ÖZET Yüksek Lisans Tezi
RADYO FREKANS (RF) YÖNTEM LE ARAÇ TANIMA VE KONTROL S STEMLER N N TASARIMI VE GEL T R LMES
H. Bekir GÖKGÜNDÜZ Selçuk Üniversitesi Fen Bilimleri Enstitüsü
Elektronik ve Bilgisayar Sistemleri E itimi Anabilim Dalı Danı man: Yrd. Doç. Dr. Cemil SUNGUR
2008
Jüri : Prof. Dr. Novruz ALLAHVERD Yrd. Doç. Dr. Cemil SUNGUR
Yrd. Doç. Dr. Mehmet ÇUNKA
Bu çalı mada GPS sisteminin bir fonksiyonu olan istenilen herhangi bir araç yada nesnenin konumunun ve yerini belirleme i levinin yerine kullanılabilecek çok daha ekonomik kullanı lı ve i levsel, RF sinyaller kullanılarak araç tanıma, takip ve konum belirleme sistemi gerçekle tirilmi tir.
Elde edilen sonuçlar gerçekle tirilen sistemin araç yer ve konum belirlenmesinde GPS sisteminin yerine kullanılabilece ini gösterilmi tir.
ABSTRACT MS Thesis
DESINING AND DEVELOPING OF THE VECHILE RECOGNITION-CONTROL SYSTEMS BY USING RF METHOD
H. Bekir GÖKGÜNDÜZ Selçuk University
Graduate School Of Natural And Applied Sciences Department Of Electronic and Computer Systems Education
Supervisor :Assist. Prof. Dr. Cemil SUNGUR 2008
Jury : Prof. Dr. Novruz ALLAHVERD Assist. Prof. Dr. Cemil SUNGUR
Assist. Prof. Dr. Mehmet ÇUNKA
In this study, defination of a vehicle, tracking and position determination by the use of RF signals is made. The system formed by RF signals is more economic, useful and functional and it can be used instead of any vehicle’s and object’s position and place determination function, related with GPS system.
The results of the study shows that the system can be used instead of GPS system for determination of the place and position of a vehicle.
ÖNSÖZ
Çalı malarımda de erli fikirleriyle bana yol göstererek hiçbir yardımını esirgemeyen danı manım Yrd. Doç. Dr. Cemil SUNGUR’a, ekipman konusunda her türlü deste i sa layan Emre ÖZCEYHAN’a, yardımlarını esirgemeyen Ö r. Gör. Hakan TERZ O LU’na, Ö r. Gör. M. Ali ANADOL’a Ö r. Gör Özlem NAN’a ve aileme te ekkür ederim.
Ç NDEK LER
ÖZET i
ABSTRACT ii
ÖNSÖZ iii
Ç NDEK LER iv
EK LLER N L STES vii
TABLOLARIN L STES ix
S MGELER VE KISALTMALAR x
1. G R 1
2. YER VE KONUM BEL RLEME S STEMLER 5
2.1. GPS Sistemi 5
2.1.1. GPS sistemin yapısı 8
2.1.2. GPS’ in çalı ma prensibi 9
2.1.3. Uyduların konumunun önemi 10
2.1.4. Zamanlamanın önemi 10
2.1.5. Geometrik hesap 11
2.1.6. GPS alıcı teknolojisi 12
2.2. GLONASS 13
2.3. GAL LEO 13
3. LET M TEKN KLER 15
3.1. Kablosuz leti im Teknikleri 15
3.1.1. RF verici 18
3.1.2. RF alıcı 19
3.2. ASK (Amplitude Shift Keying – Genlik Kaydırmalı Anahtarlama)
Modülasyonu. 20
3.3. Antenler 22
3.4. Veri leti im Yöntemleri 23
3.4.1. Paralel ileti im 24
3.4.2. Seri ileti im 24
3.4.3. RS 232 seri protokolü 27
3.4.4. Seri port konfigürasyonu 28
3.5. Mikrodenetleyici ve Özellikleri 31
3.5.1. PIC16F877’nin mimari yapısı 33
4. JAL (JUST ANOTHER LANGUAGE) PROGRAMLAMA D L 39
4.1. Jal le Programlama 39 4.1.1. Register tanımlama 39 4.1.2. Port tanımlama 40 4.1.3. De er tipleri 41 4.1.4. Kullanılan operatörler 42 4.1.5. Döngü komutlar 43
4.1.6. Procedure ve function tanımlama 44
4.1.7. Asembler komutları kullanma 46
4.1.8. Aritmetik ve lojik i lem komutları 46
5. MATERYAL VE METOD 50
5.1. RF Alıcı ve Verici 51
5.1.1. ATX-34 RF verici devresi 51
5.1.2. ARX- 34 RF alıcı devresi 53
5.2. Araç Belirleme Sistemi 55
5.2.1. Sistemin çalı ma prensibi 57
5.2.1.1. Verici devre 58
5.2.1.2. Alıcı devre 61
6. DENEYSEL ÇALI MALAR 65
6.1.Tanıma Mesafesinin Belirlenmesi 65
6.2.Aracın Tanınmasını Engelleyecek Hızın Belirlenmesi 66
6.3.Aracın Tanınma Sayısı 67
6.4.Aracın Tanınmasına Hava Ko ullarının Etkileri 71 6.5.Aracın Tanınmasına Fizyolojik Engellerin Etkileri 72
7.TARTI MA 75
8. SONUÇLAR VE ÖNER LER 78
9. KAYNAKLAR
EK LLER N L STES
ekil Sayfa
ekil 2.1. GPS Stallite (GPS Uydusu) 6
ekil 2.2. Uyduların durumu 7
ekil 2.3. Global yer belirleme sisteminin i leyi yapısı 7
ekil 2.4. NAVSTAR sisteminin yapısı 8
ekil 2.5. ki uydu ile konum belirleme 11
ekil 2.6. Üç uydu ile konum belirleme 12
ekil 2.7. GLONASS stallite (GLONASS uydusu) 13
ekil 3.1. Dalga boyu 16
ekil 3.2. Elektromanyetik spektrum 16
ekil 3.3. Elektromanyetik dalganın yapısı 18
ekil 3.4. AM vericinin basit blok diyagramı 18
ekil 3.5. AM alıcının basit blok diyagramı 20
ekil 3.6. ASK i aret olu turulması 21
ekil 3.7. ASK modülasyon metodları 21
ekil 3.8. Orjinal TTL i areti, band sınırlı i aret ve ASK 21
ekil 3.9. ASK demodülasyon metodları 22
ekil 3.10. Kablolu ve kablosuz veri iletim yöntemi 24
ekil 3.11. 9 Ayaklı seri port ba lantı spesifikasyonları 26
ekil 3.12. RS232 seri protokolünün sinyal seviyesi 28
ekil 3.13. Art arda gelen 8 bitlik iki adet seri veri bilgisi 29
ekil 3.14. MAX232 ayak yapısı ve iç yapısı 30
ekil 3.15. MAX232 test devresi 31
ekil 3.16. PIC 16f877 basitle tirilmi iç yapısı 34
ekil 3.17. Harward mimarisi 35
ekil 3.19. 18F877 bacak yapısı 38
ekil 5.1. Sistemin kullanım ekli 51
ekil 5.2. ATX34 pin ba lantısı 52
ekil 5.3. ARX34 devresi 54
ekil 5.4. Araç takip sistemi devresi 56
ekil 5.5. Devre blok eması 56
ekil 5.6. Devre üzerinde bulunan elemanlar ve portlar 57
ekil 5.7. Alıcı ve verici devre blok emaları 58
ekil 5.8. Veri paketi 59
ekil 5.9. Prable verisi 59
ekil 5.10. Verici devrede lojik 1 ve lojik 0’ın yapısı 60
ekil 5.11. Verici devre programı akı diyagramı 60
ekil 5.12. Alıcı devre programı akı diyagramı 61
ekil 5.13. Araç takip sistemi için hazırlanan ara yüz programı 62 ekil 5.14. Araç takip sistemi için veri aktarım protokolünün belirlenmesi 63
ekil 5.15. Araç takip sisteminin çalı ması 64
ekil 5.16. Araç takip sistemine yeni bir plakanın eklenmesi 64 ekil 6.1. Vericinin alıcı tarafından tesbit edilme mesafeleri 66 ekil 6.2. 20, 50, 80, 100 ve 120 Km/h, lik hızlarda vericinin tanınma mesafesi 66 ekil 6.3. Aracın hızına ba lı olarak alıcının vericiyi aktif bölgede tanıma sayısı 68
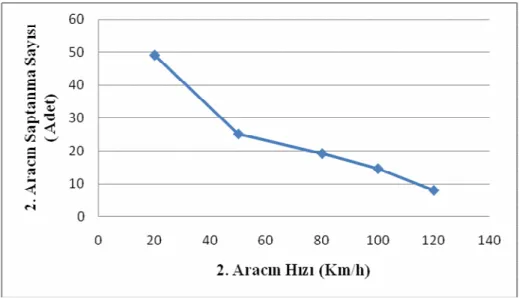
ekil 6.4. Hız - Saptama Sayısı Grafi i 69
ekil 6.5. Birden fazla aracın alıcının tanıma mesafesine aynı anda girmesi
durumunda araçların tanınması 69
ekil 6.6. 1. Aracın Hız - Saptanma Sayısı Grafi i 71
ekil 6.7. 2. Aracın Hız - Saptanma Sayısı Grafi i 71
ekil 6.8. 1. Aracın Hız - Saptanma Sayısı Grafi i 73
ekil 6.9. 2. Aracın Hız - Saptanma Sayısı Grafi i 73
TABLOLARIN L STES
Tablo Sayfa
Tablo 3.1. Standart seri I/O port adresleri ve kesmeleri 28 Tablo 3.2. MAX232 verici/alıcı pin lojik fonksiyonları 30 Tablo 4.1. Programla yaparken kullanılacak operatörler 42
Tablo 4.2. Lojik i lemler 46
Tablo 4.3. Aritmetik i lemler 48
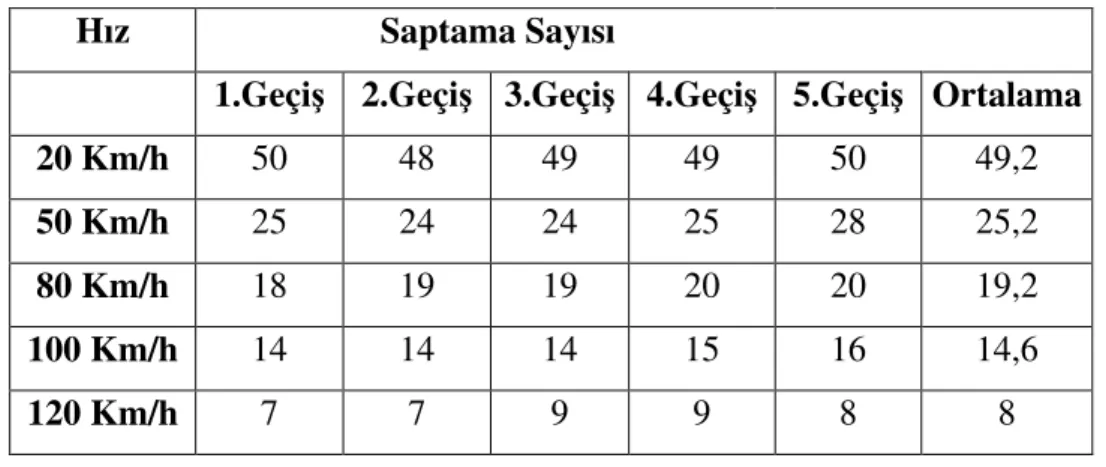
Tablo 6.1. Aracın hızına ba lı olarak saptama sayısı 68
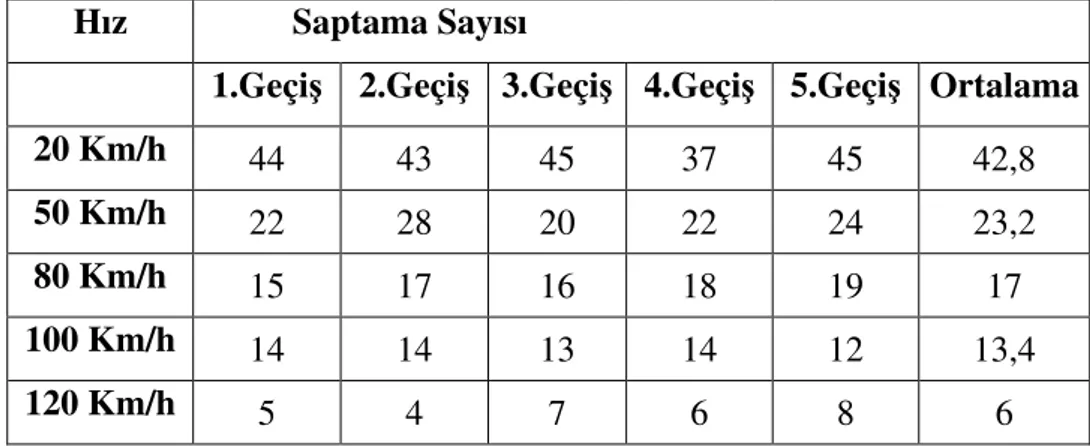
