereo Omnidirectional Sistem RGB : Red - Gren - Blue
CNC : Computer Numerical Control CCD : Charge-Coupled Device Lab : L*a*b* Color Space HSI : Hue - Saturation - Intensity
vi
ŞEKĐLLER LĐSTESĐ
Şekil 2.1 Bazı görüş sistemlerine ait görüş alanları...11 Şekil 2.2 Fotoğraf makinası önüne takılmış bir balıkgözü lens (Nikon) ...12 Şekil 2.3 Balıkgözü lensin içyapısı...13 Şekil 2.4 Farklı açıda gelen iki ışının balıkgözü lensten geçişi (Xiong ve Turkowski
1997). ...14 Şekil 2.5 Mekanik tarayıcı sistem (Cornell Univ Plant Path Photo Lab). ...15 Şekil 2.6 Mekanik tarayıcı tarafından yakalanan fotoğraflar (Peleg ve ark. 2000)....16 Şekil 2.7 Mekanik tarayıcının çalışma yapısı (Micusik Pajdla 2006) ...16 Şekil 2.8 (a) Sıradan bir mekanik tarayıcının çalışması (b) R yarıçaplı daire üzerinde
dönen mekanik tarayıcı ...17 Şekil 2.9 Çift yarık ve tek kameradan oluşan mekanik tarayıcı sistem ...18 Şekil 2.10 Mekanik bir tarayıcı ile oluşturulmuş yüksek çözünürlüklü panoramik
görüntü (Strauss ve Comby 2007). ...19 Şekil 2.11 Stereo görüş (Peleg ve ark. 2000). ...19 Şekil 2.12 (a) Merkez kameranın yan ve üst kameraya olan uzaklığı. (b) Yüksek
çözünürlüklü üç kamera. (c) 12 üniteden oluşan ve küresel bir yüzey etrafına monte edilmiş stereo sistem...20 Şekil 2.13 (a) Küresel özyapı görüntüsü (b) Küresel derinlik görüntüsü ...21 Şekil 2.14 SOS sisteminin çalışmasına ait blok diyagram...22 Şekil 2.15 (a) T = t - ∆t anında alınan görüntü ve (b) T = t anında alınan görüntü. (c)
Oluşturulan tahmini derinlik görüntüsü. (d) Algılanmış hareketli alan...23 Şekil 2.16 Konveks bir ayna ve sıradan kameradan oluşan bir katadioptrik sistemin
yapısı...24 Şekil 2.17 Farklı kesitlerdeki aynalarla oluşturulmuş sistemler ve görüş alanları. (a)
Konik aynalı sistem (b) Küresel aynalı sistem (c)Hiperbolik aynalı sistem (d)Parabolik aynalı sistem (Drocourt ve ark. 2006). ...25 Şekil 2.18 Değişik yapıdaki katadioptrik sistemler (Kondo ve ark. 2005, Yoshida ve
ark. 2006, Fiala ve Basu 2002)...28 Şekil 2.19 Hiperbolik, parabolik, küresel ve konik ayna sistemleri (Derrien ve
Konolige 2000)...30 Şekil 2.20 Dairesel görüntü üzerindeki çözünürlük dağılımı...31 Şekil 2.21 Yüzeyden gelen ışınların aynadan yansıyarak kamera içindeki görüntü
düzlemine düşmesi ...31 Şekil 2.22 (a) Zemin üzerine işaretlenmiş üç nokta (b) Çözünürlüğün uzaklığa bağlı
vii
Şekil 2.23 (a) Hiperbolik ayna ile gerçekleştirilmiş tek görüş noktalı sistem. (b)
Sensöre ait doğrusal olmayan çözünürlük eğrisi. ...33
Şekil 2.24 (a) Küresel ayna ile gerçekleştirilmiş çok görüş noktalı sistem. (b) Sensöre ait doğrusal çözünürlük eğrisi ...33
Şekil 2.25 Amaçlanan tümyönlü görüş sensörünün modeli...34
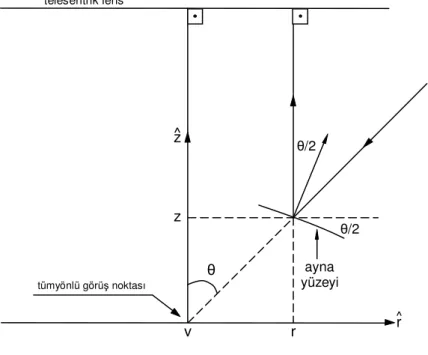
Şekil 2.26 Sabit görüş noktası denklemlerini elde etmekte kullanılan geometri ...36
Şekil 2.27 Elipsoidal aynanın geometrik yapısı ...40
Şekil 2.28 Elipsoidal ayna kullanılmış tek ve çok aynalı iki tür katadioptrik sistemin geometrik yapısı (Yoshida ve ark. 2006)...41
Şekil 2.29 Bir para-katadioptrik sistemin kesiti ...42
Şekil 2.30 Telesentrik bir lensin N cisminden yansıyan paralel ışınları paralel olarak G görüntü düzlemine düşürmesi...42
Şekil 2.31 Telesentrik lensli ve normal lensli iki kameraya ait görüntü...43
Şekil 2.32 Para-katadioptrik kamera...44
Şekil 2.33 Yansıtıcı yüzeyin denklemini elde etmek için kullanılan geometrik yapı.44 Şekil 2.34 Paraboloidal ayna kesiti...46
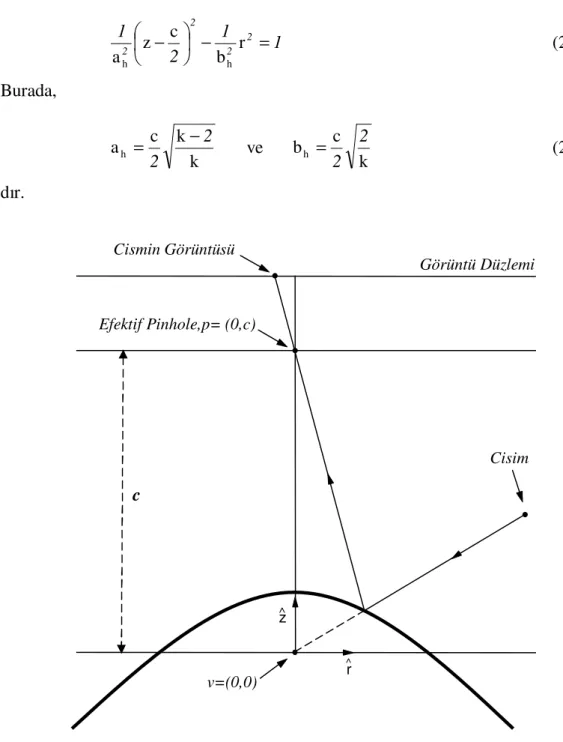
Şekil 2.35 Odaklarına görüş noktası ve kamera pinholü yerleştirilmiş hiperboloidal aynanın geometrik yapısı (Baker ve Nayar 1998)...47
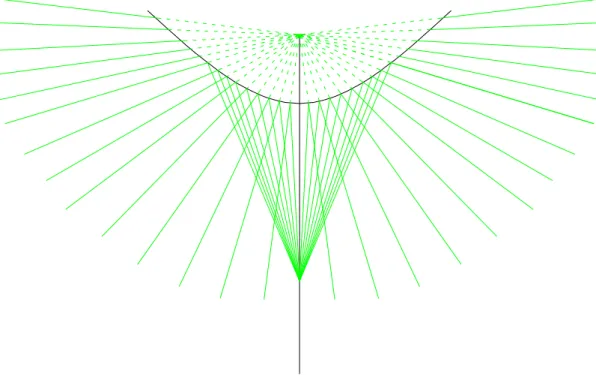
Şekil 2.36 Hiperboloidal aynada odağı hedef alarak gelen ışınların ayna yüzeyinden yansıması...48
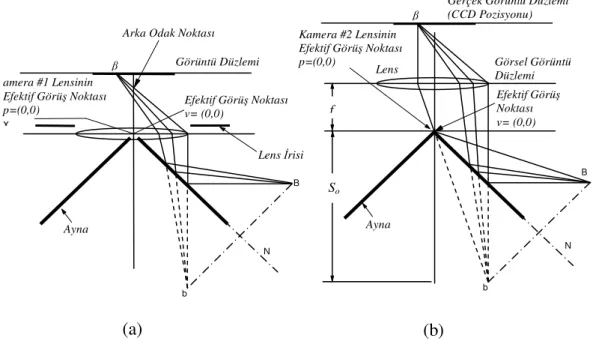
Şekil 2.37 Hiperboloidal aynalı sistemin geometrik yapısı (Negishi ve ark. 2004)...49
Şekil 2.38 (a) Đki loblu küresel aynalı stereo tümyönlü sistem.(b) Đki loblu yüzey üzerine yansıtılmış görüntü (Orghidan 2005). ...53
Şekil 2.39 Konik aynaya ait geometrik yapı (Baker ve Nayar 1998). ...54
Şekil 2.40 Tek görüş noktalı konik ayna geometrisi ...55
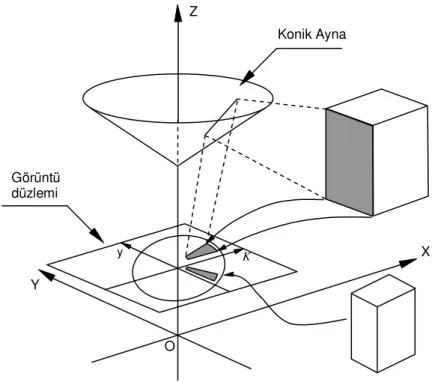
Şekil 2.41 Cisimden yansıyan ışınların lensten geçerek görüntü düzlemine düşmesi56 Şekil 2.42 Konik aynada cismin görüntüsünün görüntü düzlemi üzerine düşmesi. (Yagi ve ark. 1992). ...57
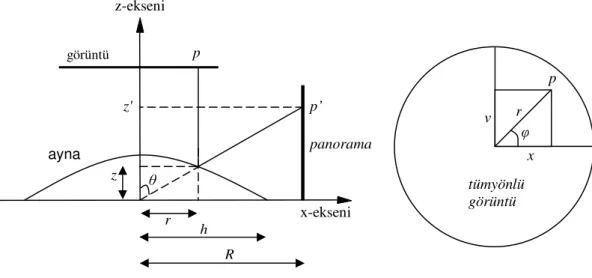
Şekil 2.43 Panorama oluşumu ve p noktasının dairesel görüntü üzerindeki koordinatları (Moshtagh 2003)...58
Şekil 2.44 Görüntü üzerindeki her bir noktanın panorama üzerine direkt olarak yansıtılması (Moshtagh 2003) ...59
Şekil 2.45 Tümyönlü görüntünün perspektif görüntü düzlemine ters yansıması (Oneo ve ark. 1998)...60
Şekil 2.46 Piksellerin polar koordinatlar cinsinden ve kartezyen koordinatlar cinsinden gösterilmesi (Maeda ve Idou 2007). ...61
Şekil 2.47 Uzaydaki üç boyutlu bir cismin görüntüsünün hiperboloidal ayna üzerinden yansıdıktan sonra görüntü düzlemine düşmesi (Wang ve ark 2006). ...62
viii
Şekil 2.49 Dairesel görüntünün perspektif görüntüye dönüştürülmesi...64
Şekil 2.50 Basit açılım dönüşümü ...65
Şekil 3.1 Tasarlanan sistemin blok şeması...67
Şekil 3.2 Kullanılan aynanın Cad programı ile yapılmış üç boyutlu çizimi ...68
Şekil 3.3 Krom ile kaplanmış hiperboloidal ayna ...69
Şekil 3.4 Sistemin tasarımında kullanılan 2.4GHz kablosuz CCD kamera ...70
Şekil 3.5 Farklı odak uzaklığına sahip lenslerle aynı mesafeden alınan görüntüler...70
Şekil 3.6 Odak uzaklıkları farklı lensler ...71
Şekil 3.7 Kamera merkez eksenine siyah engel yerleştirerek içeri yansımaların yok edilmesi ...72
Şekil 3.8 Görüntünün bilgisayara aktarılmasında kullanılan kablosuz alıcı ve PCMCIA Express TV Capture Kartı ...73
Şekil 3.9 Bluetooth modülü...74
Şekil 3.10 Dairesel görüntü üzerinde iç ve dış dairenin yarıçapı ile merkez noktasının tespit edilmesi...76
Şekil 3.11 Görüntü dönüşüm işlemine ait akış diyagramı - 1 ...77
Şekil 3.12 Görüntü dönüşüm işlemine ait akış diyagramı - 2 ...78
Şekil 3.13 Görüntü üzerindeki bir alanın sayısal ifadesi ...79
Şekil 3.14 Maskenin üzerinde bulunduğu piksellerin sayısal değerleri...80
Şekil 3.15 Entropi karşılaştırma yöntemine ait akış diyagramı - 1 ...81
Şekil 3.16 Entropi karşılaştırma yöntemine ait akış diyagramı - 2 ...82
Şekil 3.17: Ortalama değer karşılaştırma yöntemine ait akış diyagramı - 1 ...84
Şekil 3.18 Ortalama değer karşılaştırma yöntemine ait akış diyagramı - 2 ...85
