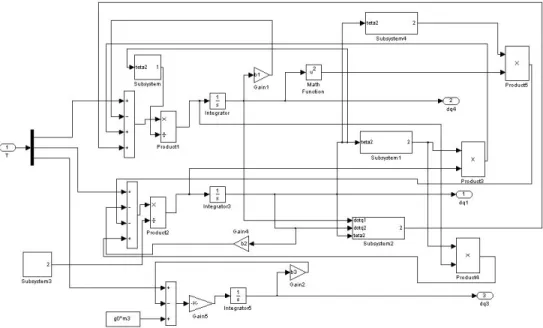
Scara tip bir robotun yörünge kontrolünde pid kontrol uygulaması
Tam metin
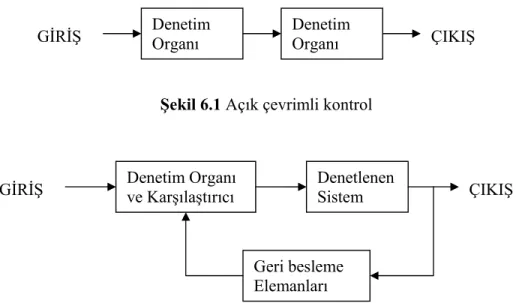
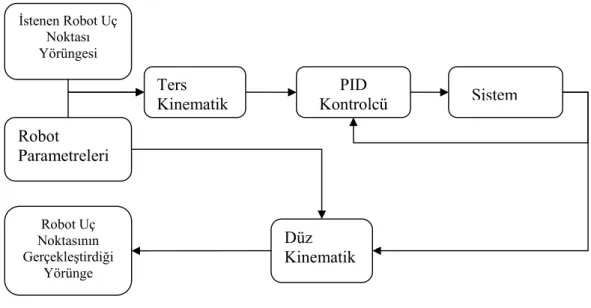
Şekil

Benzer Belgeler
Transcranial Doppler in acute ischemic stroke of the middle cerebral artery territories. Acta Neurol
Misafir, vizesini ve vize hizmetini Mavirota Turdan aldıysa ve Mavirota Tur ilgili turu yetersiz katılım veya başka bir sebeple iptal ederse, misafirin vizesini vize bitiş tarihinden
Otomotiv Sektörü: 2016 yılı Ocak-Ekim döneminde bir önceki yılın aynı dönemine göre, toplam üretim %7, otomobil üretimi ise %15 oranında arttı.. Bu dönemde, toplam
Her gün 10 m derinliğe inen sondaj makinesi 12 gün sonunda suyun olduğu derinliğe
Önümüzdeki yıllarda uluslararası mobil telekomünikasyonun performansını artıracak 5G iletişim altyapısı, yüksek kaliteli ve uygun maliyetli kalıp döküm
Buna göre aşağıdakilerden hangisinin yurtdışına göç ederek yerleşmesi beyin göçü olarak değerlendirilemez?. A-Beyin cerrahı Ali Bey’in B-İnşaat işçisi
Bir üniteyi kapsayan, orta ve ileri düzey sorulardan oluşan..
Hiçbir şekil ve surette ve her ne nam a ltında olursa ols un, her türlü gerçek ve/veya tüzel kişinin, gerek dorudan gerek dolayısı ile ve bu sebeplerle uğrayabileceği he r
