DÖNERKANAT TİPİNDE BİR İNSANSIZ HAVA ARACININ TASARIMI, MODELLENMESİ VE KONTROLÜ
MERT ÖNKOL
YÜKSEK LİSANS TEZİ
ELEKTRİK VE ELEKTRONİK MÜHENDİSLİĞİ
TOBB EKONOMİ VE TEKNOLOJİ ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
HAZİRAN 2010 ANKARA
Fen Bilimleri Enstitü onayı
_______________________________
Prof. Dr. Ünver KAYNAK Müdür
Bu tezin Yüksek Lisans derecesinin tüm gereksinimlerini sağladığını onaylarım.
_______________________________
Prof. Dr. Mehmet Önder EFE Anabilim Dalı Başkanı
Mert ÖNKOL tarafından hazırlanan DÖNERKANAT TİPİNDE BİR İNSANSIZ HAVA ARACININ TASARIMI, MODELLENMESİ VE KONTROLÜ adlı bu tezin Yüksek Lisans tezi olarak uygun olduğunu onaylarım.
_______________________________
Prof. Dr. Mehmet Önder EFE Tez Danışmanı
Tez Jüri Üyeleri
Başkan : Doç. Dr. Veysel GAZİ _______________________________
Üye : Prof. Dr. Mehmet Önder EFE _______________________________
TEZ BİLDİRİMİ
Tez içindeki bütün bilgilerin etik davranış ve akademik kurallar çerçevesinde elde edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu çalışmada orijinal olmayan her türlü kaynağa eksiksiz atıf yapıldığını bildiririm.
Üniversitesi : TOBB Ekonomi ve Teknoloji Üniversitesi
Enstitüsü : Fen Bilimleri Enstitüsü
Anabilim Dalı : Elektrik ve Elektronik Mühendisliği Tez Danışmanı : Prof. Dr. Mehmet Önder EFE Tez Türü ve Tarihi : Yüksek Lisans – Haziran 2010
Mert ÖNKOL
DÖNERKANAT TİPİNDE BİR İNSANSIZ HAVA ARACININ TASARIMI, MODELLENMESİ VE KONTROLÜ
ÖZET
Bu tez çalışması dönerkanat tipinde bir insansız hava aracının modellenmesini, tasarımını ve kontrolünü ele almaktadır. Dönerkanat dinamik modeli Newton-Euler yöntemi yardımıyla türetilmiş ve model katsayıları gerçek zamanlı sistem temel alınarak hesaplanmıştır. İnsansız hava aracı uygulamalarında önemli bir yere sahip olan eyleyici itki dinamikleri sınırlı güç koşulları altında ayrıntılı şekilde incelenmiştir. İtki modelleme işlemi fırçasız doğru akım motoru (FDAM) tarafından tüketilen güç nedeniyle meydana gelen batarya gerilim düşümünü ve modülasyonu bertaraf etmek, eyleyici ayırıcı özelliklerini dönerkanat dinamik sistemine yansıtmayı amaçlamaktadır. Geçici ve sürekli rejimde eyleyicilerin gösterdiği davranış, parametreleri Levenberg-Marquardt en iyileme yöntemi tarafından ayarlanan yapay sinir ağı (YSA) yardımıyla ifade edilmektedir. Dönerkanat üzerinde kontrol uygulamaları benzetim ve gerçek zamanlı olmak üzere iki farklı şekilde gerçekleştirilmektedir. Benzetim çalışmaları esnasında kontrol yöntemleriyle beraber türetilen dönerkanat dinamik modelinin ve YSA tabanlı eyleyici modelinin doğruluğu da gerçek zamanlı uygulamalar öncesi sınanmıştır. Sırasıyla oransal integral ve türevsel (PID) kontrol yöntemi, kayan kipli denetim (KKD) yöntemi, geriadımlamalı kontrol yöntemi ve geribesleme ile doğrusallaştırmayla kontrol yöntemleri irdelenmiş; gezinge takip performansı, kontrol sinyallerinin uygulanabilirliği ve geçici tepkilerinin uygunluğu açısından karşılaştırmalı değerlendirilmeleri yapılmıştır. Gerçek zamanlı uygulamalarda ise benzetim çalışmaları uygulanan PID ve KKD yöntemleri seçilmiş ve aracın kararlılığını koruyarak istenilen yörüngede kalması sağlanmaya çalışılmıştır. Gerçek zamanlı uygulamalarda ayrıca karşılaşılan donanımsal sorunların üstesinden nasıl gelindiği anlatılmıştır.
Anahtar Kelimeler: Dönerkanat, Newton-Euler, Levenberg-Marquardt, Yapay sinir ağı, PID, KKD, geribesleme ile doğrusallaştırma, geriadımlamalı kontrol.
University : TOBB University of Economics and Technology Institute : Graduate School of Engineering and Physical
: Sciences
Science Programme : Electrical and Electronics Engineering Supervisor : Professor Dr. Mehmet Önder EFE Degree Awarded and Date : M.Sc. – June 2010
Mert ÖNKOL
DESIGN, MODELING AND CONTROL OF QUADROTOR TYPE UNMANNED AERIAL VEHICLE
ABSTRACT
This thesis considers design, modeling and control of quadrotor type unmanned aerial vehicle. The derivation of the dynamic model of the vehicle is performed by aid of Newton-Euler formulation and coefficients of the model are calculated based on the real time model. The dynamic behavior of the actuator propulsion under limited power conditions, which is a very important issue in unmanned aerial vehicles (UAVs), is particularly investigated. The aim of the propulsion modeling is to eliminate the modulation and decrease in battery voltage due to consumption of power by brushless direct current (BLDC) motor and incorporate the characteristics of propulsion into quadrotor dynamics. Transient and steady state behavior of the propulsion is represented by artificial neural network based approach whose parameters are adjusted by Levenberg-Marquardt optimization technique. The control applications on quadrotor are achieved by two different forms, which are simulation and real time studies. The accuracy of control approaches with derived quadrotor dynamic model and neural network based propulsion model are justified via simulation studies before real time applications. Proportional integral and derivative (PID) control scheme, sliding mode control (SMC), backstepping technique and feedback linearization control are discussed, respectively, A comparison of the approaches is presented in terms of the tracking precision, applicability of control signals and the qualities of the transient response. In the real time studies, PID control and SMC techniques discussed in simulations are chosen to drive the vehicle dynamics to desired trajectories while sustaining stability. The solutions to problems which are encountered in real time studies are also discussed. Keywords: Quadrotor, Newton-Euler, Levenberg-Marquardt, Artificial neural network, PID, SMC, backstepping, feedback linearization.
TEŞEKKÜR
Çalışmalarım boyunca değerli yardım ve katkılarıyla beni yönlendiren hocam Prof. Dr. Mehmet Önder EFE’ye, yine kıymetli tecrübelerinden faydalandığım TOBB Ekonomi ve Teknoloji Üniversitesi Elektrik-Elektronik Mühendisliği Bölümü öğretim üyelerine;
Yardımlarını benden esirgemeyen İnsansız Hava Araçları Laboratuarında bulunan arkadaşlarım Nevrez İMAMOĞLU, Aydın ERESEN, Necdet Sinan ÖZBEK ve Yusuf BUĞDAY’a;
Beni her zaman destekleyen ve bugünlere getiren aileme teşekkürü borç bilirim.
Bu tez TÜBİTAK tarafından 107E137 referans numaralı "Dönerkanat Tipinde Bir İnsansız Hava Aracıyla Otonom Yörüge Takibi ve Görüntüleme" başlıklı proje tarafından desteklenmiştir. Eğitimim süresince projedeki desteklerinden dolayı TÜBİTAK'a teşekkürü borç bilirim.