Şekil 3.19 Ortalama değer karşılaştırma yöntemine ait akış diyagramı - 3 ...86
Şekil 3.20 L*a*b* renk uzayı...87
Şekil 3.21 Lab ortalama yöntemine ait akış diyagramı - 1 ...88
Şekil 3.22 Lab ortalama yöntemine ait akış diyagramı - 2 ...89
Şekil 3.23 Lab ortalama yöntemine ait akış diyagramı - 3 ...90
Şekil 3.24 Lab etiketleme yöntemine ait akış diyagramı - 1...92
Şekil 3.25 Lab etiketleme yöntemine ait akış diyagramı - 2...93
Şekil 3.26 Lab etiketleme yöntemine ait akış diyagramı - 3...94
Şekil 3.27 Renk sayısı düşürülmüş indeksli görüntü...95
Şekil 3.28 Histogram eşitleme yapılmış görüntü...95
Şekil 3.29 Renk haritalama yöntemine ait akış diyagramı - 1...97
Şekil 3.30 Renk haritalama yöntemine ait akış diyagramı - 2...98
Şekil 3.31 Renk haritalama yöntemine ait akış diyagramı - 3...99
Şekil 3.32: HSI renk modeli ...101
Şekil 3.33 Referans alana ait H matrisinin histogramı. ...102
Şekil 3.34 HSI histogram karşılaştırma yöntemine ait akış diyagramı - 1 ...103
ix
Şekil 3.36 HSI histogram karşılaştırma yöntemine ait akış diyagramı - 3 ...105
Şekil 4.1 Tez çalışmasında kullanılan mobil robot...106
Şekil 4.2 Yakalanan dairesel görüntü ...107
Şekil 4.3 Şekil 4.2’deki görüntüye ait açılmış panoramik görüntü ...107
Şekil 4.4 Yakalanan dairesel görüntü ...108
Şekil 4.5 Şekil 4.4’deki görüntüye ait açılmış panoramik görüntü ...108
Şekil 4.6 Yakalanan dairesel görüntü ...109
Şekil 4.7 Şekil 4.6’daki görüntüye ait açılmış panoramik görüntü ...109
Şekil 4.8 w genişliğindeki bir görüntüde cisim veya koridor olarak belirlenen ve çizelgede gösterilen wx noktaları. ...110
Şekil 4.9: Dönüştürülmüş panoramik görüntü ve entropi karşılaştırma yöntemiyle zemin tespiti yapılmış görüntü ...111
Şekil 4.10 Şekil 4.9’daki görüntünün zemin sınırları ...111
Şekil 4.11 Şekil 4.10’daki diziye alçak geçiren filtre uygulanması ...112
Şekil 4.12 Dönüştürülmüş panoramik görüntü ve entropi karşılaştırma yöntemiyle zemin tespiti yapımış görüntü ...112
Şekil 4.13 Dönüştürülmüş panoramik görüntü ve ortalama değer yöntemiyle zemin tespiti yapılmış görüntü...113
Şekil 4.14 Şekil 4.13’teki görüntünün zemin sınırları...114
Şekil 4.15 Şekil 4.14’teki diziye alçak geçiren filtre uygulanması ...114
Şekil 4.16 Dönüştürülmüş panoramik görüntü ve ortalama değer yöntemiyle zemin tespiti yapılmış görüntü...115
Şekil 4.17 Şekil 4.16’daki görüntünün zemin sınırları ...115
Şekil 4.18 Şekil 4.17’deki diziye alçak geçiren filtre uygulanması ...116
Şekil 4.19 Dönüştürülmüş gürültülü bir panoramik görüntü ve zemin tespiti yapılmış görüntü. Desenlilik arttığı için zemin tespiti sağlıklı yapılamamıştır...116
Şekil 4.20 Dönüştürülmüş panoramik görüntü ve lab komşuluk yöntemiyle zemin tespiti yapılmış görüntü...117
Şekil 4.21 Şekil 4.20’deki görüntünün zemin sınırları ...117
Şekil 4.22 Şekil 4.21’deki diziye alçak geçiren filtre uygulanması ...118
Şekil 4.23 Şekil 4.20’deki görüntüye ait a değeri...118
Şekil 4.24 Şekil 4.20’deki görüntüye ait b değeri ...119
Şekil 4.25 Dönüştürülmüş panoramik görüntü ve lab komşuluk yöntemiyle zemin tespiti yapılmış görüntü...119
Şekil 4.26 Şekil 4.25’teki görüntünün zemin sınırları...120
Şekil 4.27 Şekil 4.26’daki diziye alçak geçiren filtre uygulanması ...120
Şekil 4.28 Dönüştürülmüş panoramik görüntü ve lab komşuluk yöntemiyle zemin tespiti yapılmış görüntü...121
Şekil 4.29 Şekil 4.28’deki görüntünün zemin sınırları ...121
x
Şekil 4.31 Dönüştürülmüş panoramik görüntü ve lab etiketleme yöntemiyle zemin
tespiti yapılmış görüntü...123
Şekil 4.32 Dönüştürülmüş panoramik görüntü ve lab etiketleme yöntemiyle zemin tespiti yapılmış görüntü...123
Şekil 4.33 Renk haritası yöntemi uygulanan panoramik görüntü. ...124
Şekil 4.34: Renk haritası yöntemiyle Şekil 4.33’teki görüntüden elde edilen sonuç. ...124
Şekil 4.35 Renk haritası yöntemi uygulanan panoramik görüntü. ...125
Şekil 4.36 Renk haritası yöntemiyle Şekil 4.35’teki görüntüden elde edilen sonuç 125 Şekil 4.37 Görüntü üzerinde referans olarak seçilen alan...126
Şekil 4.38 Referans alanın H matrisine ait histogram ...126
Şekil 4.39 Referans alanın S matrisine ait histogram ...127
Şekil 4.40 Referans alanın I matrisine ait histogram ...127
Şekil 4.41 Şekil 4.37’deki açılmış görüntüye histogram karşılaştırma yöntemi uygulandıktan sonra elde edilen zemin görüntüsü ...127
Şekil 4.42 Şekil 4.41’deki görüntünün zemin sınırları ...128
Şekil 4.43 Şekil 4.42’deki diziye alçak geçiren filtre uygulanması ...128
Şekil 4.44 Görüntü üzerinde referans olarak seçilen alan...129
Şekil 4.45 Şekil 4.44’teki açılmış görüntüye histogram karşılaştırma yöntemi uygulandıktan sonra elde edilen zemin görüntüsü ...129
Şekil 4.46 Görüntü üzerinde referans olarak seçilen alan...129
Şekil 4.47 Şekil 4.46’daki açılmış görüntüye histogram karşılaştırma yöntemi uygulandıktan sonra elde edilen zemin görüntüsü ...130
Şekil 4.48 Şekil 4.47’deki görüntünün zemin sınırları ...130
Şekil 4.49 Şekil 4.48’deki diziye alçak geçiren filtre uygulanması ...130
Şekil 4.50 Görüntü üzerinde referans olarak seçilen alan...131
Şekil 4.51 Şekil 4.50’deki açılmış görüntüye histogram karşılaştırma yöntemi uygulandıktan sonra elde edilen zemin görüntüsü ...131
Şekil 4.52 Şekil 4.51’deki görüntünün zemin sınırları ...132
Şekil 4.53 Şekil 4.52’deki diziye alçak geçiren filtre uygulanması ...132
Şekil 4.54 Görüntü üzerinde referans olarak seçilen alan...133
Şekil 4.55 Şekil 4.54’teki açılmış görüntüye histogram karşılaştırma yöntemi uygulandıktan sonra elde edilen zemin görüntüsü ...133
Şekil 4.56 Şekil 4.55’teki görüntünün zemin sınırları...133
xi
ÇĐZELGE LĐSTESĐ
Çizelge 2.1 Ayna türlerinin karşılaştırılması (Potucek 2006) ...26 Çizelge 2.2 Katadioptrik sistemlerin sınıflandırılması ...26 Çizelge 4.1 Şekil 4.11 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...112 Çizelge 4.2 Şekil 4.15 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...114 Çizelge 4.3 Şekil 4.18 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...116 Çizelge 4.4 Şekil 4.22 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...118 Çizelge 4.5 Şekil 4.27 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...120 Çizelge 4.6 Şekil 4.30 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...122 Çizelge 4.7 Şekil 4.43 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...128 Çizelge 4.8 Şekil 4.49 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...131 Çizelge 4.9 Şekil 4.53 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal
