T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
DC MOTORLA TAHRĠK EDĠLEN ĠKĠ UZUVLU MANĠPÜLATÖRÜN ADIM ATMA
HAREKETĠNĠN KONTROLÜ Betül AYKAÇ
YÜKSEK LĠSANS TEZĠ Makine Anabilim Dalı
Kasım-2011 KONYA Her Hakkı Saklıdır
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
Betül AYKAÇ
iv
ÖZET
YÜKSEK LĠSANS TEZĠ
DC MOTORLA TAHRĠK EDĠLEN ĠKĠ UZUVLU MANĠPÜLATÖRÜN ADIM ATMA HAREKETĠNĠN KONTROLÜ
Betül AYKAÇ
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Makine Anabilim Dalı
DanıĢman: Prof. Dr. Ziya ġAKA 2011, 65 Sayfa
Jüri
Prof. Dr. Ziya ġAKA Doç. Dr. Mete KALYONCU
Yrd. Doç. Dr. Ziya ÖZÇELĠK
Bu çalıĢmada, iki serbestlik dereceli ve iki uzuvlu manipülatöre DC motorlarla insan adım atma hareketine benzer bir hareket yaptırılmaya çalıĢılmıĢtır. Adım atma hareketinde kalça ve diz eklem açıları verileri literatürden sağlanmıĢtır. Mekanizmanın dinamik analizi yapılarak hareket denklemleri Lagrange-Euler yöntemiyle bulunmuĢtur. Bu denklemler yardımıyla motorların uygulaması gereken torklar belirlenmiĢtir. Mekanizmada her bir ekleme bağlanmıĢ toplam iki tane DC motor mevcuttur ve bunların her biri sadece bir kolun hareketini sağlamıĢtır. DC motorların tanıtımı ve dinamik modeli çalıĢmada verilmiĢtir. Ġstenilen adım atma hareketinin kontrolü PID ve Bulanık Mantık yöntemleriyle yapılmıĢtır. Her iki yöntemin baĢarısı ve sonuçları karĢılaĢtırılmıĢtır. Sistemin SimMechanics modeli MATLAB/Simulink programında yapılmıĢtır. Sonuçta her iki kontrol yöntemiyle de sisteme adım atma hareketi yaptırılmıĢ, sonuç ve hata grafikleri çalıĢmanın sonunda verilmiĢtir.
Anahtar Kelimeler: Adım Atma Hareketi, Bulanık Mantık, Kontrol, Manipülatör, PID, DC Motor.
v
ABSTRACT
MS THESIS
CONTROL OF STEPPING MOTION OF TWO ARTICULATED MANIPULATOR WHICH DRIVEN BY DC MOTORS
Betül AYKAÇ
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE IN MECHANICAL ENGINEERING
Advisor: Prof. Dr. Ziya ġAKA
2011, 65 Pages
Jury
Prof. Dr. Ziya ġAKA
Assoc. Prof. Dr. Mete KALYONCU Asst. Prof. Dr. Ziya ÖZÇELĠK
In this study, the manipulator which has two degree of freedom and two limbs tried to take a step motion with two DC motors which similar to the movement of people. A hip and knee joint angle of the movement of stepping into the literature data is provided. A Lagrange-Euler equation of motion method of dynamic analysis of the mechanism was made. Application of torque to be determined with the help of these engines equations. Adding to the controller, connected to a DC motor and a total of two units each of which has not only the movement of an arm. DC motors are the promotion and study the dynamic model. PID control and fuzzy logic methods of stepping into the desired movement is made. The success of both methods and the results compared. SimMechanics model of the system is made by MATLAB / Simulink. Ultimately, both the control method of stepping into the movement built into the system, are given at the end of the study results, and error charts.
vi
ÖNSÖZ
Yüksek lisans tez çalıĢmam boyunca bana yardımlarıyla destek olan tez danıĢman hocam Sayın Prof. Dr. Ziya ġaka‟ya, Makine Mühendisliği Bölümü AraĢtırma Görevlilerinden Sayın Dr. Mustafa Tınkır ve Yusuf ġahin‟e çok teĢekkür ederim. Ayrıca sevgili annem baĢta olmak üzere maddi ve manevi desteklerini benden esirgemeyen bütün yakınlarıma teĢekkürü bir borç bilirim.
Betül AYKAÇ KONYA-2011
vii ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii SĠMGELER VE KISALTMALAR ... ix 1. GĠRĠġ ... 1 2. KAYNAK ARAġTIRMASI ... 5 3. MATERYAL VE METOD ... 11
4. MEKANĠZMANIN KĠNEMATĠĞĠ VE DĠNAMĠK ANALĠZĠ ... 12
4.1. Mekanizmanın Kinematiği ... 12
4.2. Mekanizmanın Lagrange-Euler Yöntemiyle Dinamik Analizi ... 16
5. ĠNSAN ADIM ATMA HAREKETĠNDE EKLEM AÇILARI VERĠLERĠ ... 22
6. DC MOTORLAR ... 27
6.1. Göbek Sargısı Denetimli DC Motorun Matematiksel Modeli ve Transfer Fonksiyonu ... 28
7. KONTROL YÖNTEMLERĠ ... 32
8. PID KONTROL ... 33
8.1. PID Parametrelerinin Ayarlanması ... 35
8.1.1. Ziegler-Nichols basamak cevabı yöntemi ... 35
8.1.2. Ziegler-Nichols frekans cevabı yöntemi ... 36
9. BULANIK MANTIK KONTROL ... 37
9.1. Bulanık Mantık Kontrolün Tarihçesi ... 37
9.2. Bulanık Mantık Kontrolün Tanımı ... 38
9.3. Bulanık Mantık Kontrolün Genel Yapısı ... 40
9.4. Bulanık Mantık Kontrolün Avantajları ve Dezavantajları ... 41
9.5. Bulanık Mantık Kural Tabanı ... 41
9.6. MATLAB-Bulanık Mantık Kontrol (Fuzzy Logic Toolbox) ... 43
9.7. Bulanık Mantık Kontrolcü Tasarımı ... 45
9.8. Bulanık Mantık Kontrolün ... 47
9.9. Bulanık Kontrolcünün Durulayıcı ÇıkıĢları ... 49
viii
10.1. Herhangi Bir Kontrol Yöntemi Uygulanmadığı Zaman Sistemin Simülasyon
Sonuçları ... 50
10.2. Sistemin PID Kontrollü Simülasyon Sonuçları ... 54
10.3. Sistemin Bulanık Mantık Kontrollü Simülasyon Sonuçları ... 57
11. SONUÇ ... 61
KAYNAKLAR ... 62
ix
SĠMGELER VE KISALTMALAR Simgeler
a :Maksimum Eğim
ai :Ortak Normaller Boyunca Ölçülen En Kısa Mesafe
αi :ai‟ye Dik Bir Düzlemde Ölçülen Açı
B :Dönel Sönümleme Elemanı di :Normaller Arasındaki Mesafe
e :Hata
et :Hatanın DeğiĢimi eg :GiriĢ Gerilimi (Volt)
eb :Zıt Elektromotor Gerilimi (Volt)
f :Perspektif Transformasyon
G1 :Birinci Çubuğun Homojen Kütle Merkezi
G2 :Ġkinci Çubuğun Homojen Kütle Merkezi
g :Yerçekimi Ġvmesi (m/s2) ig :Armatür Akımı (Amper)
I1 :Birinci Çubuğun Kütle Atalet Momenti
I2 :Ġkinci Çubuğun Kütle Atalet Momenti
J :Motor Eylemsizlik Kütlesi (Kgm2) :Zıt Elektromotor Sabiti
Km :Motor veya DönüĢtürme Sabiti (Nm/A)
Kc :Kritik Kazanç
K :Kinetik Enerji Kd :PID Türev Kazancı
Ki :PID Ġntegral Kazancı
Kp :PID Oransal Kazancı
Ku :Sistemin osilasyona gittiği andaki P değeri
L :Lagrange Formülasyonu Lg :Göbek Sargısı Ġndüktansı (mH)
l1 :Birinci Eklem Uzunluğu (m)
l2 :Ġkinci Eklem Uzunluğu (m)
m1 :Birinci Çubuğun Kütlesi (kg)
m2 :Ġkinci Çubuğun Kütlesi (kg)
P :Potansiyel Enerji
p :Konum Vektörü
Rg :Armatür Direnci (Ohm)
r :Kütle Merkezi
R :Oryantasyon Matrisi Tm :Zaman Sabiti
T :Transformasyon Matrisi
t :Zaman
Td :Türev Kontrol Zaman Sabiti
Ti :Ġntegral Kontrol Zaman Sabiti
y1 :Birinci y Eksen Takım Koordinatı
y2 :Ġkinci y Eksen Takım Koordinatı
:Birinci y Koordinatının Birinci Dereceden Türevi :Ġkinci y Koordinatının Birinci Dereceden Türevi
x θ1 :Birinci Eklem Açısı (°)
θ2 :Ġkinci Eklem Açısı (°)
θi :Normaller Arasındaki Dik Düzlemde Ölçülen Açı (°)
θç :Rotor Açısal Konumu (°)
:Birinci Eklem Açısal Hızı (rad/sn) :Ġkinci Eklem Açısal Hızı (rad/sn) :Birinci Motor Torku (Nm) :Ġkinci Motor Torku (Nm) wc :Frekans
x1 :Birinci x Eksen Takım Koordinatı
x2 :Ġkinci x Eksen Takım Koordinatı
:Birinci x Koordinatının Birinci Dereceden Türevi :Ġkinci x Koordinatının Birinci Dereceden Türevi
V :Voltaj (V)
v1 :Birinci Kütle Merkezinin Hızı (m/sn)
v2 :Ġkinci Kütle Merkezinin Hızı (m/sn)
Kısaltmalar
BMD :Bulanık Mantık Denetimi BRA :Ġngiliz Robot Birliği COA :Center Of Area
CNC :Computer Numerical Control DTSM :Doğrusal Ters Sarkaç Modeli
DA :Doğru Akım
DC :Direct Current
DCBM :Direct Current Bulanık Mantık D-H :Denavit-Hartenberg
GAM :Gövde Ağırlık Merkezi
JIRA :Japon Endüstriyel Robot Birliği L-E :Lagrange–Euler
N-E :Newton–Euler
N :Negatif
NCB :Negatif Çok Büyük
NB :Negatif Büyük
NK :Negatif Küçük
NCK :Negatif Çok Küçük PID :Orantı-Ġntegral-Türev
P :Pozitif
PCB :Pozitif Çok Büyük
PB :Pozitif Büyük
PK :Pozitif Küçük
PCK :Pozitif Çok Küçük
RIA :Amerikan Robot Endüstrisi
S :Sıfır
YSA :Yapay Sinir Ağı Z-N :Ziegler-Nichols
1. GĠRĠġ
GeliĢen teknoloji, imalat kalitesi ve verimliliğin artması ile robotların günlük hayatta ki kullanımı gün geçtikçe çoğalmaktadır. Robotların en yaygın kullanım alanlarından biri endüstriyel uygulamalardır. Ġngiliz Robot Birliği (BRA) ve Japon Endüstriyel Robot Birliği (JIRA) gibi ulusal robotik birliklerinin yayınladığı resmi robot tanımları, çoğunlukla endüstriyel robotların tanımıdır. Amerikan Robot Enstitüsü (RIA) tarafından robotun tanımı Ģu Ģekilde yapılmıĢtır: Robot, çeĢitli görevleri yapmak maksadıyla değiĢik Ģekillerde programlanmıĢ hareketlerle; nesnelerin, gereçlerin ya da özel düzeneklerin taĢınması için tasarlanmıĢ çok iĢlevli bir manipülatördür. Bir robot dört ana kısımdan meydana gelir:
1. Bir mekanik yapı ya da eklemlerle birbirine bağlanmıĢ sıralı rijit cisimlerden
(uzuvlardan) oluĢan manipülatör; manipülatör, serbestliği sağlayan bir koldan, el becerisi sağlayan bir bilekten ve robotun yapması gereken görevi tamamlayan sonlandırıcıdan oluĢmaktadır.