Tablo 6.2. Birinci Araç çin Saptama Sayısı 70
Tablo 6.3. kinci Araç çin Saptama Sayısı 70
Tablo 6.4. Sisli ve Ya murlu Havada Saptama Sayısı 72
Tablo 6.5. ehirler Arası Yollarda 1. Aracın Saptanma Sayısı 72 Tablo 6.6. ehirler Arası Yollarda 2. Aracın Saptanma Sayısı 73 Tablo 6.7. A ır Vasıta Araçların Arkasındaki Aracın Saptanma Sayısı 74
S MGELER VE KISALTMALAR Simgeler Açıklama mV miliVolt m metre s saniye KHz KiloHertz Kısaltmalar Açıklama
GPS Global Positioning System
NavStar GPS NavStar Global Positioning System
GLONASS Global'naya Navigatsionnaya Sputnikovaya
Sistema
GALILEO Avrupa yer bulum sistemi (Uzay blimcisinin
ismi)
ALU Aritmetik Logic Unit
UHF Ultra High Frekans
ASK Amplitude Shift Keying
JAL Just Another Language
DTR Data Terminal Ready
ADSL Asimetric Digital Subscriber Line
ISA Industry Standard Architecture
EIA Electronic Industries Association
TTL Transistor Transistor Logic
RAM Random Access Memory
ROM Read Only Memory
ALU Aritmetik Logic Unit
USART Universal Synchronous Asynchronous Receiver
Transmitter
EEPROM Electrically Erasable Programmable Read-Only
Memory
PWM Pulse Width Modulation
SPI Serial Peripheral Interface
1.G R
Günümüzde sosyal ya amın vazgeçilmez bir unsuru haline gelen ta ıtlar ve bu ta ıtların bilgilerinin saklanması ve sürekli olarak takip edilebilmesi amacıyla çe itli kontrol ve takip sistemleri geli tirilmi tir. Geli tirilen bu sistemler; Amerika Birle ik Devletleri NavStar GPS (NavStar Global Positioning System), Rusya da GLONASS (Global'naya Navigatsionnaya Sputnikovaya Sistema) ve Avrupa'nın küresel yer bulum sistemi de GAL LEO sistemleridir (Tohum 1996). Bunlardan en çok kullanılan sistem GPS sistemidir.
Global Positioning System olarak açılımı olan GPS, uydu bazlı radyo navigasyon sistemine verilen isimdir. Navigasyon (Yöngüdüm), bir aracı veya insanı bir yerden ba ka bir yere ula tırma olarak tanımlanmaktadır. GPS düzenli olarak kodlanmı bilgi yollayan bir uydu a ıdır ve uydularla aramızdaki mesafeyi ölçerek dünya üzerindeki kesin yerimizi 365 gün 24 saat tespit etmeyi mümkün kılabilmektedir. Her türlü hava ko ulları, tipi, yo un sis, hatta okyanusun ortasında referans noktanız olmadı ı durumlarda bile hizmet verebilirler. Uydu sinyallerini engelleyebilecek nesnelerin, yo un a açların gökyüzünü kapladı ı ya da binaların sık oldu u yerlerde GPS alıcılarının performansı dü ebilir (Corporation 2000).
Ülkemizde kullanmı oldu umuz GPS sisteminde kullanıcının yerini ba kasının belirlemesi sadece sistem sahibi tarafından gerçekle tirilebilir. Bizim kullanımımız alıcı cihazı kullanımı ile sadece kendi yerimizi belirlemekle sınırlıdır. Bu kullanım’da seçici kullanılabilirlik olarak tanımlanan sistem sahibibnin izin verdi i orandadır (Tohum 1996).
GPS sisteminin kullanımının çok pahalı, sınırlı bir kullanıma sahip olması ve stratejik önem ta ıması sebebiyle bu sistemin bizim kullanımımız açısından sınırlılıklarını ortadan kaldıracak alternatif sistemlerin olu turulması gerekmektedir.
Yapılan tez çalı ması bu soruna hem ucuz hem de var olan teknolojimizi kullanarak etkin bir çözüm üretmeyi amaçlamaktadır. Sistemin uydulara ihtiyaç duymadan günlük hayatta birçok amaç için kullanılan RF dalgalarını ve ileti im tekniklerini kullanarak hareket halindeki araçların yerinin belirlemesinin sa laması hedeflenmektedir.
L TERATÜR ARA TIRMASI
Bu ara tırmada RF kullanılarak yapılmı ya da araç kontrol ve konum belirleme amaçlı alternatif çalı malar incelenerek sistemin kullanımının ve opsiyonelli inin artırılması hedeflenmektedir.
Aktu , Çelik (2004), GPS destekli araç izleme ve navigasyon sistemleri incelemi , bir navigasyon sisteminden olan beklentileri göstermek amacıyla örnek bir yazılım geli tirmi tir. Endüstri standardı formatlarındaki sayısal CBS altlıklar kullanılmı , araç konumlarının gerçek zamanlı ve sonradan gösterimi gerçekle tirilmi tir. Bir navigasyon ve araç izleme sisteminde olması gereken niteliklerin tesbiti, kar ıla ılan sorunlar ile bunlara ili kin çözümler ve GPS verilerinin CBS bilgi ortamına aktarılması ve navigasyon çözümlerinin sayısal iyile tirilmesi incelenmi tir. Araç takip ve navigasyon sistemlerinde kar ıla ılan asıl sorunun donanım sorunu oldu u de erlendirilmektedir.
yidir, Özkazanç (2004), GPS alıcılarının de i ik karı tırma teknikleri altındaki performansını belirlemek amacıyla, GPS sinyal yapısı incelenmi , GPS karı tırma teknikleri ve GPS alıcılarının yapısı ara tırmı tır. Matlab\ Sımulink ortamı kullanılarak tipik bir GPS alıcısı modellenmi tir. Karı tırıcı sinyalin band geni li i, GPS sinyalinin bant geni li ini kapsayacak ekilde seçilmesine, karı tırıcı sisnyalin darbe periyodu, GPS dinamiklerine göre seçilmesi gerekti i tesbit edilmi tir.
Zengin, Urhan (2005), kablo ile sıcaklık verisinin aktarılmasının zor ve yüksek maliyetli oldu u durumlarda kullanılabilecek, RF veri haberle mesi ile
kablosuz çalı an bir uzaktan sıcaklık ölçüm sistemi prototipi geli tirmi tir. Bu amaçla sıcaklık algılayıcıları, RF verici, RF alıcı birimleri ve mikrodenetleyicileri kullanılarak çok noktadan kablosuz sıcaklık ölçümü yapabilen bir sistem gerçekle tirilmi tir.
nan, Koyun (2005), RF&Internet destekli su kuyusu otomasyon sistemi; geni arazideki su kuyularının ve su depolarının RF (radyo frekans) yöntem kullanılarak otomatik ve uzaktan kontrolünün gerçekle tirildi i bir çalı madır. çme ve sulama suyunu temin etmek amacıyla olu turulan, su kuyuları ve su depoları otomasyonu dü ük maliyetler de yapılmı tır. PIC mikrodenetleyiciler ile olu turulan kontrol ve haberle me programları yazılmı tır.
Kahraman, Gökmen (2006), giri olarak verilen bir görüntüden ta ıt plakasının ayırt etmek ve plakanın yerini bulan bir sistem geli tirilmi tir. Metod olarak, Gabor süzgeçleri kullanılmı . Bu çalı mada literatürler’de plaka yerinin saptanması için sunulan karma ık yöntemlere gerek duyulmadan, sadece Gabor süzgeç ve basit morfolojik i lemler yardımıyla plaka yer saptama probleminin çözülebilecegi gösterilmi tir.
Söyler, Odaba ı (2006), raylı toplu ula ımda makinist bilgilendirme ve araç takip sistemleri; Raylı sistemlerde kısa zamanda hızlı, dakik ve emniyetli araç takip ve makinist bilgilendirme sistemi. Geli en teknoloji ile birlikte kablosuz ileti im olanakları kullanlarak kabine konulan bir monitör ile sürekli yapılabilir hale gelmi tir. Tam otomatik olmayan sinyalizasyon sistemlerinde veya sinyalizasyonsuz tramvay i letmelerinde makinist bilgilendirme, araç takip ve zaman çizelgesi sistemleri i letme kolaylı ı sa layaca ından, performansının artması ve gecikmeleri minimuma indirmek ve bu ekilde yolcu memnuniyetinin sa lanması gerçekle tirilmi tir.