değerleri ...132 Çizelge 4.10 Şekil 4.57 için cisim ve koridorların görüntü üzerindeki gerçek ve açısal değerleri ...134
1 GĐRĐŞ
Son yıllarda mobil robot teknolojisinin oldukça önemli gelişmeler göstermesiyle birlikte mobil robotların kullanım alanları da artmıştır. Başlangıçta endüstriyel amaçlı robotlar tasarlanmışsa da bugün günlük hayatımızda pek çok alanda otonom mobil robot uygulamalarını görmekteyiz. Otonom mobil robotlar, zorluğu ya da güvenlik riski nedeniyle yapmaktan kaçınılan işlemler için tasarlanmıştır. Aynı kazançta daha az çalışarak iş yapmak ve böylece kapasiteyi artırmak; işlemi kolay, hızlı ve her adımda kontrol edilebilir hale getirebilmek için mobil robot kullanmak artık hayatın gereklerinden olmuştur. Güvenlik amaçlı izleme yapan robotlar, fabrikalarda, marketlerde, hastanelerde, havaalanlarında hatta evlerde temizlik yapan robotlar, yine fabrikalarda endüstriyel taşıma amaçlı kullanılan AGV’ler (Automated Guided Vehicle – Otomatikleşmiş Güdümlü Araç), hastanelerde ilaç dağıtan hemşire robotlar, spor müsabakalarında kullanılan otonom mobil robotlar bunlardan sadece bazılarıdır. Bahsedilen bu mobil robotlar işlem hızını arttırdığı için kısa zamanda daha çok iş yapabilmekte ve istihdamı insana göre daha ucuz olduğu için maddi açıdan da çok büyük kazanç sağlamaktadır.
Elektronik, sürüş sistemi, görme sistemi, haberleşme sistemi gibi alanların tamamında yaşanan hızlı gelişmeler bugün mobil robotu çok farklı bir noktaya taşımıştır. Özellikle görme sistemlerinin artık değişik biçimlerde uygulanabiliyor olması navigasyon alanında büyük gelişmeler sağlamış ve birçok alternatif uygulamayı da beraberinde getirmiştir. Navigasyon, mobil olması amaçlanan her robot için kritik ve yerine getirilmesi bir o kadar zor bir fonksiyondur. Başlangıçta yapılan çalışmalar durağan ortamlar için olmuştur. Bu uygulamalarda, mobil robot daha önceden belirlenmiş bir rota üzerinde hareket etmek zorundadır. Ancak birçok uygulamada robotun çalıştığı çevre dinamiktir ve robotun önceden belirlenen rota üzerinde hareket etmesi istenilen görevi yerine getirememesine veya ortamda bulunan cisimlerle çarpışmasına sebep olabilir. Robot dinamik ortamda önüne çıkacak engelleri algılayabilmeli ve ortamda oluşabilecek değişikliklerden etkilenmeden hedefe ulaşabilmelidir. Buradaki temel hedef mobil robotun bulunduğu
ortam içinde diğer nesnelerle çarpışmasını önleyerek robotu en güvenli ve en hızlı şekilde hareket ettirmektir.
1.1 Mobil Robotlarda Görme
Robotik çalışmalarında seyir ve konumlama konularına artık daha fazla önem verilmeye başlanmıştır. Eski mobil robotlar, algılayabildikleri cisimlerden yayılan ultrasonik dalgaları ölçerek mesafe tayini yapan ultrasonik sensör dizileriyle donatılıyordu. Günümüzde ise mobil robotlar kesin mesafe bilgisi verebilen laser mesafe bulucularla donatılmaktadır. Laser mesafe bulucular mobil robotlar için iki hatta üç boyutlu ve de tam doğru olan çalışma alanı haritaları çıkartabilmektedir. Bununla birlikte tam doğru mesafe bilgisi dahi mobil robot için bazen aydınlatıcı olmayabilir. Çünkü robotun çalışma alanındaki çoğu farklı yerin küçük bir geometrik yapısı olabilir. Ayrıca bugün laser mesafe ölçüm sensörleri oldukça pahalıdır (Bunschoten 2003).Bu sebeplere ilave olarak robotların daha hızlı hareket etmesi ve çabuk yön değiştirmesi, daha iyi çevre algılamasını gerektirmiş ve bu da daha fazla sensör kullanımını beraberinde getirmiştir. Maliyetin artmış olması ve ihtiyacın karşılanamaması daha gelişmiş ve daha ucuz yöntemlerin arayışına sebep olmuştur. Son zamanlarda görme sensörleri, diğer sensörlere kıyasla ucuz olmaları ve çevre hakkında daha fazla bilgi verebilmeleri nedeniyle mesafe bulma sensörlerine göre daha çok tercih edilmeye başlanmıştır (Nagahara ve ark. 2003). Bir kamera görüntüsü, gözlemlenen ortam hakkında ultrasonik, lazer ve infra-red sensörlere göre oldukça tatmin edici bilgi vermektedir ve ayrıca konumlama için çok daha kullanışlıdır. Çünkü mesafe ölçüm sensörleri yerine kamera kullanmak, ortam hakkında aynı anda çok daha fazla bilgiye ulaşmayı; ortamı daha iyi analiz etmeyi sağlar.
Birçok mobil robot yolunu bulmak ve sabit veya hareketli nesnelerden sakınmak için sadece ön tarafını görür. Sonuç olarak arkasından veya yanından yaklaşan hareketli nesnelerle çarpışabilir. Nitekim mobil robotun hareket edeceği ortamda robot dışında hareket eden başka nesneler veya başka mobil robotlar olabilir. Görsel bilgi, otonom seyrin güvenliği için çok önemlidir. Güvenlik için,
robot her yönden yaklaşan hareketli nesnelerden sakınmalıdır. Dolaysıyla bu nesnelerin algılanması da görsel sensörler kullanılarak yapılabilir (Yamazawa ve ark. 1995).
Başlangıçta, üzerine sadece hareket yönünü gören tek kamera yerleştirilmiş robotlar üzerinde çalışılmıştır. Sıradan video kameralar, onları kısıtlayan sınırlı görüş alanına sahip oldukları için bazı uygulamalarda yetersiz veya verimsiz kalmıştır (Nayar 1997). Bu yüzden ilk olarak, daha geniş görüş alanına sahip görüntü elde etmek için geniş açılı lensler, çok kameralı sistemler, görüntü alırken dönen kameralar, balık gözü kameralar; ikinci olarak ise robot etrafında 360° panoramik görüntü elde etmek için eğrisel aynalı sistemler kullanarak son 15 yılda bir çok literatür çalışması ve uygulama yapılmıştır (Kondo ve ark. 2005, Barth ve Barrows 1996). Son zamanlarda kapalı ofis ortamlarında tümyönlü kamera kullanan robotların konumlaması üzerine yapılan çalışmalar da giderek artmıştır.
1.2 Tümyönlü Görüş
Sıradan kameralar nispeten daha dar görüş alanına sahiptirler. Bu kameralar örneğin bir PTZ ( Pan Tilt Zoom - Tabla Döndürme Eğme Büyütme) düzenek kullanarak hedefe yönelirler ya da gövdelerini hedefe çevirmeleri gerekir. Son zamanlarda, sadece robotik alanında değil birçok alanda tümyönlü görüşe ilginin giderek arttığı söylenebilir. Bazen panoramik görüş olarak da adlandırılan tümyönlü görüş, teknik olarak birçok farklı yolla elde edilebilir. Örneğin son derece geniş açılı lensler kullanarak, standart lens önüne farklı yapıda ayna monte edilmiş kameralar kullanarak (katadioptrik sistemler), küre benzeri bir şeklin etrafına dizilmiş kameralar veya bir eksen etrafında dönen standart bir kamera kullanarak geniş görüş açılı sistemler oluşturulabilir. Tümyönlü görüş kullanışlı özelliklere sahip, 360°’ lik çok geniş bir görüş alanı sunar (Potucek 2006).