İÇİNDEKİLER Sayfa ÖZET iv ABSTRACT v TEŞEKKÜR vi İÇİNDEKİLER vii ÇİZELGELERİN LİSTESİ ix ŞEKİLLERİN LİSTESİ x KISALTMALAR xv 1. GİRİŞ 1
1.1. DKİ Hava Araçlarının Gelişimi 2
1.2. DKİ Hava Araçları Üzerine Çalışmalar 8
1.2.1. Geleneksel Tek Ana/Kuyruk Rotorlu Düzenleşim 8
1.2.2. Tek Rotorlu Düzenleşim 9
1.2.3. Çift Rotorlu Eş-eksenli Düzenleşim 10
1.2.4. Yan-yana Sıralı Çift Rotorlu Düzenleşim 10
1.2.5. Çok Rotorlu Düzenleşim 11
1.3. Dönerkanat Kontrol Çalışmasının İçerdiği Konular 16
2. DÖNERKANAT SİSTEMİNİN DİNAMİK MODELİNİN TÜRETİMİ 20
2.1. Gövde Eksenlerinde Hareketin Tanımı 20
2.2. Dinamik Modelin Türetilmesi 21
2.2.1. Newton-Euler Yaklaşımı 21
2.2.2. Euler Denklemleri 23
2.2.3. Açısal Hızlar-Euler Açıları Dönüşümü 28
2.2.4. Dönerkanat Üzerine Etkiyen Kuvvetler ve Momentler 29
2.2.5. Atalet Momentlerinin Sayısal Hesabı 33
2.3. Eyleyici İtki Modelleme 42
2.3.1. Test Düzeneği 43
2.3.2. Veri Toplama ve Batarya Gerilimindeki Modülasyonu Engelleme 46
3. DÖNERKANAT BENZETİM ÇALIŞMALARI 65 3.1. Kontrol Uygulamaları için Dönerkanat Dinamik Sistem Modeli
Düzenlemesi 65
3.2. Dönerkanatın Alt Düzey Kontrolü 67
3.2.1. Sistem Dinamiklerindeki Bağlaşım ve Sıralı Bağlı Kontrol Yapısı 68
3.2.2. Kartezyen Pozisyon Kontrolü 70
3.2.3. Duruş Kontrolü 73
3.3. Benzetim Çalışmalarıyla İlgili Gözlemler 113
4. GERÇEK ZAMANLI KONTROL ÇALIŞMALARI 115
4.1. Gerçek Zamanlı Kontrol Uygulamaları Esnasında Kullanılan Araçlar 116
4.1.1. Ataletsel Ölçme Birimi (3DM-GX1) 116
4.1.2. Ses üstü Mesafe Algılayıcı (EZ1) 123
4.1.3. dSPACE DS1104 R&D Veri Kontrol Kartı 124
4.1.4. AXI 2212/34 Fırçasız Doğru Akım Motoru 129
4.1.5. JETI 30 A Elektronik Hız Kontrolörü 130
4.2. Gerçek Zamanlı Kontrol Uygulamaları 131
4.2.1. PID Kontrol Yöntemiyle Gerçek Zamanlı Kontrol Uygulaması 131 4.2.2. Kayan Kipli Denetim Yöntemiyle Gerçek Zamanlı Kontrol
Uygulaması 137
4.2.3. Kamera Geribeslemesiyle Kontrol Uygulaması 143
5. SONUÇLAR VE YORUMLAR 152
KAYNAKLAR 156 ÖZGEÇMİŞ 159
ÇİZELGELERİN LİSTESİ
Çizelge Sayfa
Çizelge 2.1. Dönerkanat sisteminin bileşenleri 39
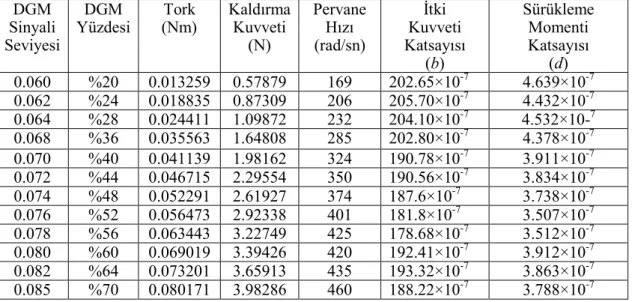
Çizelge 2.2. Deneysel çalışmalar neticesinde elde edilen ortalama b=192.32×10−7 ve d=4.003×10−7 katsayı değerleri 55
Çizelge 2.3. FDA motorunun modellenmesinde kullanılan YSA’ya ait parametre değeri 63
Çizelge 2.4. DGM sinyali tahmin edici yapıya ait parametre değerleri 64
Çizelge 3.1. Dönerkanat sistemi fiziksel parametreleri 67
Çizelge 3.2. Kartezyen pozisyon kontrolör katsayıları 73
Çizelge 3.3. Duruş kontrolörü katsayıları 74
Çizelge 3.4. PID ile duruş kontrolü için benzetim değişkenleri 74
Çizelge 3.5. KKD ile duruş kontrolü için benzetim parametreleri 85
Çizelge 3.6. Geriadımlamalı Kontrol ile duruş kontrolü için benzetim parametre değerleri 98
Çizelge 3.7. Geribesleme ile doğrusallaştırma ile duruş kontrolü için seçilen benzetim parametre değerleri 108
Çizelge 4.1. DS1104 donanımsal özellikleri 126 Çizelge 4.2. Gerçek zamanlı PID kontrolör katsayıları 137 Çizelge 4.3. KKD için gerçek zamanlı uygulama parametreleri 137 Çizelge 4.4. Kartezyen pozisyon kontrolü parametreleri 137 Çizelge 4.5. Gerçek zamanlı PID kontrolör katsayıları 148
ŞEKİLLERİN LİSTESİ
Şekil Sayfa
Şekil 1.1. MQ-1 Predator modeli İHA, [1] ... 2
Şekil 1.2. DKİ hava araçlarına ait ilk örneklerden biri (Çin sopası), [2] ... 3
Şekil 1.3. Leonardo Da Vinci’nin hava burgusu, [3] ... 4
Şekil 1.4. George Carey’in buharla çalışan converti uçağı, [2] ... 5
Şekil 1.5. Bothezat’ın tasarladığı dört rotorlu hava aracı, [5] ... 6
Şekil 1.6. Igor Sikorsky’nin ürettiği ilk helikopter, [4] ... 7
Şekil 1.7. Sikorsky S-55 helikopteri, [4] ... 7
Şekil 1.8. Geleneksel tek ana/kuyruk rotorlu düzenleşim, [6] ... 9
Şekil 1.9. Tek rotorlu düzenleşim, [1] ... 9
Şekil 1.10. Çift rotorlu eşeksenel düzenleşim, [7] ... 10
Şekil 1.11. V-22 Osprey, [8] ... 11
Şekil 1.12. Dönerkanat, [9] ... 12
Şekil 1.13. Boabdallah ve ekibinin ürettiği dönerkanat, [12] ... 14
Şekil 1.14. STARMAC projesinde kullanılan bir dönerkanat, [20] ... 16
Şekil 2.1. Dönerkanat hareket tasviri ... 20
Şekil 2.2. Koordinat Sistemi Tanımları ... 23
Şekil 2.3. Birinci (a), ikinci referans (b) eksen takımı (c) katı gövde gösterilmiştir. . 25
Şekil 2.4. Kontrol sinyallerinin dinamik modeli kontrol edecek uygun hale dönüşümü, [36] ... 43
Şekil 2.5. Batarya gerilimi ve ayrık zamanlı süzgecin çıkışı, [37] ... 47
Şekil 2.6. Uygulanan DGM sinyali, [37] ... 48
Şekil 2.7. Sabit DGM sinyali altında batarya tüketimi, [37] ... 48
Şekil 2.8. Sabit DGM sinyalinde açısal pervane hızı değişimi, [37]... 49
Şekil 2.9. DGM sinyalinin çalışma aralığı, [37] ... 49
Şekil 2.10. Açısal pervane hızı çalışma aralığı, [37] ... 50
Şekil 2.11. 50Hz DGM sinyalinin tasviri, [37] ... 51
Şekil 2.12. Açısal pervane hızı ile kaldırma kuvveti arasındaki bağıntı ... 51
Şekil 2.13. Fototransistor-KVD düzeneği, [37] ... 52
Şekil 2.14. Pervanenin dönmesi sonucu oluşan darbeler, [37] ... 53
Şekil 2.15. b ve d katsayılarının bulunması için kurulan deney düzeneği, [36] ... 54
Şekil 2.16. Deney düzeneği blok diyagramı, [36] ... 54
Şekil 2.17. Çok katmanlı YSA ... 57
Şekil 2.18. Bir nöronun yapısı ... 57
Şekil 2.19. Uygulanan DGM sinyali (sol) ve karşılık gelen kaldırma kuvveti (sağ) . 59 Şekil 2.20. Modellemede kullanılan YSA yapısı ... 60
Şekil 2.21. Eğitim ve doğrulama hatalarının davranışı, [37]... 62
Şekil 2.22. YSA’nın test verileriyle doğrulanması, [37] ... 62
Şekil 2.23. DGM sinyali tahmin edici yapı, [36] ... 63
Şekil 2.24. FDA motorunun modeli, [36] ... 63
Şekil 3.1. Açısal ve doğrusal altsistemlerin etkileşimi ... 69
Şekil 3.2. Kartezyen pozisyon ve duruş kontrol blokları ... 69
Şekil 3.3. Kartezyen koordinatlarda dönerkanat davranışı... 76
Şekil 3.4. Batarya geriliminin zamanla değişimi ... 76
Şekil 3.5. Kartezyen uzaydaki hatalar ... 77
Şekil 3.6. PID kontrol için referans açıları takip performansı ... 77
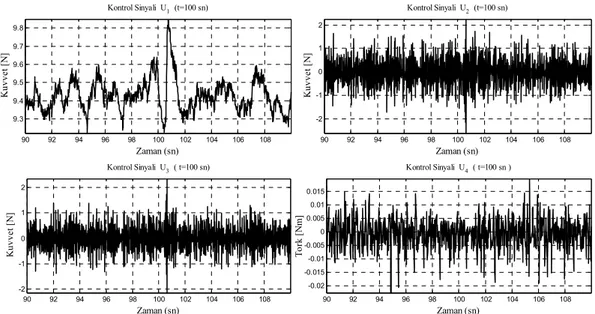
Şekil 3.7. PID kontrol yöntemi (PID ile gerçeklenen duruş kontrol) kontrol sinyalleri (geçici hal) ... 78
Şekil 3.8. PID kontrol yöntemi (PID ile gerçeklenen duruş kontrol) kontrol sinyalleri (t=100 sn) ... 78
Şekil 3.9. Eliptik gezinge için kartezyen koordinatlarda aracın konumu ... 79
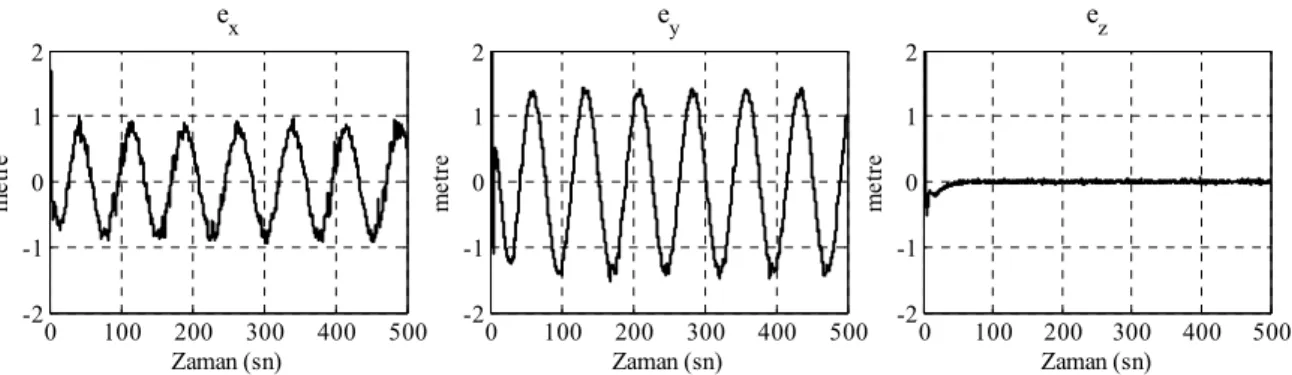
Şekil 3.10. Kartezyen koordinatlardaki hatalar ... 79
Şekil 3.11. PID kontrol için referans açıları takip performansı... 80
Şekil 3.12. Eliptik gezinge için PID kontrol sinyalleri (PID ile gerçeklenen duruş kontrol ) (geçici hal) ... 80
Şekil 3.13. Kartezyen uzayda dönerkanat davranışı ... 86
Şekil 3.14. Kartezyen uzaydaki hatalar ... 86
Şekil 3.15. KKD ile gerçeklenen duruş kontrol benzetimi için referans açıları takip performansı ... 87