2. Eklemlerin hareketlenmesiyle manipülatörün hareketini sağlayan elektronik aksam
yani hareketlendiriciler.
3. Manipülatörün veya çevrenin durumunu gözleyen algılayıcılar. 4. Manipülatör hareketini kontrol eden ve yöneten bir kontrol sistemi.
Robotlar konusunda önemli çalıĢmalar mevcuttur. Tehlikeli ve insan gücünü aĢan iĢlerde, fabrika otomasyonunda, çeĢitli araĢtırma ve geliĢtirme projelerinde robot kullanımı tercih edilmektedir. Robotlar, bir araya getirilen mekanik ve elektronik alt sistemlerin uygun olarak kontrol edilmesi ile çalıĢır. Robot teknolojisi sürekli geliĢtiğinden, robot kontrolü önemli problemlerden biri olmuĢtur. Robotun modellemesi ve uygun kontrolü yapılmadığında bu geliĢmeler bir anlam taĢımaz. Bir robot sistemin tasarımında, istenilen hareketlerin kusursuz biçimde elde edilebilmesi için, kontrol ünitelerinin ve programlama Ģekillerinin doğru olması gerekir. Bu nedenle, robot sistemlerin içinde kullanılan sürücüler ve alt sistemlerin hassas biçimde kontrolü sağlanmalıdır.
Manipülatörler çalıĢma uzaylarına göre Ģu Ģekilde sınıflandırılırlar:
- Kartezyen Manipülatör: Bu tip bir manipülatör üç tane kayar tip eklem ile elde edilir.
Mekanik yönden çok sağlamdır fakat çalıĢma uzayındaki hareket yeteneği bakımından zayıftır. Bu tip manipülatörler çok büyük boyutlarda ve ağırlıklarda nesneleri hareket
ettirmek ve taĢımak için idealdir. Kartezyen manipülatörlerde eklemleri hareket ettiren motorlar çoğunlukla elektrik motorlardır.
- Silindirik Manipülatör: Bu tip bir manipülatör bir tane döner ve iki tane kayar tip
eklem ile elde edilir. Bu tip manipülatörler de mekanik yönden sağlamdır fakat bilek konum doğruluğu yatay harekete bağlı olarak azalır. Benzer Ģekilde büyük boyutlu nesnelerin taĢınmasında kullanılırlar. Bu tip manipülatörlerde hidrolik motorları tercih edilir.
- Küresel Manipülatör: Bu tip bir manipülatör iki tane döner ve bir tane kayar tip eklem ile elde edilir. Bu tip manipülatörler mekanik yönden diğer iki tipten daha zayıf, mekanik yapı yönünden daha karmaĢıktır. Çoğunlukla makine montajlarında kullanılırlar. Bu tip manipülatörlerde elektrik motorları tercih edilir.
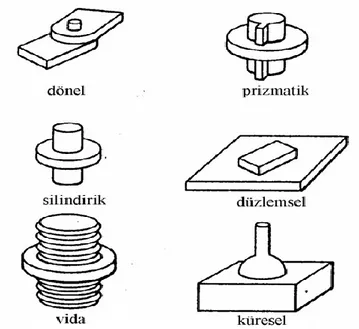
- Eklemli veya Ġnsan Kolu Manipülatör: Ġnsan kol yapısı esas alındığı için bu isim verilmiĢtir. Bu tip manipülatörler tüm eklemleri döner olduğundan çalıĢma uzaylarında en yetenekli manipülatörlerdir. Endüstriyel uygulamalarda (boyama, kaynak yapma, montaj, yüzey temizleme vb.) geniĢ kullanım alanına sahiptirler. Bu tip manipülatörlerde elektrik motorları tercih edilir. Manipülatör eklemlerle birbirine bağlanmıĢ uzuvlardan oluĢur. Robotikte uzuvlar daha çok eklemler arasındaki iliĢkiyi belirleyen yapılar olarak düĢünülür. ġekil 1.1‟de görüldüğü gibi eklemlerin dönel, prizmatik, silindirik, düzlemsel, vida ve küresel gibi çeĢitleri vardır.
Bu çalıĢmada iki eklemli manipülatörün kontrolü; kinematik analiz, dinamik analiz, ve kontrol konularını içeren bir çalıĢmadır. Düz ve ters kinematik analizde Denavit-Hartenberg yaklaĢımı ve matris cebri metodu kullanılmıĢtır. Ġnsan yürüyüĢü göz önünde bulundurularak yaklaĢık bir yürüyüĢ yörüngesi literatürden sağlanmıĢtır. Ġstenen yörüngeyi sağlayacak eklem değiĢkenlerinin değerlerini hesaplamak üzere açısal değiĢimlerin matematiksel ifadeleri sayısal yakınlaĢım yoluyla elde edilmiĢtir. Eklem yörüngesi polinomik yapıda veya harmonik yapıda olabilir. Elde edilen eklem yörüngelerini izleyecek Ģekilde DC motorların sürülmesi için bir kontrol algoritması uygulanmıĢtır. DC motorun dinamiği de matematiksel modele ilave edilerek kontrol uygulanmıĢtır. Ġki serbestlik derecesine sahip mekanizma; iki rijit uzvun ucu açık bir mekanizma oluĢturacak Ģekilde dönel mafsallarla birleĢtirilerek, DC motorlar tarafından sürülmesi Ģeklinde modellenebilir. Sistem ġekil 1.2‟de görüldüğü gibi iki tane homojen çubuk ve iki tane de DC motordan oluĢmaktadır. Birinci çubuk sabit bir yere döner mafsalla bağlanmıĢ, ikinci çubuk ise birinci çubuğa döner mafsalla bağlanmıĢtır.
ġekil 1.2. Mekanizmanın yapısı
Çubuklar homojen olarak düĢünüldükleri için kütle merkezleri orta noktalarındadır. Her iki çubuğun bağlandığı eklemlerdeki DC motorlar çubukların hareketini sağlayan güç kaynaklarıdır. Ġki serbestlik dereceli ve iki uzuvlu manipülatöre insan adım atma hareketine benzer yürüme hareketi, PID ve Bulanık Mantık yöntemi kullanılarak kontrol edilmesi amaçlanmıĢtır. Bu kontrolcülerden PID kontrolcü tasarımı bulanık mantık kontrolcülerin tasarımlarına göre daha kolay ve basittir. Günümüzde klasik kontrol yöntemi olarak bildiğimiz PID kontrol, oldukça yaygın bir kullanım
G
G DC Motor
alanına sahiptir. Fakat doğrusal olan bu kontrol tekniği, doğrusal olmayan sistemlerde kötü performans sergilediğinden dolayı, yeni arayıĢlar içerisine girilmiĢtir. Yapay Zekâ tekniklerinin ortaya çıkması ile insan düĢüncesine benzer mantık ve sezgi yoluyla sistemlerin kontrol edildiği yeni metotlar bu arayıĢların sonucudur. GeliĢen yapay zeka tekniklerinden biri olan Bulanık Mantık birçok alanda kullanıldığı gibi lineer olmayan sistemlerin de etkili bir Ģekilde kontrolünü sağlamaktadır.
2. KAYNAK ARAġTIRMASI
Fu ve ark. (1987), çalıĢmalarında puma tipi bir robot üzerinde araĢtırmalar yapmıĢlardır. Denavit-Hartenberg yaklaĢımını temel alarak kinematik ve dinamik analizi gerçekleĢtirmiĢlerdir. Kinematik analizi; ters kinematik ve düz kinematik analiz olarak iki aĢamada ele almıĢlardır. Kinematik analiz aĢamasında elde edilen denklemleri dinamik analizde de kullanarak sistemin matematiksel ifadesini matris formunda elde etmiĢlerdir. Ayrıca çalıĢmalarında çeĢitli kontrol metotlarından bahsetmiĢlerdir.
Ogata (1997), kitabında mekanik sistemlerin matematiksel modellerinin ve sistem cevabının elde edilmesiyle ilgili klasik teknikler vermiĢtir. Kontrol sistemlerinin dizaynını, Laplace ve Ters Laplace dönüĢüm teorilerini, dinamik sistemlerin durum uzay modelinin bulunmasını ve temel kontrol tekniklerini açıklamıĢtır. PID kontrol tekniği ile ilgili bölümde ise PID‟nin teorik açıklamasını yapmıĢ ve değiĢik sistemlerde nasıl kullanılacağından bahsetmiĢtir.
Hacıoğlu (2004), tez çalıĢmasında bulanık mantık ile kayan kipli kontrolün avantajlarını bir araya getiren bir kontrol mekanizmasının tasarımını ve bir robotun kontrolünde kullanılmasını amaçlamıĢtır. Kayan kipli kontrolcünün kontrol kazancının ve kayma yüzeyi eğiminin bulanık mantık ile belirlendiği, Bulanık Mantıklı Kayan Kipli Kontrolcüyü tanıtmıĢ ve bu kontrolcüyü de robot modeline uygulamıĢtır. Uyguladığı kontrolcülerin performanslarını değerlendirmiĢ, geliĢtirdiği kontrol yönteminin verdiği sonuçları tartıĢmıĢtır. PID kontrol gibi geleneksel kontrol yöntemlerinin, dıĢ bozucu etkilerin, parametre değiĢimlerinin ve belirsizliklerinin olduğu durumlarda iyi netice vermeyebildiğini söylemiĢtir.
ġahin (2006), tez çalıĢmasında kontrolü düĢünülen robot için kinematik denklemleri elde etmiĢtir. Kartezyen uzayda verilen yörüngenin takibinde yörünge
planlaması yaparak robot uç noktasının hareketlerini yumuĢatmıĢtır. Bu sayede mafsal motorlarına gelen ani yükleri minimuma indirmiĢ ve gerçekleĢen yörüngedeki hatalarda azalma sağlamıĢtır. Dinamik analiz ile robot dinamiğini incelemiĢ, mafsal motorlarına ait tork denklemlerini bulmuĢtur. Robotun dinamik analizinde programlama mantığına uygunluğu açısından Lagrange-Euler yaklaĢımını kullanmıĢtır.
Yücel (2006), tez çalıĢmasında hareketli, iki serbestlik dereceli bir manipülatör sisteminin dinamik modelini elde etmiĢ ve manipülatörün konum kontrolünü yapmıĢtır. Manipülatör sistemi nonlineer bir sistem olduğu için lineerleĢtirme iĢlemi yapmıĢtır. Sistemde denetim tasarım aracı olarak PID kontrolcüyü kullanmıĢtır.