Bu teknikler içinde en çok ilgi göreni katadioptrik sistemlerdir. Katadioptrik sistemde cisimden uzaya yayılan ışınlar bir ayna tarafından yansıtılır, birkaç lens kombinasyonundan geçirildikten sonra görüntüleme aracı olan kamera sensörü tarafından ölçülür. Özellikle kamera lensi farklı yönlerdeki ışınları toplayıp görüntü
düzlemine düşürdükten sonra görüntüleme sensörü, görüntü düzlemi olarak adlandırılan kısım üzerindeki her bir bölümün ışık enerjisi miktarını ölçer. Işığın toplandığı bu yöntem projeksiyon model olarak tanımlanır. En iyi bilinen projeksiyon modeli her ölçülen ışının, projeksiyon merkezi olarak da bilinen tek bir görüş noktasından geçtiği perspektif projeksiyondur. Çoğu kamera sistemi perspektif projeksiyon kullansa da bazı kamera sistemleri ortografik projeksiyon sağlayan telesentrik lense sahiptir. Ortografik projeksiyon, sadece kamera merkez hattına paralel olan ışınları geçirir (Ortiz 2004).
1.3 Kaynak Araştırması
Daha önceki yıllarda ayna ve kamera kullanılarak geniş görüş açılı sistemler oluşturmak için çalışmalar olmuşsa da literatüre geçmiş tek bir simetrik ayna ile 360 derece görüş sağlayan ilk tümyönlü görüş sistemi 1970’te Rees, tarafından gerçekleştirilmiş ve Amerikan patent enstitüsünden patent almıştır (Rees 1970). Bu sistem kapalı bir araç içinde bulunan operatörün bir monitör yardımıyla tümyönlü görüş sisteminden gelen görüntüyü kullanarak aracı hareket ettirebilmesi için geliştirilmiştir. Tümyönlü görüş sisteminin donanım kısmı oluşturulmuş olsa da görüntü işlemede kullanılan mikroişlemcilerin o yıllarda düşük hıza sahip olması bu alandaki çalışmaların bir süre duraksamasına neden olmuştur (Benosman ve Kang 2001).
1990’larda bilgisayar teknolojisinin hızla gelişmesi ve gerçek zamanlı görüntü işleme hızının artması, araştırmacıları tekrar bu alana çekmiştir. Yagi ve ark 1991 yılında yaptıkları çalışmalarında, konik ayna ve perspektif lensten oluşan sensörü ve bu sensörün bir mobil robotun seyrinde uygulamasını anlatmışlardır. Her ne kadar panoramik görüntü elde edilse de tek görüş noktası olmaması sistemin olumsuzluklarındandır. Robotun ve ortamdaki diğer hareketli nesnelerin sabit doğrusal hareket ettikleri varsayılarak ufuk açısı değişiklikleri görüntülenmiş ve kesişme yolu boyunca hareket eden nesneler tespit edilmiştir. Eğer hareketli nesneler bulunduysa robotun hızı değiştirilerek bu kesişmelerden sakınması sağlanmıştır. Aynı zamanda robotun çevre haritası çıkartılmıştır. Bu haritadan faydalanılarak
robotun bulunduğu ortamdaki konumlaması yapılmıştır. Bu çalışmada her bir nesnenin hareketli veya sabit olması, nesnelerin tahmin edilen konumu ve hızı, robotun hızını değiştirebilmektedir. Çalışmada konik projeksiyon kullanılması konumlama yapılırken yüksek derecede doğruluk sağlamış ve sadece düşey kenarlarla çalışıldığından diğerlerine göre daha hızlı olmuştur.
1992’de Hong ve ark. yaptıkları çalışmada küresel ayna kullanan bir tümyönlü görüş sistemi geliştirdiler. Bu sistem bir mobil robot üzerinde kullanılmıştır. Gerçekleştirilen uygulamada görüntü tabanlı hedef bulma üzerine çalışılmıştır. Kapalı ortamda gerçekleştirilen deneylerde robotun belirlenen noktaya tümyönlü görüntüyü kullanarak gitmesi amaçlanmıştır.
Yagi ve ark. 1992 yılında gerçekleştirmiş oldukları çalışmalarında üzerinde COPIS (Conic Projection Image Sesnsor - Konik Yansımalı Görüntü Sensörü) bulunan bir mobil robot kullanmışlardır. COPIS’in en büyük özelliği çevrenin tümyönlü görüntüsünü pasif olarak algılamasıdır. Burada gerçek zamanlı olarak tümyönlü görüntü içindeki her bir nesnenin ufuk açısı hesaplanıp robotun bulunulan ortamda güvenli seyretmesi amaçlanmıştır. Bu ufuk değeri verilen çevresel harita ile eşleştirilmiştir. COPIS, 360 derece görüş sağladığı için robot tam olarak kendi konumunu ve hareketini yani robotun hızını hesaplayabilmektedir.
Yamazawa ve ark. 1995 yılında görüntü tabanlı mobil robot seyrinde kullanılmak üzere hiperbolik kesitli bir ayna kullanan görüntü sensörü oluşturmuşlardır. Gerçekleştirilen sistem hyperOmni Vision adı verilen sensörün, gerçek zamanlı olarak ilettiği tümyönlü görüntü bilgisini kullanarak bilinmeyen nesneleri bulmada ve robotun hareketini hesaplamada kullanılmıştır. Çalışmada hiperbolik ayna kullanıldıktan sonra küresel ve konik aynaya ait özellikleri bir arada bulundurduğu için ve görüntü dönüşümü daha kolay yapıldığı için diğer ayna türlerine göre daha kullanışlı olduğu sonucuna varılmıştır.
1997 yılında Nayar “katadioptrik tümyönlü kamera” adı altında yaptığı çalışmada, balıkgözü lensler, döner kameralı sistemler gibi geleneksel geniş görme sistemlerinden bahsetmiş ve katadioptrik sistemle kıyaslamasını yapmıştır. Çalışmada kullanılan katadioptrik sistemde paraboloidal ayna kullanılmıştır. Video telekonferans, uzaktan izleme ve otonom seyirde kullanılmak üzere farklı yapıda
sistemler geliştirilmiştir. Paraboloidal ayna kullanıldığı için parametrelerinin az olmasından dolayı kalibrasyon daha kolay yapılmış ancak görüntü elde etmek için kamera önünde telesentrik lens kullanılması maliyeti yükseltmiştir.
1998’de Ishiguro düşük maliyetli tek parça görüş sistemlerinin geliştirilmesi ve uygulamaları üzerine çalışmıştır. Yapılan çalışmada kullanılabilecek ayna türleri incelenmiş avantaj ve dezavantajları kıyaslanmış ve sistemin nasıl tasarlanması gerektiği anlatılmıştır. Ayna ile birlikte kullanılacak aparatların yerleştirilmesi, aynaların üretilmesi ve dahili yansımaların ortadan kaldırılması için yapılabilecek işlemlerden bahsetmiştir.
Yine 1998 yılında Nayar ve Baker, “Katadioptrik Görüntü Oluşumu Teorisi” adı altında bir çalışma yapmışlardır. Yapılan bu çalışma daha öncekileri de kapsar nitelikte olup katadioptrik sensörlerin üç ölçütü üzerine çalışılmıştır. Bunlardan birincisi kullanılan aynanın şeklidir. Değişik yapıda ayna şekilleri incelenmiş ve bu aynaların sabitlenmiş görüş noktası ve efektif pinhole göre optik kanunları da göz önünde bulundurularak kesit denklemleri çıkartılmıştır. Çıkartılan bu denklemler aynı zamanda aynanın parametrelerini de belirlemektedir. Đkinci olarak ise kameraların çözünürlüğü üzerine çalışılmıştır. Bir katadioptrik sistemde kamera çözünürlüğünü belirleyen denklem oluşturulmuş ve bu denkleme bakılarak kamera çözünürlüğünü etkileyen faktörler ortaya konulmuştur. Sonuncu alan ise kameranın odak ayarlarıdır. Görüntünün aynadan yansıdıktan sonra geçeceği lens ile ilgili denklemler çıkartılmış ve lensin efektif görüş noktasına olan uzaklığındaki değişime bakılarak yorum yapılmıştır.
Gaspar ve ark. 2000 yılında “Tümyönlü Kamera ile Görme Tabanlı Seyir ve Çevresel Betimleme” isimli bir çalışma yapmışlardır. Bu çalışmada bir mobil robotun kapalı ortamda tek bir tümyönlü kamera kullanarak görme tabanlı seyri amaçlanmıştır. Bu çalışmada özellikle perspektif etkiler ortadan kaldırılarak, seyirle ilgili problemler basit bir şekilde ele alınmaya çalışılmıştır. Topolojik seyir ve görsel yol takibi olmak üzere iki tür seyir modeli üzerine çalışılmıştır. Robotun kesin yer bilgisinin gerekmediği uzun mesafeli hareketleri için topolojik seyir ve kapıdan geçme, bir yere yanaşma gibi yerel ve hassas seyir gereken yerlerde görsel yol takibi metodu uygulanmıştır. Bu iki seyir sisteminin birbirinden ayrı olarak ele alınıp farklı
problemler için farklı seyir metodlarının uygulanmasıyla daha güçlü bir seyir sistemi oluşturulmuştur.
2001 yılında Lin ve Bajcsy, “Tek Görüş Noktalı Konik Aynalı Tümyönlü Katadioptrik Sistem” adı altında bir çalışma yapmışlardır. Daha önce Nayar ve Baker, yapmış oldukları çalışmalarda elde ettikleri denklemlere dayanarak hangi ayna türlerinde nasıl kurulum yapılırsa sistemin tek görüş noktalı olarak çalışacağını; aksi takdirde tek görüş noktalı olmayacağını ispat etmişlerdir. Konik aynalı sistemlerin de tek görüş noktalı olabilmesi için denklemlere dayanılarak elde edilen sonuçlardan teorik olarak kamera deliğinin koninin tam tepe noktası ile çakışması gerektiğini söylemişlerdir. Böyle bir sistem oluşturulduğunda kamera deliğinden sadece ayna düzlemine teğet geçen ışınların girebileceği; diğer ışınların giremeyeceği dolaysıyla görüntünün oluşmayacağı belirtilmiştir. Bu yüzden de konik aynalı sistemlerin tek görüş noktalı geniş görüş alanlı kamera yapımı için uygun olmadığını savunmuşlardır. Ancak daha sonra teorik kurallara sadık kalınarak yapılan bu çalışmada böyle bir sistemin oluşturulmasının mümkün olduğu görülmüştür. Oluşturulan teori çerçevesinde, geliştirilen prototip sistemle yapılan deneyler teorik tahminleri doğrulamıştır. Toplam görüş alanı daha küçük fakat daha yüksek çözünürlüklü olmuştur. Ayrıca sistemde konik ayna kullanılması imalatı kolaylaştırmış ve maliyeti de düşürmüştür.