Şekil 3.16. Kartezyen gezinge için KKD ile gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (geçici hal) ... 87
Şekil 3.17. Kartezyen gezinge için KKD ile gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (t=100 sn) ... 88
Şekil 3.18. Aracın faz uzayı davranışı ... 89
Şekil 3.19. Eliptik gezinge için kartezyen koordinatlarda aracın konumu ... 90
Şekil 3.20. Kartezyen uzaydaki hatalar ... 90
Şekil 3.21. KKD ile gerçeklenen duruş kontrol benzetimi için referans açıları takip performansı (geçici hal) ... 91
Şekil 3.22. Eliptik gezinge için KKD ile gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (t=100 sn) ... 91
Şekil 3.23. Aracın faz uzayındaki davranışı ... 92
Şekil 3.24. Kartezyen uzayda dönerkanat davranışı ... 99
Şekil 3.25. Kartezyen uzaydaki hatalar ... 99 Şekil 3.26. Geriadımlamalı kontrol ile gerçeklenen duruş kontrol
benzetimi için referans açıları takip performansı ... 100
Şekil 3.27. Kartezyen gezinge için geriadımlamalı kontrol ile gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (geçici hal) ... 100
Şekil 3.28. Kartezyen gezinge için geriadımlamalı kontrol ile gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (t=100 sn) ... 101
Şekil 3.29. Eliptik gezinge için kartezyen koordinatlarda aracın konumu ... 101
Şekil 3.30. Kartezyen uzaydaki hatalar ... 102
Şekil 3.31. Geriadımlamalı kontrol ile gerçeklenen duruş kontrol benzetimi için referans açıları takip performansı ... 102
Şekil 3.32. Eliptik gezinge için geriadımlamalı kontrol ile gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (geçici hal) ... 103
Şekil 3.33. Kartezyen uzayda dönerkanat davranışı ... 108
Şekil 3.34. Kartezyen uzaydaki hatalar ... 109
Şekil 3.35. Geribesleme ile doğrusallaştırmayla gerçeklenen duruş kontrol benzetimi için referans açıları takip performansı ... 109
Şekil 3.36. Kartezyen gezinge için geribesleme ile doğrusallaştırmayla gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (geçici hal) ... 110
Şekil 3.37. Kartezyen gezinge için geribesleme ile doğrusallaştırmayla gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (t=100 sn) ... 110
Şekil 3.38. Eliptik gezinge için kartezyen koordinatlarda aracın konumu ... 111
Şekil 3.39. Kartezyen uzaydaki hatalar ... 111
Şekil 3.40. Kartezyen gezinge için geribesleme ile doğrusallaştırmayla gerçeklenen duruş kontrol benzetimi için referans açıları takip performansı ... 112
Şekil 3.41. Eliptik gezinge için için geribesleme ile doğrusallaştırmayla gerçeklenen duruş kontrol benzetimi kontrol sinyalleri (geçici hal) ... 112
Şekil 4.1. Projede kullanılan gerçek zamanlı dönerkanat sistemi ... 115
Şekil 4.2. Dönerkanat gerçek zamanlı kontrol mekanizması ... 116
Şekil 4.3. Ataletsel Ölçme Birimi (3DM-GX1) ... 117
Şekil 4.4. AÖB’den Euler açılarının okunması akış diyagramı ... 118
Şekil 4.5. Motorların ürettiği manyetik alanın dönme açısının üzerindeki olumsuz etkisi ... 120
Şekil 4.6. Motorların ürettiği manyetik alanın yunuslama açısının üzerindeki olumsuz etkisi ... 120
Şekil 4.7. Motorların ürettiği manyetik alanın sapma açısının üzerindeki olumsuz etkisi ... 121
Şekil 4.8. İvmeölçerden kartezyen posizyon bilgisinin elde edilişinin akış diyagramı ... 122
Şekil 4.9. Maxbotix EZ1 ses üstü mesafe algılayıcısı ... 123
Şekil 4.10. Ham ve süzülmüş ses üstü algılayıcı verisi ... 124
Şekil 4.11. DS1104 R&D PCI Kartı ... 124
Şekil 4.12. DS1104 mimari yapısı ve fonksiyonel üniteleri ... 125
Şekil 4.13. Gerçek zamanlı DS1104 uygulama şeması ... 127
Şekil 4.14. ControlDesk’de gerçeklenen gerçek zamanlı dönerkanat uygulama ekranı-1 ... 128
Şekil 4.15. ControlDesk’de gerçeklenen gerçek zamanlı dönerkanat uygulama ekranı-2 ... 129
Şekil 4.16. AXI 2212/34 fırçasız doğru akım motoru, [45] ... 130
Şekil 4.17. JETI hız kontrolörü, [45] ... 130
Şekil 4.18. İstenen ve gerçekleşen dönme açıları ... 133
Şekil 4.19. İstenen ve gerçekleşen yunuslama açıları ... 133
Şekil 4.20. İstenen ve gerçekleşen sapma açıları ... 133
Şekil 4.21. İstenen ve gerçekleşen z pozisyonu... 134
Şekil 4.22. İstenen ve gerçekleşen x pozisyonu ... 134
Şekil 4.23. İstenen ve gerçekleşen y pozisyonu ... 135
Şekil 4.24. PID kontrol yöntemi (duruş kontrol) kontrol sinyalleri ... 135
Şekil 4.25. PID kontrol yöntemi (duruş kontrol) kontrol sinyalleri (t=50 sn) ... 136
Şekil 4.26. Gerçek zamanlı PID kontrol deneyine ait bir fotoğraf ... 136
Şekil 4.27. İstenen ve gerçekleşen dönme açıları ... 138
Şekil 4.28. İstenen ve gerçekleşen yunuslama açıları ... 139
Şekil 4.29. İstenen ve gerçekleşen sapma açıları ... 139
Şekil 4.30. İstenen ve gerçekleşen z pozisyonu... 139
Şekil 4.31. İstenen ve gerçekleşen x pozisyonu ... 140
Şekil 4.32. İstenen ve gerçekleşen y pozisyonu ... 140
Şekil 4.33. KKD yöntemi (duruş kontrol) kontrol sinyalleri (geçici hal) ... 141
Şekil 4.34. KKD yöntemi (duruş kontrol) kontrol sinyalleri (t=50 sn) ... 141
Şekil 4.35. Açısal hata vektörlerinin faz uzayi gezingeleri ... 142
Şekil 4.36. Gerçek zamanlı KKD deneyine ait bir fotoğraf ... 143
Şekil 4.37. Uygulama alanı üzerine yerleştirilmiş olan kamera ... 145
Şekil 4.38. Kameradan elde edilmiş olan görüntü ... 145
Şekil 4.39. RGB’den HSV’ye çevrilmiş olan görüntü 146
Şekil 4.40. Siyah/Beyaz görüntü 146
Şekil 4.41. Süzgeçten geçirilmiş olan görüntü 147
Şekil 4.42. Morfolojik işlemler-1 147
Şekil 4.43. Morfolojik işlemler-2 ... 148
Şekil 4.45. İstenen ve gerçekleşen yunuslama açıları ... 149
Şekil 4.46. İstenen ve gerçekleşen sapma açıları ... 150
Şekil 4.47. İstenen ve gerçekleşen x pozisyonu ... 150
Şekil 4.48. İstenen ve gerçekleşen y pozisyonu ... 150
KISALTMALAR Kısaltmalar Açıklama
DKİ Dikey Kalkış ve İniş
DGM Darbe genişlik modülasyonu PID Oransal İntegral Türevsel kontrol KKD Kayan kipli denetim
sθ sinθ
cθ cosθ
tθ tanθ
AÖB Ataletsel ölçme birimi EHK Elektronik hız kontrolörü FDA Fırçasız doğru akım motoru YSA Yapay sinir ağı
KVD Kızılberisi verici diyot
LM Levenberg-Marquardt en iyileme yöntemi GN Gauss-Newton yöntemi
1. GİRİŞ
İnsansız Hava Araçları (İHA), uzaktan kumanda edilerek ya da belli bir uçuş planı üzerinden kendiliğinden otomatik hareket kabiliyetine sahip hava araçlarıdır. İHA’lar görevlerini otomatik kontrol, görüntüleme ve haberleşme gibi alt işlevler sayesinde yerine getirmektedir. Son yıllarda teknolojide meydana gelen gelişmelerle birlikte bahsedilen alt işlevlerde önemli ilerlemeler kaydedilmiş ve İHA’ların kullanım alanı genişlemiştir. İHA’ların insanlar tarafından yerine getirmesi tehlikeli, hassas pilotaj gerektiren güvenlik, gözetim, düşman ve hedef tespiti ve takibi, zirai uygulama, trafik kontrolü, doğal afet sonrası hasar tespiti, suç mahali araştırması, sınır güvenliği sağlama ve arama kurtarma gibi geniş bir yelpazede uygulama alanı bulunmaktadır [1].