Palancıo lu, Kurban (2007), video tabanlı ölçme yöntemi ve görsel konum belirleme. Video tabanlı ölçmeler vasıtası ile mekansal verilerin elde edilmesi ve kullanımı ile ilgili yapılmı olan çalı malar ve geli tirilen yöntemler hakkında bilgi
verilmi tir. Yapılan çalı malar video verilerinin co rafi bilgi ile birlikte kullanıldı ında çok büyük fayda sa ladı ını, konum belirlemede hataları en aza indirmeye yardımcı oldu unu, ayrıca 3B haritaların elde edilmesinde de kullanılan video verileri daha önceki yöntemlere göre çok daha ekonomik çözümler sunmaktadır.
Göksu ve ark. (2007), araçlarda kendi kendine yol bulma Sistemi; Daha önceden belirlenen harita üzerinde aracın belirlenen bir noktadan istenen herhangi bir noktaya engellere çarpmadan gidebilmesini sa lamaktır. RF ileti im çift yönlü yapılarak aracın her adımda çevresindeki engel bilgisini kullanıcıya göndermesi sa lanabilir. Aracın gezindi i harita bilgisi, haritaya hakim bir kamera yardımıyla belirli anlarda foto raflanıp, görüntü i leme teknikleri ile bu çalı mada ele alınan hücresel harita görünümü ve bilgisi elde edilebilir. Bu çalı mada, daha önce belirlenmi bir harita üzerinde belirlenen herhangi bir konumdan istenilen bir konuma en kısa yolu bularak gidebilen bir araç gerçekle tirilmi tir.
Uzel ve ark. (2007), yapay uydular yardımıyla konum belirleme ve navigasyon sistemlerinde, ABD'nin GPS'inden sonra Ruslar da GLONASS isimli benzer bir sistem geli tirmi lerdir. Her iki sistemin kendine özgü bazı özellikleri ve bu sistemlerin birlikte kullanılarak bazı ek avantajlar sa lanması amaçlanmı tır. Bu amaçlada Türkiye'de verilerin güvenilirli i ve kalitesi, CBS altyapısına ili kin kurumlan arasındaki dayanı ma ve koordinasyon, sa lıklı mekânsal veriler ve sa lıklı bir veri pazarı altyapısının olu turulması gereklili i ispatlanmı tır.
Yapılan ara tırmada uzun mesafe konum belirleme ve araç takip amaçlı yapılan çalı malarda daha çok GPS sisteminden, kısa mesafelerde bilgi alma ve göndermelerde RF den yararlanıldı ı, günlük hayatta çok de i ik amaçlar için kullanıldı ı görülmü tür.
2. YER VE KONUM BEL RLEME S STEMLER
Günümüzde teknolojik ve ekonomik olarak güçlü ülkeler gerek askeri gerekse güvenlik amacıyla çe itli yer ve konum belirleme sistemleri olu turmu lardır. Amerika Birle ik Devletleri NavStar GPS (NavStar Global Positioning System), Rusya da GLONASS (Global'naya Navigatsionnaya Sputnikovaya Sistema) ve Avrupa'nın küresel yer bulum sistemi de Galileo sistemlerini geli tirmi lerdir (Jeff 1993).
2.1. GPS Sistemi
1960 ba larında aralarında ABD Ordusu, NASA ve ABD Ula tırma Bakanlı ının da yer aldı ı ABD hükümet kurulu ları, konum belirleme amaçlı uydusistemleri geli tirmeyi gündeme getirdiler. Bu amaçlı yapılan ara tırmalar sonucunda kurulması dü ünülen sistemin temel ölçütleri u ekilde belirlenmi tir (Wellenhof, Lichtenegger, Collins 1992).
Sistemin belirlenen temel ölçütleri: • Küresel kapsama alanına sahip olması, • Sürekli ve her hava ko ulunda çalı abilmesi, • Dinamik platformlara uygunluk sa laması, • Yüksek do rulukta konum belirlemesi
Proje 1973-1979 döneminde Kuramsal Kanıtlama, 1979-1985 döneminde Geli tirme ve Sistem Test, 1985'ten günümüze üretim ve konu landırma olmak üzere üç evreye bölünmü ve 1995 sonbaharında 24 GPS uydusu ile tam olarak i levsel duruma geçmi tir (Tohum 1996). ekil 2.1’ de GPS Stallite (GPS Uydusu) 24 uydudan biri gösterilmi tir.
ekil 2.1. GPS Stallite (GPS Uydusu) (Peter 1994)
Global Positioning System (GPS; Global Yer Belirleme Sistemi) Düzenli olarak kodlanmı bilgi yollayan bir uydu a ıdır. Bu sistem, ABD savunma bölümüne ait yörüngede sürekli olarak dönen ve çok dü ük güçlü radyo sinyalleri yayan 24 uydudan olu ur. ekil 2.2’de Uyduların dünya etrafındaki yörüngelerdeki konumları görülmektedir. Yeryüzündeki GPS alıcısı, bu sinyalleri alıp uydularla aramızdaki mesafeyi ölçerek dünya üzerindeki kesin yerimizi tespit etmeyi mümkün kılabilmektedir. ekil 2.3’de Global yer belirleme sisteminin i leyi yapısı gösterilmi tir.
Sistemin kurulum de eri yakla ık olarak 12 milyar ABD dolarıdır (Parkinson, Spilker 1996). Devam eden bakım masrafları sistemin de erini daha da
artırmaktadır. Bu sistemin ba langıçtaki kurulum hedefi tamamen askeri amaçlara yönelikti. GPS alıcıları yön bulmakta, askeri çıkartmalarda, roket atı larında vb askeri amaçlarda, daha sonra düzenli artan talepler do rultusunda 1980’lerde GPS sistemi sivil kullanıma da açılmı tır (Tohum 1996).
ekil 2.2. Uyduların durumu (Tohum 1996)
ekil 2.3. Global yer belirleme sisteminin i leyi yapısı (Inoss- ema)
Askeri amaçlı kullanımı dü ünülerek gerçekle tirilen GPS sisteminin sivil amaçlı kullanımı askeri amaçlı kullanıma göre %90 gibi daha büyük boyutlara ula mı tır. Ücretsiz sivil kullanımın da 2007 yılına kadar garantilendi i belirtilmektedir (Parkinson, Spilker 1996).
2.1.1. GPS sistemin yapısı
NAVSTAR sistemi, uzay bölümü (uydular), kontrol bölümü (yer istasyonları) ve kullanıcı bölümünden (GPS alıcısı) olmak üzere üç ana kısımdan olu maktadır. Bu kısımların yer yüzü ve uzaydaki yerle im konumları ekil 2.4’de gösterilmi tir.
ekil 2.4. NAVSTAR sisteminin yapısı (Beygo, Kar ılayan 2006)
Uzay Bölümü: Uzay bölümü, 21 aktif uydu ve 3 yedek uydu olmak üzere en az 24 uydudan meydana gelmekte ve Navstar sistemin merkezini olu turmaktadır. Uydular, “Yüksek Yörünge” adı verilen ve dünya yüzeyinin 20000 km üzerindeki yörüngede bulunurlar. Uyduların bu kadar yüksekte olmaları onlara geni bir görme alanına sahip olmalarını sa lar ve dünya üzerindeki bir GPS alıcısının her zaman en az 4 adet uyduyu görebilece i ekilde konu landırılmı tır (Beygo, Kar ılayan 2006)
.
Uyduların her biri, iki de i ik frekansta ve dü ük güçlü radyo sinyalleri yayınlamaktadır (L1,L2). L1 frekansını sivil GPS alıcıları UHF bandında 1575,42 Mhz den, L2 frekansını ABD Savunma bölümü alıcıları 1227,60 Mhzden kullanmaktadırlar. Bu sinyal “Görü Hattında – Line of Sight” ilerler. Yani bulutlardan, camdan ve plastikten geçebilir ancak duvar ve da gibi katı cisimlerden geçemez (Beygo, Kar ılayan 2006)
.
Her uydu yerdeki alıcının sinyalleri tanımlamasını sa layan iki adet özel “pseudo-random” ( ifrelenmi kod) kodu yayınlar. Bunlar Korumalı (Protected – P code) kod ve Coarse/Acquisition (C/A code) kodudur. P kodu sinyalleri karı tırılarak sivil izinsiz kullanımı engellenir, bu olaya “Anti-Spoofing” adı verilir. P koduna verilen ba ka bir isimde “P (Y)” yada sadece “Y” kodudur.
Bu sinyallerin ana amacı yerdeki alıcının, sinyalin geli süresini ölçerek, uyduya olan mesafesini hesaplamayı mümkün kılmasıdır. Yerdeki alıcının uyduya olan mesafesi, sinyalin geli süresi ile hızının çarpımına e ittir. Sinyallerin kabul edilen hızı ı ık hızıdır. Gelen bu sinyal, uydunun yörünge bilgilerini, saat bilgisini, genel sistem durum bilgisini ve iyonosferik gecikme bilgisini içerir. Uydu sinyallerinin iletim süreleri çok güvenilir atom saatleri kullanılarak zamanlanır (Beygo, Kar ılayan 2006)
.
Kontrol Bölümü: Adından anla ılaca ı gibi kontrol bölümü, GPS uydularını sürekli izleyerek, do ru yörünge ve zaman bilgilerini sa lar. Dünya üzerinde 5 adet kontrol istasyonu bulunmaktadır. Bunlardan dördü insansız, biri insanlı ana kontrol merkezidir. nsansız kontrol merkezleri, topladıkları bilgileri ana merkeze yollarlar ve Ana merkezde bu bilgiler de erlendirilerek gerekli düzeltmeler uydulara bildirilir (Beygo, Kar ılayan 2006)
.
Kullanıcı Bölümü: Kullanıcı bölümü yer yüzeyindeki alıcıların tümüdür. Daha önce bahsedildi i gibi çe itli amaçlarla GPS kullanarak yerini belirlemek isteyen herhangi bir ki i, sistemin kullanıcı bölümüne dahil olur (Beygo, Kar ılayan 2006).
2.1.2. GPS’ in çalı ma prensibi
GPS’ in çalı ma prensibini belirleyen bazı temel ölçütler vardır. Bunlar uyduların konumu, zamanlama, geometrik yapı, almanakbilgisi ve GPS alıcı
teknolojisidir. Bu temel ölçütlerin belirlemi oldu u sınırlar dahilin’de GPS in çalı ma prensipleri belirlenmi olur (Beygo, Kar ılayan 2006)
.
2.1.3. Uyduların konumunun önemi
GPS alıcısı yerini belirlemek için, öncelikle uyduların kesin yerini bilmelidir ve onlara ne kadar uzaklıkta oldu unu bulmalıdır. GPS uyduların yerini ö renmek için u yolu izler.
