1
HELİKOPTER UÇUŞ SİMÜLATÖRLERİ İÇİN UYARLANABİLİR YAPIDA KUMANDA YÜKLEME SİSTEMİ GELİŞTİRİLMESİ
MEHMET MURAT AYGÜN
YÜKSEK LİSANS TEZİ
MAKİNE MÜHENDİSLİĞİ
TOBB EKONOMİ VE TEKNOLOJİ ÜNİVERSİTESİ
FEN BİLİMLERİ ENSTİTÜSÜ
Nisan 2014
i Fen Bilimleri Enstitü onayı
_______________________________ Prof. Dr. Necip CAMUŞCU
Müdür
Bu tezin Yüksek Lisans derecesinin tüm gereksinimlerini sağladığını onaylarım.
_______________________________ Doç. Dr. Murat AKTAŞ Anabilim Dalı Başkanı
Mehmet Murat AYGÜN tarafından hazırlanan HELİKOPTER UÇUŞ SİMÜLATÖRLERİ İÇİN UYARLANABİLİR YAPIDA KUMANDA YÜKLEME SİSTEMİ GELİŞTİRİLMESİ adlı bu tezin Yüksek Lisans tezi olarak uygun olduğunu onaylarım.
_______________________________ Yrd. Doç. Dr. Yiğit TAŞCIOĞLU
Tez Danışmanı Tez Jüri Üyeleri
Başkan : Prof. Dr. Ömer KELEŞ ___________________________
Üye : Yrd. Doç. Dr. Yiğit TAŞCIOĞLU ___________________________
ii
TEZ BİLDİRİMİ
Tez içindeki bütün bilgilerin etik davranış ve akademik kurallar çerçevesinde elde edilerek sunulduğunu, ayrıca tez yazım kurallarına uygun olarak hazırlanan bu çalışmada orijinal olmayan her türlü kaynağa eksiksiz atıf yapıldığını bildiririm.
iii
Üniversitesi : TOBB Ekonomi ve Teknoloji Üniversitesi
Enstitüsü : Fen Bilimleri Enstitüsü
Anabilim Dalı : Makine Mühendisliği
Tez Danışmanı : Yrd. Doç. Dr. Yiğit TAŞCIOĞLU
Tez Türü ve Tarihi : Yüksek Lisans – Nisan 2014
MEHMET MURAT AYGÜN
HELİKOPTER UÇUŞ SİMÜLATÖRLERİ İÇİN UYARLANABİLİR YAPIDA KUMANDA YÜKLEME SİSTEMİ GELİŞTİRİLMESİ
ÖZET
Bu çalışmada helikopter uçuş simülatörleri için yüksek doğrulukta Kumanda Yükleme Sisteminin (KYS) tasarımı ve prototip üretimi gerçekleştirilmiştir. KYS, uçuş simülatörlerinin önemli alt sistemlerindendir ve pilotlara kuvvet tepkisi uygulayarak uçuşun dokunsal algı yoluyla hissedilmesini sağlar. Helikopterde, kontrol yüzeylerini hareket ettirmek için kumanda uvuzlarına pilotlar tarafından kuvvet uygulanması gerekir. Simülatörde ise kumanda uzuvlarını hareket ettirmek için uygulanması gereken kuvvetler KYS eyleyicileri tarafından üretilir. Bu yüzden de KYS, helikopter mekanik uçuş kontrol donanımı ile statik ve dinamik olarak aynı davranmalıdır. Simüle edilen kuvvetlerin doğruluğu uçuş simülatörünün sertifikasyonu açısından önemli rol oynamaktadır. Farklı simülatör ve helikopter modellerine kolayca uyarlanabilmesi açısından KYS’nin parametrik olması önemlidir. Bu çalışma aynı zamanda test amacı ile araştırma simülatörü geliştirilmesi için gerekli olan helikopter matematiksel modellemesi ve görsel sistemin oluşturulması ve tüm bu sistemlerin entegrasyonunu da içermektedir. KYS ve simülatörün tasarım, donanım ve yazılım bileşenleri tüm sistem yapısı ile birlikte anlatılmaktadır.