Modern İHA’ların gelişimi şu şekilde özetlenebilir: İlk İHA’lar 1910 yıllarda geliştirilmiş ve sınırlı sayıda I. Dünya Savaşı esnasında kullanılmıştır. II. Dünya Savaşı süresince önemli miktarda İHA, trenleri korumak amacıyla saldırı görevlerinde kullanılmış fakat uzun yıllar uzaktan kumandalı uçak olmaktan öteye geçememiştir. İHA’ların olgunlaşması ve otonom hale gelmeleri 80’li yıllarla başlamış, küçülen bu araçlar özellikle Amerika ve İsrail’in ilgisini çekmiştir. Bunun en önemli nedeni İHA’ların uçaklara nazaran ucuz olması ve riskli görevlerde sırasında yetişmiş mürettebat kaybını sıfıra indirmesidir. Genel olarak keşif ve gözetleme amacıyla kullanılan bu araçlar günümüzde silahlandırılmaktadır. Şekil 1.1’de görülen MQ-1 Predator modeli araçlar üzerine AGM-114 Hellfire havadan-karaya füze takılmaktadır. Bu tip zırhlı ve silahlı bu araçlara insansız hava muharebe aracı (İHMA) denilmektedir.
Şekil 1.1. MQ-1 Predator modeli İHA, [1]
Günümüzde çok farklı şekil, ebat, düzenleşim ve karakterde İHA’lar üretilmektedir. İHA’lar temelde kaldırma kuvvetini kanatları vasıtasıyla (uçak) ve pervaneleri vasıtasıyla elde eden (helikopter) araçlar olmak üzere ikiye ayrılabilir. Geleneksel sabit kanatlı İHA’lar uzun uçuş zamanına ve menziline sahip olması, kontrollerinin helikopter ve benzeri araçlara oranla kolay olmasından ötürü sıklıkla kullanılmaktadır. Günümüzde değişen koşullarla beraber zorlu arazi şartlarında görev yapmak üzere özellikle gözetleme görevlerinde manevra yeteneği yüksek İHA’lara olan gereksinim gittikçe artmaktadır. Bu nedenle manevra yeteneği kısıtlı, geleneksel sabit kanatlı yapılar yerine dönerkanat yapısına sahip dikey kalkış ve iniş (DKİ) yapabilen araçların kullanımına sıklıkla rastlanmaktadır. DKİ hava araçları, geleneksel sabit kanatlı araçların aksine sınırlı alanlardan kalkış ve iniş işlevlerini kolaylıkla gerçekleştirebilmekte, istenilen hedef üzerinde havada asılı kalabilmektedir. DKİ tipi İHA’lara manevra kabiliyeti kazandıran fiziksel yapıları kontrollerinin daha zor olmasına, karmaşık algılayıcılara gereksinim duymalarına, kısa uçuş zamanına sahip olmalarına ve yüksek hızda hesaplama yapan işlemcilere gereksinim duymalarına neden olmaktadır.
1.1. DKİ Hava Araçlarının Gelişimi
DKİ hava araçları, ilk başarılı uçuşlarından bu yana ancak bir pilotu kaldırabilen, kararsızlaşabilen yapıdan, yüksek manevra yeteneğine sahip ileri seviye araçlara dönüşmüştür. Dikey kalkış ve iniş yapabilen araçların geliştirilmesi fikri M.Ö 400
yıllarında Çin’e dayanmaktadır [2]. Şekil 1.2’de görüldüğü üzere Çin’de o devirde kullanılan çubuklar, ucuna kuş tüyü bağlanarak yeterli kaldırma kuvveti sağlanana dek çevrilmekte ve daha sonra serbest bırakıldıklarında havada bir süreliğine asılı kaldığı gözlemlenmekteydi.
Şekil 1.2. DKİ hava araçlarına ait ilk örneklerden biri (Çin sopası), [2]
Bu gelişmelerden yaklaşık 17 yüzyıl sonra 1483’de Leonardo Da Vinci hava burgusu ismini verdiği Şekil 1.3’de görülen havada asılı durabilen hava aracını tasarlamıştır [3]. Hava burgusu, 5 metre çapa sahip kaldırmayı sağlayan pervane benzeri bir yapıya sahipti. Kaldırma kuvvetinin, pervane benzeri yapının yeterli hıza ulaştığı takdirde oluşacağı fikrine dayanmaktaydı. Bazı havacılık uzmanlarına göre helikopterin atası olarak da kabul edilmektedir.
Şekil 1.3. Leonardo Da Vinci’nin hava burgusu, [3]
Sırasıyla 1754 ve 1783 yıllarında iki ilave tasarım daha Çin sopası fikrinden yola çıkılarak geliştirilmiştir. İlki Mikhail Lomonosov tarafından tasarlanmıştır. Bu tasarıma göre kaldırma kuvveti yaylı bir düzenek tarafından hareketi sağlanan koaksiyel rotorun ucunda yer alan pervaneler tarafından üretilmekteydi. Diğer tasarım ise Launoy ve Bienvenue ait olan birbirine ters yönlerde dönen hindi tüylerini kaldırma kuvveti üretmek için kullanan bir mekanizmaydı [4].
DKİ hava araçlarının gelişimi için tarih boyunca çok sayıda çalışma ortaya konmuştur. 20. yüzyılın başına kadar DKİ hava araçlarına türbin motorları gibi hareket sağlayıcı mekanizmaları uygulamak mümkün değildi. Endüstriyel devrimin başlaması ve teknolojideki hızlı ilerlemelerle hava araçlarındaki gelişim süreci de büyük hız kazanmış oldu. Bu büyük atılımlardan biri de George Cayley tarafından üretilen uçaktır [2]. Cayley’in aracına buhar makineleri güç sağlamaktaydı. Şekil 1.4’de görüldüğü üzere Cayley’in hava aracı o tarihe kadar hakim olan buhar makinelerinin ağırlıklarından dolayı hava araçlarında kullanılamayacağı savını böylelikle çürütmüş oldu.
Şekil 1.4. George Carey’in buharla çalışan converti uçağı, [2]
Helikopter terimi ilk defa 1840’lı yıllarda Ponton d’Amecourt’un tasarladığı buharla çalışan DKİ hava araçları için kullanılmıştır. Helikopter terimi Yunancada dönen pervane anlamına gelen ‘helikopteres’ sözcüğünden gelmektedir [3]. Rotor kelimesi ise hava araçlarında pervanenin yerine sıklıkla kullanılmaktadır. İlerleyen yıllarda daha birçok helikopter modeli geliştirilmiştir. Bu çalışmaların en ilgi çekenlerinden biri Thomas Edison’un elektrik motoruyla beslenen bir düzenekte çeşitli pervane tipleriyle yaptığı deneylerdir. Deneyler sonucunda en iyi kaldırma performansını büyük yarıçapa ve küçük pervane kanat1 alanına sahip pervanelerin gösterdiği sonucuna varmıştır.
Benzinle çalışan yüksek güç-ağırlık oranına sahip pistonlu motorların 1920’li yıllarda kullanım alanının genişlemesiyle yeni bir çağ açılmış, tasarım ve kontrol alanındaki buluşlarla birlikte başarılı dikey ve yatay uçuş performansları elde edilmiştir. Bu yeniçağın açılmasındaki en önemli sebep DKİ hava araçlarıyla ilgili çok sayıda araştırma ve uygulamanın yapılmasıdır.
Literatürde rastlanan ilk dört rotorlu DKİ hava aracı, George de Bothezat tarafından 1922 yılında Amerikan ordusu desteği ile üretilmiştir [5]. Şekil 1.5’de görüldüğü üzere aracın her pervanesinin altı adet kanatçığı bulunmaktaydı. Pervaneler, eksenleri içe doğru eğimli şekilde yerleştirilen metal borular üzerinde bulunmaktaydı.
Böylelikle pervaneler ağırlık merkezinin üzerinde konumlanarak sistemin kararlılığını arttırmaktaydı. Bothezat’ın tasarladığı bu hava aracının bir diğer yenilikçi özelliği de değişken açılı pervane kanatların kullanılmasıydı.
Şekil 1.5. Bothezat’ın tasarladığı dört rotorlu hava aracı, [5]
Değişken yapılı kanat yapısına sahip DKİ hava araçlarının yakaladığı başarıdan dolayı Igor Sikorsky 1939 yılında ilk günümüzün geleneksel helikopterini tasarlamıştır. Helikopter bir adet ada üç adette kuyruk rotoruna sahipti [4]. Uzunlamasına2 ve yanal3 hareketler pervane kanatlarının yunuslama4 açılarını değiştirerek gerçekleştirilmekteydi. Şekil 1.6’de görülen helikopterin sadece 75 beygir gücünde bir motoru bulunmasına karşın uzunlamasına ve yanal hareketler dışında manevraları da başarıyla gerçekleştirebilmekteydi.
2 İng. Longitudinal 3 İng. Lateral 4 İng. Pitch
Şekil 1.6. Igor Sikorsky’nin ürettiği ilk helikopter, [4]
1950’li yıllar boyunca helikopterler yeni ilerlemeler kaydetmiştir. Sikorsky yakaladığı başarıyı ilk sertifika almış ticari taşıma helikopteri Şekil 1.7’da görülen ‘S-55 Chicksaw’ modelini üreterek devam ettirmiştir [4].
Şekil 1.7. Sikorsky S-55 helikopteri, [4]
Bilimsel araştırmalar, 80’li yıllara gelindiğinde genellikle aerodinamik sınırlamalar gibi teknik problemlerin çözümüne odaklanmaktaydı. Bu sebeple geleneksel tek ana rotoru ve kuyruk rotoruna sahip helikopterler birlikte manevra kabiliyeti daha yüksek alternatif tasarımlar üzerine de çalışılmaya başlanmıştı. DKİ yapabilen farklı tipte hava aracı tasarımları dikkate alınmaktaydı. Günümüzdeyse helikopter ve türevi DKİ hava araçları gelişen teknolojiyle beraber güvenli, kullanışlı ve yüksek manevra kabiliyetine sahiptirler. Yeni nesil DKİ hava araçları gelişen motor ve pervane
teknolojisiyle giderek daha az enerjiye gereksinim duymakta, küçülmekte ve daha otonom hale gelmektedir.