Alıcı uydudan iki çe it bilgi alır. Bunlardan birisi, uyduların konumlarını bildiren “Almanacdata – almanakbilgisi” di eri “Ephemerisdata – geçici bilgi”dır. Almanak bilgisi sürekli olarak uydulardan yollanır ve GPS’ in hafızasında saklanır. Bu sayede GPS her uydunun yörüngesini bilir ve uydunun olması gereken konumunu hesaplar. Uydular konum de i tirdikçe almanakbilgisi yenilenir. Almanak ve Ephemeris bilgilerini alan GPS alıcısı, uyduların kesin konumlarını sürekli olarak belirler (Beygo, Kar ılayan 2006)
.
2.1.4. Zamanlamanın önemi
GPS alıcısının uyduların kesin konumlarını bilmesinin yanı sıra uydulara olan uzaklı ını da bilmesi gerekir. Bu sayede, dünya üzerindeki kendi yerini hesaplayabilir ve bunun içinde basit bir formül kullanılır. Uyduya olan uzaklık formül 2.1 ile hesaplanır.
S = t * v (2.1) Burada ; S : Uzaklık (yol) (m) t : Geli Süresi (s) v : Hız (m/s)
Uzaklı ı belirlemek için kullanılan formül 2.1de sinyal hızını zaten bilmekteyiz. Radyo dalgasının hızı atmosferdeki ufak etkiler sayılmazsa ı ık hızına e ittir (c = 300000 Km/h).
Bundan sonra formül 2.1in zaman kısmının hesaplanması gerekir. Çözüm uydulardan gelen kodlanmı sinyallerin içinde saklıdır. Gönderilen koda “Pseudo-Random Kod” adı verilir. Böyle adlandırılmasının sebebi, çok düzensiz bir sinyal olmasıdır. GPS alıcısı da aynı kodu üreterek, uydudan gelen kodla e le tirmeye çalı ır. Bu iki kodu kar ıla tırarak aradaki gecikmeyi tespit eder. Bu gecikme miktarı ile ı ık hızının çarpımı mesafeyi verir.
Yakla ık olarak bir uydudan sinyalin dünyaya ula ma süresi 0,06 saniyedir. Saniyenin binde birinde olu acak bir hata, mesafe ölçümünde 300 km lik bir kaymaya sebep olacaktır.
S = t * v = 0.001 sn x 300 000 km/sn = 300 km
2.1.5. Geometrik hesap
Uyduların yerlerini ve uydulara olan uzaklıları bildi imizi kabul edersek, örne in birinci uyduya olan uzaklık 20000 km; Bizim yerimiz, merkezi uydu olan ve 20000 km çapındaki kürenin yüzeyi üzerindeki her hangi bir nokta olabilir. kinci bir uyduya da 21000 km uzaklıkta olalım. Bu durumda, ikinci küre birinci küre ile kesi erek ara kesitte yer yüzeyinde bir çember olu ur. ekil 2.5de bu durum gösterilmi tir (Beygo, Kar ılayan 2006)
.
ekil 2.5. ki uydu ile konum belirleme
E er buna 22000 km uzaklıkta üçüncü bir uydu eklersek, üç kürenin ortak kesim noktası olan 2 nokta elde ederiz. ekil 2.6da üçüncü kürenin eklenmesiyle kesi im noktalarında olu an bu iki konum gösterilmi tir (Beygo, Kar ılayan 2006)
.
ekil 2.6. Üç uydu ile konum belirleme
ki olası pozisyon belirlenmesine ra men bu iki nokta arasında büyük koordinat farkları mevcuttur. Bu iki noktadan hangisinin gerçek pozisyon oldu unu bulmak için, GPS alıcısına yakla ık yükseklik verisinin girilmesi gerekir. Bu ekilde GPS geriye kalan iki-boyut içinde kesin pozisyonu belirleyebilir. Fakat üç-boyutta yer belirlenmesi için GPS dördüncü bir uydu daha kullanır. Dördüncü uyduda bizden
19000 km uzaklıkta olsun, bu dördüncü küreyi, önceki kürelerle kesi tirirsek, elimizde sadece bir ortak kesim noktası kalır. Bu da üç-boyutta kesin konumu belirtir (Beygo, Kar ılayan 2006).
2.1.6. GPS alıcı teknolojisi
Ço u modern GPS alıcıları paralel, çok kanallı çalı ma sistemine sahiptir. Daha önceleri yaygın olan tek kanallı GPS alıcı modelleri çe itli ortamlarda sürekli olarak uydu takip edemiyorlardı. Paralel alıcılar ise her biri bir uyduyu izlemek üzere, 5 ile 12 alıcı devresine sahiptirler. Bunların içinden en kuvvetli dört sinyal takip edilir. Paralel alıcılar uydulara hızla kilitlenebildikleri gibi, yüksek binalar, sık ormanlar gibi zor ortamlarda da efektif bir ekilde çalı ırlar (Beygo, Kar ılayan 2006)
.
2.2. GLONASS
Hemen hemen GPS ile e zamanlı olarak o zamanki adıyla SSCB'nin geli tirdi i benzer amaçlı di er bir sistem de GLONASS' tır. Mali imkansızlık’lar yüzünden GPS kadar sa lıklı i letilemese de halen kullanılan bir sistemdir. Aktif olarak çalı ması amaçlanan 24 adet uydudan ancak 9 adedi hizmet verebilmektedir.
ekil 2.7de GLONASS Stallite (GLONASS Uydusu) uydularından birisi gösterilmi tir (Beygo, Kar ılayan 2006)
.
ekil 2.7. GLONASS stallite (GLONASS uydusu)
2.3. GAL LEO
Henüz yapım a amasında olan, ancak 2008 yılında bitmesi amaçlanan ve 3 milyar €'ya mal olaca ı tahmin edilen Avrupa'nın küresel yer bulum sistemi de Galileo'dur (Eren, Uzel 1995). EGNOS, GNSS-1, GNSS-2 olmak üzere 3 a amada tamamlanması planlanmaktadır.
EGNOS' un kendi içinde, ilk a aması tamamlanan kısmında, 3 a amada ve 3 konuda hizmet vermesi planlanmaktadır. lk a aması yer bulum amaçlı olarak, GPS benzeri sinyaller göndermesi dü ünülmektedir. Avrupa’nın uydu üreticisi olan Inmarsat' tan kiralanan 2 uydu ile kullanıcılara iki ek uydu imkanı vererek, hava araçlarının yöngüdümü gibi kritik uygulamalar için en az 6 adet uydu görülebilirli ini garanti etmektir. (GPS 'te bu sayı 4'tür). Bütünlük (integrity) sa lama amaçlı ikinci a amasında GPS, GLONASS ve EGNOS uydularının yerdeki gözlem istasyonlarından hata tahminlerinin yapılarak, bir uyduda sorun ya andı ında, kullanıcılara 10sn içinde bilgilendirilecektir. Bu servis olmasaydı bu süre en az 15 dk olurdu, üçüncü ve son a amada da, GPS' in standart sa ladı ı hizmette elde edilebilir yer bulum hatasını 5-10 metre kadar iyile tirece i belirtilen, geni alan sinyal düzeltme hizmeti amaçlanmaktadır. Avrupa kıtasında yere göre
durgun eri im (geostationary ranging), bütünlük izlenmesi (integrity monitoring) ve geni alan farksal iyile tirme (wide area differential augmentation) sa lanacaktır. (Beygo, Kar ılayan 2006)
.
3. LET M TEKN KLER
nsanlık tarihinin geli imiyle birlikte, insanların ileti ime duydu u ihtiyaçta artmı tır. Bu ihtiyaçlar kar ılıklı sözlü ileti imin yeterli olmadı ı durumlarda ses ve görüntünün uzaklara ileti imi için kullanılan tekniklerin geli mesine neden olmu tur.
Ses ve görüntünün uzaklara iletimi insanın sahip oldu u göz, kulak gibi duyu organlarının yeterli olmadı ı mesafelerde artık elektrik bilgisinin iletimi yani telgraf ve telefonun icadıyla ayrı bir boyut kazanmı tır.
Telefonun icadıyla ayrı bir boyut ve hız kazanan ileti im teknolojisi tek noktadan - tek noktaya, tek noktadan - çok noktaya ve çok noktadan – çok noktaya, çok noktadan - tek noktaya ileti imi gündeme getirmi tir. Bu ihtiyaç telli hatların yetersiz kalmasına neden oldu undan, iletim ortamı olarak havanın kullanılmasına, aynı zamanda modülasyon olarak adlandırılan, bilginin yüksek hızlı (frekanslı) ta ıyıcı bir dalga üzerine bindirilerek istenilen noktaya gönderilmesini sa layan tekniklerin geli tirilmesini sa lamı tır.
3.1. Kablosuz leti im Teknikleri
nsanlık tarihinde her yeni teknolojinin geli imiyle beraber, ki ilerin ya ama ekillerini de i tiren boyutlarda ilerlemeler kaydedilmi tir. Kablosuz ileti im teknolojileri, geni perspektiften bakıldı ında, ki ilere sınırsız özgürlük tanıyacak, kurumların ise çok daha etkin çalı malarını sa layacaktır.
Kablosuz ileti im teknolojisi, en basit tanımıyla, noktadan noktaya veya bir a yapısı eklinde ba lantı sa layan, bir teknolojidir. Bu açıdan bakıldı ında, kablosuz ileti im teknolojisi, günümüzde yaygın olarak kullanılan kablolu veya fiberoptik ileti im yapılarıyla benzerlik göstermektedir. Kablosuz ileti im teknolojisini di erlerinden ayıran nokta ise; iletim ortamı olarak havayı
kullanmasıdır. Metal kablolar, elektrik akımını iletirken, kablosuz ve optik iletim sistemleri belli frekanstan elektromanyetik dalga iletmektedir.
Radyo dalgaları, TV dalgaları ve mikrodalgalar elektromanyetik dalgaların tipleridir. Onlar birbirlerinden sadece dalga boyları ile farklıdırlar. ekil 3.1de görüldü ü gibi; Dalga boyu, bir dalga tepesi ile sonraki dalga tepesi arasındaki mesafedir.
ekil 3.1. Dalga Boyu
Elektromanyetik spektrumda dalgalar binalar büyüklü ündeki çok uzun radyo dalgalarından bir atomun çekirde inin boyutundan daha kısa gama dalgalarına kadar de i ir. ekil 3.2de elektromanyetik spektrum dalga boyu cinsinden ifade edilmi tir.
ekil 3.2. Elektromanyetik spektrum
Elektromanyetik dalgalar sadece dalga boyları ile de il, frekans ve enerjileri ile de tarif edilirler. Bu açıklamaların her üçü matematik olarak bir di eriyle ili kilidir.
Bu demektir ki bir X-ı ınını enerjisiyle ya da bir mikrodalgayı dalga boyuyla ya da bir radyo dalgasını frekansıyla anlatmak daha uygundur.