Durmaz (2007), tez çalıĢmasında yapay sinir ağlarını, bulanık mantık ve model referans adaptif kontrolünü, sinirsel bulanık mantık kontrolörü yapısı altında birleĢtirmiĢtir. Önerdiği kontrolör, bulanık kural yapısını ve üyelik fonksiyonlarının parametrelerini ayarlayabilmek için öğrenme yeteneğine sahiptir. ÇalıĢmasının sonunda bir, iki ve üç serbestlik dereceli robot kollarına verilen yörüngeleri izlettirmiĢ ve performans değerlerini gözlemlemiĢtir.
Koca (2007), tez çalıĢmasında robot manipülatörün eksen sayısının artmasıyla birlikte, robotun hareket yeteneğinin de arttığını bununla beraber robot manipülatörün denetiminin de zorlaĢmakta olduğunu ve denetim algoritmasının daha karmaĢık hale geldiğini belirtmiĢtir. ÇalıĢmada ayrıca endüstride kullanılan eksen-özgül ve kartezyen-özgül robot manipülatör denetim yöntemlerini uygulamıĢtır. Yapılan eksen-kartezyen-özgül çalıĢmada altı eksenli robot manipülatörün bir manevra kolu ile basit ve ekonomik olarak denetimini amaçlamıĢtır.
Huang ve ark. (2007), makale çalıĢmalarında üzerinde çalıĢtıkları robotu, düĢük hızda ve yüksek torkun avantajıyla ultrasonik motorlarla çalıĢtırmıĢlardır. Ultrasonik motorların hızı, çalıĢmasının ne sıklıkta (frekans) olduğunun ölçülmesiyle kontrol etmiĢlerdir. Robotun kinematik ve kinetik analizlerini, „adams‟ kullanarak gerçekleĢtirmiĢlerdir. Ultrasonik motorların modelinin kontrolünün doğrulanması için ve zamana bağlı değiĢken motor parametrelerinin doğrulanma eksikliğinden dolayı Bulanık Mantık otomatik ayarlamalı PID kontrolcüsünü denemiĢlerdir. Bulanık M.-PID kontolcüsünü geliĢtirerek robotun yeni pozisyonlarındaki hızının ölçülmesi için geri beslemeli stratejileri önermiĢlerdir ve uygulamıĢlardır. Önerilen kontrol stratejisinin geçerliliğini ve Bulanık Mantık kontrolcüsünü araĢtırmalarla doğrulamıĢlardır.
Seven ve ark. (2008), iki bacaklı yürüyen robotlarda referans yörüngesinin oluĢturulmasının çok önemli bir problem olduğunu ve referans yörüngesi oluĢturulmasını kolaylaĢtıran Doğrusal Ters Sarkaç Modelinin (DTSM) literatürde yaygın bir Ģekilde kullanılmakta olduğunu çalıĢmalarında belirtmiĢlerdir. Bildirilerinde ayrıca robotun gövdesinin ve salınan bacağın dinamiklerini içeren, iki noktasal ağırlıklı bir DTSM kullanmıĢ ve bu modeli beĢinci dereceden durum-uzayı denklemleri ile tanımlamıĢlardır. Gövde ağırlık merkezinin (GAM) referans yörüngesini, önceden belirlenmiĢ ayak merkezini ve Sıfır Moment Noktası referanslarını kullanarak elde etmiĢlerdir. Yürüme hareketinin sağlanması amacıyla ters kinematik tabanlı bir konum kontrolünü uygulamıĢlardır. Tek noktasal ağırlıklı ve iki noktasal ağırlıklı Doğrusal Ters Sarkaç Modellerinin yürüyüĢ performanslarını 12 serbestlik dereceli ve iki bacaklı
bir yürüyen robotun üç boyutlu tam dinamik benzetimi yardımıyla karĢılaĢtırmıĢlardır. Robotun yürüyüĢ kararlılığı açısından iki noktasal yüklü modelin daha olumlu sonuçlar verdiğini göstermiĢtir.
Erbatur ve ark. (2008), SURALP, Sabancı Üniversitesi laboratuarlarında tasarlanmıĢ ve imal edilmekte olan yeni bir insansı robot platformudur. Ġmalatı tamamlandığında; bacaklarında, kollarında, boynunda ve gövdesinde toplamda 30 serbestlik derecesine sahip olması planlanmıĢtır. ġu ana kadar bu robotun bacak modülü olan, 12 serbestlik derecesine sahip SURALP-L‟nin üretimi tamamlanmıĢtır. Bu bildiride, bacak modülünün ve tüm robotun tasarım esaslarını anlatmıĢlardır. Mekanik tasarımı, tahrik mekanizmalarını, algılayıcıları, kontrol donanımını ve algoritmalarını ele almıĢlardır. Tahrik sistemleri, DC motorlara bağlanmıĢ kayıĢ kasnak mekanizmalarını içermiĢtir. Robotun kararlı yürüyüĢünü sağlamak amacıyla yumuĢak yürüyüĢ referanslarını kullanmıĢlardır. Zemin darbe telafisi, erken basma referans yörüngesi iyileĢtirmesi, ayak yönelim kontrolü ve bağımsız eklem konum kontrolü kullandıkları ana kontrol algoritmalarıdır. Ayrıca mekanik tasarım esaslarını ve bileĢenlerini tanımlamıĢlardır. Algılayıcı sistemlerini ve geri besleme kontrollerindeki rollerini tartıĢmıĢlardır. Yürüme deney sonuçlarının, kullanılan kontrolörlerin kararlı bir yürüme elde etmede baĢarılı olduğunu göstermiĢlerdir. Bunların yanı sıra, robotun mekanik sisteminin, kontrol donanımının ve kullanılan algılayıcıların yürüme deneyleri için uygun olduğu da onaylamıĢlardır.
Zlajpah (2008), makalede simülasyonun 20. yy.‟ın baĢlarından beri kabul edilen önemli bir araĢtırma konusu olduğunu ve bilgisayarın geliĢimiyle birlikte simülasyon için verimli zamanın baĢladığını çalıĢmasında belirtmiĢtir. ġuan simülasyonun, etkili bir canlandırma, planlama ve strateji aleti olarak çeĢitli sahalarda araĢtırma ve geliĢtirme unsuru olarak kullanıldığını, robotik biliminde de önemli bir role sahip olduğunu söylemiĢtir. Ayrıca çeĢitli metotların, robot manipülatörünün dinamik ve kinematik analizlerini elde etmede, çevrimdıĢı programlamada, değiĢik kontrol algoritmaları tasarlamada, ve proses adımlarını düĢünürken v.s. kullanıldığını belirtmiĢtir.
Dumanay (2009), çalıĢmasında Elektrik-Elektronik ve diğer mühendisliklerde verilmekte olan kontrol dersleri için bir uzaktan kontrol laboratuarı gerçekleĢtirmiĢtir. PID, Bulanık Mantık ve Kayan Kip gibi farklı kontrolörleri DC motorun hız denetimi için baĢarı ile uygulamıĢtır.
Alshamasin (2009), çalıĢmasında gittikçe popüler hale gelen robot simülasyonlarını anlatmıĢtır. Özellikle bilgisayarların fizibilite çalıĢmalarında
animasyonların ve çevrimdıĢı programların tanıtılması konularını iĢlemiĢtir. Ayrıca bu çalıĢmasında servo motorlarla çalıĢan bir scara tipi robotun matematiksel modelini dinamik simülasyonlarla geliĢtirmiĢtir. Kinematik denklemlerini Denavit-Hartenberg yöntemini kullanarak türetmiĢtir. DC servo motorlarla tahrik edilen robotla çalıĢmıĢ ve bu robotu modellemiĢtir. Ayrıca robot hareketlerinin dinamik simülasyonlarının doğrulanması ve incelenmesinde Matlab/Simulink programından yararlanmıĢtır. ÇalıĢmasının sonunda ise simülasyon sonuçlarını açıklamıĢtır.
Brogardh (2009), makalesinde gelecekteki robot kontrol geliĢimi üzerindeki senaryolar üzerinde durmuĢtur. Birçok geliĢimin, robot fonksiyonlarını artırmak, harcamaları düĢürmek ve robot performansını iyileĢtirmek için yapıldığını söylemiĢtir. Günümüzün geliĢen endüstrisinin çoklu robot kontrolü, güvenlik kontrolü, kuvvet kontrolü, uzaktaki nesneleri gözetleme ve kablosuz iletiĢim gibi konular üzerine yoğunlaĢtığını, gelecekteki robot geliĢiminin otomotiv endüstrisindeki yeni robot uygulamalarında, küçük ve orta ölçekli iĢletmelerde (kobi), dökümhanelerde, gıda endüstrisinde, geniĢ fabrikalarda ve proseslerde yer alabileceğini çalıĢmasında belirtmiĢtir.
Tokel (2009), tez çalıĢmasında dört eksen ve bir tutucu‟ya sahip olan bir robot manipülatör ve robotun kontrolü için mikroiĢlemci ailesinden PIC kullanarak bir servo motor sürücü kartı tasarlamıĢtır. Bu tez için kullanılan altı servo motoru sürebilen sürücü kartı ve seri haberleĢme için kullanılan kartı, baskı devre tekniğini kullanarak üretmiĢtir. Visual Basic programını kullanarak bir arayüz oluĢturmuĢ ve robotun bilgisayardan bu arayüzle kontrolünü sağlamıĢtır. Motor sürücü kartı ve seri haberleĢme için kullanılan kartı bilgisayar ortamında tasarlamıĢtır. Ġlk önce breadboard‟a kurulan devreler ile çalıĢmalar yapmıĢ, bu çalıĢmaların neticesinde robotun motorlarını sürmek için uygun bir sürücü kartı tasarlamıĢtır. Robot kolun yapımında alüminyum kompozit malzeme seçmiĢ, ana gövde ve uzuvlar CNC‟de imal edilmiĢtir.
Aksungur ve Kavlak (2009), bu çalıĢmada iki dönel ve bir lineer mafsala sahip üç serbestlik dereceli SCARA tipi bir robotun ters kinematik analizini yapmıĢlardır. Robotun çalıĢma alanına engel yerleĢtirerek hareketini incelemiĢler, çarpıĢma olup olmadığını gözlemlemiĢler ve robot kolunun dönme yönünü belirlemiĢlerdir. Hedef ve engel koordinatlarını rastgele seçilen iki bin adet örnek oluĢturarak, bu iĢlemi her örneğe uygulamıĢlardır. Sonuçta elde edilen hedef ve engel koordinat değerlerini yapay sinir ağı (YSA) için giriĢ, hesaplanan mafsal açı değerlerini de çıkıĢ seti olarak belirlemiĢlerdir. Eğitim için çok katmanlı geri yayılım ağını ve aktivasyon fonksiyonu
olarak da sigmoid fonksiyonunu kullanmıĢlardır. Kabul edilebilir hata değerine ulaĢarak ağın eğitimini tamamlamıĢlardır. Ġstenen ve YSA ile hesaplanan değerler için karĢılaĢtırma grafiğini çizerek sonuçların uygun olduğunu gözlemlemiĢlerdir.