Anahtar Kelimeler: Helikopter, Uçuş Simülatörü Kumanda Yükleme Sistemi, Simülatör tasarımı, Uçuş Simülasyonu
iv
University : TOBB University of Economics and Technology Institute : Institute of Natural and Applied Sciences
Science Programme : Mechanical Engineering
Supervisor : Asst. Prof. Dr. Yiğit TAŞCIOĞLU
Degree Awarded and Date : M.Sc. –April 2014
MEHMET MURAT AYGÜN
DEVELOPMENT OF A RECONFIGURABLE CONTROL LOADING SYSTEM FOR HELICOPTER FLIGHT SIMULATOR
ABSTRACT
The focus of this study is on the development of a high-fidelity electro-mechanical Control Loading System (CLS) for a helicopter simulator.CLS is one of the major components of a flight simulator. It is used for providing realistic force feedback to pilots. The pilot in a real aircraft feels the forces acting on control surfaces through cockpit controls. During simulation, these forces are produced by CLS actuators. For that reason, the CLS must behave exactly like the aircraft control hardware statically and dynamically. The fidelity of the force feel simulation is a key criterion for flight simulation certification. It is also important that a CLS design is reconfigurable and modular such that it conforms easily to different simulator models and simulations of different aircrafts. The study also includes helicopter mathematical modeling and visual system integration of a research simulator for testing purposes. Design and selection of hardware and software components of the CLS and the simulator are presented along with the overall system architecture.
Keywords: Helicopter, Flight Simulator, Control Loading System, Simulator Design, Flight Simulation
v
TEŞEKKÜR
Çalışmalarım boyunca engin tecrübesini, zamanını, desteğini ve hoşgörüsünü benden esirgemeyen hocam ve danışmanım Yrd. Doç. Dr. Yiğit Taşçıoğlu’na ve kıymetli tecrübelerinden faydalandığım TOBB Ekonomi ve Teknoloji Üniversitesi öğretim üyelerine ve asistan arkadaşlarıma teşekkürü bir borç bilirim.
Tecrübelerini benimle paylaşan, çalışmalarım boyunca desteklerini ve yardımlarını eksik etmeyen tüm HAVELSAN çalışanlarına teşekkür ederim.
Bu tez çalışması 01049.STZ.2011-2 numaralı proje kapsamında Bilim, Sanayi ve Teknoloji Bakanlığı tarafından desteklenmiştir.