2003 yılında Bunschoten ve Kröse, “Tümyönlü Görüntüden Görsel Konum Tahmini” ismiyle bir çalışma yapmışlardır. Deneysel çalışmalar hem simulasyon ortamında hem de gerçek ortamda gerçekleştirilmiştir. Yapılan bu çalışmada tümyönlü görüş sisteminden alınan görüntü kullanılarak robotun ardı sıra gelen iki konumu arasında dönme ve mesafe değişimini tahmin etmek için bir metod geliştirilmiştir. Çalışma neticesinde bir mobil robotta tekerleklerden alınan enkoder bilgisi yerine tümyönlü görüş sistemi kullanılarak konum değişikliğinin tahmin edilmesinin de başarılı bir yöntem olduğu ortay konmuştur.
Negishi ve ark. 2004 yılında gerçekleştirmiş oldukları çalışmalarında tümyönlü stereo bir sistemin kalibrasyonu üzerine çalışmışlardır. Sistem içinde iki adet hiperbolik ayna ve iki adet kamera kullanılmıştır. Kalibrasyon iki aşamada gerçekleştirilmiştir, birinci adım görüntü merkezini ve dairesel görüntü sınırlarını
bulmak, ikincisi ise odak uzaklığı ve kamera konumunun belirlenmesi şeklinde olmuştur.
Kondo ve ark. 2005 yılında yapmış oldukları bu çalışmalarında izotropik olmayan tümyönlü görüş sistemi üzerine çalışmışlardır. Gerçek zamanlı tümyönlü bir görüntüleme sisteminde konveks bir ayna ve optik eksene dik olarak yerleştirilmiş bir kamera kullanılır ve optik kanunları gereği açısal çözünürlük ufuk açısından bağımsızdır. Bunun yanında bir mobil robotun yolu üzerindeki nesneleri algılaması ve sakınması çok önemlidir. Bu nedenle bu çalışmada robotun hareket ettiği yöndeki açısal çözünürlüğün yanal görüşlerden daha yüksek olması gerektiği savunulmuş ve bir mobil robotun seyri için izotropik olmayan tümyönlü görüş sistemi tasarlanmıştır. Baştanlar ve Yardımcı 2005 yılında yaptıkları çalışmalarında tümyönlü görüntüleme sistemlerinden elde edilen görüntüleri incelemiş ve hiperbolik aynalı tümyönlü görüş sistemlerinin parametrelerinin bulunması üzerine çalışmışlardır. Cisimlerin gerçek dünya koordinatları ve tümyönlü imge üzerindeki eşlenikleri kullanılarak bilinmeyen ayna parametrelerini bulmak için en iyileme yapılmıştır.
Vanijja ve Horiguchi 2006 yılında yapmış oldukları çalışmada iki adet tümyönlü görüntüleme sistemi kullanarak tümyönlü stereoskopik görüntü elde etmişlerdir. Panoramik stereoskopik görüntü 360° bakış alanında stereo görüntü algılamayı sağlar. Burada iki görüntü sağ ve sol göz gibi düşünülmüştür.
Menegatti ve ark. 2006 yılında yapmış oldukları çalışmalarında dinamik ortamlarda hareket kabiliyeti olan robotlar için tümyönlü görüntü kullanılarak konumlama yapılmasından bahsedilmiştir. Burada kullanılan farklı bir metot vardır. Tümyönlü görüntüleme sistemi çevredeki en yakın bulunan renk geçişlerinin robota olan uzaklığını bulur. Konumlamanın daha düşük maliyetli donanımla gerçek zamanlı olarak yapılması hedeflenmiştir.
2006 yılında Lin ve Bajcsy, 2001 yılında yaptıkları çalışmayı pekiştirir nitelikte bir çalışma yapmışlardır. Bu çalışma da yine tek görüş noktalı konik aynalı katadioptrik görüntüleme sistemi üzerine olmuştur. Yapılan çalışmada konik aynalı ideal bir katadioptrik sistemin nasıl oluşturulacağı anlatılmış, sistemin avantajlarından ve dezavantajlarından bahsedilmiştir. Kamera deliğinin ve lensinin konik aynanın tepe noktasına yerleştirilmesiyle elde edilebilen tek görüş noktalı
sistemde oluşan astigmatizm problemi, kameranın daha uzağa yerleştirilip araya bir lens konulmasıyla giderilmiş ve daha net görüntü elde edilmiştir. Ayrıca çalışma sonunda sisteminin kalibrasyonunun nasıl yapıldığı da gösterilmiştir. Konik aynanın diğer ayna tiplerine göre daha kolay imal edilmesi ve yataya yakın bölgelerde yüksek çözünürlüklü görüntü vermesi aynanın avantajları arasında gösterilirken, yüksek astigmatizm ve dar görüş alanına sahip olması dezavantajları olarak belirtilmiştir.
Yoshida ve ark. 2006 yılında yaptıkları çalışmada, elde edilen tümyönlü görüntüde sabit çözünürlük ve tek görüş noktasının tümyönlü görüş sensörlerindeki önemini vurgulamışlardır. Tek görüş noktalı katadioptrik sistemlerin sabit çözünürlüklü görüntü vermemesi ya da sabit çözünürlüklü görüntü elde edilebilen sistemlerin tek görüş noktasına sahip olmamasının dezavantajlarına değinmişler ve her iki özelliği de bir arada bulunduran özel bir katadioptrik sistem tasarlamışlardır. Tasarladıkları sistemde iki adet konveks ayna kullanmışlardır.
Maeda ve Idou 2007 yılında yapmış oldukları çalışmalarında çoklu tümyönlü görüş sistemlerinin çalışması üzerinde durmuşlardır. Sistemden alınan üç adet tümyönlü görüntü kullanılarak nesnenin robotlara olan uzaklığı ve konumlandırılması amaçlanmıştır. Yapılan bu çalışma soccer robotlar üzerinde uygulanmıştır. Pozisyon belirleme sırasında kesin yerleri belirli olan işaretler kullanılmıştır
2 TÜMYÖNLÜ GÖRÜŞ SĐSTEMLERĐ
Tek bir imgeyi analiz ederek 360° görüntüleme sağlayan tümyönlü görüntüleme sistemlerine ilişkin uygulamalar özellikle üretimin kolaylaşması ve görüntü işleme hızının artması, görsel sensörlerin pasif sensörler olması yani diğer sensörlerin çalışmasından etkilenmemesi nedeniyle son yıllarda önemli bir artış ve gelişme göstermiştir (Bunschoten 2003).
Giderek popüler olan tümyönlü görüş sistemleri video konferanslar, uzaktan izleme, mobil robotlarda navigasyon, güvenlik sistemleri gibi birçok alanda kullanılmaktadır. Tümyönlü görüş gerçekte 360° küresel görüş sağlıyor ise de tümyönlü görüş terimi silindirik, geniş açılı ve yarı küresel görüntülemeden söz etmek için de kullanılır. Bir tümyönlü görüş alanı, çoklu kameradan alınan görüntüleri birleştirerek, dönen tek bir kameradan alınan görüntüleri birleştirerek, geniş açılı balıkgözü lens kullanarak ve katadioptrik olarak bilinen, ayna ve lens kombinasyonu ile görüntü almayı sağlayan teknik kullanılarak oluşturulabilir. Bu dört teknik içinde tek kamera kullanan katadioptrik sistemler geniş küresel görüşü olması nedeniyle tümyönlü görüş için en çok kullanılan sistemlerdir (Ortiz 2004).
Sıradan görüntüleme sistemleri oldukça sınırlı görüş alanına sahiptirler. Sadece kameranın baktığı doğrultudaki dar ve sabit bir açıyı görebilirler. Bu problemi hafifletmek için PTZ kameralar sık sık kullanılır. Her ne kadar bu kameralar kameranın görüş açısını uzaktan değiştirmeye müsaade etse de görüş alanı oldukça sınırlı kalır. Kısacası sıradan kameralar görüş alanlarından çok daha büyük kör alanlara sahiptirler (Potucek 2006).
Đyi bir görüntüleme sisteminde arzu edilen özellikleri aşağıdaki gibi belirtebiliriz.
• Geniş görüş alanı
• Değişken çözünürlük. Daha fazla kullanılacak görüş alanlarında daha çok piksel olması
• Tek Görüş Noktası. Tek görüş noktası manzara hakkında daha tutarlı bilgi verir ve sağlıklı perspektif görüntü almayı mümkün kılar.
• Basit ve sağlam kalibrasyon
• En az donanım. Mobil görüntüleme sistemleri küçük, kompakt ve düşük enerjide çalışır olmalıdır (Derrien ve Konolige 2000).
Sıradan görüntüleme sistemlerinin oldukça sınırlı görüş alanına sahip olmaları, bazı uygulamalarda bu sistemlerin yetersiz kalmasına ve daha geniş görüş alanına sahip görüntüleme sistemlerinin ortaya çıkmasına neden olmuştur.
1986’da Cao, balıkgözü lensle geniş görüş üzerine çalışan ilk araştırmacı olmuştur. Bozulmuş bir panoramik görüntü elde etmiştir. 1993’te Ishiguron farklı yöne bakan dört kamera kullanarak farklı bir metod geliştirmiştir. Şimdi ise tümyönlü sensörler genelde bir monoküler kamera ve konik yansıtıcının birleşimine dayanmaktadır (Brassart ve ark. 2000).