Eroğlu ve ark. (2009), çalıĢmalarında bir robot manipülatörünün konum takip kontrol problemi üzerinde durmuĢlardır. Kullandıkları yöntem bulanık mantık destekli uyarlamalı denetim olup, tam mertebeli ancak tam olarak lineer parametrelerine ayrılamayan robot dinamikleri için adaptif kontrol tekniklerinden yararlanmaya dayanmaktadır. Özellikle istedikleri uyarlamalı denetim kanunu tabanlı bir bulanık mantık destekli uyarlamalı pozisyon takip denetleyicisini tasarlayarak, robot dinamiklerindeki belirsizliklere rağmen, global olarak mutlak sınırlı link pozisyon izlemesini elde etmiĢlerdir. Simülasyon sonuçlarıyla uyguladıkları denetleyicinin baĢarısını göstermiĢlerdir.
Tınkır (2010), doktora çalıĢmasında, yatay düzlemde dönen, uç noktasında basit sarkaç asılı olan elastik kolun konum ve uç noktası titreĢim kontrolü ile asılı sarkacın salınım kontrolünü yapmıĢtır. ÇalıĢması kapsamında, ele alınan sistemin deney düzeneğini oluĢturmuĢtur. Sistemin dinamik modelini Lagrange hareket denklemiyle, MATLAB/Simulink yazılımı ile Solidworks programında oluĢturduğu katı modeli kullanarak elde etmiĢtir. Elastik kolun konum ve titreĢim kontrolü ile sarkaç salınım kontrolü için PID, hiyerarĢik yapay sinir ağı tabanlı adaptif bulanık mantık ve yapay sinir ağı tabanlı adaptif aralık tip-2 bulanık mantık kontrolcüleri geliĢtirmiĢtir. GeliĢtirdiği kontrolcülerin her birinin kullanılması durumu için sayısal simülasyonlar ve deneysel ölçümler yaparak elastik kol konum açısı, uç deplasmanı ve sarkaç salınım açılarını elde etmiĢtir. Sayısal simülasyon ve deneysel ölçüm çalıĢmalarında elde ettiği sonuçların ıĢığında geliĢtirdiği kontrolcülerin performansını mukayese ederek, geliĢtirdiği kontrolcülerin performansını literatürde bulunan çalıĢmalara ait sonuçlarla karĢılaĢtırmıĢtır.
Köse (2010), tez çalıĢmasında, bulanık mantık ve yapay sinir ağları tekniklerinin eğitiminde ve bu tekniklerle ilgili araĢtırma çalıĢmalarında kullanılabilen, etkili bir uygulama yazılımı geliĢtirmiĢtir. ÇalıĢma sayesinde, ilgili tekniklerin öğretiminde kullanılabilen, örnek çalıĢmaların yürütülebildiği, güçlü bir “eğitim yazılımı” sunulması amaçlanmıĢtır. Köse, yazılımın yapısını, C# programlama dili aracılığıyla, nesneye yönelik programlama tekniklerinin avantajlarını bir araya getirerek oluĢturmuĢtur. Ayrıca bu yazılım, ilgili alanda gerçekleĢtirilmiĢ olan, Türkçe ara yüzlü, ender çalıĢmalardan birisidir.
Duran ve Ankaralı (2010), çalıĢmalarında üç serbestlik dereceli PUMA tipi robot kolunun uç elemanının PID yöntemi ile yörünge kontrolünü yapmıĢlardır. ÇalıĢmanın ilk aĢamasında, robota ait kinematik ve dinamik denklemleri elde etmiĢlerdir. Yörünge planlanmasını kartezyen koordinatlarda yapmıĢlardır. Yörüngenin istedikleri gibi gerçekleyebilmek için gerekli mafsal değiĢkenlerini ters kinematik analizle hesaplamıĢlardır. Yörüngeyi izlemek üzere tasarladıkları kontrolcüye, dinamik analiz sonucu elde ettikleri servo motor torklarını sisteme dıĢ bozucu etki Ģeklinde dahil etmiĢlerdir. PID kontrol yöntemini uyguladıkları sisteme, sikloid, harmonik ve polinom yapılı üç farklı yol alma fonksiyonunu giriĢ olarak kabul etmiĢler ve elde ettikleri sistem cevaplarını istedikleri yörüngeye yakınsaması açısından karĢılaĢtırmıĢlardır. KarĢılaĢtırmaları sonucunda, harmonik yol alma fonksiyonun daha avantajlı olduğunu gözlemlemiĢlerdir.
Görel ve AltaĢ (2010), çalıĢmalarında iki eklemli düzlemsel bir manipülatörün esnekliğinin dairesel bir iĢ yörüngesi üzerindeki hareketini Bulanık Mantık Denetimini (BMD) kullanarak incelemiĢlerdir. Gözlemleri ve incelemeleri sırasında BMD‟nin yapısına genel olarak değinmiĢlerdir. Çift kollu robot sisteminin matematiksel modelini ve bunun kontrolünde kullandıkları BMD heuristik algoritmalarını MATLAB/SIMULINK ortamında modelleyerek gerekli incelemeleri yapmıĢlardır. Tasarladıkları BMD‟nin performansını aynı ortamda modelledikleri PI denetleyicinin performansıyla karĢılaĢtırarak önerdikleri BMD denetleyicinin doğruluğunu değerlendirmiĢlerdir. Sonuç olarak çift kollu bir robotun kol hareketlerini Bulanık Mantık Denetimi ile sağlamıĢlardır. Elde ettikleri sonuçları PI denetimi ile kıyaslayarak iki kontrol yöntemi arasındaki farkı belirlemiĢlerdir. Belirledikleri farklara göre BMD‟nin PI denetim ve denetimsiz duruma göre çok daha avantajlı olduğu sonucuna varmıĢlardır.
3. MATERYAL VE METOD
Ġki DC motorla tahrik edilen iki serbestlik dereceli sisteme ait hareket denklemleri elde edilirken, Lagrange-Euler formülasyonu kullanılmıĢtır. Uzuvların kinetik ve potansiyel enerji terimleri birleĢtirilerek tüm sisteme ait hareket denklemleri bulunmuĢtur. Ġnsan adım atma hareketinde eklem açılarının değiĢimi için literatürden elde edilen referans veriler kullanılmıĢtır. Ayrıca farklı kaynaklardan sağlanan DC motorlar, PID ve Bulanık Mantık kontrol ile ilgili teorik bilgilerden çalıĢmada azami ölçüde faydalanılmıĢtır. Simülasyon çalıĢmaları, DC motorun matematiksel modeli ve adım atma hareketinin referans verileri göz önüne alınarak yapılmıĢtır. Sistemin kontrolü için bu referans değerler esas alınmıĢtır. Simülasyonlarda MATLAB/Simulink hazır paket programı kullanılmıĢtır. Sistemin PID kontrolü için MATLAB/Simulink/Library‟den PID kontrolcü alınarak sistem modeline ilave edilmiĢtir. Bulanık mantık kontrolcü tasarımı ise MATLAB/Fuzzy Logic Toolbox kullanılarak yapılmıĢtır. Ayrıca oluĢturulan model MATLAB/SimMechanics programında kullanılmıĢ, eklemlerin ve uzuvların hareketleri gözlenmiĢtir. Simülasyon sonuçları irdelenmiĢ ve tartıĢılmıĢtır. Simülasyon çalıĢmalarında kullanılan kontrolcülerin zaman cevapları grafikler halinde sunulmuĢtur.
4. MEKANĠZMANIN KĠNEMATĠĞĠ VE DĠNAMĠK ANALĠZĠ
4.1. Mekanizmanın Kinematiği
Eklemler, referans koordinat takımına göre ya dönme hareketi yaparlar ya da yer değiĢtirirler. Bu nedenle uç elemanın üç boyutlu uzaydaki toplam yer değiĢtirmesi, uzuvların açısal dönmeleri ve doğrusal ötelenmeleri sonucu oluĢur. Denavit-Hartenberg (1955), bir metot geliĢtirerek referans eksen takımına göre uzuvların uzaysal geometrisinin matris cebri ile gösterilmesini sağlamıĢlardır. Bu metot 4x4 homojen dönüĢüm matrislerini kullanarak birbirine komĢu iki mekanik uzva ait uzaysal iliĢkileri tanımlar. Bu 4x4 homojen dönüĢüm matrisleri aynı zamanda kollara ait dinamik denklemlerin elde edilmesinde de oldukça faydalıdır. Mekanizmanın kinematiği, hareketin geometrisinin sabit referans koordinat sistemine göre zamanın fonksiyonu Ģeklinde analitik olarak incelenmesinden ibarettir. Bu çalıĢma esnasında harekete neden olan kuvvetler ve momentler ile ilgilenilmez. Mafsallardan verilen hareketler sonucu eklemin uç noktası istenen konuma götürülür. Uygulamalarda genellikle uç noktanın üç boyutlu koordinat sisteminde sabit yer koordinatlarına göre tanımının yapılması istenir.
Düz kinematik analizde mekanizma için kollara ait açılar ve geometrik kol parametreleri verilir ve uç noktanın sabit eksen takımlarına göre pozisyonu ve yönlenmesi nedir sorusunun cevabı aranır. Mekanizma kolunun geometrik link parametreleri ve zamanla değiĢen eklem değerleri (θi, di ) kullanılarak uç elemanın
pozisyon ve yönlenmesinin hesaplanması düz kinematik olarak adlandırılmaktadır. Yani eklemlerin dönme açıları verilerek sistemde gidecekleri x, y ve z koordinatlarını elde etmek için kullanılan analizdir.
Sistemin geometrik link parametreleri Çizelge 4.1‟de verilmiĢtir. Parametrelerin tanımları:
di: Eklem ekseni boyunca ölçülen normaller arasındaki mesafedir.
θi: Normaller arasındaki eklem eksenine dik düzlemde ölçülen açıdır.
ai: Eklem eksenleri arasındaki ortak normalleri boyunca ölçülen en kısa
mesafedir.
Çizelge 4.1. D-H kinematik parametreler tablosu
Eklem θi αi ai di
1 -90° 0 l1 0
2 0 0 l2 0
Ters kinematik analizde ise uç noktanın istenilen pozisyonu ve yönlenmesi sabit eksen takımlarına göre kol parametreleriyle birlikte verilerek, kol bu noktaya ulaĢabilir mi sorusunun cevabı aranır. Uç elemanın istenilen bir pozisyona hareket etmesi için eklem değiĢkenlerinin hesaplanması iĢlemine ters kinematik analiz denir. Ġstenen x,y ve z değerleri tanımlanarak, eklemlere verilmesi gereken açılar belirlenir (ġahin, 2006).
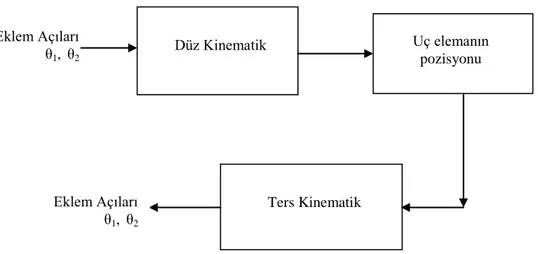
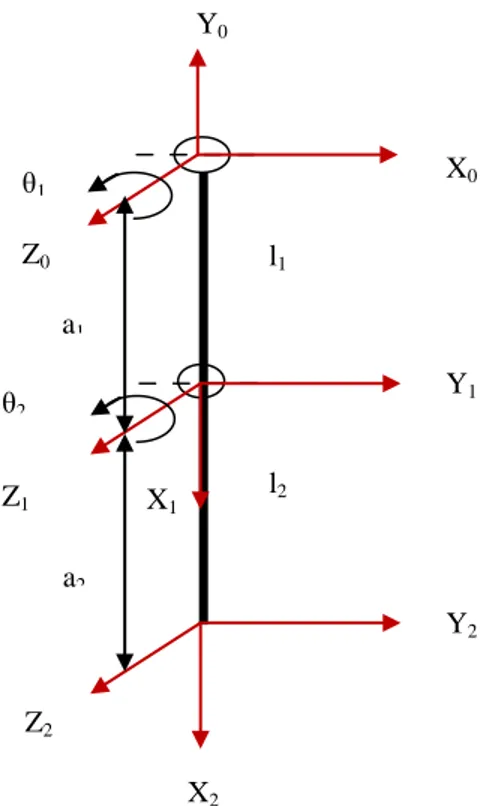
Her iki analizi de özetleyen blok diyagramı ġekil 4.1‟de, mekanizmanın uzaydaki modeli ise ġekil 4.2‟de verilmiĢtir.