vi İÇİNDEKİLER TEZ BİLDİRİMİ ... ii ÖZET... iii ABSTRACT ... iv TEŞEKKÜR ... v ÇİZELGELERİN LİSTESİ ... ix ŞEKİLLERİN LİSTESİ ... x KISALTMALAR ... xiv 1. GİRİŞ ... 1 1.1. Amaç ve Kapsam ... 3
2. Uçuş Simülatörleri için Kumanda Yükleme Sistemleri ... 5
2.1. Kontrol Sistemi ... 6
2.2. Mekanik Tasarım ... 12
2.2.1. Modüler Kumanda Yükleme Sistemleri... 12
2.2.2. Eklemli Kumanda Yükleme Sistemleri ... 14
2.3. Standartlar ... 16
3. KUMANDA KUVVETLERİNİN ÖLÇÜMÜ VE MODELLENMESİ ... 19
3.1. Mekanik Kumanda Sistemi ... 19
3.2. Kumanda Simülasyon Modeli Kuvvetlerinin Hesaplaması ... 22
3.3. Kumanda Kuvvetlerinin Ölçümü ... 24
3.3.1. Konuma Karşı Kuvvet Ölçümleri ... 25
3.3.2. Zamana Karşı Konum Ölçümleri ... 27
3.4. Kuvvet Ölçümlerinin Doğrusallaştırılması ... 27
4. KUMANDA YÜKLEME SİSTEMİ TASARIMI ... 29
4.1. Donanım Bileşenleri... 29
4.1.1. Mekanik Aksamın Tasarımı ... 29
4.1.2. Pilot Kumandaları ... 31
4.1.3. Aktarma Oranlarının Hesaplanması ... 31
4.1.4. Elektromekanik Bileşenlerin Seçimi ... 34
4.2. Kontrol Sistemi ... 36
vii
4.2.2. EtherCAT haberleşme protokolü ... 38
4.2.3. EtherCAT Merkez Bilgisayarının Yapılandırılması ... 41
4.2.4. İç Çevrim Motor Girdilerinin Hesaplanması ... 44
4.2.5. KYS Simulink Modeli ... 46
5. GÖRSEL SİMÜLASYON MODELİ ... 49
5.1. Helikopter Dinamik Modelleri ... 49
5.2. Cougar Helikopterinin Modellenmesi ... 52
5.3. Dış Dünya Modeli ... 54
6. SİSTEM ENTEGRASYONU ... 60
6.1. Test Platformu ... 60
6.2. Yazılım Entegrasyonu ... 62
7. SİSTEM DOĞRULAMA ... 65
7.1. Kumanda Konum Bilgilerinin Doğrulanması ... 65
7.2. Uçuş Modelinin Testi ... 68
7.3. Kuvvet Dönüşüm Modeli Analizi ... 71
7.4. KYS Model Parametreleri ve Uyarlanabilirlik ... 73
7.5. KYS Kuvvetlerinin Doğrulanması ... 78
7.6. KYS Simülatörü ile Uçuş Testi ... 90
8. SONUÇLAR ... 91
KAYNAKLAR ... 92
ÖZGEÇMİŞ ... 99
EK 1 Cougar AS532 Kuvvet/Pozisyon Ölçümleri ... 101
EK 2 Motor ... 110
EK 3 Sürücü ... 112
EK 4 Tork Modu Sinyal Akış Diyagramı ... 113
EK 5 Yük Hücresi ... 114
EK 6 Cougar AS532 Modeli için Veriler ... 115
EK 7 Matematiksel Model Çıktıları ... 117
EK 8 Görüntülerin Ekranlara Dağıtılması ... 118
EK 9 KYS Simülatörünün 3D Görselleri ... 121
viii
ix
ÇİZELGELERİN LİSTESİ
Tablo 1. Helikopter kumandalarından konuma karşı kuvvet ölçülen durumlar... 25
Tablo 2. KYS eksenlerinde maksimum kuvvetler, aktarma oranları ve motor torkları ... 34