Elektromanyetik spektrum, en uzun dalga boyundan en kısa dalga boyuna u grupları kapsar: • Radyo dalgaları, • Mikro dalgalar, • nfrared dalgalar, • Optik dalgalar, • Ultraviole dalgaları, • X-ı ını dalgaları ve • Gama dalgaları.
Ses dalgaları gibi ya amımızın içinde olup ta göremedi imiz bu dalgalar, elektromanyetik dalgalar diye adlandırılır.
Deniz dalgaları gibi, ses dalgaları da içinde seyahat edecekleri bir ortama ihtiyaç duyarlar. Ses hava içinde seyahat edebilir çünkü hava moleküllerden olu mu tur. Hava molekülleri birbirine çarparak sesi ta ırlar tıpkı domino ta larının birbirleri üzerine çarparak yıkılması gibi moleküllerden olu an herhangi bir ortamda örne in suda, ses seyahat edebilir. Fakat uzayda seyahat edemez çünkü ses dalgalarını iletecek moleküler ortam yoktur. Bu nedenle uzayda ses de yoktur. Elektromanyetik dalgalar ses dalgalarına benzemezler çünkü seyahat etmek için moleküllere ihtiyaçları yoktur. Bu elektromanyetik dalgaların hava içinde katı ortam içinde ve uzay bo lu u içinde seyahat edebilece i anlamına gelir. Bu durum, uzay yürüyü ü yapan astronotların haberle mek için niçin radyo dalgaları kullandıklarını açıklar. Radyo dalgaları elektromanyetik dalgaların bir tipidir.
Elektrik ve manyetizma durgun (statik) halde olabilir. Ancak hareket halindeki elektrik ve manyetik yükleri elektromanyetik dalgayı olu turur. Elektromanyetik dalga, bir elektrik alanı ile bir manyetik alanı e le ti i zaman olu ur. Bir elektromanyetik dalganın elektrik ve manyetik alanları birbirlerine ve dalganın hareket yönüne diktir. Elektromanyetik dalgaların nasıl olu tu unu ve hangi
hızlarla hareket ettiklerini inceleyen ilk bilim adamları James Clerk Maxwell ve Heinrich Hertz dir.
ekil 3.3de dikey dalga bir elektrik alanını ve yönünü, yatay dalga da bir manyetik alanını ve yönünü göstermektedir. Elektromanyetik dalga, eksen çizgisi üstünde tek bir yönde ı ık hızıyla hareket eder.
RF vericide birle tirilerek gönderilen bu dalgalar RF alıcıda ayrı tırılarak elektrik dalgasına ve manyetik dalgaya çevrilirler.
ekil 3.3. Elektromanyetik dalganın yapısı
3.1.1. RF verici
Bilgi sinyali ile yüksek frekanslı (RF) ta ıyıcı sinyalinin genlik, frekans veya fazını de i tirerek (modüle edip) güçlendirildikten sonra hava ya da bir iletken ortam ile bilginin gönderildi i elektronik cihazlara RF verici denir.
ekil 3.4. AM vericinin basit blok diyagramı
ekil 3,4de gösterilen blok diyagramda, RF osilatör katı modülasyon için gerekli olan yüksek frekanslı ta ıyıcı sinyallerini üretir. Bu osilatör devresinin frekans kararlılı ının iyi olabilmesi için kristal kontrollü bir osilatör olması tercih edilir. Tampon yükselteci; Osilatörü, güç yükseltecinden izole eder. Osilatör katında meydana gelebilecek herhangi bir istenmeyen durumu bir sonraki kata geçirmez. Mikrofon, ses i aretlerini elektrik’i i aretlere dönü türür. Mikrofon çıkı ındaki seviye çok dü ük oldu u için ses frekans yükselteç katında yükseltilir. Modülatör katı ise alçak frekanslı bilgi sinyallerinin seviyesini ve gücünü, ta ıyıcıyı modüle edebilecek seviyeye çıkartır. RF güç yükselteci, modülasyon i leminin gerçekle tirildi i kattır. Bu katın bir giri ine ta ıyıcı di er giri ine ise modülatör katından gelen bilgi sinyalleri gelir. RF güç yükseltecinde modülasyon gerçekle tirildi ine göre antenden AM sinyal, elektromanyetik dalgalar eklinde uzak mesafelere gönderilir.
RF güç yükseltecinde, modülasyon i leminin gerçekle tirildi i transistör lineer olmayan bölgede çalı ır. ekil 3.4deki diyagramda, modülasyon vericinin en son katında gerçekle tirildi i için "yüksek seviyeli modülasyon" elde edilir.
RF güç yükseltecinde, genlik modülasyonunun gerçekle tirildi i devreler;
Bilgi
1. Kollektör Modülasyonu 2. Base Modülasyonu 3. Emiter Modülasyonu
4. FET 'li Analog Çarpıcı Modülatörü dür.
Kollektör, base ve emiter modülasyon devrelerinde devre adını, modüle edici sinyalin uygulandı ı modülasyonun yapıldı ı yükselteç elemanının adlarından alır. 3.1.2. RF alıcı
RF vericiden gelen sinyallerin anten tarafından yakalanıp RF güç yükseltecinde yükseltildikten sonra lokalosilatör sinyali ile karı tırılıp mikser çıkı ında RF sinyalinin demodülatörde demodüle edilerek bilgi sinyalinin elde edildi i elektronik cihazlara RF alıcı denir.
ekil 3.5. AM alıcının basit blok diyagramı
ekil 3.5de gösterilen blok diyagramda, lokalosilatör demodülasyon için gerekli olan yüksek frekanslı sinyallerini üretir. RF yükselteç anten çıkı empadansı ile mikserin giri empedansını uygunla tırırken asıl görevi antenden almı oldu u modüleli RF sinyalini yükselterek mikser katına ula tırmaktır. Vericide oldu u gibi emiter, base ya da kolektör yükselteç olarak çalı tırılabilir. Lokal osilatördeki RF
Mikser RF Yükselte Lokal Osilatör De modülatör Ses Frekans Yükselteci Bilgi
frekanslı sinyal ile RF yükselteçden gelen sinyal mikser katında karı tırılarak çıkı ında modüleli alçak frekanslı sinyal elde edilir. Bu sinyal demodülatör katında ta ıyıcısından ayrı tırılarak yükseltilmek üzere ses frekans yükseltecine uygulanır.
stenilen seviyeye yükseltilen sinyal verici giri indeki bilgi giri inin bir kopyasıdır.
3.2. ASK (Amplitude Shift Keying – Genlik Kaydırmalı Anahtarlama) Modülasyonu
Bu Modülasyon tipinde, ta ıyıcı i aretin genli i iki veya daha fazla de er arasında anahtarlanır. kilik durumda genellikte var-yok anahtarlama kullanılır. ASK dalga biçimi sıfır için bo luk, 1 için RF dalgalardan olu ur. ekil 3.6da ASK i aret olu umu gösterilmi tir.
ekil 3.7. ASK modülasyon metodları
ekil 3.8. Orjinal TTL areti (En alttaki ), Band Sınırlı aret ( Ortadaki ) ve ASK ( Üstteki)
3.2.1. ASK demodülasyonu
ASK demodülasyonun da orijinal i aretin elde edilmesi için uyumlu süzgeç yapısından yararlanılır. ASK bir genlik modülasyonlu i aret oldu undan bir zarf detektörü veya product demodülatör ile demodülasyonu ele alınmı tır. Bu demodülasyon yapılarının blok diyagramları ekil 3.9.a ve ekil 3.9.b de verilmi tir.
ekil 3.9. ASK Demodülasyon Metodları
3.3. Antenler
Elektrik sinyallerini bir sistemden alıp, elektromanyetik dalgaya çevirip ortama veren ya da çevresindeki elektromanyetik dalgaların yakalanarak bir sistemi besleyen cihazlara anten adı verilir.
Verimli bilgi transferi ve alımı için gerekli en önemli iki nokta iyi bir anten ve do ru RF topraklama seçilmesidir. Anten olmadan verinin istenilen uzun mesafelere gönderilmesi mümkün de ildir.
Antenler görev bakımından genelde üç ayrı grup elemanlardan olu urlar. Bu üç ayrı grup eleman, "Sürücü Eleman" (Driven), "Yönlendirici Eleman" (Director) ve "Yansıtıcı Eleman" (Reflector) olarak adlandırılırlar.
Sürücü Elemanlar: Bu eleman, anten ba lantı kablosunun do rudan do ruya ba landı ı elemandır. Bu eleman verici antende "I ınlayıcı" (Radiator) olarak görev yapar. Alıcı antende ise gelen dalganın enerji verdi i ve elektronlarını salındırdı ı elemandır. Gerek alıcı antenlerde ve gerekse verici antenlerde bu elemanlar aynı frekansta ve aynı biçime sahiptirler.
Yönlendirici Elemanlar: Bu elemanlar antende yardımcı görev üstlenmektedirler. Bir antenin belli bir yöne RF sinyal yayınımını (ı ımasını) sa layan görevi üstlenirler. Bu görevini yerine getirebilmesi içinde sürücü elemanın önünde yer alır.
Yansıtıcı Elemanlar: Bu elemanlar da yönlendirici elemanlar gibi yardımcı görev üstlenmektedirler. Genellikle bir antenin bakmakta oldu u yöne do ru "Ayna" görevi yaparlar. Bu ayna görevini yerine getirebilmesi için de sürücü ve yönlendirici elemanların arkasında yer alırlar.
RF verici ya da alıcıda kullanılacak anten tipi ve anten boyutları modülasyon tipine ve çalı ma frekansına, göre hesaplanır. Frekans büyüdükçe dalga boyu dolayısıyla da anten boyu küçülmektedir.
3.4. Veri leti im Yöntemleri
Veri ileti imi temel olarak A noktasının B noktasına veriyi göndermesi i lemdir. Buna tek yollu veri ileti imi denilir. E er B noktasının gönderdi i veriyi de A noktası alırsa bu durumda i lemin adına iki yollu veri ileti imi denilir.
Veri ileti im’i 2 ekilde sa lanabilir. • Paralel ileti im ile veri iletimi • Seri ileti im ile veri iletimi
ekil 3.10da kablolu ve kablosuz ileti im teknolojisinde seri ve paralel veri iletimi gösterilmi tir. Kablosuz iletimde iletim ortamı olarak hava kullanılırken, kablolu iletimde metal kablolar elektrik akımını iletirken, kablosuz ve optik iletim sistemleri belli frekanstan elektro-manyetik dalga iletmektedir.
ekil 3.10. Kablolu ve kablosuz veri iletim yöntemi
3.4.1. Paralel ileti im
Paralel ileti im, verilerin 8, 16, 32 ya da 64 bitlik gruplar halinde tek bir kablodan ayrı ayrı hatlar üzerinden gönderilmesidir.