ġekil 4.1. Düz kinematik analiz ve ters kinematik analiz blog diyagramı Uç elemanın pozisyonu Ters Kinematik Düz Kinematik Eklem Açıları θ1, θ2 Eklem Açıları θ1, θ2
ġekil 4.2. Mekanizmanın uzaydaki modeli
Elde edilen D-H parametrelerine göre mekanizmanın uç elemanının tabana göre konum ve oryantasyonunu gösterecek dönel mafsal için transformasyon matrisinin genel denklemi,
(4.1)
Burada R: Oryantasyon Matrisi, p : Konum Vektörü, f: Perspektif Transformasyon, 1x1: Ölçek Faktörü. Bu transformasyon matrisinin açılımı,
(4.2) l1 X1 X2 Y2 Z2 X0 Y0 Z0 θ1 θ2 Y1 Z1 l2 a2 a1
Matrisler çarpılarak sadeleĢtirildikten sonra transformasyon matrisi,
(4.3)
Ters kinematik analizde elde edilen D-H parametrelerine göre mekanizmanın uç elemanının tabana göre konum ve oryantasyonunu gösterecek dönel mafsal için elde edilen transformasyon matrisi,
(4.4)
Transformasyon matris elemanları,
(4.5) (4.6) (4.7) (4.8) (4.9) (4.10) (4.11) (4.12)
(4.13)
Eklemlerin konumlarını belirten ifadeler olan px, py, pz,
(4.14)
(4.15)
pz=0 (4.16)
Ters kinematik analiz denklemleri yardımıyla eklem açıları verileri bulunur. ve açıları,
(4.17)
(4.18)
4.2. Mekanizmanın Lagrange-Euler Yöntemiyle Dinamik Analizi
Dinamik analiz, hareket denklemlerinin matematiksel formülasyonu ile ilgilenir. Dinamik denklemler, uzuvların dinamik davranıĢını tanımlayan matematiksel denklemler grubudur. Bu denklemler, eklem hareketinin bilgisayar simülasyonu, uygun kontrol denklemlerinin tasarımı, kinematik tasarım için oldukça faydalıdır. Gerçek dinamik model, yaygın olarak bilinen Newton mekaniği ve Lagrange mekaniği gibi fiziksel kanunlardan elde edilebilir. Bu kanunların uygulanmasıyla, değiĢik sayıda eklemli mekanizma kollarının geometrik ve atalet parametrelerine göre hareketlerinin dinamik denkleminin elde edilmesi mümkündür. Klasik olarak Lagrange-Euler (L–E) ve Newton-Euler (N–E) formülasyonları hareket denklemlerini elde etmek için kullanılabilir. Elde edilecek hareket denklemleri fiziksel sistemin dinamik davranıĢını tanımlayacağından bu anlamda birbirine eĢdeğerdir. L–E formülasyonuna göre dinamik modelin elde edilmesi, diğerlerine göre basit ve sistematiktir. Ġleri seviyede ilgili kontrol stratejilerinin tasarım ve analizinde kullanılabilir. Aynı zamanda, bu denklemler ileri dinamik problemlerinin (düz dinamik-ters dinamik) çözümü için kullanılabilir. Öyle ki,
arzu edilen moment ve kuvvetler verilirse, dinamik denklemler mafsal ivmelerinin çözümü için kullanılır. Daha sonra integre edilerek mafsalın genelleĢtirilmiĢ koordinatlarının ve hızlarının hesaplanması için kullanılır (ġahin, 2006).
Mekanizma ġekil 4.3‟de Ģematik olarak görülmektedir. Çubuklar homojen olduğu için kütle merkezleri (G1, G2) orta noktalarıdır ve eksen takımının koordinatları,
ġekil 4.3. Mekanizmanın Ģematik görünümü
(4.19)
(4.20)
(4.21)
(4.22)
K, sistemin toplam kinetik enerjisi ve P sistemin toplam potansiyel enerjisi olmak üzere Lagrange-Euler denklemi,
L = K – P (4.23) G1 (x1, y1) x G2 (x2, y2) θ1 y θ2 l1 l2
Sistemin toplam kinetik enerji denklemi,
(4.24)
m1, m2 çubukların kütleleri; v1, v2 kütle merkezlerinin hızlarıdır. I1, I2 kütle
merkezlerine göre hesaplanmıĢ kütle atalet momentleridir. Çubuklar homojen olduğuna göre kütle atalet moment denklemi,
(4.25)
Sistemin toplam potansiyel enerji denklemi,
(4.26)
Veriler yerlerine konulduğunda L-E denklemi,
(4.27)
Kütle merkezlerinin hızlarının kareleri,
(4.28)
(4.29)
Koordinatların birinci derece türevleri,
(4.30)
(4.31)
(4.33)
L-E denklemi,
(4.34)
Denklem (4.34) düzenlenirse L-E,
(4.35)
Torkları bulmak için genel L-E denklemi,
(4.36)
Lagrange-Euler denklemindeki ifadesi,
Denklem (4.37)‟in zamana göre türevi,
(4.38) L-E denklemindeki ifadesi,
(4.39)
Denklem (4.39)‟un zamana göre türevi,
(4.40)
L-E denkleminin θ1‟e göre kısmi türevi,
(4.41)
L-E denkleminin θ2‟ye göre kısmi türevi,
Tork denklemleri,
(4.43)
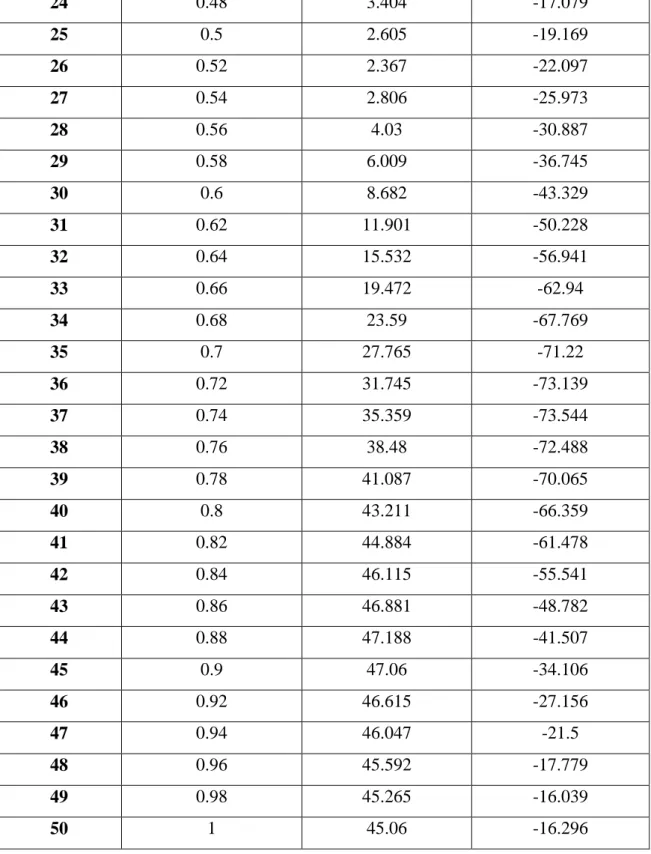
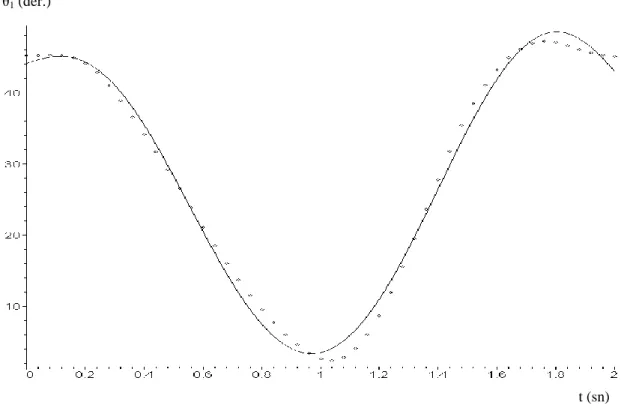
5. ĠNSAN ADIM ATMA HAREKETĠNDE EKLEM AÇILARI VERĠLERĠ
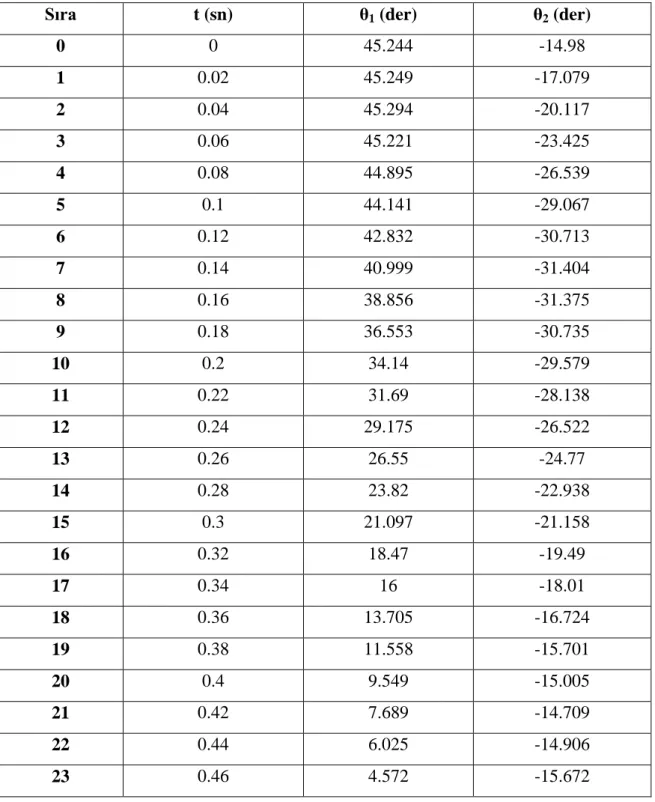
Ġnsanın yürüme hareketindeki adım atma hareketi esnasında oluĢan, deneysel olarak bulunmuĢ kalça ve diz eklem açıları, sırayla θ1 ve θ2 olarak Çizelge 5.1‟de
verilmiĢtir(Kirtley, 2006).θ1 birinci eklem (kalça) açısı ve θ2 ikinci eklem (diz) açısıdır.