1.2. DKİ Hava Araçları Üzerine Çalışmalar
DKİ hava araçlarının kullanım alanı sivil ve askeri alanlarda geniş bir yelpazede değişmektedir. Sivil alandaki uygulamalar takip, kurtarma, yangınla mücadele, araştırma vb. olarak, askeri alandaki uygulamalar ise personel sevkiyatı, mayın tarama, muharebe alanı keşfi, anti tank gibi görevlerde kullanılmaktadır.
DKİ hava araçları 5 ana başlık altında incelenmektedir.
• Geleneksel tek ana/kuyruk rotorlu düzenleşim • Tek rotorlu düzenleşim
• Çift rotorlu eş-eksenli düzenleşim • Yan yana çift rotorlu düzenleşim • Çok rotorlu düzenleşim
1.2.1. Geleneksel Tek Ana/Kuyruk Rotorlu Düzenleşim
DKİ hava araçlarında en sık rastlanan düzenleşim tek bir ana rotor ve kuyruk rotoru bulunanlardır. Kuyruk rotorunun amacı ana rotorun meydana getirdiği torku dengelemek ve helikopter havada asılı haldeyken dikey eksende kontrolü sağlamaktır. Şekil 1.8’de görülen geleneksel düzenleşimin iyi derecede kontrol edilebilme özelliği yanında manevra yeteneği de oldukça gelişmiştir. Üstün yeteneklere sahip olmasına karşın geleneksel düzenleşim karmaşık bir yapıya sahip olmasının yanında uzun bir kuyruğa ihtiyaç duymaktadır [6].
Şekil 1.8. Geleneksel tek ana/kuyruk rotorlu düzenleşim, [6] 1.2.2. Tek Rotorlu Düzenleşim
Bu düzenleşime sahip DKİ hava araçları rotorun meydana getirdiği torku kanatçıklar5 yardımıyla dengelemektedir. Araç oynak plakaya6 sahip olmadığından yunuslama ve dönme7 hareketlerini gerçekleştirebilmesi için fazladan kanatçıklara ihtiyaç duymaktadır. Şekil 1.9’da görüldüğü üzere tek rotorlu düzenleşim mekanik olarak geleneksel helikoptere göre basit olmasına karşı kontrolü daha meşakkatlidir. Aracın havada kalabilmesi için yüksek miktarda güce gereksinim duyması önemli sorunlardandır [1].
Şekil 1.9. Tek rotorlu düzenleşim, [1]
5
İng Aileron
6
1.2.3. Çift Rotorlu Eş-eksenli Düzenleşim
Şekil 1.10’da görülen geleneksel helikopter yapısına alternatif olarak ortaya çıkan çift rotorlu düzenleşimde aracın üzerinde bulunan iki rotor birbirine zıt yönlerde dönerek diğerine ait sürükleme momentini yok etmekte ve kuyruk rotoruna ihtiyacı ortadan kaldırmaktadır [7]. Rotorlar arasında oluşan açısal hız farkı aracın sağa ve sola dönmesine sebep olmaktadır. Eş-eksenli düzenleşimdeki araçlar geleneksel benzerine oranla küçük olmasına rağmen yüksek güç tüketimi ve pervane yapısından kaynaklanan sürtünme nedeniyle yavaş hareket etmesi eksik yanları olarak sayılabilir.
Şekil 1.10. Çift rotorlu eşeksenel düzenleşim, [7]
1.2.4. Yan-yana Sıralı Çift Rotorlu Düzenleşim
Yan yana8 sıralı çift rotor düzenleşimi genellikle büyük ölçekli DKİ hava araçlarında kullanılmaktadır. Rotorların birbirine zıt yönlerde dönmesinden dolayı her bir rotorun oluşturduğu tork ortadan kalkmaktadır. Rotorlar arasındaki sürtünme minimum olduğundan eş-eksenel olanlara göre yüksek verime sahip olmalarına karşı
8
kontrolleri oldukça karmaşıktır. Şekil 1.11’de görülen Boeing üretimi V-22 Osprey yeni nesil yan yana sıralı çift rotorlu araçlara örnektir [5].
Şekil 1.11. V-22 Osprey, [8]
Osprey’i benzerlerinden ayıran özelliği dikey kalkış yaptıktan sonra rotorlarını 90 derece yatay eksene doğru döndürerek yatay hareket edebilme yeneteneğidir. Bu sayede araç piste ihtiyaç duymadan istenilen yere dikey iniş ve kalkış yapabilmekte, uçak ve türevi araçlar gibi yüksek seyir hızına ulaşmaktadır.
1.2.5. Çok Rotorlu Düzenleşim
Çok rotorlu düzenleşim hava araçlarının en revaçta olan tipi dört rotora sahip dönerkanattır. Dönerkanat, dört rotoru tarafından üretilen kuvveti dengeleyerek havada kararlı şekilde durabilen ve istenilen gezingeyi takip edebilen bir araçtır. Dönerkanatın en önemli kabiliyeti yüksek manevra kabiliyetine sahip olmasıdır. Bu kabiliyeti dönerkanata tehlikeli ve dar alanlarda dikey kalkış ve iniş yapabilme yeteneği kazandırmaktadır. Dönerkanata manevra kabiliyetini kazandıran dört rotoru yüksek güç tüketimine sebep olduğundan uzun süreli uçuş görevlerini yerine getirememektedir. Ayrıca dönerkanat düşük taşıma kapasitesine sahip olduğundan İHA olarak tasarlanmakta ve çalışmalar bu doğrultuda yürütülmektedir. Şekil 1.12’de görülen dönerkanat kartezyen uzayda hareketlerini rotor hızlarını uygun şekilde değiştirerek gerçekleştirmektedir. Uygulama alanlarının çok çeşitli olması birçok girişimciyi bu alanda araştırma ve teknoloji geliştirme konusunda
cesaretlendirmektedir. Ucuz ve hafif olmaları riskli gözetim ve takip gerektiren durumlarda dönerkanat kullanımını teşvik eden temel etmenlerdendir.
Şekil 1.12. Dönerkanat, [9]
Dönerkanat tipinde İHA’ların kararlılığını koruyabilmek, dikey ve yanal hareketleri gerçekleştirebilmek için rotor açısal hızlarının ani ve doğru sırayla değiştirilmesi gerekmektedir. Bu nedenle dönerkanat kontrolünde geleneksel helikopterlerin kullandığı yavaş tepki süresine sahip türbin motorlar yerine tepki süreleri oldukça çabuk olan elektrik motorları kullanılmaktadır.
Özerk hareket eden bir İHA tasarlayabilmek için aracın bulunduğu konumu ve yönelimiyle ilgili kesin ve doğru verinin bilinmesi gerekmektedir. Dönerkanat sistemi kapalı çevrim kontrolü için gerekli olan veriler sırasıyla küresel konumlama sistemi9(KKS), ataletsel ölçü birimi10(AÖB), ses üstü algılayıcılar ve görüntü tabanlı algılayıcılar gibi araçlar yardımıyla elde edilebilmektedir. Araç ışık, ses ve manyetik etkilerin altında bulunan ideal olmayan koşullarda görev yapabileceğinden ölçüm hatalarını en aza indirmek ve güvenilirliği en yükseğe çıkarmak için gerekli veriler birden çok algılayıcı kullanılarak elde edilmektedir. Görüntü tabanlı algılayıcılar araç konumunu, iniş ve kalkış alanını tespit etmede ve hedef takibinde sıklıkla kullanılmaktadır. KKS aracın yerküre üzerindeki konumunu düzenli olarak
9
İng. Global Positioning System
10
kodlanmış bilgi yollayarak haberleşen uydu ağında uydular arasındaki mesafeyi ölçerek tespit etmektedir. AÖB aracın açısal hız, doğrusal ivme ve yerçekimi kuvveti bilgilerinin elde edilmesi amacıyla kullanılmaktadır. AÖB farklı tipte algılayıcıyı tek bir çatı altında toplamaktadır. AÖB üzerinde bulunduğu sistemin belirli eksenler etrafında meydana gelen dönüşünün açısal hızını jiroskop, doğrusal ivmesini ivmeölçer ve yerkürenin manyetik alanını ölçmek için ise manyetometre kullanmaktadır. Ses üstü algılayıcılar ise genellikle aracı yerden yüksekliğini kestirmek ve araca tehlike teşkil edebilecek engeller hakkında bilgi vermek amaçlı kullanılmaktadır. Ses üstü algılayıcılar yüksek frekansta ses dalgaları kullanarak nesnelere olan mesafeyi tayin etmektedir.
Dönerkanat tasarlama fikri daha önce de bahsedilen 1922 yılında George de Bothezat’ın ortaya çıkardığı hava aracına kadar dayanmaktadır. Proje, yapılan 100 kadar insanlı deney sonrasında istenilen performansı yakalayamadığından rafa kaldırılmıştır.
Dönerkanat kontrolü doğrusal olmayan birbiri içine geçmiş durum değişkenleri ve eksik eylenmiş11 bir yapıya sahip olduğundan kontrolü oldukça zor bir hal almaktadır. Son yıllarda modern kontrol alanındaki ve mikroişlemci teknolojisindeki gelişmelerle, literatürde kontrolü üzerine birçok çalışmaya rastlamak mümkün olmaktadır.
Altuğ vd. görsel geribesleme ile dönerkanat kontrolünü ele almış [10], iç ortam deneylerinde araç belirli bir yükseklikte kararlı halde tutulmaya çalışılmıştır. Açı bilgisi aracın üzerine yerleştirilen 3 adet dönüölçer ve pozisyon bilgisi kamera tarafından elde edilmiştir. Dönerkanatın altındaki zemine yerleştirilen kamera sistemi dönerkanat üzerinde bulunan renkli nesneyi algılamaktadır. Nesnenin daha önceden belirlenen referans noktasına göre uzaklığı geliştirilen algoritmalar sayesinde bulunmaktadır. Dönerkanat kontrolü için geribesleme ile doğrusallaştırma12 ve geriadımlamalı13 kontrol yöntemlerinden yararlanmıştır.