Tablo 3. Helidyn teori ve kütüphaneleri ... 52
Tablo 4. Dış dünya modeli programlarının karşılaştırılması ... 54
Tablo 5. Modelde veri akışı sırasındaki birim değişiklikleri ... 64
Tablo 6. xPC target işlem süresi ... 65
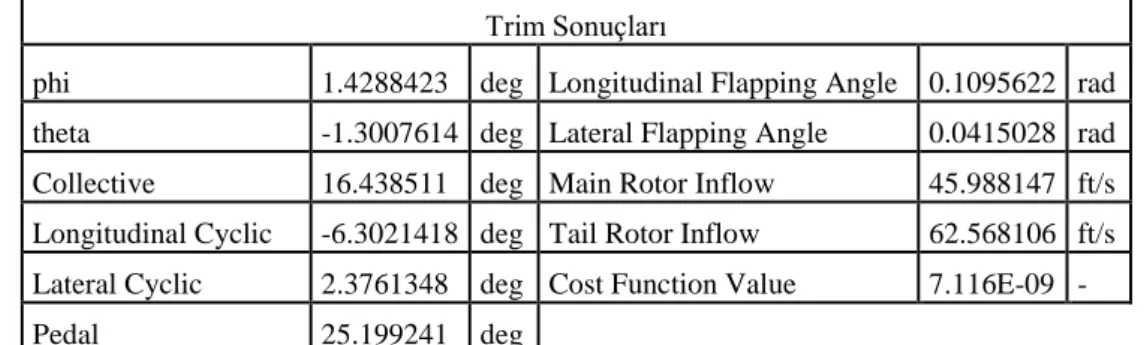
Tablo 7. 1000 ft’de sıfır knot da uçuş için trim değerleri ... 67
Tablo 8.1000ft de farklı hızlarda trim sonuçları ... 67
Tablo 9. Cougar AS532 Hareket Limitlerinin eşleştirilmesi ... 67
Tablo 10. Hareket Limitlerinin Oyun kumanda kolu için eşleştirilmesi ... 68
Tablo 11. Sürücü maksimum amper değerleri ... 72
x
ŞEKİLLERİN LİSTESİ
Şekil 1.Delft üniversitesi tam görev uçuş simülatörü SIMONA [7] ... 1
Şekil 2.Pilot kabininin robot koluna bağlandığı uçuş simülatörü [14] ... 2
Şekil 3.Tam görev simülatörü alt sistemleri ... 3
Şekil 4. Cougar AS532 fotoğrafı [18] ... 4
Şekil 5.Kumanda Yükleme Sistemi şeması ... 5
Şekil 6.Hidrolik eyleyicili KYS yapısı [21] ... 6
Şekil 7. Kontrolcü Diyagramı ([19]’dan tercüme edildi) ... 7
Şekil 8. KYS (a) konum, (b) hız ve (c) kuvvet çevrimleri [17] ... 9
Şekil 9. Yer değiştirme, diferansiyel basınç ve oransal geri beslemeli kontrol yapısı [29] ... 10
Şekil 10. Dinamik yük simülatörü şematiği [30] ... 11
Şekil 11. Wittenstein firmasının modüler yapılı kumanda yükleme sistemi [43] ... 12
Şekil 12. (a) Kuvvet geri beslemeli kumanda kolu ve (b, c)çalışma uzayı [46] ... 13
Şekil 13.Kumanda kolu tasarımı [47] ... 14
Şekil 14. Dört kanallı, tork motorlu KYS [19]... 14
Şekil 15. XV-15 simülatörü kontrol yükleme sistemi ... 15
Şekil 16. Pilot görüşüne dayalı ince ayar işleminin akış diyagramı [11] ... 18
Şekil 17. Mekanik kumanda sistemi [52] ... 20
Şekil 18. Kumanda sistemi diyagramı [32] ... 21
Şekil 19. Yük hücresi ve açıölçer ile kuvvet ölçümü ... 23
Şekil 20. Örnek kuvvet-konum grafiği... 24
Şekil 21. Yuvarlanma Kanalı, trim ortada durumunda alınan konuma karşı kuvvet ölçümü ... 26
Şekil 22. Yunuslama kanalının zamana karşı konum grafiği ... 27
Şekil 23. Doğrusallaştırılmış konuma karşı kuvvet grafiği örneği ... 28
Şekil 24 KYS ön tasarım evrimi ... 29
Şekil 25. KYS mekanik tasarımı ... 30
Şekil 26.Pilot kumandaları ... 31
Şekil 27. Motor bağlantı çubuğu ... 32
xi
Şekil 29. Saykılık mekanizması ... 33
Şekil 30.Kolektif mekanizması ... 33