3.4.2. Seri ileti im
Seri terimi, bitler gönderilirken her bir bitin bir seri halinde sıralandı ı, tek bir kablodan gönderilen veriye kar ılık gelir. Seri ileti imdeki amaç harfleri ifade eden 8 veya 16 bitlik bir dizi veriyi di er bir çevre birimine ula tırmaktır. Seri ileti imde senkron (e zamanlı) ve asenkron (e zamansız) veri ileti imi adı verilen iki metot kullanılmaktadır. Ula ım Noktası Sunucu KURUM Uygulama Sunucu Kablolu Kablosuz LAN INTERNET Güvenlik Duvarı
E zamansız seri ara birim: Sistemden sisteme bir ileti im portu olarak tasarlanmı tır. E zamansız ifadesinin anlamı, herhangi bir senkronizasyon’un ya da zamanlama sinyalinin bulunmaması ve karakterlerin herhangi bir rastgele zaman aralı ında gönderilebilmesidir.
E zamanlı seri ara biri: Senkronizasyon ve zamanlama sinyalinin bulunması, karakterlerin sıralı bir zaman aralı ında gönderilebilmesidir.
Seri ileti imde hem senkron hem de asenkron ileti imde her bir karakter, standart bir ba langıç ve biti sinyaliyle çerçevelenir. Ba langıç biti olarak adlandırılan tek bir 0 biti, her bir karakterin önüne gelerek, sonraki sekiz bitin bir byte veri olu turaca ını alıcı sisteme bildirir. Karakterin sonuna bir ya da iki biti biti gelerek karakterin gönderildi ini bildirir. leti imin alıcı tarafında karakterler, geli zamanlamaları yerine, ba langıç ve biti sinyalleriyle tanınırlar. E zamansız arabirim karakter yönelimlidir (character oriented) ve her bir karakteri tanımlamak için fazladan yakla ık % 20 ba lık bilgisi bulunur. E zamansız ileti im yöntemi ADSL’lerde kullanılmakta olup, telefon sisteminde ise e zamanlı seri ileti im kullanılır, çünkü bu sistem tek kabloyla her iki yönde de ileti im sa lar.
Seri ileti imle veri gönderilmesi için seri portlar kullanılmaktadır. Seri portlar, ileti im portları ya da COM portları olarak da bilinirler. PC’ler için eklenti halinde ki seri portlar birçok üretici tarafından sunulmaktadır. Hemen tüm modern ana kartlarda, bir ya da iki seri port ekleyen ve ek bir ara birim kartı gerektirmeyen hazır bir süper I/O çip i bulunur. Kart tabanlı modemlerde de, modem devresinin bir parçası olarak bir seri port bulunur.
ekil 3.11’de birçok modern harici seri portlarla kullanılan standart 9 ayaklı ba lantı görülmektedir.
Seri portun pinlerinin görevleri;
DCD(Data Carrier Detect): DCD pini ba lantı yapılacak olan cihazın veri ileti imine hazır olup olmadı ını ya da bu cihazın ileti im için çalı ıp çalı madı ını anlamamıza yarar. Bu sinyal ileti im yapılacak cihaz tarafından gönderilir. E er buradan gelen voltaj OFF de erinde ise kar ı taraf hatta ve veri ileti imine hazır oldu unun göstergesidir. Bu sinyal veri ileti iminde her zaman gönderilen bir bilgi de ildir. Bu cihaz tarafından ya da programın özelli ine göre belirlenen zamanlarda gönderilir. Kısaca cihazın kar ıda olup olmadı ını 1. Numaralı Pin olan DCD'nin durumu ile ö renilir.
RXD (Receive Data),TXD (Transmitted Data): Bu pin üzerinden kar ı bilgisayardan veri alınır. RXD ve TXD pinleri karde pinlerdir. TXD pini ise kar ı cihaza verinin gönderilmesine yarar. Bu Pinlerin voltaj aralıkları gönderilecek karakterin ya da bilginin cinsine göre 1 ya da sıfır olur. Örne in gönderilen veri "A" ise bu karakterin binary (ikili sistem kodu) 01000001 olacaktır. RXD pininde veri aynı bu ekilde alınır.
DTR (Data Terminal Ready): Bu pin veri iletimine hazır olundu unu kar ı tarafa bildiren pindir. Off de eri veri ileti imine hazır oldu unu On de eri ise veri ileti imine hazır olunmadı ını belirtir.
GND (Logical Ground): Teknik olarak GND pinine ait olan sinyal bir sinyal ya da bir voltaj de ildir fakat di er pinlerde ki i letilecek sinyallerde bu pin (Yani Mantıksal Toprak) olmadan i letilemezler. Basit olarak GND pini hangi voltajın negatif hangi voltajın pozitif olaca ını belirlemede bir referans noktasıdır.
RTS (Request To Send): Seri port yapısında veriler bir an içerisinde bir kez gider. Yani bir anda sadece bir bit lik veri kümesi gönderilebilir. Bu pin ise gönderilecek olan verilerin daha oldu unu belirterek di er veriler için kar ı cihazın kendini hazırlaması gerekti ini bildiren sinyali yollar. Bu sinyal genelde off durumundadır.
CTS (Clear To Send): Bu pine sinyal kar ı cihazdan gelir. Off pozisyonu bizim cihazımızdan kar ı cihaza gönderilecek verinin devamının oldu unu belirtir. RTS ve CTS sinyalleri cihazların veri ileti iminin düzgün olmasını sa lar. Ço u cihazda RTS ve CTS sinyalleri otomatik olarak Off pozisyonundadır.
3.4.3. RS 232 seri protokolü
Seri portla ileti im sa lamak için RS232, RS235 çe itli protokollar bulunmaktadır. Yapmı oldu umuz bu çalı mada RS232 protokolü kullanılmı tır.
RS232’nin tanımı Elektronik Endüstrisi Birli i (Electronic Industries Association EIA) tarafından tanımlanmı elektriksel ileti im için seri ba lantı standartıdır. Seri ileti imin bir standardı vardır, RS232 standardı da kendi arasında 3 guruba ayrılır (RS232A, RS232B, RS232C). Bunların arasındaki fark her birinin çıkı ve giri voltajlarının (yani 1 ve 0 voltajlarının) farklı olmasıdır. Ancak
günümüzde en çok kullanılan RS232 cinsi RS232C'dir. ekil 3.12.de RS232 haberle me protokol sinyali görülmektedir (Michelena, Gutman 2002).
3.4.4. Seri port konfügürasyonu
Standart bir konfügürasyonda, COM1, IRQ4 ve COM2 de IRQ3’ü kullanır. Seri port tarafından her bir karakter alındı ında, bir Kesme ste i Hattı (Interrupt Request Line – IRQ) kullanarak bilgisayarın ilgisini çekmelidir. Sekiz bit ISA veri yollu sistemler, bu hatların sekiz tanesine ve 16 bit ISA veri yollu sistemler de 16 tanesine sahiptir. 8259 kesme denetleyici çipi genellikle bu ilgi isteklerini ele alır. Tablo 3.1de standart seri I/O port adresleri ve kesmeleri gösterilmi tir.
Tablo 3.1. Standart seri I/O port adresleri ve kesmeleri
COM x I/O Portları IRQ
COM1 3F8 – 3FFh IRQ4
COM2 2F8 – 2FFh IRQ3
COM3 3E8 – 3EFh IRQ41
COM4 2E8 – 2EFh IRQ31
Seri Haberle mede Terimler:
Baud Rate: Veri iletim hızıdır. 1 saniyede iletilen veri adedine denir. Standart olarak veri hızları 300, 600, 1200, 2400, 4800, 9600, 19200, … eklinde’dir.
Start Bit: Seri haberle mede veriler senkron ya da asenkron olarak iletilebilirler. Senkron iletimde belirli bir ba langıçtan sonra veriler sıralı olarak art arda gelirler. Uzun bir dosyanın iletiminde bu yol kullanılabilir. Asenkron iletimde ise bir veri gönderildikten sonra yeni bir veri belirli olmayan bir zamanda gelir. te bu yeni verinin ba langıcı stard biti ile bildirilir.
Stop Bit: Gönderilen verinin bitti ini ifade eden bittir. Bu biti alan alıcı yeni bir veri için stard bitini gözlemeye ba lar. Haberle menin tipine göre 1 ya da 2 bit uzunlu unda olabilir.
E lik Biti (Parity Bit): Bir çe it hata denetim bitidir. Start ve 8 bitlik bir veri iletildikten sonra stop biti gönderilmeden parity gönderilir. letilen 8 bitlik veride 1’lerin sayısı çift ise EVEN tek ise ODD biti gönderilir. Alıcı bu biti kontrol ederek alınan verinin do ru olup olmadı ını kontrol eder. 1 parity 1 bit uzunlu undadır.
ekil 3.13’de seri bilginin dizili i gösterilmektedir.
Uygulama projesinde PIC16F877 mikro denetleyicisinden bilgisayara veri göndermek için bilgisayarın seri portunu (RS232 portunu) kullanmaktadır. 16F877 mikro denetleyicisi lojik seviye olarak: Lojik 0 = 0 V, Lojik 1 = 5 V kullanmaktadır. RS232 portu verilerin gürültülerden daha az etkilenmeleri ve daha uza a veri gönderebilmeleri için bu lojik seviyeler yeterli olmamaktadır. RS232 lojik seviyelerin minimum de erleri: Lojik 0 = -9 V, Lojik 1 = 9 V olmak zorundadır. Normal de eri yakla ık ± 12 V tur.
RS232 portundan alınan verilerin hem gürültüden daha az etkilenmeleri hem de iletim mesafesinin artırılması için MAX 232 lojik 0 = 0 V, lojik 1 = 5 V seviyelerinin minumum ± 9 V seviyesine çıkarılması için kullanılır. MAX232 entegresi, EIA-232 protokolü ile TTL/CMOS uyumlu entegrelerin gerilim seviyelerinin uyumlu çalı abilmesi için üretilmi tir. MAX232 entegresi standart uygulama de eri yakla ık ± 12 V tur. MAX232 entegresinin pin numaraları ve pin isimleri ekil 3.14de görülmektedir. Entegrenin içerisinde dört tane gerilim dönü türücüsü vardır. Bunlardan ikisi transmitter (alıcı), di er ikisi de receiver (verici) olarak adlandırılmaktadır. Bu dönü türücüler, gerilim seviyesi dönü türmesinin yanında Tablo 3.14 ten de görülece i gibi inverter (tersleyici) görevi de yapmaktadırlar.
Tablo 3.2. MAX232 verici/alıcı pin lojik fonksiyonları.
MAX232’ nin Özellikleri
• Çalı ması için sadece +5 volt kaynak gereklidir. • Yüksek data oranı 120 kbps’dır
• Onboard voltaj çiftleyici/tersleyici bulunmaktadır. • Dü ük güç gereksinimine ihtiyaç duymaktadır.
• Dü ük güç kapatma fonksiyonu, üç durumlu TTL/CMOS alıcı çıkı ına, 5 V için ± 10 salınım çıkı ına sahiptirler.
