Keyframe reduction techniques for motion capture data
Tam metin
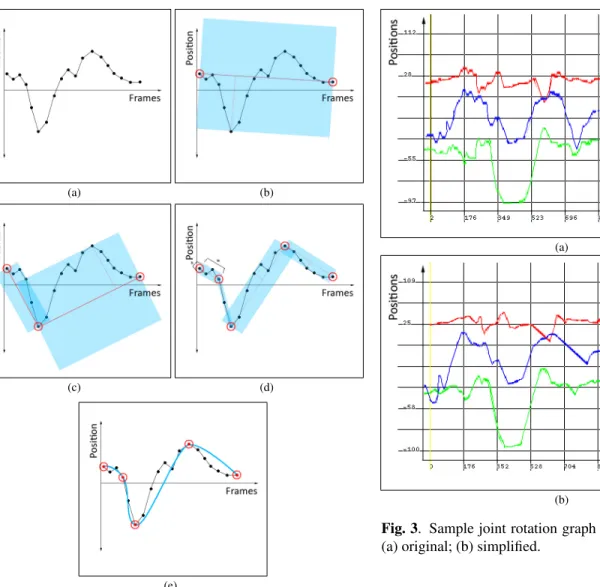
Şekil


Benzer Belgeler
“Destan” türünün tek tip bir edebiyat alanını imlemiyor olması, gezgin- ci destancılığın sözlü, yazılı/matbu ve elektronik sözlü kültür ortamları içindeki
2577 sayılı yasa ise bu kurala koşut olarak "Kararların Sonuçları" başlıklı 28/1 maddesinde "Danıştay, bölge idare mahkemeleri, idare ve vergi mahkemelerinin esasa
It is experimentally observed that the proposed cepstral feature extraction method provides better results in terms of the accuracy and processing time than the PCA in the MSTAR
• Abhinav Dhall, Monash University • Jyoti Joshi Dhall, Monash University • Sergio Escalera, University of Barcelona • Jeffrey Girard, Carnegie Mellon University • Laszlo
The experimental data collected shows that while I/O prefetching brings benefits, its effectiveness reduces significantly as the number of CPUs is increased; (ii) identify
Ayrıca çalışmanın uygulama kısmının üçüncü bölümünde adli muhasebenin alt dalları olan “dava destek danışmanlığı”, “hile denetçiliği” ve
Fredric Jameson, Postmodernizm, ikinci baskı, haz. Necmi Zeka, Kıyı Yay.. kronolojik bir dizgeye oturtularak Baudrillard’a gelene değin hangi bağlamlarda nasıl tartışıldığı
Patients (Expanded Disability Status Scale [EDSS] score ≤4.0; disease duration ≤10 years; discontinued prior DMT of ≥6 months’ duration due to suboptimal disease control)