Şekil 31. PARKER 300ST2M tork motorunun tork/hız karakteristiği ... 35
Şekil 32.Kuvvet sensörü bağlantısı ... 35
Şekil 33. İç çevrim şeması ... 36
Şekil 34.xPC Target bağlantı şeması[39] ... 37
Şekil 35.EtherCAT iletişim şeması [54] ... 38
Şekil 36. EtherCAT veri yapısı [54] ... 39
Şekil 37. EtherCAT yapılandırması [56] ... 40
Şekil 38. EtherCAT çalışma durumları [56] ... 41
Şekil 39. EtherCAT merkez–uydu bağlantısı ... 41
Şekil 40. Değiştirilmiş ESI xml dosya içeriği ... 42
Şekil 41. EtherCAT yapılandırma programı sistem ağacı ... 43
Şekil 42. EtherCAT girdi bloğu ... 44
Şekil 43. Ham ve filtrelenmiş hız verisi ... 45
Şekil 44.KYS Simulink modeli ... 46
Şekil 45. Yunuslama kanalı KYS modeli ... 47
Şekil 46. Yunuslama kanalı KYS modeli ... 48
Şekil 47. Kolektif kanalı KYS modeli ... 48
Şekil 48. XV-15 mühendislik uçuş simülatörünün veri akış şeması [41] ... 50
Şekil 49. Modelica ortamında helikopter simülasyonunun ana hatları [35] ... 51
Şekil 50. HeliDyn+ DLL dışa aktarım menüsü ... 53
Şekil 51. HeliDyn'ın Simulink bloğu ... 53
Şekil 52.Görsel sistem Simulink modelinin genel yapısı... 55
Şekil 53. Geodetic ve NED koordinat sistemleri ... 56
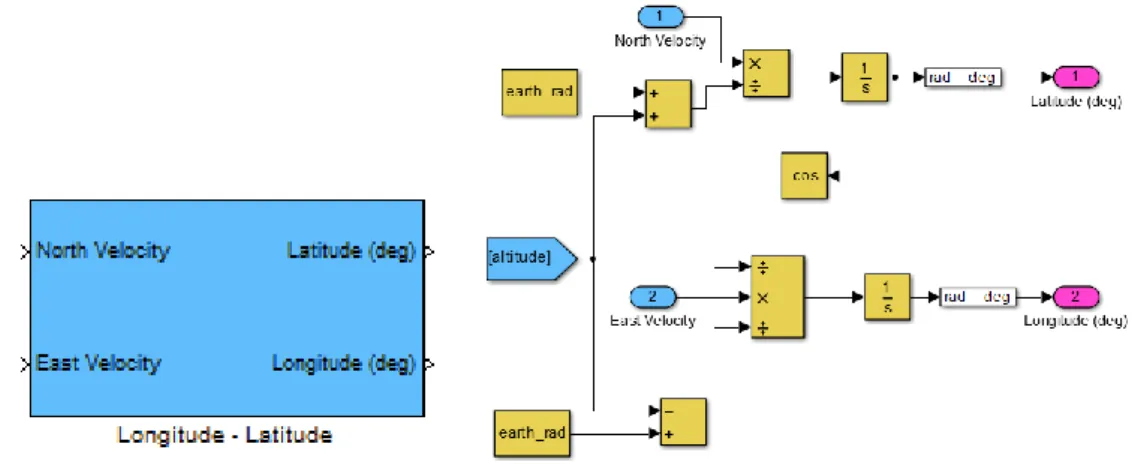
Şekil 54.NED ve Geodetic koordinat sistemleri arasında dönüşüm içinSimulink modeli ... 56
Şekil 55. Simulink FlightGear bloğu ... 57
Şekil 56. Dış dünya modelinin alt rutini ... 58
Şekil 57.Pilotların görüş alanı ... 58
Şekil 58. Görsel gövdenin oluşturulması [60]... 59
xii
Şekil 60. KYS Simülatörü 3B görseli ... 61
Şekil 61. KYS donanımı ... 62
Şekil 62. Kumanda yükleme sistemi kullanıcı arayüzü ... 63
Şekil 63.Uçuş modeli ... 64
Şekil 64.Kumanda konum girdisi bloğu... 66
Şekil 65.HeliDyn+ Trim menüsü ... 66
Şekil 66. Uçuş boyunca izlenen enlem - boylam bilgileri ... 69
Şekil 67. Uçuş boyunca üzerinden geçilen arazinin yüksekliği ... 69
Şekil 68. Üzerinden geçilen arazi ile helikopter arasındaki uzaklık ... 70
Şekil 69. Test uçuşu esnasında alınan ekran görüntüsü-1 ... 70
Şekil 70. Test uçuşu esnasında alınan ekran görüntüsü-2 ... 71
Şekil 71. Yunuslama kanalının ileri yönelimde kuvvet-tork-pozisyon grafiği ... 72
Şekil 72. Uygulanan kuvvetin değiştirilmesi için gerekli parametreler ... 74
Şekil 73. Pozisyon tutma modelinin parametreleri ... 75