• 300 kaynak empedansı, 3 k ile 7 k arası giri empedansı, çıkı akımı sınırlayıcısı bulunmaktadır.
• Maksimum 30 V/µs Slew Rate oranına sahiptir.
• ± 30 V giri gerilimine ve gürültü ba ı ıklı ını iyile tirmek için 0.5 V luk histerezise sahiptir (Axelson, 2000 ).
•
MAX232 entegresin’de belirlenen protokolün olu turulmasında kullanılan devre ekil 3.15 de gösterilmektedir.
3.5. Mikrodenetleyici ve Özellikleri
1. Bir bilgisayar içerisinde bulunması gereken temel bile enlerden RAM, I/O ünitesinin tek bir çip içerisinde üretilmi biçimine mikrodenetleyici (Microcontroller) denir. Bilgisayar teknolojisi gerektiren uygulamalarda kullanılmak üzere tasarlanmı olan mikrodenetleyiciler, mikroi lemcilere göre çok daha basit ve ucuzdur. Günümüz mikrodenetleyicileri otomobillerde, kameralarda, cep telefonlarında, fax – modem cihazlarında, fotokopi, radyo, TV, bazı oyuncaklar gibi sayılamayacak kadar pek çok alanda kullanılmaktadır ( ahin ve ark. 2006).
Mikrodenetleyiciler üretildikleri firmalara ba lı olarak çe itli kodlarla adlandırılmaktadır. Örne in Intel firmasının üretti i mikrodenetleyicileri MCS kodu ile Microchip Technology Inc. firması tarafından üretilen mikrodenetleyiciler ise PIC olarak adlandırılmı tır. PIC, çevresel üniteleri denetleyici arabirimi (Peripheral Interface Controller) kelimelerin ba harflerinden almı olan bir mikro denetleyicidir. PIC, mikroi lemcili bir sistemin içerisinde bulunması gereken temel bile enlerden RAM, ROM, ALU, kontrol ünitesi ve I/O ünitesini tek bir cip içerisinde bulunduran entegre devredir. PIC ailesi çok geni olup bu ailede çe itli özelliklere sahip mikrodenetleyiciler bulunmaktadır (Microchip 2001).
Bütün PIC mikrodenetleyiciler en az a a ıdaki özelliklere sahiptirler;
• RISC (Azaltılmı Komut Takımı) temelli ve sadece 35 makine dili komutu. • Sayısal giri – çıkı portları.
• Zamanlama devresi. • RAM veribelle i.
• EPROM veya Flash program belle i.
Buna ilaveten, bazı PIC mikrodenetleyiciler de a a ıdaki ek özellikleri görebiliriz (Microchip 2001 ).
• Analog – sayısal çevirici. • EEPROM bellek.
• Analog kar ıla tırıcı devresi. • Ek zamanlama devreleri. • PWM devresi.
• Dı ve iç kesme (interrupt) devreleri. • USART seri ileti im protokolü. • I2C ve SPI ba lantıları.
3.5.1. PIC16F877’nin mimari yapısı
Günümüzde mikroi lemci üreticilerinin üretti i birkaç mikrodenetleyicisi bulunmaktadır. Bu denetleyicilerin mimarileri arasında çok küçük farklar olmasına ra men a a ıya yukarı aynı i lemleri yapabilmektedirler. Her firma üretti i cipe bir isim ve özelliklerini birbirinden ayırmak içinde parça numarası vermektedir. Örne in Microchip firması ürettikleri mikrodenetleyicilere PIC adını, parça numarası olarakta 12C505, 16C84, 16F84, 16F452 gibi kodlamalar verirken Intel firması ise üretti i mikrodenetleyicilere MCS-51 ailesi adını vermektedir (Microchip 2001).
Proje uygulamasında Microchip firmasının üretti i PIC16F877 mikrodenetleyicisi kolay bulunabilmesi, EEPROM özellik ta ıması, hafızasının yüksek olması sebebiyle tercih edilmi tir.
Kullanmı oldu umuz PIC16F877 mikrodenetleyicisinin içyapısı ekil 3.15 de görülmektedir. Mimari yapı mikrodenetleyicilere ait port yapılarının,
belleklerinin ve çalı masına ait blok diyagramların gösterildi i üretici firma tarafından datasheetlerin içerisinde kullanıcıya sunulmaktadır. Mikrodenetleyicinin programının yazılması sırasında ekil 3.15 de gösterilen mimari yapı kullanılmı tır (Microchip 2001).
ekil 3.16. PIC 16F877 basitle tirilmi iç yapısı
PIC 16F877 mikrodenetleyicisinde kullanılan Harvard mimarisi ekil 3.16 da gösterilmi tir. Bu mimaride program belle i ve veri belle ine eri im farklı boylarda yapılır. Harvard mimarisinde aynı anda veri belle ine 8 bit geni li indeki bu yolla eri ilebilirken, program belle ine program yolu ya da adres yolu (program bus / adress bus) denilen 14 bit geni li indeki di er bir yolla eri ilebildi i ekil 3.16 da gösterilmi tir. Bunun için PIC 16F87X ve PIC 16F84 de komut kodları (opcode), 14 bittir. 14 bitlik program belle inin her bir adresi, bir komut koduna (Instruction Code
/Instruction Word) kar ılık gelir. Dolayısıyla her komuta bir çevrim süresinde (cycle) eri ilir ve komut kaydedicisine yüklenir. Komut kaydedicisi, CPU tarafından kullanılan bir kaydedicidir ve dallanma komutları dı ındaki bütün komutlar, aynı çevrim süresinde çalı tırılırlar. Bu sırada program sayacı, PC (Program Counter) bir artar. Dallanma ya da sapma komutları ise, iki ardı ık periyotda çalı tırılır ve program sayacı PC iki arttırılır.
ekil 3.17. Harvard mimarisi
Merkezi i lem biriminin (CPU-Control Proses Unit) en önemli alt birimlerinden biri, ALU (Aritmetik Logic Unit) olarak adlandırılan aritmetik mantık birimidir. ALU’nun görevi, kendisine yollanan veriler üzerinde, aritmetik ya da mantıksal i lemler yapmaktır. ALU’da verinin i lenmesi ekil 3.17 de verilmi tir. ekil 3.17 de görüldü ü gibi biri W (Working Register) ismi verilen kaydediciden olmak üzere, iki ana giri vardır. ALU kendisine gelen iki veriyi (i leçler), toplayıp çıkarılabilir. Çe itli mantık i lemleri yapabilir (and,or, xor gibi).
Mikrodenetleyicilerde i lem yapabilmek için kullanılmak zorunda olan W registeri “working register” en çok kullanılan kaydedicidir ve kısaca W olarak adlandırılır. W registeri, aritmetik ve mantık i lemlerinde, iki i levi bir arada yürütür. lemden önce, i lenenlerden birini barındırır, i lemden sonra ise i lem sonucunu saklarlar. 16F877 mikrodenetleyicilerde, komutun sonuna konan 1 veya 0 sayısıyla, sonucun W’de ya da ba ka bir kaydedicisinde tutulaca ı mikroi lemciye bildirilir. PIC 16F877 ve 16F876, 8 Kword büyüklü ünde belle e sahiptir. Program belle i yonganın içerisindedir. PIC 16F84’ün belle i ise 1Kword büyüklü ündedir. PIC
16F84 ve 16F87X serisi mikrodenetleyiciler, kendi kaydedicilerini ve veri belle ini, do rudan, dolaylı ve göreceli olarak adresleyebilirler (Microchip 2001).
ekil 3.18. ALU’da verinin i lenmesi
16F87X Mikrodenetleyici ailesi a a ıdaki temel özellikleri ta ırlar;
• CPU (Merkezi lem Birimi) azaltılmı komut seti ve RISC (Azaltılmı Komut Takımı) temeline dayanır.
• Her biri 14 bit uzunlukta 35 komut vardır.
• Dallanma komutları iki çevrim (cycle) sürede, di erleri ise bir çevrimlik sürede uygulanır.
• lem hızı 16F877’de DC20 MHz’dir. (16F877’de bir komut DC200 ns hızında çalı ır.)
• Veri yolu (databus) 8 bittir.
• 32 adet SFR (Special Function Register) olarak adlandırılan özel i lem kaydedicisi vardır ve bunlar statik RAM üzerindedir.
• 8 Kword’e kadar artan flash belle i 1 milyon kez programlanabilir.
• 368 Byte’a kadar artan veri belle i (RAM) ve 256 Byte’a kadar artan EEPROM veri belle i vardır.
• Pin çıkı ları PIC 16C73B/74B/76 ve 77 ile uyumludur. • 14 kaynaktan kesme yapabilir.
• Yı ın derinli i 8’dir.
• Do rudan, dolaylı ve göreceli adresleme yapabilir.
• Poweron Reset (Enerji verildi inde sistemi resetleme özelli i) bulunmaktadır. • Powerup Timer (Powerup zamanlayıcı), Osilatör Startup Timer (Osilatör ba latma zamanlayıcısı),Watchdog Timer (Özel tip zamanlayıcı), devre içi RC osilatör bulunmaktadır.
• Programla kod güvenli inin sa lanabilmesi, devre içi Debugger (Hata ayıklamakta kullanılabilecek modül), dü ük gerilimli programlama, flash ROM program belle i (EEPROM özellikli program belle i) özelliklerine sahiptirler.
• Enerji tasarrufu sa layan, uyku –Sleep Modu bulunmaktadır.
• Seçimli osilatör özellikleri, dü ük güçle, yüksek hızla eri ilebilen, CMOSFlash EEPROM teknoloji, tümüyle statik tasarım,2 pinle programlanabilme özelli ine sahiptirler.
• Yalnız 5V giri le, devre içi seri programlanabilme özelli i, i lemcinin program belle ine, okuma/yazma özelli i ile eri imi, 2.0 V – 5.0 V arasında de i en geni i letim aralı ı 25 mA’lik kaynak akımı, devre içi iki pin ile hata ayıklama, geni sıcaklık aralı ında çalı abilme, dü ük güçle çalı abilme özellikleri bulunmaktadır.
Çevresel özellikleri ise öyle sıralanabilir;
• 16F87X Mikrodenetleyici ailesinde 3 tane zamanlayıcı bulunmaktadır. TMR0: 8 bitlik ve 8 bit önbölücülü olan zamanlayıcıdır.
TMR1:Uyuma modundayken dı kristal zamanlayıcıdan kontrolü artırılabilen, önbölücülü, 16 bit zamanlayıcıdır.
TMR2: Hem önbölücü hem de son bölücü sabitinin bulundu u 8 bitlik zamanlayıcıdır.
• ki Capture / Compare / PWM modül’ü 10 bit çok kanallı A/D çevirici bulunmaktadır.