Çizelge 5.1. Eklem açıları çizelgesi (Kirtley, 2006)
Sıra t (sn) θ1 (der) θ2 (der)
0 0 45.244 -14.98 1 0.02 45.249 -17.079 2 0.04 45.294 -20.117 3 0.06 45.221 -23.425 4 0.08 44.895 -26.539 5 0.1 44.141 -29.067 6 0.12 42.832 -30.713 7 0.14 40.999 -31.404 8 0.16 38.856 -31.375 9 0.18 36.553 -30.735 10 0.2 34.14 -29.579 11 0.22 31.69 -28.138 12 0.24 29.175 -26.522 13 0.26 26.55 -24.77 14 0.28 23.82 -22.938 15 0.3 21.097 -21.158 16 0.32 18.47 -19.49 17 0.34 16 -18.01 18 0.36 13.705 -16.724 19 0.38 11.558 -15.701 20 0.4 9.549 -15.005 21 0.42 7.689 -14.709 22 0.44 6.025 -14.906 23 0.46 4.572 -15.672
24 0.48 3.404 -17.079 25 0.5 2.605 -19.169 26 0.52 2.367 -22.097 27 0.54 2.806 -25.973 28 0.56 4.03 -30.887 29 0.58 6.009 -36.745 30 0.6 8.682 -43.329 31 0.62 11.901 -50.228 32 0.64 15.532 -56.941 33 0.66 19.472 -62.94 34 0.68 23.59 -67.769 35 0.7 27.765 -71.22 36 0.72 31.745 -73.139 37 0.74 35.359 -73.544 38 0.76 38.48 -72.488 39 0.78 41.087 -70.065 40 0.8 43.211 -66.359 41 0.82 44.884 -61.478 42 0.84 46.115 -55.541 43 0.86 46.881 -48.782 44 0.88 47.188 -41.507 45 0.9 47.06 -34.106 46 0.92 46.615 -27.156 47 0.94 46.047 -21.5 48 0.96 45.592 -17.779 49 0.98 45.265 -16.039 50 1 45.06 -16.296
Çizelge 5.1‟deki sayısal verilere göre diz ve kalça eklemindeki θ1 ve θ2
açılarının değiĢimi ġekil 5.1 ve ġekil 5.2‟deki grafiklerde noktalarla gösterilmiĢtir. Bu noktalardan yaklaĢık olarak geçen matematiksel eğri en küçük kareler yöntemiyle bulunmuĢtur (Chapra ve Canale, 2002).
Burada en uygun eğri olarak altıncı dereceden bir polinom seçilmiĢtir. Yukarıdaki sayısal verilerle ara iĢlemlerden sonra θ1 ve θ2 için ayrı ayrı bulunan
polinomların denklemleri,
(5.1)
(5.2)
Grafiklerdeki noktalar çizelgedeki sayısal değerleri, eğri ise bulunan polinomları göstermektedir. Ġki Ģekil arasında oldukça iyi bir uyum gözlenmektedir.
ġekil 5.1. θ1 Grafiği
t (sn) θ1 (der.)
ġekil 5.2. θ2 Grafiği
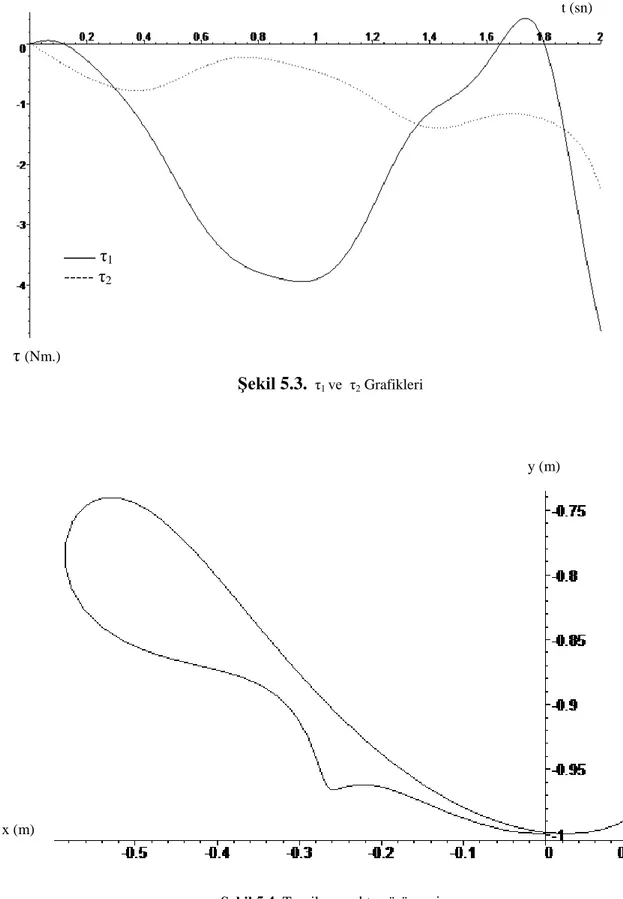
DC motorun çalıĢmasını sağlayan akımın voltajının değiĢimi ile çıkıĢtaki tork değiĢimi elde edilir. Buradaki mekanizmanın eklemlerine konulan DC motorların çıkıĢ torklarının değiĢimi, denklem (4.43) ve denklem (4.44)‟de görüldüğü gibi doğrudan eklemlerdeki açılar ve türevlerine bağlı olarak gerçekleĢmektedir. Eklem açıları olan θ1
ve θ2 için elde edilen bu polinomlar ve türevleri ile sistemdeki diğer parametrelerin
sayısal değerleri denklem (4.43) ve denklem (4.44)‟de yerine konursa her bir eklemdeki motor torklarının bir adım atma hareketi sırasındaki değiĢimleri kontrolsüz olarak ġekil 5.3‟deki gibi olmaktadır. Teorik uç nokta yörüngesinin grafiği ise ġekil 5.4‟de verilmiĢtir.
θ2 (der.)
ġekil 5.3. τ1 ve τ2 Grafikleri
ġekil 5.4. Teorik uç nokta yörüngesi x (m) y (m) τ1 --- τ2 t (sn) τ (Nm.) τ1 --- τ2 t (sn) τ (Nm.)
6. DC MOTORLAR
Birçok alanda mekanik enerji kaynağı olarak genellikle elektrik motoru kullanılmaktadır. Endüstriyel uygulamalarda yaygın olarak kullanılan elektrik motorları yapı olarak birbirlerine göre farklılıklar gösterir. Bu motorlarının ortak yanı; elektrik enerjisini mekanik enerjiye dönüĢtürmeleridir. Endüstride kullanılan otomasyon sistemleri; üretimi daha verimli, daha hızlı ve daha düĢük maliyetli duruma getirmeyi hedeflemektedir. Günümüz teknolojik geliĢmeleri sayesinde, otomasyon teknolojilerinin sanayi tesislerinde yaygın olarak kullanılmasıyla vasıflı insan gücüne olan ihtiyaç azalmıĢ ve daha kaliteli ürünlerin daha hızlı üretilmesi mümkün hale gelmiĢtir. Son yıllarda motor ve motor kontrol sistemlerinden beklenti ve hedef; daha geniĢ hız ayar aralığı, dinamik kalkıĢ-duruĢ, iyi bir hız-moment davranıĢı, hassasiyet ve yüksek verimliliktir. Denetim sistemi uygulamalarında basit sistemler (mekanik, elektrik, akıĢkan, ısıl) daha çok denetlenen sistemin kendisini teĢkil eder. Sistemin bir güç altında çalıĢtırılabilmesi için tahrik elemanına veya eyleyiciye ihtiyaç vardır. Genel anlamda elektromekanik sistemler veya eyleyiciler elektrik enerjisini mekanik enerjiye dönüĢtüren çok uçlu dönüĢtürme elemanları sınıfındandır. Eyleyiciler genelde AC ve DC akım ile sürülmekle beraber geri beslemeli denetim sistemlerinde DC ile çalıĢan eyleyiciler tercih edilir. Hassas konum denetimi gereken yerlerde daha çok DC motorları kullanılır (Yüksel, 2009).
DC motorların hareketleri düzgün, kesin ve güçlüdür. Hızları kolaylıkla değiĢtirilebilir. Bu tip motorun en büyük kusuru, bir kolektörü akımla besleyebilmek için fırçaların kullanılması zorunluluğudur. Fırçalar bu iĢi kolektöre sürtünerek gerçekleĢtirir. Dolayısıyla kolektörü hem aĢındırır, hem de kıvılcım üretir. Bu nedenle doğru akım motorları tümüyle kapalı bir çerçevenin içinde bulundurulur ve içeriye toz veya nem girmesine izin verilmez. Buna karĢılık, doğru akım motorlarının çok geniĢ bir çalıĢma düzenine sahip olma gibi bir üstünlüğü vardır. Doğru akım motorlarının yapısı endüktör, endüvi, kolektör, fırçalar yataklar ve diğerleri olarak bahsedilebilir. Endüktör (Kutup), doğru akım motorlarında manyetik alanın meydana geldiği kısımdır. Endüktöre kutup da denilmektedir. Kutup uzunluğu yaklaĢık olarak endüvi uzunluğuna eĢittir. Endüktörler tabii mıknatıslarla yapıldığı gibi, kutuplara sargılar sarılarak, bu sargıların enerjilendirilmesiyle mıknatıslık özelliği kazandırılmıĢ elektromıknatıslardan da yapılabilir. Endüvi, gerilim indüklenen ve iletkenleri taĢıyan kısımdır. Kolektör, doğru akım motorlarında endüviye uygulanacak gerilimin iletilmesini kolektörler sağlar.
Fırçalar, doğru akım motorlarında dıĢ devredeki akımı endüviye iletebilmek için fırçalar kullanılır. Doğru akım makinelerinde aĢınma ve iyi komütasyon elde etmek için saf bakır fırça kullanılmaz. Fırçalar makinenin akım Ģiddeti ve gerilimine göre sert, orta sert ve yumuĢak karbon veya karbon alaĢımından yapılır. Mümkün olduğu kadar bir motorda aynı cins fırçalar kullanılmalı ve fırça boyları da eĢit olmalıdır. Fırçalar dik ve yatay olarak yapılırlar. Yatakların görevi motorun hareket eden kısımlarının mümkün olduğu kadar az kayıpla gürültüsüz ve bir eksen etrafında rahatça dönmesini sağlamaktır. Doğru akım motorlarında bilezikli yataklar ve rulmanlı (bilyalı ve makaralı) yataklar kullanılır (Demircioğlu, 2006).