Şekil 74. Yunuslama kanalı kuvvet uyarlama parametrelerinin etkisi ... 76
Şekil 75. Yunuslama kanalı kuvvet dönüşüm katsayısının etkisi ... 77
Şekil 76.Yunuslama kanalı-Trim ortada durumunda alınan ölçüm ... 79
Şekil 77. Yunuslama kanalı-Trim ND durumunda alınan ölçüm ... 80
Şekil 78. Yunuslama kanalı-Trim NU durumunda alınan ölçüm ... 80
Şekil 79. Yunuslama kanalı-Trim serbest durumunda alınan ölçüm ... 81
Şekil 80. Yunuslama kanalı-A/P hidrolik durumunda alınan ölçüm ... 81
Şekil 81. Yunuslama kanalı-tüm hidrolik kapalı durumunda alınan ölçüm... 82
Şekil 82. Yuvarlanma kanalı-Trim ortada durumunda alınan ölçüm ... 83
Şekil 83. Yuvarlanma kanalı-Trim LWD durumunda alınan ölçüm... 83
Şekil 84. Yuvarlanma kanalı-Trim LWD durumunda alınan ölçüm... 84
Şekil 85. Yuvarlanma kanalı-Trim serbest durumunda alınan ölçüm... 84
Şekil 86. Yuvarlanma kanalı-A/P hidrolik kapalı durumunda alınan ölçüm ... 85
Şekil 87. Yuvarlanma kanalı-tüm hidrolik kapalı durumunda alınan ölçüm ... 85
Şekil 88. Pedal Kanalı, trim ortada durumunda alınan ölçüm ... 86
Şekil 89. Pedal Kanalı, AP hidrolik ortada durumunda alınan ölçüm ... 87
Şekil 90: Pedal Kanalı, tüm hidrolik kapalı durumunda alınan ölçüm ... 87
xiii
Şekil 92: Kolektif Kanalı, AP hidrolik durumunda alınan ölçüm ... 89 Şekil 93. Kolektif Kanalı, tüm hidrolik on/off durumunda alınan ölçüm ... 89 Şekil 94 Uçuş testi fotoğrafı ... 90
xiv
KISALTMALAR
Kısaltmalar Açıklama A/P Autopilot
AFCS Otomatik uçuş kontrol sistemi CoE CANopen over Ethernet DLL Dynamic Link Library
EASA European Aviation Safety Agency ENI EtherCAT ağ bilgisi
ESI EtherCAT Slave Info
EtherCAT Ethernet for Control Automation Technology FAA Federal Aviation Administration
FFS Tam Uçuş Simülatörü
FoV Görüş alanı (Field of View) FPS Uçuş rotası stabilizasyonu FSTD Flight Simulation Training Devices FTD Uçuş Eğitim Cihazı
HAT Hava aracının yerden yüksekliği KSM Kumanda Simülasyon Modeli KYS Kumanda Yükleme Sistemi LWD Sol kanat aşağıda
ND Burun aşağıda
NU Burun yukarıda
RWD Sağ kanat aşağıda
1
1. GİRİŞ
Simülatörler deniz, kara ve hava araçlarını ve alt sistemlerini sanal ortamda gerçekleyerek kullanıcıya eğitim vermek amacıyla kullanılan sistemlerdir. Simülatörler ticari bir ürün olarak askeri ve sivil alanda yaygın bir biçimde kullanılmaktadır.