11
İng. Underactuated
12
Chen, dönerkanatın doğrusal olamayan modellemesinin üzerinde durmuş ve üzerinde mikroişlemci, kablosuz alıcı/verici bulunan deney düzeneği üzerinde doğrusal olmayan kontrol yöntemleri uygulamıştır [11].
Bouabdallah ve Siegwart geleneksel oransal integral türevsel (PID) ve doğrusal kuadratik kontrol yöntemlerini doğrusal olmayan dönerkanat dinamik modelini belirli bir denge noktası etrafında doğrusallaştırdıkları modele uygulamış, pek tatmin edici olmasa da aracı iç ortamda dengede tutmayı başarmışlardır [12]. Kontrol sistemi aracın yunuslama, sapma14 ve dönme açılarını sıfır derece etrafında tutma amacı gütmüşlerdir. Aynı yazarlar Şekil 1.13’de görülen dönerkanata doğrusal olmayan kontrol ve Lyapunov teknikleri uygulamış, doğrusal yöntemlere oranla gerçek zamanlı deneyler sonucunda daha iyi performans elde etmişlerdir [13].
Şekil 1.13. Boabdallah ve ekibinin ürettiği dönerkanat, [12]
Kis vd. geriadımlamalı kontrol yöntemini gömülü sistem vasıtasıyla dönerkanata uygulamış, genişletilmiş Kalman süzgeçleri yardımıyla durum tahmini sorununun üstesinden gelmiştir [14].
Bir başka çalışmadaysa Fang vd. geribeslemeli doğrusallaştırma ve kayan kipli15 denetim yöntemleriyle dönerkanat yörünge kontrolünü ele almıştır [15]. Sıfır
14
İng. Yaw
15
dinamikleri sorununu kısmi kontrol girişlerinin önüne integral alıcılar koyarak aşmıştır.
Madani ve Benallague geriadımlamalı kontrol yöntemiyle dönerkanatın tüm durum değişkenlerini kontrol ederek, aracın istenilen referans kartezyen gezingeleri izlemesi sağlamışlardır [16]. Tayebi ve McGilvray yeni bir geribeslemeli yöntem önererek dönerkanatın 16 dinamiklerini üstel biçimde kararlı hale getirmişlerdir [17].
Das vd. dinamik evirme17 yöntemini kullanarak eksik eyleyicili bir sistem olan dönerkanatın sıfır dinamiklerini kararlı hale getirmiştir [18]. Weslander vd. integral kayan kipli kontrol ile pekiştirmeli öğrenme yöntemi ile doğrusal olmayan bozucuların etkilerinin bertaraf edilebildiğini ve çok erkinli18 denetimin başarımını yörünge takibi gerçekleştirerek göstermiştir [19].
Literatürde rastlanan en dikkate değer dönerkanat çalışmalarından birisi de Hoffman vd. yaptığı çalışmadır. STARMAC ismini verdikleri dönerkanat projesinde birden fazla dönerkanat belirli yörünge üreten algoritmaların oluşturduğu gezingeleri izlemektedir. Projedeki amaç dönerkanatların tamamen otonom biçimde istenilen yörünge takip etmesidir [20]. Projede kullanılan dönerkanatlardan biri Şekil 1.14’de görülmektedir. 16 İng. Attitude 17 İng. Dynamic Inversion
Şekil 1.14. STARMAC projesinde kullanılan bir dönerkanat, [20]
1.3. Dönerkanat Kontrol Çalışmasının İçerdiği Konular
Bu tez çalışması dönerkanatın dinamik modelinin türetimi, gerçek zamanlı yapının tasarımını ve aracın kontrolünü içermektedir. Bölüm 1.2.5’de bahsedilen olumlu özellikleri dolayısıyla dönerkanat kontrolü özellikle son yıllarda dünyada ve ülkemizde üzerinde çalışmaya değer önemli projelerden biri olmuştur. Bu sebeple çeşitli üniversite ve kurumlar tamamen kendilerinin tasarladığı veya hazır prototipler üzerinde çalışmalarını yürütmekte, çeşitli yeni yöntemler sunmayı amaçlayarak literatüre katkıda bulunmaktadır. Bu tez çalışması, TOBB Ekonomi ve Teknoloji Üniversitesi İnsansız Hava Araçları laboratuarında tasarlanmış olan bir dönerkanat prototipinin kararlılığını ve belirli bir konumda kalmasını sağlamayı amaçlamaktadır. Dönerkanat sistemi kontrolünün gerçekleştirilebilmesi için dinamik model türetiminin doğru şekilde yapılması önem taşımaktadır. Modellemenin doğru şekilde yapılması sayesinde benzetim çalışmaları esnasında geliştirilen kontrol yöntemleri kısa bir uyarlama işleminin ardından gerçek zamanlı sisteme uygulanabilmektedir.
Dinamik modelin türetimindeki amaç sistem analizinin ve kontrolünün doğru şekilde yapılabilmesi için dönerkanata ait güvenilir ve gerçekçi bir matematiksel ifadenin elde edilmesidir. Bu sebeple projede dönerkanat dinamik model çıkarımı Newton-Euler yöntemi izlenerek yapılmış ve literatürde yer alan dönerkanat modelleriyle karşılaştırılarak doğrulanması amaçlanmıştır.
Dönerkanat dinamik modeli birçok araştırmacı tarafından irdelenmesine rağmen, dinamik modelin önemli bir parçası olan eyleyici itki modellemesi üzerinde fazla durulmamıştır [21]. Proje kapsamında tasarlanan kontrolörlerden en iyi verimin alınabilmesi için itki modellemesinin yapılması kaçınılmazdır. Benzetimler esnasında kontrolör tarafından üretilen sinyaller dinamik modele uygulanmaktadır ancak fiziksel sistemde aracın kontrol girişleri darbe genişliği modülasyonu19 (DGM) sinyalleri olduğundan kontrolör ve model kısımlarının uygun şekilde ayrıştırılması gerekmektedir. Bu kapsamda tezde sınırlı güç kaynakları tarafından beslenen eyleyicilerin yapay sinir ağları tarafından modellenmesi ve olumsuz etkilerin bertaraf edilmesi üzerinde de durulmaktadır.
Tezde yer alan bir diğer önemli kısım ise dönerkanat gerçek zamanlı yapı tasarımıdır. Gerçek zamanlı tasarımdaki amaç çeşitli kontrol yöntemlerinin uygulanabileceği türetilen dinamik modele yakın bir dönerkanat yapısının hazırlanmasıdır. Dönerkanat sisteminin, pervanelerin kaldırabileceğinden fazla ağırlıkta inşa edilmemesi ve kontrolör performansını düşürücü bozucu etkilerden kaçınarak üretilmesi gerekmektedir.
Kontrol yöntemleri, ilk olarak dinamik modellemesi Newton-Euler yöntemiyle çıkarılan dönerkanat sistemine Matlab/Simulink® ortamında uygulanmış ve bir kısmı gerçek zamanlı düzenekte denenmiştir. Dönerkanat kontrolü için göz önünde bulundurulan yöntemler sırasıyla klasik oransal integral türevsel (PID) kontrol, kayan kipli kontrol, geriadımlamalı kontrol ve geribesleme ile doğrusallaştırma kontrol yöntemleridir.
PID kontrol üç farklı terimden oluşan hızlı ve kolay şekilde geribeslemeli bir kontrol mekanizması tasarlanmasına olanak vermektedir. PID kontrol yönteminin temelinde yatan ana fikir hata, hatanın değişimi ve hatanın toplamından meydana gelen kontrol sinyali oluşturmaktır. Literatürde PID kontrol üzerinde çok sayıda çalışma bulmak mümkündür ve endüstride kullanılan denetleyicilerin pek çoğunun PID kontrol türevi olduğu bilinmektedir. PID kontrol yönteminin verimini arttırmak için birçok yaklaşım bulunmaktadır. Bunlardan en dikkat çekenleri integral terimindeki doyum
sorununun antiwindup yaklaşımıyla çözülmesidir. Diğer bir yaklaşım ise türev terimindeki türev tekmesi20 yani referans sinyalindeki ani değişimlerin kontrol sinyaline de yansıması sonucu sistemin kararsızlığa sürüklenmesinin önüne geçmeyi amaçlamaktadır [22]. PID kontrol yöntemi her ne kadar tasarımcıya sistem kontrolü hakkında kolaylık sağlasa da özellikle doğrusal olmayan sistemlerin kontrolünde her zaman yüksek verim elde edilememektedir. Bu sebeple tasarımcılar istenilen performans ölçütlerine ulaşabilmek için doğrusal olmayan kontrol yöntemlerine de yönelmektedir. Kayan Kipli Denetim (KKD) sıklıkla kullanılan doğrusal olmayan kontrol yöntemlerinden biridir. KKD’de felsefe, hata terimi ve hata teriminin türevinin oluşturduğu faz uzayında çekim merkezi orijinde yer alan kararlı alt uzay oluşturulmasına dayanmaktadır. Başka bir deyişle sistem gezingelerinin bu belirli alt uzayda kalmaları sağlandığında hata üstel olarak orijine yakınsamaktadır. Anahtarlamalı hiperyüzey olarak adlandırılan bu alt uzayla ilgili başka bir ilginç noktaysa işaret ve benzeri fonksiyonları kontrol sinyali olarak kullanan iki taraflı karar mekanizmasının sınırı olduğudur [23]. KKD’nin en büyük avantajı dönerkanat alt seviye kontrolünde sıkça karşılaşılan bozucu etkenlere ve modellenmedeki hatalara karşı gürbüz olmasıdır. Bu sebeple son zamanlarda araştırmacılar tarafından sıklıkla üzerinde durulmaktadır [24]. Proje kapsamında dönerkanat kontrolünde yer verilen diğer bir doğrusal olmayan yöntem ise geriadımlamalı kontroldür [25]. Geriadımlamalı kontrol yöntemi, doğrusal olmayan sistemlerin indirgenemez alt sistemlerinin, kararlılık analizinde kullanılan Lyapunov fonksiyonları yardımıyla sistematik şekilde kararlı hale getirilerek kontrol edilmesi temeline dayanmaktadır. Denetleyici tasarımı Lyapunov teoremiyle kararlılığı bilinen alt sistemden başlamakta ve Lyapunov fonksiyonları yardımıyla her bir dış alt sistem dışarıdan uygulanan kontrol terimine ulaşıncaya kadar kararlılaştırılmaktadır [26]. Son olarak geribesleme ile doğrusallaştırma kontrol yöntemi ele alınmıştır. Bu yöntem doğrusal olmayan geribesleme yardımıyla doğrusal olmayan bir sistemi doğrusallaştırma temeline dayanmaktadır [27-29]. Doğrusal model elde edildikten sonraysa doğrusal kontrol yöntemleri uygulanarak sistem kararlı duruma getirilmekte ve istenilen gezingeleri takip etmesi sağlanmaktadır.