6.1. Göbek Sargısı Denetimli DC Motorun Matematiksel Modeli ve Transfer Fonksiyonu
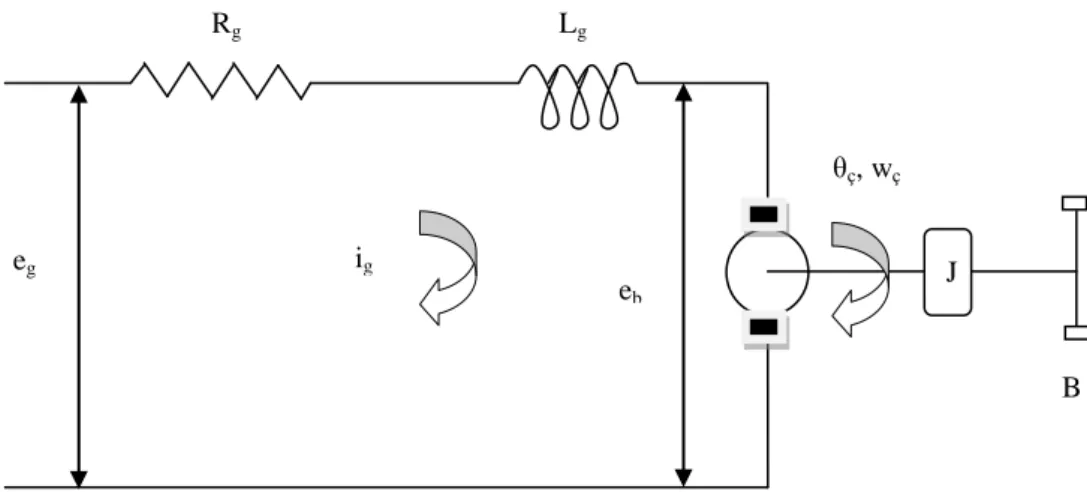
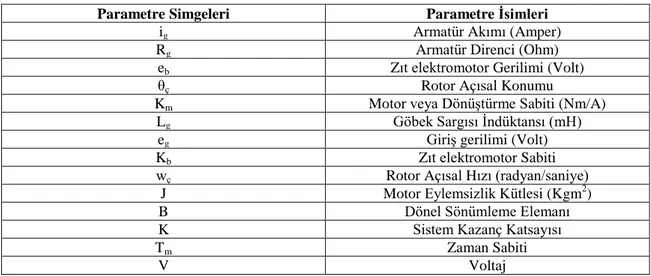
Temelde dinamik davranıĢı açısından tüm elektromekanik sistemler benzer özellikler içerir. Elektromekanik sistemlerin elektromıknatıs kısmı bir bobin ve onun etrafında yer alan ferro-mıknatıs malzemeden oluĢur. Belli sayıda sarılmıĢ tel kangaldan ibaret bobin ise ardıĢık bağlı R, L devresi Ģeklinde modellenebilir. Bu durum tüm elektromekanik sistemler için ortaktır. ġekil 6.1‟de göbek veya rotor sargısından denetimli bir DA motorunun basitleĢtirilmiĢ modeli verilmiĢtir. Motorun alan sargısı ise sabit akımla beslenir. Bir doğru akım motorunun içerdiği parametrelerin açıklamaları ve birimleri Çizelge 6.1‟de verilmiĢtir (Yüksel, 2009).
ġekil 6.1. Göbek sargısı denetimli DC motoru (Yüksel, 2009) ig eg Rg Lg eb B J θç, wç
Çizelge 6.1. Bir DC motorunun içerdiği parametreler ve açıklamaları
Parametre Simgeleri Parametre Ġsimleri
ig Armatür Akımı (Amper)
Rg Armatür Direnci (Ohm)
eb Zıt elektromotor Gerilimi (Volt)
θç Rotor Açısal Konumu
Km Motor veya DönüĢtürme Sabiti (Nm/A)
Lg Göbek Sargısı Ġndüktansı (mH)
eg GiriĢ gerilimi (Volt)
Kb Zıt elektromotor Sabiti
wç Rotor Açısal Hızı (radyan/saniye)
J Motor Eylemsizlik Kütlesi (Kgm2)
B Dönel Sönümleme Elemanı
K Sistem Kazanç Katsayısı
Tm Zaman Sabiti
V Voltaj
Rotor değiĢken mıknatıs alanı içinde dönmeye zorlandığından bobinin üzerinde akımın akıĢını zorlaĢtırıcı yönde bir zıt eb, emk meydana gelir. Buna göre sargı uçlarına
uygulanan eg gerilim değiĢimine karĢılık oluĢan akım değiĢiminin yarattığı mıknatıs
akısı, eg gerilimine ters yönde bir eb gerilim farkı yaratır. Bu durumda L ve R devresi
üzerinde akım değiĢimini oluĢturan gerilim eg-eb fark gerilimine eĢittir. Sistemin
elektriksel kısmında eg-eb fark gerilimi değiĢimine karĢılık meydana gelen akımı
değiĢimi arasındaki bağıntı ve Laplace dönüĢümü,
(6.1)
(6.2)
Burada eb zıt e.m.k rotorun hızı ile orantılı olup doğrusallaĢtırılmıĢ bağıntısı ve
Laplace dönüĢümü,
(6.3)
(6.4)
Diğer taraftan akım değiĢimine karĢılık meydana gelen döndürme momenti,
(6.6)
Mekanik kısmın diferansiyel denklemi ve Laplace dönüĢümü,
(6.7)
(6.8)
Sistemin transfer fonksiyonu,
(6.9)
Elde edilen transfer fonksiyonu ikinci dereceden olmakla beraber sistemin elektriksel kısmı ile mekanik kısmına ait parametreler birbiriyle bağlantılı haldedir. Bu sistemin elektriksel kısmı ile mekanik kısmı arasındaki etkileĢimin bir sonucudur. Elektriksel kısımdaki değiĢimler mekanik kısımda değiĢimler doğurur. Diğer taraftan mekanik kısımdaki dönme hareketi zıt emk oluĢturarak sistemin elektriksel kısmı üzerinde etkili olmaktadır. Sistem kazancı,
(6.10)
Göbek sargısı indüktansı Lg genellikle çok küçük olduğundan pratikte ihmal
edilebilir. Lg yaklaĢık olarak sıfır alınırsa transfer fonksiyonu,
(6.12)
(6.13)
ġekil 6.2‟de bir doğru akım motorunun blok diyagramı verilmiĢtir. Simülasyonda kullanılan DC motor parametreleri ise Çizelge 6.2‟deki gibidir.
ġekil 6.2. Göbek sargısı denetimli motorunun blok Ģeması (Yüksel, 2009)
Çizelge 6.2. DC motor parametreleri (Görel ve AltaĢ, 2010)
Parametreler Sayısal Değerler
V 36 (V) Rg 1.4 (Ohm) Km 0.095(Nm/A) Lg 0.0805 (mH) Kb 0.76 J 0.0007432 (Kgm2) B 0.000431 (V.s/rad) K 1.3049 Tm 0.0143 Eg(s) Eb(s) - Ig(s) M(s) θç(s) +
7. KONTROL YÖNTEMLERĠ
Matematiksel modelini belirlediğimiz bir sistemi kontrol etmek için kullanılabilecek kontrol yöntemleri:
- Açık çevrim kontrol yöntemleri: Kontrol iĢareti çıkıĢ iĢaretinden etkilenmeyen sistemlere açık çevrim kontrol sistemler denir. Blok diyagramı aĢağıdaki Ģekilde gösterilen açık çevrim kontrol sistem parametrelerindeki değiĢiklikler ya da sisteme etkiyen bozucular nedeniyle sistem çıkıĢında oluĢabilecek olan değiĢiklikleri algılayamaz (Paraskevopoulos, 2002)
ġekil 7.1. Açık çevrim kontrol sistemi blok diyagramı
- Kapalı çevrim kontrol yöntemleri: Sisteme etkiyen kontrol iĢaretinin sistem çıkıĢının da göz önüne alınarak üretildiği kontrol sistemlerine kapalı çevrim sistemi denir. Kontrol yöntemlerinin birçoğu kapalı çevrim kontrol içerisine girmektedir. Bu çalıĢmada kapalı çevrim kontrol yöntemlerinden PID kontrol ve bulanık mantık yöntemiyle kontrol tercih edilerek mukayeseleri yapılmıĢtır.
ġekil 7.2. Kapalı çevrim kontrol blok diyagramı
Bu yöntemlerin amaçları:
- Süreçlerdeki fiziksel çıkıĢ büyüklüğünü arzulanan düzeyde tutmak.
- Süreçlere iliĢkin fiziksel çıkıĢların belli bir değiĢim formunu izlemelerini sağlamak. - ArdıĢık lojik mantığına sahip süreçlerin kontrolünü gerçekleĢtirmektir (Bolton, 1998).
GiriĢ ÇıkıĢ Kontrolör Sistem Geri Besleme + - GiriĢ ÇıkıĢ Kontrolör Sistem
8. PID KONTROL
PID kontrolü orantı, integral ve türev temel denetim etkilerini birleĢtiren sürekli denetim yordamıdır. Yani bu denetimde sürekli olarak hata mevcut olduğu sürece denetim komutu da mevcuttur. PID günümüzde çok kullanılan bir kontrol yöntemidir. Çok geniĢ bir uygulama alanının olmasına rağmen PID uygulamaları için standart bir tanımlama yoktur. PID denetiminde yer alan P, I ve D harfleri Ġngilizce Proportional, Integral ve Derivative (orantı, integral ve türev) kelimelerinin baĢ harflerinden meydana gelir. PID denetimi genelde en basit yapıda denetleyici olarak bilinir ve pek çok endüstriyel uygulamada yeterli ve uygun bir denetim sağlar. Diğer taraftan PID denetimi günümüzde karmaĢık yapılı tüm sistemlere uygulanamamaktadır. Bu denetim daha çok doğrusal ve basit yapıda tek döngülü sistemlere kolaylıkla uygulanabilmektedir. Genelde kararsız sistemleri sadece PID denetimi yoluyla kararlı hale getirilmesi pek mümkün olmamaktadır. PID denetim; üç temel denetim etkisinin üstünlüklerinin tek bir birim içinde birleĢtiren bir denetim etkisidir. Ġntegral etki sistemde ortaya çıkabilecek kalıcı durum hatasını sıfırlarken türev etkide, yalnızca PI denetim etkisi kullanılması haline göre sistemin aynı bağıl kararlılığı için cevap hızını artırır. Buna göre PID denetim organı sistemde sıfır kalıcı-durum hatası ile hızlı bir cevap sağlar. ġekil 8.1‟de klasik PID denetim yapısının blok Ģeması görülmektedir.
Standart PID denetim yasasına bağlı m(t) denetim sinyali çıkıĢı,
(8.1)
Üç temel denetim etkisinin toplamı denklem (8.1)‟deki gibi ifade edilir ve buradan da transfer fonksiyonu,
(8
.2)Sistemin davranıĢını en iyi Ģekilde değiĢtiren kontrol o sistem için en iyi en ideal kontroldür. Bir sistemin kontrolünde, kontrolörden iyi bir kontrol elde edebilmek için kontrol organının en uygun biçimde ayarlanması gerekir. Kontrol organının tipine bağlı olarak, orantı kazancı Kp‟nin, integral kazancı Ki‟nin ve türev kazancı Kd‟nin en uygun
Ģekilde ayarını sağlayan yöntemler mevcuttur. Kontrol edilen sistem karakteristiklerinin yaklaĢık olarak bilinmesi halinde Kp, Ki ve Kd‟nin ayarlanması gerektiği değerleri
belirlenebilir. Bu parametrelerin nihai değerlerinin ayarı sistemin kalıcı durum ve dinamik davranıĢı arasında bir uyuĢma sağlayacak Ģekilde saptanır. Kontrol organı ayarında genelde analitik ve deneysel olmak üzere iki yol mevcuttur. Kontrol organının tipi, kontrol edilen sistem ve ölçme elemanı dinamik davranıĢlarının bilinmesi halinde, kontrol organı tipine göre mevcut bulunan Kp, Ki ve Kd parametrelerinin en uygun
değeri analitik olarak hesaplanabilir. Bu hesaplamalarda bir takım optimizasyon ölçütleri kullanılır. Hesaplar teknik yönden mümkün olmakla beraber iĢlemler oldukça karıĢık ve zordur. Basit hallerde dahi bilgisayar çözümlerine gerek olmakta ve çeĢitli sayısal veya analog hesap yöntemleri kullanılmaktadır. Kontrol organı ayarında analitik yol fazla karmaĢık ve uzun olduğundan uygulamalarda daha çok deneysel yöntemler kullanılır (Tınkır, 2010).