Şekil 2.1 Bazı görüş sistemlerine ait görüş alanları
Geniş görüş alanlı sistemleri dört kategoride toplayabiliriz.
1. Balıkgözü lensler. Özel tasarlanmış lenslerdir ve bazıları yarımküreye yakın görüş alanı sunarlar.
2. Mekanik tarayıcılar. Panoramik görüntü elde edebilmek için tek eksen etrafında dönerek görüntü alan sistemlerdir.
3. Çoklu kameralar. Birden fazla kamera görüntüsü birleştirilerek panoramik görüntü elde eden sistemlerdir (Shimizu ve ark. 2005). 4. Katadioptrik sistemler. Bu sistemlerde tümyönlü görüntüleme için
ayna ve lens birleşimi kullanılır (Derrien ve Konolige 2000).
2.1 Balıkgözü Lensler
Balıkgözü lensler sıradan kameralardaki görüş alanını genişletmek için ve genellikle ölçme görevlerinde kullanılır. Başlangıçta gökcisimlerinin yerlerini belirleme, bulutların dağılımının analizi ve dökümantasyonu gibi meteorolojik ve astronomik çalışmalar için tasarlanmıştır. Ayrıca uzun yıllar 180° balıkgözü lens kullanarak ekosistemdeki solar radyasyonun ölçümü için küresel fotoğraflar kullanılmıştır (Schwalbe 2005).
Şekil 2.2 Fotoğraf makinası önüne takılmış bir balıkgözü lens (Nikon)
Bunların dışında bugün genel amaçlı fotoğrafçılıkta ve bazı bilimsel çalışmalarda da balıkgözü lensler kullanılmaktadır. 180°nin üzerinde görüş açısı sağlayan balıkgözü lensler mevcuttur. Bunun için özel üretilmiş mercekler kullanılır. Bu yüzden fiyatı da oldukça yüksektir. Balıkgözü lenslerle alınan görüntülerde bir miktar distorsiyon olur. Bunların kalibrasyonlarının iyi yapılması gerekir. Balıkgözü lenslerin kalibrasyonu üzerine bir çok literatür çalışması yapılmıştır. Balıkgözü lenslerle normal lensler arasındaki en temel farklardan biri, normal lenslerle
perspektif görüntü elde ederken; balıkgözü lenslerde üç boyutlu uzaydan iki boyutlu düzleme düşürülen görüntünün perspektif olmamasıdır (Xiong ve Turkowski 1997).
Optik Eksen
Görüntü Düzlemi
Şekil 2.3 Balıkgözü lensin içyapısı
Balıkgözü lenslerdeki temel yapı genellikle yukarıdaki gibidir. En dışta bulunan mercekler, lensin görüş açısını belirlemede en önemli rolü oynarlar. Çaplarına, dış ve iç eğriliklerine bağlı olarak ışığı belirli oranda kırarak bir sonraki lense iletirler. Şekilde de görüldüğü gibi balıkgözü şeklindeki bu lensler dağınık gelen ışınları odaklayacak yapıdadırlar. Daha sonraki katmanlara yerleştirilmiş lensler, balıkgözü şeklindeki lenslerden geçtikten sonra kısmen dağılmış olan ışınların daha düzgün ve paralel olarak en içteki lenslere iletilmesini sağlarlar. En içteki lensler de yine odaklayıcı yapıda çalışarak yakalanan görüntüyü görüntü düzlemine düşürür. Düzlemde oluşan görüntü klasik objektifli fotoğraf makinalarında olduğu gibi düzleme ters olarak düşer.
Şekil 2.4 Farklı açıda gelen iki ışının balıkgözü lensten geçişi (Xiong ve Turkowski 1997).
Yukarıdaki şekilde de farklı açılarda gelen ışınların görüntü düzlemine düşüşleri gösterilmek istenmiştir. Lens gurubunun tamamı tek bir sistem gibi düşünülüp merkezi optik eksenden geçecek şekilde yerleştirildiği zaman, optik eksene yakın olarak sisteme giren ışın yine optik eksene yakın olarak görüntü düzlemine düşer. Optik eksene uzak olarak sisteme giren ışın ise yine optik kanunları gereği optik eksenden daha uzak bir noktada görüntü düzlemine düşer.
2.2 Mekanik Tarayıcılar
Tümyönlü görüntüleme sistemlerinde genellikle tek bir kamera ile aynı anda geniş bir alan görüntülenir. Gözlenen alanın büyümesi görüntü çözünürlüğündeki homojenliği bozar. Lensin veya aynanın yapısına da bağlı olarak bazı bölgelerde çözünürlük yüksek iken bazı bölgelerde düşüktür. Robotik ve görsel izleme gibi bazı uygulamalar için eş zamanlı olarak çok geniş bir çevreyi görme önemlidir. Özellikle robotik alanı ile ilgili olarak otonom mobil robotların giderek daha hızlı hareket ediyor olması, çabuk yön değiştirmesi yani manevra kabiliyetinin artması bu tür uygulamalarda eşzamanlı tümyönlü görmeyi zorunlu kılar. Dinamik bir ortamda
Optik Eksen r1 r2 Görüntü Düzlemi P1 P2
hareket eden mobil robot, her yönden yaklaşan hareketli nesnelerle çarpışabilir. Dolaysıyla robot, güvenliği için her yönden yaklaşacak nesnelerden sakınabilmelidir. Bunun yanında bazı sistemlerde görüntü kaydının eş zamanlı olarak yapılmasına ihtiyaç yoktur. Bu sistemlerin kullanıldığı alanlar genellikle dinamik olmayan alanlardır. Alınan görüntü, yüksek çözünürlüklü ve ayrı olarak yakalanmış görüntülerin bileşiminden oluşabilir. Bu tür durumlarda mekanik tarayıcılar tercih edilir. Mekanik tarayıcılarla alınan görüntülerde her sahnenin, dolayısıyla oluşturulan panoramik görüntünün çözünürlüğü yüksek ve homojendir. Mekanik tarayıcıların yapısı aşağıdaki gibidir.
Şekil 2.6 Mekanik tarayıcı tarafından yakalanan fotoğraflar (Peleg ve ark. 2000).
Şekil 2.7 Mekanik tarayıcının çalışma yapısı (Micusik Pajdla 2006)
Sabit bir yüzey üzerine monte edilmiş kamera, lens eksenine dik bir eksen etrafında sabit bir açısal hızla döner. Bu dönüş, 0,1º gibi çok hassas açılarla kontrol edilir. Bu sistemin avantajı sıradan kamera kullanılabiliyor olmasıdır. Ancak kamerayı döndürecek mekanik sistemin çok sağlam kurulması gerekir. Aksi takdirde oluşturulan görüntü bozuk olacaktır. Düşey eksen etrafında dönen kamera neredeyse her pikselde bir örnek alır. Daha sonra bu örnekler yatay eksende birleştirilir.
Mekanik tarayıcıların panoramik görüntü oluşturmaları uzun sürer (on dakika civarında doğrulama yapan sistemler mevcuttur) ve görüntü elde etme işlemi sırasında sahnede hareket olmamalıdır. Bu sayede yüksek kaliteli panoramik fotoğraflar oluşturulabilir.
Bir nesneye bakıldığında mesafe tahmini yapabilmek için iki farklı açıdan bakmak gerekir. Bu, yapay optik sistemlerde olduğu gibi canlılarda da böyledir. Baktığımız bir cisme eğer iki gözümüzle bakarsak kolayca mesafe tayini yapabiliriz. Ancak tek gözle bakarsak mesafe tayininin zor olduğunu açıkça görürüz. Mekanik tarayıcılarda da eğer iki adet kamera kullanılırsa çevre yapısını belirlemek için panoramik görüntü içindeki mesafe bilgisi tahmin edilebilir. H. Ishiguro, M. Yamamoto ve S. Tsuji mekanik tarayıcı sistemlerde tek kamera kullanarak mesafe bilgisi elde etme üzerine çalışmışlardır. Üzerinde çalıştıkları sistemin yapısı aşağıdaki gibidir.
(a) (b)
Şekil 2.8 (a) Sıradan bir mekanik tarayıcının çalışması (b) R yarıçaplı daire üzerinde dönen mekanik tarayıcı
Söz konusu sistem, bir mobil robot üzerine monte edilmiş ve kapalı ortamda denenmiştir. Robot dışında çevrede hareket eden nesne yoktur. Robot açık ve düz bir zemin üzerinde hareket ettirilmiş ve hareketi üç parametre ile tanımlanmıştır, bunlar 2-D zemin üzerindeki konumu ve ufuk açısıdır.
C
R
Şekil 2.8 (a)’da panoramik görüntü oluşturan mekanik tarayıcının çalışması gösterilmiştir. Sıradan bir kamera merkez bir nokta etrafında sabit açısal hızla döner ve şekilde de görüldüğü gibi bir piksel genişliğindeki düşey yarıktan fotoğraf çeker. Yarık görüntülerinin tamamını yatay düzlemde düzenlediğimiz zaman C noktasından bakılarak elde edilmiş panoramik görüntüyü elde ederiz. Eğer kamera objektifi C noktası ile çakışırsa kamera hareketi zayıf olur ve dolaysıyla mesafe bilgisi elde etmemiz zorlaşır. Tümyönlü görüntüde mesafe bilgisi elde etmenin doğal yolu iki objektif kullanmaktır. Sarachik, bir mobil robot sistemde aynı bar üzerine yan yana monte edilmiş iki kamera kullanarak mesafe bilgisi elde etmiştir (Sarachik 1989).
Şekil 2.8 (b)’de bahsedilen sistemde ise tek kamera kullanılarak farklı bir tümyönlü görüş sistemi geliştirilmiştir. Sistemde kamera C noktasından R kadar uzakta bir noktaya yerleştirilir ve ardışıl görüntüler alır. Burada kamera hareketi, dönüşüm bileşenini oluşturur ve görüntü şemasını kullanarak mesafe bilgisini elde edebiliriz. Bu sistemde görüntü merkezine göre simetrik iki yarık oluşturulur. Kamera dönerek görüntü alırken bir yarıktan görünen nokta; daha sonra diğer yarıktan görünür. Görüntünün iki yarıktan görünmesi esnasında sistemin yaptığı 2θ’lık dönüş açısını ölçerek, cismin L’den uzaklığını tahmin edebiliriz.