20
Bu tez çalışmasında geçen konular şu şekilde düzenlenmiştir: İkinci bölüm dönerkanat dinamik modelinin türetilmesi ve itki eyleyici modellemesinin yapay sinir ağları tarafından gerçekleştirilmesini anlatmaktadır. Üçüncü bölüm geliştirilen kontrol yöntemlerinin benzetimler yardımıyla çıkarımı yapılan dinamik modele uygulanmasını ele almaktadır. Bunlar sırasıyla PID kontrol, KKD, geriadımlamalı kontrol ve geribeslemeli doğrusallaştırma yöntemleridir. Dördüncü bölümdeyse gerçek zamanlı kontrol çalışmaları yer almaktadır. Gerçek zamanlı tasarlanan dönerkanat yapısı üzerinde çeşitli kontrol yöntemleri denenmiştir.
2. DÖNERKANAT SİSTEMİNİN DİNAMİK MODELİNİN TÜRETİMİ
Dönerkanat tipinde insansız hava aracının dinamik modelinin türetilmesi, iyi bir kontrol performansı sağlamak amacıyla önem arz etmektedir. Dönerkanat dinamik modeli, sistemin çeşitli durumlar karşısındaki davranışlarının irdelenmesine olanak sağlamaktadır. Bu bölümde aracın dinamik modelinin türetilmesi ele alınmaktadır.
2.1. Gövde Eksenlerinde Hareketin Tanımı
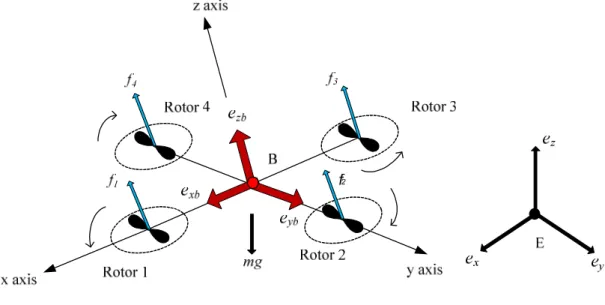
Dönerkanat tipinde İHA Şekil 2.1’de gösterildiği üzere dört adet pervanesi bulunan bir araç olarak tasvir edilebilir. Pervanelerin dönme eksenleri sabit ve birbirine paraleldir. Ayrıca pervane kanatları sabit-hatvelidir21. Pervanelerin sadece açısal hızları değiştirilerek istenen itki değerleri elde edilmektedir.
Şekil 2.1. Dönerkanat hareket tasviri
Pervane çiftleri (1,3) ve (2,4) birbirlerine ters yönlerde döndürülmektedir. Pervane hızları değiştirilerek dönerkanatın yüksekliği ve yanal hareketleri istenen değerlere getirilebilmektedir. Dört pervanenin birden hızlarını arttırmak veya azaltmak düşey eksende hareket (irtifa kazanma veya kaybetme) sağlamaktadır. 2 ve 4 numaralı
21
pervanelerin hızlarının ters orantılı olarak değiştirilmesi dönme hareketine yani y (veya -y) ekseni etrafında dönme hareketine, 1 ve 3 numaralı pervanelerin hızlarının ters orantılı olarak değiştirilmesi ise yunuslama hareketine yani x (veya -x) ekseni yönünde yanal harekete, pervanelerin birbirine göre hızlarının farklarının oluşturduğu sürükleme torku ise sapma hareketine sebep olmaktadır [30].
2.2. Dinamik Modelin Türetilmesi
Bu kısımda Newton-Euler yaklaşımından yararlanılmış olup aşağıdaki varsayımlar göz önünde bulundurulmuştur.
• Dönerkanat sistemi katı gövde22 kabul edilmektedir. • Dönerkanat sistemi simetrik kabul edilmektedir.
• Sistemin ağırlık merkezi ile gövde ilişik koordinat düzlemi merkezi çakışık kabul edilmektedir.
• Pervaneler katı gövde kabul edilmektedir. • Yer etkisi23 ihmal edilmektedir.
• İtki kuvveti ve motor burusu pervane açısal hızının karesiyle doğru orantılı kabul edilmektedir.
2.2.1. Newton-Euler Yaklaşımı
Dönerkanat gövdesinin ağırlık merkezine dışarıdan uygulanan kuvvetler neticesinde ortaya çıkan dinamikleri sabit koordinat düzleminde tasvir edildiği takdirde
3 3 0 0 m × ×m + = × I V ω V F I ω ω Iω τ & & (2.1)
(2.1) ifadesinde I köşegen atalet momentini, ω açısal gövde hızını24, V doğrusal gövde hız vektörünü25 tasvir etmektedir ve aşağıda belirtildiği gibi özetlenebilir.
22 İng. Rigid Body 23 İng. Ground Effect 24
= ζ& v (2.2) 1 z z g TR m = − + v& e e (2.3) f g = − × + −
Iω& ω Iω τ τ (2.4)
sk( )ω =R RT & (2.5)
Denklem (2.2)’de yer alan ζ = (x, y, z)T vektörü gövdeye bağlı eksen takımının26 merkezinin yerküreye bağlı eksen takımına27 göre yerini, denklem (2.3)’deki v = (vi, vj, vk)T vektörü yerküreye bağlı eksen takımında doğrusal hızları belirtmektedir.(i, j, k araçta x, y, z eksenlerine denk düşmektedir.) Denklem (2.3)’de T pervanelerin oluşturduğu itki kuvvetini, R denklem (2.7)’de belirtilen dönüşümü, g yerçekimi ivmesini ve ez birim vektörün z bileşenini temsil etmektedir. Denklem (2.3)’de
yalnızca birim vektörün z bileşeninin bulunup x ve y bileşenlerinin bulunmamasının sebebi itki kuvvetinin ez birim vektörüne paralel olmasıdır. Bu durumda aracın
sadece vz doğrusal hıza sahip olacağı aşikardır. Araç her bir pervanenin oluşturduğu itki kuvvetini uygun şekilde değiştirilmesiyle x ve y eksenleri etrafında döndürüldüğünde ise x ve y eksenlerinde de doğrusal hızlar gözlemlenmektedir. Denklem (2.4) gövdenin açısal hareketini ifade etmektedir. τf dört pervanenin aracın dönme ekseni etrafnda meydana getirdiği torku, τg ise pervanelerin oluşturduğu jiroskopik etkilerden kaynaklanan torku göstermektedir. Denklem (2.5) deki sk(ω) matrisi sk(ω)V= ω×V ifadesini sağlamaktadır ve ω vektörü yardımıyla ters bakışımlı sk(ω) matrisi (2.6) ifadesindeki gibi gösterilmektedir.
3 2 3 1 2 1 0 ( ) 0 0 sk −Ω Ω = Ω −Ω −Ω Ω ω (2.6) 26
İng. Body Fixed Coordinate Frame
27
Yerküreye bağlı eksen takımının E={ex, ey, ez} ve gövdeye bağlı eksen takımının
B={exb, eyb, ezb} olarak gösterildiği varsayılırsa (Bkz. Şekil 2.2), Euler açıları
cinsinden B eksen takımının E eksen takımının etrafında sırasıyla ψ,θ,φ açılarıyla döndürüldüğü düşünülürse buna göre B eksen takımındaki yönelmeleri E eksen takımına R dönüşümüyle aktarabiliriz. Buna göre R ile gösterilen dönüşüm matrisi (2.7) ifadesindeki gibi olacaktır [31].
( , , ) c c c s s s c c s c s s R s c s s s c c s s c s c s c s c c ψ θ ψ θ φ ψ φ ψ θ φ ψ φ φ θ ψ ψ θ ψ θ φ ψ φ ψ θ φ φ ψ θ θ φ θ φ − + = + − − (2.7)
Yukarıda sθ =sin ,θ cθ =cosθ trigonometrik büyüklüklerine tekabül etmektedir.
Şekil 2.2. Koordinat Sistemi Tanımları
2.2.2. Euler Denklemleri
Katı gövdenin üç boyutlu hareketini tanımlayan denklemler Euler denklemleri olarak tanımlanmaktadır. Euler denklemleri, Newton’un ikinci hareket kanununa dayanmaktadır.
m =
Buna göre katı gövde üzerine etkiyen kuvvet, gövdenin kütlesiyle ağırlık merkezinin ivmesinin çarpımına eşittir. Açısal hareketin denkleminin çıkarımında katı gövdenin sabit bir nokta etrafında dönmesi ve katı gövdenin genelleştirilmiş üç boyutlu hareketi dikkate alınmış olup, kartezyen hareketin denkleminin çıkarımında ise denklem (2.8)’deki Newton’un ikinci hareket kanunundan yararlanılmıştır.