PID denetleyici tasarımında istenilen tepkiyi elde etmek için: 1. Açık döngü tepkisi bulunur ve ihtiyaçlar belirlenir.
2. Yükselme zamanını düzeltmek için oransal denetleyici eklenir. 3. AĢmayı düzeltmek için türevsel denetleyici eklenir.
4. Kararlı hal hatasını yok etmek için integral denetleyici eklenir.
8.1. PID Parametrelerinin Ayarlanması
Sistemin istenilen Ģekilde çalıĢabilmesi için PID parametrelerinin ayarlanması gerekmektedir. Parametre ayarı, elle ayarlama ve parametrelerin hesaplanması yöntemi olan Ziegler-Nichols metodu ile yapılır. Ziegler-Nichols metodu iki Ģekilde uygulanır:
8.1.1. Ziegler-Nichols basamak cevabı yöntemi
Bu yöntemin esası açık-döngülü sistemin basamak giriĢ cevabını incelemektir. Denetim sistemi döngüsü denetim sistemi ile denetlenen sistem arasındaki herhangi bir noktadan açılır. Denetim organı elle ayar konumunda iken sisteme bir basamak giriĢ uygulanır ve ġekil 8.2‟deki gibi bir cevap eğrisi elde edilir.
ġekil 8.2. Ziegler-Nichols basamak cevabı yönteminde kullanılan sistem çıkıĢı parametrelerinin belirlenmesi (Yüksel, 2001)
Bu yöntemde ġekil 8.2‟de görüldüğü gibi sadece iki parametre (a , θ) kullanılır. Burada a maksimum eğimi, θ gecikme zamanını göstermektedir. Sistem çıkıĢının, referans değeri k‟nın % 63‟ üne geldiği süre, τ zaman sabiti olarak gösterilir. Bu yöntemde kontrolör ayar değerleri Çizelge 8.1‟deki ifadelerden hesaplanır.
Çizelge 8.1. Ziegler-Nichols basamak cevabı yönteminde kullanılan sistem çıkıĢı parametrelerinin belirlenmesi (Sarı, 2005)
Denetleyici Kp Ti Td
P 1/a --- ---
PI 0.9/a 1/3θ ---
PID 1.2/a 1/2θ 2/θ
Sistemde kontrolör olarak sadece P denetleyici bulunması durumunda Çizelge 8.1‟de görüldüğü gibi Kp değeri 1/a olurken, sistemde kontrolör PI varken 0.9/a ve
sistemde PID kontrolör bulunması durumunda ise 1.2/a olmaktadır. Kp‟nin bu değer
değiĢimleri P tek baĢına yada diğer kontrolörlerle birlikte kullanılmasındandır. Kp için
bahsedilen aynı durumlar Ti ve Td için de geçerlidir.
8.1.2. Ziegler-Nichols frekans cevabı yöntemi
Bu yöntemde baĢlangıçta integral ve türev etkiler devre dıĢı bırakılıp sistemde sadece oransal etki varken, Kp sürekli salınım elde edilinceye kadar yavaĢ yavaĢ artırılır.
Sürekli salınıma ulaĢılınca Kp=Kc olur. Bu salınımdan kritik kazanç (Kc) ve kritik
frekans (ωc) değerleri Kp=Kc ve salınım frekansı = ωc olarak bulunur. Buradan elde
edilen Kc ve Tc=2π/ωc bilgileri kullanılarak Çizelge 8.2‟den P, PI ve PID kontrolörlerin
ayar değerleri hesaplanır.
Çizelge 8.2. Ziegler-Nichols frekans cevabı yönteminde kullanılan sistem çıkıĢı parametrelerinin belirlenmesi (Sarı, 2005)
Denetleyici Kp Ti Td
P 0.5Kc --- ---
PI 0.45Kc 0.825Tc ---
PID 0.6Kc 0.5Tc 0.125Tc
Sistem kontrolörü sadece P denetleyici iken Çizelge 8.2‟de görüldüğü gibi Kp
değeri, 0.5Kc olurken, sistem kontrolörü PI iken 0.45Kc ve sistem kontrolörü PID iken
0.6Kc olmaktadır. Kp‟nin bu değer değiĢimleri P tek baĢına yada diğer kontrolörlerle
9. BULANIK MANTIK KONTROL
9.1. Bulanık Mantık Kontrolün Tarihçesi
Matematik deyince akla ilk gelen kesinliktir. Halbuki günlük hayatta konuĢmalarımız arasında belirsizlik içeren, orta yaĢlı insan, pahalı araba, yüksek bina gibi anlamı kiĢiden kiĢiye ve duruma göre değiĢen kelimeler kullanılır. Klasik mantığın tanımlayamadığı bu tür belirsizlikler çoğunlukla bilimsel olmayan bir Ģey olarak kabul görmesine rağmen, 19. yüzyılın baĢlarında bu tür belirsizlikler üzerine birçok filozof kafa yormuĢlardır. Pek az filozof çok değerliliği benimsemesine rağmen Lukasiewicz ve Black, ilk çok değerli mantık ve kümeler üzerine teorik olarak çalıĢmalarını sürdürdüler. Ancak kendilerine bir uygulama alanı bulamadılar. Belirsizliğin modern anlamda matematiksel olarak modellenmesinde önemli bir dönüm noktası, 1965‟te California Berkeley Üniversitesinden Azeri kökenli Amerikalı matematikçi Lotfi A. Zadeh‟in bulanık mantık (fuzzy logic) ve dolayısıyla bulanık küme teorisini tanımlamasıyla baĢlamıĢtır. Zadeh, çok değerli küme teorisi geliĢtirip matematiğin dil ve insan zekasını iliĢkilendirebileceğini ve bulanık mantığın gerçek hayatın daha iyi bir modelini oluĢturduğunu gösterdi. 1965‟te bulanık küme kavramı ve 1968‟de bulanık algoritmalar, 1970‟te bulanık karar verme yöntemleri, Zadeh ve Bellman tarafından ortaya atılmıĢtır.
Zadeh 1973‟te, „‟Kompleks Sistemlerin ve Karar Verme ĠĢlemlerinin Analizine Yeni Bir YaklaĢım‟‟ adıyla bulanık kontrolün temelini atan bir makale yayınlamıĢtır. Bu makalesinde dilsel değiĢkenleri ve insan bilgisini formüle etmek için EĞER-ĠSE kurallarını kullanmayı önermiĢtir. Bulanık mantıkla kontrol, ilk olarak 1975‟de Mamdani ve arkadaĢları tarafından bir buhar makinesinin bulanık kural tabanlı kontrolü ile baĢlamıĢtır. Bu uygulama sonucunda, doğrusal olmayan kontrol problemleri için bulanık kontrolcülerin klasik kontrolcülere göre çok daha kolay geliĢtirildiği ve oldukça iyi sonuçlar verdiği belirtilmiĢtir.
1978‟de ilk kez bir çimento fırınının kontrolü için bir bulanık kontrolcü geliĢtirilmiĢtir. 1980‟lerde bulanık mantık teorisi çok yavaĢ geliĢmiĢtir. Bu senelerde bulanık kontrolcüler, matematiksel model eksikliği nedeni ile geleneksel kontrol yöntemlerinin uygulanamadığı sistemlerde uygulanmaya baĢlanmıĢtır. 1980‟de Sugeno, Japonların ilk bulanık mantık uygulaması olan Fuji Electric su arıtma tesisinin kontrolünü gerçekleĢtirmiĢtir. 1983‟de, komutlarla kendi kendine park eden bir araba olan bulanık kontrollü bir robot çalıĢmasına baĢlanmıĢtır. Yine bu arada Hitachi‟den
Miyamoto, Sendani metrosu için bulanık kontrol sistemi geliĢtirmeye baĢlamıĢtır. 1987‟de bu proje bitirilmiĢ ve baĢarılı bir uygulama gerçekleĢtirilmiĢtir. Sendani metrosunun devreye alınmasından sonra, Temmuz 1987‟de Tokyo‟da ikinci uluslar arası bulanık sistemler konferansı yapılmıĢtır. Bu konferansta katılımcılara Sendani metrosu ve ayrıca iki boyutlu masa tenisi oynayabilen bir bulanık robot kolu da tanıtılmıĢtır (Wang, 1997).
9.2. Bulanık Mantık Kontrolün Tanımı
Bulanık mantık Prof. Lotfi A. Zadeh (1965) tarafından, belli oranda hassaslığa (imprecision), belirsizliğe (vagueness) ve kesinsizliğe (uncertainity) tahammül eden bir mantık ortaya çıkarıldı. Bu yöntemle, gerçek hayatta karĢılaĢılan birçok sistem bulanık kümeler yardımıyla daha iyi ifade edilebilir hale gelmiĢtir. Bulanık mantık, Aristo mantığında var - yok (0-1) biçiminde yer alan keskin sınırları ortadan kaldırarak bir olayın bir kümeye ait olma durumunu üyelik dereceleri ile belirlemektedir. Böylece doğanın kendisinde var olan belirsizliği, bilimsel düĢünce yapısına ve bu yapının ortaya çıkardığı ürünlere yansıtmak mümkün olabilmektedir. Bulanık mantığın kullanıldığı sistemlerde, saptanamayan veya ölçülemeyen parametrelerin etkisini ihmal etmek yerine insan bilgisi, sezgisi ve tecrübesi gibi kavramlardan yola çıkarak bu belirsiz parametrelerin de etkisini ortaya koymak mümkün olabilmektedir. Böylece Aristo mantığında yer almayan kiĢisel görüĢler, bulanık mantıkta kullanılarak klasik mantığın 0 ve 1 olan doğruluk değerleri daha esnek hale getirilmiĢtir. Bulanık mantık, bir süreci formüle etmek yerine sürecin oluĢumuna neden olan parametreleri tespit eder. Bundan dolayı, bu parametrelerin tüm süreç içerisindeki ağırlıklarını belirleme yoluna gider (Faris, 2008).
Kontrol iĢlemi için uygulama yapılırken her Ģeyden önce sistemin matematiksel modeline ihtiyaç duyulur. Ancak pratikte bu modelleme her zaman mümkün olmayabilir. Bazı durumlarda doğru model kurulsa bile bunun uygulamada kullanılması karmaĢık problemlere yol açabilir. Bu gibi sorunlarla karĢılaĢıldığı zaman genellikle kontrol olayını gerçekleĢtiren uzman kiĢinin bilgi ve deneyimlerinden yararlanma yoluna gidilir. Uzman kiĢi özel değiĢkenler olarak tanımlanan; uygun, çok uygun değil, yüksek, biraz yüksek, fazla, çok fazla gibi günlük yaĢantımızda sıkça kullandığımız kelimeler doğrultusunda esnek bir kontrol mekanizması geliĢtirir. ĠĢte bulanık küme teorisinin ve bulanık mantığın uygulaması olan bulanık mantık kontrol bu tür mantıksal