• Senkron seri port (SSP), SPI (Master mod) ve I 2 C (Master Slave) ile birlikte paralel Slave Port, 8 bit geni likte ve dı RD, WR, CS kontrolleri, USART/SCI, 9 bit adres yakalamalı, BOR Reset (Brown Out Reset) özelliklerine sahiptir.
16F87X mikrodenetleyici ailesine ait PIC16F877 mikrodenetleyicisinin bacak yapısı ekil 3.18’de görülmektedir (Microchip 2001).
4. JAL (JUST ANOTHER LANGUAGE) PROGRAMLAMA D L
JAL, Wouter Van Ooijen tarafından 16F84, 16C84, 16F877, Scenix SX18 ve SX28 gibi mikrokontroler leri programlamak için geli tirmi yüksek seviyeli bir programlama dilidir.
Bilinen bilgisayar komutları ile kolayca mikrokontroller programlanmasını sa layan bu programlama dili derleyicisini ve kütüphane dosyalarını internetten bedava temin edebilir. Ayrıca programlama yaparken assembler komutlarını da kullanabilir.
4.1. Jal ile Programlama
Alıcı ile PC arasında seri ileti imi kurmak, alınan bilgiyi ekranda görmek ve bilgi kayıdını yapmak için gerekli olan yazılımda JAL programı kullanılmı tır. JAL dilinde yazılım yapabilmek için gerekli olan komutların bilinmesi gerekmektedir.
4.1.1. Register tanımlama
Jal ile mikrokontroller içerisinde mevcut olan registerları bit veya byte eklinde istedi imiz isimle tanımlayabiliriz.
Örnek: var byte, alınan_data
Yukarıdaki komutta program kullanılmayan registerlardan birini alınan_data eklinde isimlendirir.
Yukarı da yazılan komut satırı ile bir a biti tanımlanmı ve ba langıç de eri olarak lojik 1 atanmı tır. Byte içinde aynı komut satırı kullanılabilir ve 0’dan 255’e kadar bir ba langıç de eri atanabilir.
var byte n = 1, m = 257
Aynı anda birden fazla bit veya byte tanımlanabilir.
const byte, sabit_sayi = 125
Bu komut satırı ile de program içinde kullanılacak sabit bit veya byte’lar tanımlanabilir.
4.1.2. Port tanımlama
Kullanılan porttaki pin sayısı kadar I/O (gir -çıkı ) tanımlanabilir. Örne in 16f84 için 13 tane I/O kullana biliriz. Aksi takdir de derleyici hata verir ve derleme i lemini durdurur.
Örnek :
pin_a0_direction = input....A portunun sıfırıncı pinini input (giri ) yapar. port_b_direction = all_output ...B portunun tamamını output (çıkı ) yapar.
Buraya kadar anlatılanlardan bir örnek yapacak olursak ;
Örnek: Port b’yi kullanarak bir yürüyen ı ık programı yazalım.
*** yürüyen ı ık programı ****
include 16f84_4 -- Programı hangi mikrodenetleyici için yazıyorsak onun için gerekli derleme ayarlarını içerir.
include jlib -- Kullandı ımız komutları içeren lib dosyalarını içerir.
var byte bekleme_suresi – Bekleme süresi isminde bir byte’lık register tanımlanır.
port_b_direction = all_output -- b portunun tamamını çıkı yapılır.
bekleme_suresi = 25 -- 1 ile 255 arası de er vererekten ı ı ın kayma zamanını ayarlayabiliriz -- Burada 25 alınmı tır, de i tirebilir.
port_b = 0b_0000_0001 -- Birinci ı ık yanıyor.
delay_10ms(bekleme_suresi) -- 250 msn bekliyor (10msn*25=250 msn) port_b = 0b_0000_0010 -- Birinci sönüyor, ikinci yanıyor.
delay_10ms(bekleme_suresi) – Bekleme yapılıyor.
port_b = 0b_0000_0100 -- kinci sönüyor, üçüncü yanıyor. delay_10ms(bekleme_suresi) port_b = 0b_0000_1000 delay_10ms(bekleme_suresi) port_b = 0b_0001_0000 delay_10ms(bekleme_suresi) port_b = 0b_0010_0000 delay_10ms( bekleme_suresi) port_b = 0b_0100_0000 delay_10ms(bekleme_suresi) port_b = 0b_1000_0000 delay_1ms(bekleme_suresi) 4.1.3. De er tipleri
Programlama esnasında kullanılan sayılar binary, hexedecimal, decimal veya ascıı eklinde de erler alabilirler.
Örnek :
Gidecek_data = 0b_0101_0101 –- binary Gidecek_data = 0x_55 –- hexedecimal
Gidecek_data = 85 -- now decimal Gidecek_data = “a” – ascıı
4.1.4. Kullanılan operatörler
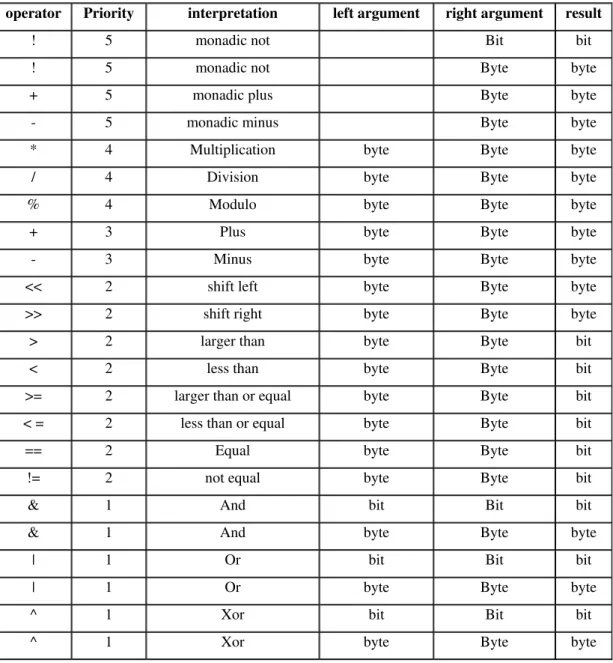
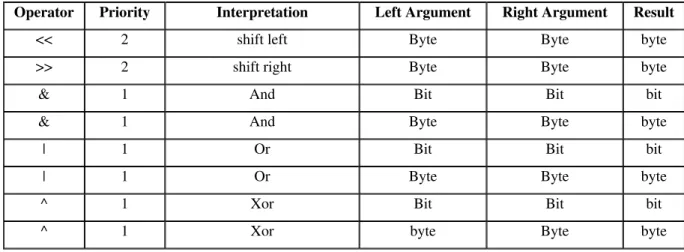
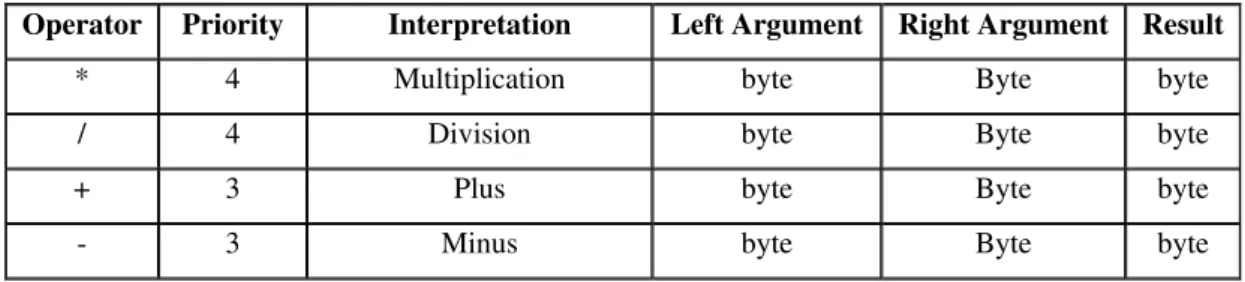
JAL dilinde programlama yapılırken kullanılacak operatörler Tablo 4.1 de verilmektedir.
Tablo 4.1. Programla yaparken kullanılacak operatörler
operator Priority interpretation left argument right argument result
! 5 monadic not Bit bit
! 5 monadic not Byte byte
+ 5 monadic plus Byte byte
- 5 monadic minus Byte byte
* 4 Multiplication byte Byte byte
/ 4 Division byte Byte byte
% 4 Modulo byte Byte byte
+ 3 Plus byte Byte byte
- 3 Minus byte Byte byte
<< 2 shift left byte Byte byte >> 2 shift right byte Byte byte
> 2 larger than byte Byte bit
< 2 less than byte Byte bit
>= 2 larger than or equal byte Byte bit < = 2 less than or equal byte Byte bit
== 2 Equal byte Byte bit
!= 2 not equal byte Byte bit
& 1 And bit Bit bit
& 1 And byte Byte byte
| 1 Or bit Bit bit
| 1 Or byte Byte byte
^ 1 Xor bit Bit bit
Örnek :
If gelen_data == 5 then pin_a0 = low end if sayici = sayici + 1
4.1.5. Döngü komutlar
Programlama dillerinin hepsinde kullanılan döngü komutları JAL dilinde de kullanılmaktadır. JAL dilinde döngü komutları ko ulsuz döngüler ve daimi döngüler (forever loop) olmak üzere ikiye ayrılırlar. Programlamada daimi döngü gerekli oldu u zaman kullanılır.
Örnek : Sürekli pin_a0’ı kontrol eden pin_a0’ın durumuna göre pin_a1’i lojik 1 veya 0 yapan mikrokontrollır programı :
include 16f84_4 include jlib
pin_a0_direction = input pin_a1_direction = output
pin_a1 = low --- pin a1’in ba langıç de eri forever loop
if pin_a0 == high then pin_a1 = high else pin_a1 = low end if end loop • Ko ullu döngü
Örnek :
while r > y loop d = d + 1 r = r - y end loop
For: Bir de ere kadar döngü yapmak istedi imizde kullanılır.
Örnek :
for 100 loop a = a + 1 end for
art Komutu (If)): Programlamada bazı arlar sa landı ında olması gereken olayları gerçekle tirmek için kullanılır.
Örnek : if a > b then x = a else x = b end if
4.1.6. Procedure ve function tanımlama
Programlamada yapılacak i lemleri yerine getiren alt programlardır ve programlarda kalıplar halinde kullanılırlar. Bu kalıp örnekte verilen kalıptır ve her procedure veya function bir isimle adlandırılmalıdır. Procedure veya function ça rılırken bu verilen isimler kullanılır.
Örnek :
Proceudre tanım örne i:
procedure zero( byte out x ) is begin x = 0
end procedure
Function tanım örne i :
function reverse( byte in x ) return byte is byte y for 8 loop asm rrf x, f asm rlf y, f end loop return y end function
Return Komutu: Alt programlardan geri ana programa dönmek için kullanılır.
Örnek :
function root( byte in x ) return byte is var byte n = 15
forever loop
if n * n <= x then return n end if n = n - 1
end loop end function
4.1.7. Asembler komutları kullanma