Şekil 2.9 Çift yarık ve tek kameradan oluşan mekanik tarayıcı sistem Dönme Merkezi R Kamera Yolu Görüntü Düzlemi Kamera Optik Ekseni Nesne L 2φ 2φ 2Θ Düşey Yarıklar
Buna göre L uzunluğu; ) sin( sin Θ − Θ = ϕ R L (2.1)
dır. Burada φ açısı, iki yarık arasındaki açının yarısıdır (Şekil 2.9). Kullanılan bu sistem ile iki tür bilgi elde edilir. Bunlardan birincisi tümyönlü görüş yani panoramik görüntüdür. Panoramik görüntü yarıklardan alınan bütün görüntülerin yatayda yan yana birleştirilmesi ile oluşturulur. Diğer bilgi ise her özel noktanın uzaklık bilgisidir.
Aşağıdaki görüntü mekanik tarayıcı ile oluşturulmuştur. (Ishiguro ve ark. 1992)
Şekil 2.10 Mekanik bir tarayıcı ile oluşturulmuş yüksek çözünürlüklü panoramik görüntü (Strauss ve Comby 2007).
2.3 Çok Kameralı Sistemler
Stereo bir çift, bir sahnenin farklı iki noktadan alınmış görüntülerinden oluşur. Đki görüntü arasındaki her bir sahne noktasının bakış yönündeki açısal farklılığı, beyin tarafından derinlik olarak algılanır.
Şekil 2.11 Stereo görüş (Peleg ve ark. 2000). Bu yönde stereo görüş yoktur Bakış yönünde stereo görüş mümkündür
Eğer iki kameranın görüş noktaları arasında yatayda belli bir mesafe fark olursa sistem bu derinliği algılayabilir. Panoramik görüntüde alınan iki görüntüden birini diğerinin üzerine koyarak stereo elde edilir. Yani uzaklık bilgisi elde etmenin bir başka yolu da istenilen noktaya farklı en az iki yerden bakmaktır. Bu amaçla SOS (Stereo Omnidirectional System – Stereo Tümyönlü Sistem) (Shimizu ve ark. 2005) adı altında bir çalışma yapılmıştır. Sistem, yüksek çözünürlükte ve gerçek zamanlı olarak 360ºx180º görüş açısında renk ve derinlik bilgisi sağlar. Şekil 2.12’de görüldüğü gibi sistem 12 stereo üniteden oluşmaktadır ve her bir stereo sistem üç kameradan ibarettir. Merkezi kamera ve sağ kamera yatay stereo çifti oluştururken merkezi kamera ve üst kamera düşey çifti oluşturur.
(a) (b)
Şekil 2.12 (a) Merkez kameranın yan ve üst kameraya olan uzaklığı. (b) Yüksek çözünürlüklü üç kamera. (c) 12 üniteden oluşan ve küresel bir yüzey etrafına monte
Normalde küresel bir yüzey etrafına 36 kamera yerleştirildiğinde oluşturulan sistem çok büyük olacaktır. Bunu önlemek amacıyla üç kamera bir ‘T’ üzerinde birleştirilmiş ve bir 12 yüzlünün etrafına monte edilmiştir. Bu şekilde yerleştirildiğinde Şekil 2.12 (c)’de oluşturulan sistemin çapı yaklaşık 12cm olmuştur. Her bir stereo ünitenin üç kamerası aynı düzlem üzerine monte edilmiştir ve optik eksenleri birbirine paraleldir. Sağ ve üst kameralar merkezi kamera görüntüsünün x ve y eksenleri boyunca uzanır. Bir ünite üzerinde iki stereo çift olması daha doğru derinlik bilgisi elde edilmesini sağlar. Stereo ünitelerden alınan 12 adet renk ve derinlik bilgisi birleştirilerek silindirik görüntü oluşturulabilir.
(a) (b)
Şekil 2.13 (a) Küresel özyapı görüntüsü (b) Küresel derinlik görüntüsü
Oluşturulan bu yapı hareket eden nesneleri algılamak için kullanılmıştır. Algılama esnasında kullanılan yöntem şu şekildedir; ilk olarak Stereo Omnidirectional Sistem (SOS)’in önceki zaman (T = t - ∆t) ve şimdiki zaman (T = t) arasındaki kendi yer değiştirmesi, küresel derinlik görüntüsü ve küresel özyapı görüntüsü kullanılarak tahmin edilmiştir. Daha sonra yer değiştirme parametreleri ve (T = t - ∆t) anında elde edilen küresel derinlik görüntüsü kullanılarak (T = t) anı için bir derinlik görüntüsü oluşturulmuştur. Sonuç olarak önceki zamanda tahmin edilen derinlik görüntüsü ile şimdiki zamanda elde edilen derinlik görüntüsü karşılaştırılmış ve nesnelerin hareket ederken oluşturdukları tutarsız bölgeler çıkartılmıştır. Bu arada, SOS’in kendi hareketinden dolayı meydana gelmiş tıkanmış bölgeler tahmin edilir ve tutarsız bölgelerin çıkartılmasında kullanılır. Hata algılamaları ve çıkartımları da yapıldıktan sonra hareket eden cisimlerin algılama sonuçlarına varılır. Sistemin
çalışmasına ait blok diyagram ve deneyler neticesinde elde edilmiş bir örnek aşağıdaki gibidir.
Şekil 2.14 SOS sisteminin çalışmasına ait blok diyagram
Aşağıda SOS ile alınmış iki görüntüde hareket eden bölgenin bulunması gösterilmiştir. küresel derinlik görüntüsü küresel özyapı görüntüsü küresel derinlik görüntüsü küresel özyapı görüntüsü T = t - ∆t T = t
Sisteme ait hareketin tahmini
Tahmini derinlik görüntüsünün oluşturulması Tutarsız bölgelerin çıkartılması Görüntü çıkarımı Hata algılama önleme Algılama sonucu SOS
(a) (b)
(c) (d)
Şekil 2.15 (a) T = t - ∆t anında alınan görüntü ve (b) T = t anında alınan görüntü. (c) Oluşturulan tahmini derinlik görüntüsü. (d) Algılanmış hareketli alan
Görüntü çıkarımı ve hata çıkarımı yapıldıktan sonra hareket etmiş bölgeler belirlenir (Peleg ve ark.2000, Shimizu ve ark. 2005, Shimizu ve ark. 2006 ).
2.4 Katadioptrik Sistemler
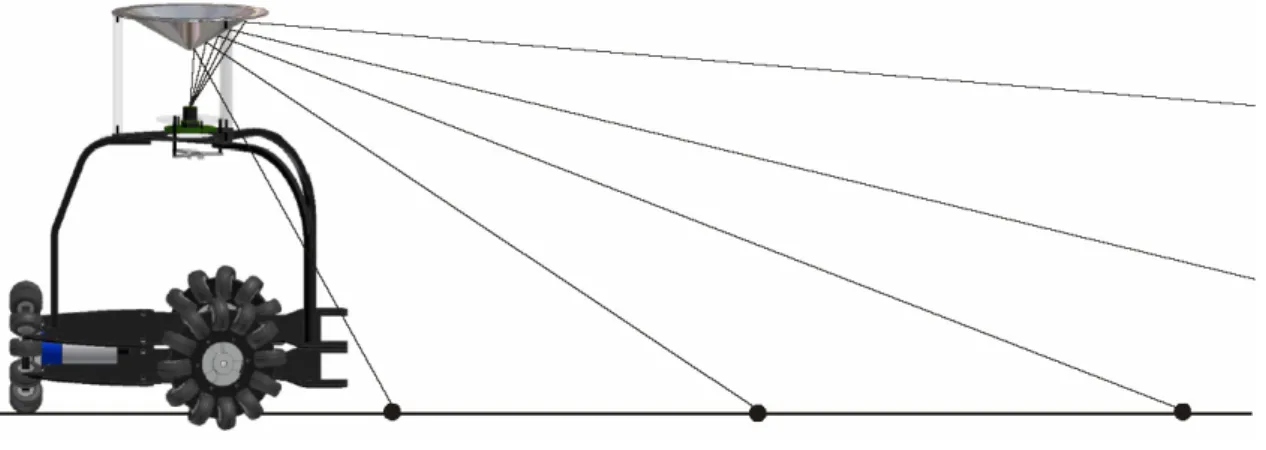
Yapısının daha basit olması ve 360° görüş sağlaması nedeniyle bugün en çok tercih edilen sistemlerden biri katadioptrik sistemlerdir. Genellikle dış bükey bir ayna ve kameradan oluşan katadioptrik görüntü sensörü, eş zamanlı olarak 360° lik bir alanı gösterebilir. Yakalanan geniş görüş alanı nedeniyle açısal çözünürlük düşüktür. Çözünürlüğün arttırılması ve daha kaliteli görüntü elde edilmesi üzerine bugün gelinen noktada çalışmalar devam etmektedir (Nagahara ve ark. 2003).
Katadioptrik sıfatı katoptrik ve dioptrik kelimelerinin birleşiminden oluşur. Aynalar gibi ışını yansıtan elemanlara katoptrik elemanlar; mercekler gibi ışığı kıran elemanlara ise dioptrik elemanlar denir. Dolaysıyla katadioptrik sistemler ışığı hem
yansıtan hem de kıran elemanların birlikte kullanıldığı sistemlerdir. Aşağıdaki şekilde bir katadioptrik sistemin kesiti gösterilmiştir.
Aynalar kamera önüne yerleştirilirken optik eksenlerinin sensör düzlemine dik olmasına çok dikkat edilmelidir. Daha sonra elde edilen görüntüye görüntü işleme teknikleri uygulanırken bu simetriklik ve düzgün konumlama büyük önem kazanır.