Dışarıdan kuvvet uygulanarak O ile gösterilen başlangıç noktası etrafında oluşan momentlerin toplamı (Bkz. Şekil 2.3), toplam açısal momentumun28 O noktası etrafındaki zamana göre türevine eşittir ve (2.9) ifadesinde verilmektedir [32, 33].
d d o o t =
∑
M L (2.9)Katı gövde O noktası etrafında ω açısal hızıyla döndüğünde i’nci parçacığın hızı ise (2.10) ile verilen şekildedir.
d d i i t = × r ω r (2.10)
Toplam açısal momentum denklem (2.10) katılarak yazılırsa (2.11) ifadesi elde edilir. d d i o i mi t =
∑
× r L r (2.11)Denklem (2.11)’de belirtilen m i. parçacığın kütlesini ifade etmektedir. Katı gövde i sonsuz sayıdaki i parçacığından meydana gelmektedir. Birinci referans koordinat düzleminin Şekil 2.3’de gösterildiği üzere orijini O olduğu ve xyz adında ikinci bir eksen takımı tanımlandığı varsayılsın. İkinci eksen takımının birinci eksen takımına göre açısal hız vektörünün Ω olduğu ve Şekil 2.3’de bulunan katı gövdenin birinci eksen takımına göre açısal hızının ω olduğu varsayılsın. Burada dönerkanat gövdesi katı gövde, ikinci eksen takımı ise gövdeye bağlı eksen takımı olarak düşünüldüğü takdirde Ω = ω olarak alınabilir [32, 33].
28
Ω ω x z y i j k
Şekil 2.3. Birinci (a), ikinci referans (b) eksen takımı (c) katı gövde gösterilmiştir.
Bu şartlar altında ω ve ri yazıldığı takdirde (2.12) ve (2.13) ifadeleri elde edilir.
ωx ωy ωz
= + +
ω i j k (2.12)
i =xi +yi +zi
r i j k (2.13)
(2.12) ve (2.13) ifadelerinde xi, yi, zi i. parçacığın koordinatlarını temsil etmektedir. Elde edilen (2.12) ve (2.13) numaralı denklemleri (2.10) ifadesinde yerine konursa aşağıdaki (2.14) ifadesi elde edilir.
( ) ( ) ( )
o =
∑
xi +yi +zi ×mi ωx +ωy +ωz × xi +yi +ziL i j k i j k i j k (2.14)
İşleminin yapılmasına yardımcı olması açısından birim vektör çarpımları açık haliyle
× =
i j k,j k× =i,k i× = j,i i× =0,j j× =0,k k× =0 şeklinde verilebilir. Aracın dönüşünden dolayı her bir eksene göre oluşan atalet momentleri (2.15) - (2.17) ifadelerindeki gibidir. 2 2 ( ) xx i i i i I =
∑
m y +z (2.15)2 2 ( ) yy i i i i I =
∑
m x +z (2.16) 2 2 ( ) zz i i i i I =∑
m y +x (2.17)(2.18) - (2.20) ifadeleri atalet çarpımlarını ifade etmektedir.
( ) yx xy i i i i I =I =
∑
m x y (2.18) ( ) xz zx i i i i I =I =∑
m x z (2.19) ( ) yz zy i i i i I =I =∑
m y z (2.20)Açısal momentum vektörü bileşenleri şeklinde yazılırsa (2.21a) - (2.21c) ifadeleri elde edilir. ox =Ixx x−Ixy y−Ixz z L ω ω ω (2.21a) oy = −Iyx x+Iyy y−Iyx z L ω ω ω (2.21b) oz = −Izx x−Izy y+Izz z L ω ω ω (2.21c)
Açısal momentum vektörü (2.22) ifadesi gibi yazılabilir.
o =Lox +Loy +Loz
L i j k (2.22)
Yukarıdaki açısal momentum vektörünün zamana göre türevi alınırsa (2.23) ifadesi halini almaktadır.
d d d d d d d d oy o Lox L Loz t = t + t + t L i j k (2.23)
Birim vektörlerin zamana göre türevleri açısal hız Ω cinsinden yazıldığı takdirde (2.24a) - (2.24c) ifadeleri elde edilir [32].
d dt = × i Ω i (2.24a) d dt = × j Ω j (2.24b) d dt = × k Ω k (2.24c)
Denklem (2.9) gerekli işlemler yapıldıktan sonra (2.25) ifadesine dönüşmektedir.
( ) y x z o o dL dL dL dt dt dt = + + + ×
∑
M i j k Ω L (2.25)Katı cismin ağırlık merkeziyle dönme merkezinin çakışık olduğu varsayımıyla (Lo=L) (2.26) yazılabilir [32]. ( ) ( ) [( ) ( ) ( )] x y z xx x xy y xz z yz x yy y yz z zx x zy y zz z I I I I I I I I I × = + + × − − + + − + − − + Ω L Ω Ω Ω ω ω ω ω ω ω ω ω ω (2.26)
Denklem (2.25) alınıp (2.26) ifadesinin içine yazıldığında ve x, y, z bileşenlerine ayrıldığında ağırlık merkezine göre toplam moment (2.27a) - (2.27c) şeklindedir.
d d d d d d ( ) ( ) y x z ox xx xy xz z yx x yy y yz z y zx x zy y zz z I I I t t t I I I I I I = − − − − + − + − − +
∑
M ω ω ω Ω ω ω ω Ω ω ω ω (2.27a)d d d d d d ( ) ( ) y x z oy yx yy yz z xx x xy y xz z x zx x zy y zz z I I I t t t I I I I I I = − + − + − − − − − +
∑
M ω ω ω Ω ω ω ω Ω ω ω ω (2.27b) d d d d d d ( ) ( ) y x z oz zx zy zz y xx x xy y xz z x yx x yy y yz z I I I t t t I I I I I I = − − + − − − + − + −∑
M ω ω ω Ω ω ω ω Ω ω ω ω (2.27c)Toplam momentler matris eşitlikleri şeklinde yazıldığında (2.28) elde edilir.
d d 0 d 0 d 0 d d x xx xy xz z y xx xy xz ox x y oy yx yy yz z x yx yy yz y y x oz zx zy zz z zx zy zz z t I I I I I I I I I I I I t I I I I I I t − − − − − = − − + − − − − − − − − ∑ ∑ ∑ ω Ω Ω M ω ω M Ω Ω ω Ω Ω M ω ω (2.28)
2.2.3. Açısal Hızlar-Euler Açıları Dönüşümü
Dönerkanat sisteminin gövde dönüş hareketlerini ölçecek olan ataletsel ölçü birimi bu işlemi yaparken Euler açılarını θ φ ψ kullanmaktadır. Bu sebepten açısal gövde , ,
hızları29 cinsinden olan hesaplamaların bir dönüşüm yardımıyla Euler açıları cinsine çevrilmesi gerekmektedir. İşlemler yerküreye bağlı eksen takımı üzerinden yapılmaktadır [33]. Sırasıyla
• Birinci adımda z ekseni etrafında ψ açısıyla • İkinci adımda y ekseni etrafında θ açısıyla • Üçüncü adımda x ekseni etrafında φ açısıyla döndürüldüğünde (2.29) elde edilir.
29
1 0 0 sec sec s t c t c s s c φ φ θ φ θ θ φ φ ψ φ θ φ θ = − p q r & & & (2.29)
(2.29)’da p, q, r gövde açısal hızlarını belirtmektedir ve sθ =sinθ, tθ =tanθ, cθ =cosθ büyüklüklerini ifade etmektedir.
p, q, r sırasıyla (2.30a) - (2.30c) ifadeleriyle verilmektedir.
sin
φ ψ θ
= −
p & & (2.30a)
cos sin cos
θ φ ψ φ θ
= +
q & & (2.30b)
cos cos sin
ψ θ φ θ φ
= −
r & & (2.30c)
Açıların küçük olduğu varsayımı altında (2.30a) - (2.30c) ifadeleri sırasıyla (2.31a) - (2.31c) ifadelerine dönüşür [33]. x ω φ = = p & (2.31a) y ω θ = = q & (2.31b) z ω ψ = = r & (2.31c)
2.2.4. Dönerkanat Üzerine Etkiyen Kuvvetler ve Momentler
Dönerkanatın dönme hareketini tasvir eden ifadeler (2.28) denkleminde verilmişti. Aracın dönüş simetrisinden dolayı Ixy,Ixz,Izy atalet momentleri sıfır olmaktadır. Bu durumda Iyy =Ixx sağlanacaktır [32]. Bu bilgiler ışığında her bir eksene göre momentler düzenlenirse (2.32a) - (2.32c) ifadeleri elde edilir.
![Şekil 1.6. Igor Sikorsky’nin ürettiği ilk helikopter, [4]](https://thumb-eu.123doks.com/thumbv2/9libnet/3765819.28927/22.892.290.669.104.372/şekil-igor-sikorsky-nin-ürettiği-ilk-helikopter.webp)
![Şekil 1.8. Geleneksel tek ana/kuyruk rotorlu düzenleşim, [6] 1.2.2. Tek Rotorlu Düzenleşim](https://thumb-eu.123doks.com/thumbv2/9libnet/3765819.28927/24.892.290.669.105.376/şekil-geleneksel-kuyruk-rotorlu-düzenleşim-tek-rotorlu-düzenleşim.webp)
![Şekil 2.4. Kontrol sinyallerinin dinamik modeli kontrol edecek uygun hale dönüşümü, [36]](https://thumb-eu.123doks.com/thumbv2/9libnet/3765819.28927/58.892.209.734.216.649/şekil-kontrol-sinyallerinin-dinamik-modeli-kontrol-edecek-dönüşümü.webp)
![Şekil 3.15. KKD ile gerçeklenen duruş kontrol benzetimi için referans açıları takip performansı 0 1 2 3 4 5 6 7 8 9 101012141618 Zaman (sn)Kuvvet [N]](https://thumb-eu.123doks.com/thumbv2/9libnet/3765819.28927/102.892.174.779.115.427/şekil-gerçeklenen-kontrol-benzetimi-referans-açıları-performansı-kuvvet.webp)