Dışbükey ayna kullanan tümyönlü görüş sensörlerinin iki avantajı vardır; sensörler gerçek zamanlı olarak bir seferde çok geniş bir alanı montajsız yakalayabilir ve küçültülmeleri oldukça kolaydır (Yoshida ve ark. 2006).
Şekil 2.16 Konveks bir ayna ve sıradan kameradan oluşan bir katadioptrik sistemin yapısı
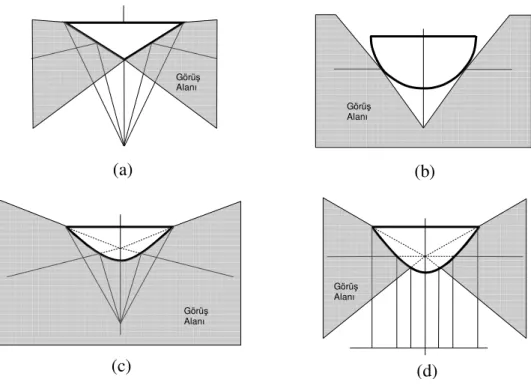
Kullanılan dışbükey aynanın kesiti de oldukça önemlidir. Çünkü bu kesit doğrudan sistemin görüş alanını belirler. Bazı aynalarda optik kanunları gereği kör alanlar oluşur. Bu alanlar kameranın konumuna göre artıp azalsa da bazı ayna tiplerinde bu alanları yok etmek imkansızdır. Konik, küresel ve parabolik kesite sahip aynaların kullanıldığı sistemlerde bu kör alanlar kaçınılmazdır. Hiperbolik kesite sahip ayna ile oluşturulan sistemde kör alan olmaz, kamera istikametinde çok geniş bir alan kesintisiz olarak görülür. Aşağıdaki şekilde farklı kesitlerdeki aynalarla oluşturulmuş katadioptrik sistemler ve görüş alanları görülmektedir.
Şekil 2.17 Farklı kesitlerdeki aynalarla oluşturulmuş sistemler ve görüş alanları. (a) Konik aynalı sistem (b) Küresel aynalı sistem (c)Hiperbolik aynalı sistem
(d)Parabolik aynalı sistem (Drocourt ve ark. 2006). Görüş Alanı Görüş Alanı (a) (b) Görüş Alanı (d) Görüş Alanı (c)
Çizelge 2.1 Ayna türlerinin karşılaştırılması (Potucek 2006)
Ayna Maliyet Astigmatizm Odak
Derinliği Düşey Görüş Açısı Tek Merkezli Projeksiyon Lens
Küresel Düşük Düşük Kısa 90..10 - Yok Normal
Konik Düşük Yüksek Uzun 45..45 - Yok Normal
Küçük Eğrili Hiperbolik
Yüksek Düşük Kısa 90..10 - Var Normal
Büyük Eğrili Hiperbolik
Yüksek Yüksek Uzun 90..45 - Var Normal
Küçük Eğrili Parabolik
Yüksek Düşük Kısa 90..10 - Var Telesentrik
Büyük Eğrili Parabolik
Yüksek Düşük Kısa
-90..45 Var Telesentrik
Bugüne kadar geliştirilmiş farklı tiplerde katadioptrik sistemler mevcuttur. Bu sistemleri aşağıdaki gibi sınıflandırabiliriz;
Çizelge 2.2 Katadioptrik sistemlerin sınıflandırılması
Efektif Görüş Noktası
Katadioptrik Sistemler
Ayna Sayısı
Tek Aynalı Sistemler Çok Aynalı Sistemler
Tek Görüş Noktalı Olmayan (non-SVP) Hiperboloidal Paraboloidal Elipsoidal Küresel Konik
Tek Görüş Noktalı Olan (SVP)
Katadioptrik sistemleri ayna sayısına göre kısaca inceledikten sonra görüş noktası sayısına göre inceleyeceğiz.
Genellikle tek ve konveks (dışbükey) aynalar kullanılan sistemler olduğu gibi birkaç aynadan oluşan veya konkav (içbükey) ayna kullanılan sistemler de mevcuttur. Ancak bugün en çok tercih edilen sistemler sıradan bir kamera ve dışbükey bir aynadan oluşmaktadır. Şekil 2.18’de farklı sayıda ve tipteki aynalarla oluşturulmuş katadioptrik sistemler görülmektedir. Çok sayıda ayna kullanılması sistemin oluşturulmasını oldukça zorlaştırmaktadır. Çünkü tek ayna dahi kullanırken aynanın simetrik ve merkezi bir noktaya yerleştirilmesi oldukça zordur. Bu sayı iki ya da üçe çıktığı zaman sistemin statiği oldukça karmaşık bir hale gelmektedir ki bu da imalatı zorlaştırır. Birden fazla ayna kullanılmasının nedeni ise üstel olarak değişen çözünürlük eğrisini doğrusal yapmak ya da doğrusala yakınlaştırmaktır. Đlerde bu konudan daha ayrıntılı şekilde bahsedilecektir.
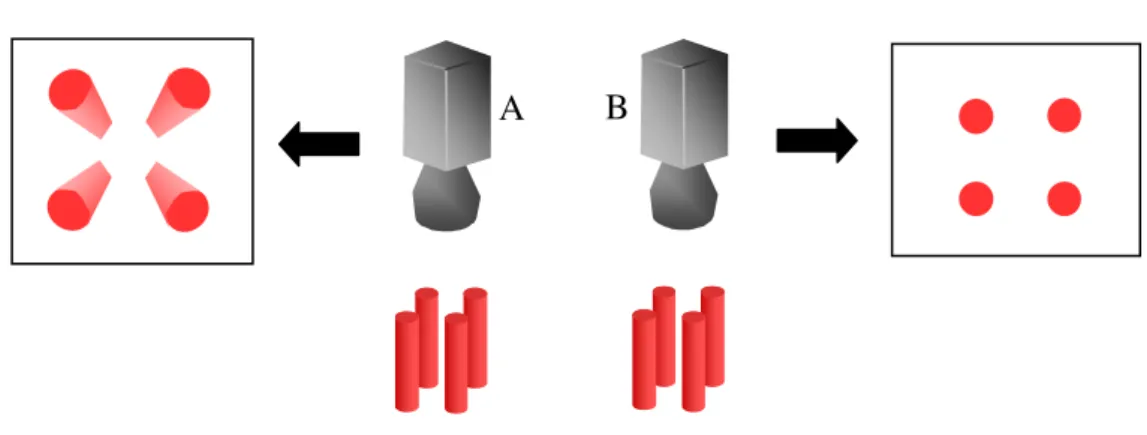
Birden fazla ayna kullanılmasının bir başka nedeni de mobil robotlarda seyir görevleri esnasında daha yüksek çözünürlüğe ihtiyaç duyulmasıdır. Bir nesne ile işlem yapılması veya görüntü analizi, sınırlı görüş alanına sahip kamera ile gerçekleştirilebilir ancak yüksek çözünürlük gereklidir. Bununla birlikte tümyönlü kameranın çözünürlüğü bu tür görevler için yeterli değildir çünkü tümyönlü görüntü düşük çözünürlükteki görüntü düzlemi üzerine düşürülür. Sıradan bir tümyönlü kamera sabit fakat düşük açısal çözünürlüğe sahiptir. Genellikle nesne tanıma ve hatasız işlem yapabilme için yüksek çözünürlüklü görüntü gereklidir. Örneğin Şekil 2.18 (a)’da oluşturulan sistemin çözünürlüğü ön ve arka görüş esnasında sıradan tümyönlü kamera sistemlerine göre yaklaşık iki kere daha yüksektir.
Şekil 2.18 Değişik yapıdaki katadioptrik sistemler (Kondo ve ark. 2005, Yoshida ve ark. 2006, Fiala ve Basu 2002).
b)1 konveks- 2 konveks
c)1konkav- 2 konveks a) 1 konveks- 1konkav
d)1 konveks- 2 konkav
e)1 konkav- 2 konkav f) Çift yuvarlaklı ayna
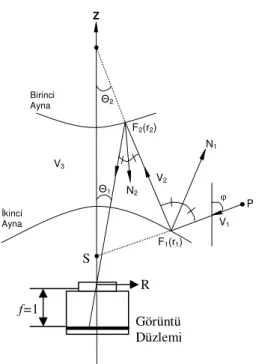
Tümyönlü görüş sistemleri, efektif görüş noktası sayısına bakılarak SVP (Single View Point – Tek Görüş Noktalı) ve non-SVP (non-Single View Point - Tek Görüş Noktalı Olmayan) sistemler olarak ikiye ayrılabilir. Bazı çalışmalarda merkezi veya merkezi olmayan görüş sistemleri olarak da bahsedilirler. Tek görüş noktalı sistemlerin modelleme işlemi daha basittir. Hiperbolik, parabolik ve elipsoidal aynalar kullanılarak SVP görüntüleme sistemi oluşturulabilir. Elipsoidal aynanın çalışma yüzeyi, görüş alanını sınırlayan iç yüzeyidir. Parabolik aynalar ise telesentrik lenslerle kullanılırlar. Ancak telesentrik lensler çok pahalıdır ve bu yüzden oldukça az kullanılırlar. Hiperbolik aynalar en uygun seçimdir. Yüksek görüş alanı, düşük maliyet ve iyi görüntüleme etkisine sahip olmaları hiperbolik aynaların daha fazla tercih edilmesine sebep olmuştur (Wang ve ark. 2006).
Parabolik ve hiperbolik aynalar tek görüş noktalıdır. Bundan dolayı giriş görüntüsü distorsiyonsuz olarak bir perspektif görüntüye veya bir panoramik görüntüye dönüştürülebilir. Bununla birlikte, görüntünün çözünürlük dağılımı, aynanın şeklinden dolayı düşme açısı veya görüntü pozisyonuyla ilgili olarak doğrusal değildir (Yoshida ve ark 2006).