Uçuş simülasyonları hava aracının yerdeki ve uçuş esnasındaki davranışını sanal ortamda gerçekleştirir [1]. Hava aracının etkisi altında kaldığı dış ortam ve aerodinamik koşulların hesaplandığı matematiksel modelin, kullanıcı ile etkileşimli olarak gerçek zamanlı simülasyonu gerçekleştirilir.
Uçuş simülatörleri, uçak veya helikopterlerin, hava ve arazi koşullarının sanal gerçeklik kullanılarak simüle edildiği, pilot eğitiminde kullanılan, askeri ve sivil amaçlı kullanılan sistemlerdir. Bu sistemler, pilot eğitimi haricinde, yeni hava araçlarının ve hava aracı ekipmanlarının geliştirme sürecinde de sanal prototipleme ortamı olarak kullanılmaktadır.
Uçuş simülatörü alanında araştırmalar ve ürün geliştirme çalışmaları üniversiteler [2, 3, 4] ve sanayi kuruluşlarında [5, 6, 7, 8, 9, 10] devam etmektedir. Delft Üniversitesinin geliştirdiği uçuş simülatörü Şekil 1’de verilmiştir.
2
Üniversitelerin uçuş simülatörleri üzerine yaptıkları çalışmalar, pilot eğitimi için tam görev simülatörleri [11], mühendislerin prototip deneme amaçlı kullandığı mühendislik simülatörleri [4,12, 13] ve daha yenicilikçi simülatör tasarımları geliştirmeye [14] yönelmiştir. Örneğin, pilot kabini hareketinin bir endüstriyel robot kol yardımıyla taklit edildiği simülatörde pilot kabininin hareket limitleri artırılmıştır (Şekil 2).
Şekil 2.Pilot kabininin robot koluna bağlandığı uçuş simülatörü [14]
Simülatörlerin çok geniş bir kullanıcı kitlesi ve sistem çeşitliliği bulunmaktadır. Bir uçta, kullanıcıya sadece görsel ve işitsel tepki veren basit sistemler bulunurken; diğer uçta ise gerçek kokpit kumanda ve göstergelerinin kullanıldığı, altı serbestlik derecesinde hareket edebilen, gerçekçi uçuş deneyiminin yaşanabileceği karmaşık sistemler yer alır [15].
Simülatörler, gerçekçilik seviyelerine göre ABD’nin “Federal Aviation Administration” (FAA) ve Avrupa’nın “European Aviation Safety Agency” (EASA) kurumlarınca sınıflandırılmıştır [16]. FAA standartlarına göre pilot eğitimleri için kullanılacak olan tam görev uçuş simülatörlerinde uçuş göstergeleri, görsel sistem, hareket sistemi, ses sistemi ve kumanda yükleme sistemi gibi alt sistemler bulunmalıdır (Şekil 3). Helikopter ve uçak tam görev simülatörleri aynı alt sistemlere sahiptirler. Uçuş göstergeleri pilota hava aracının uçuş durumu ile ilgili görsel bilgi verir. Görsel sistem, uçuşun gerçekleştirildiği dış dünya görsel modelini içerir. Hareket sistemi, pilot kabinini hava aracının uçuş açısına göre hareket ettirir. Ses
3
sistemi, uçuş esnasında meydana gelen sesleri oluşturur. Kumanda yükleme sistemi (KYS), pilotlara kuvvet tepkisi uygulayarak uçuşun dokunsal algı yoluyla hissedilmesini sağlar. Bu alt sistemlerin birbirleri ile veri alışverişini bir ana bilgisayar kontrol eder.
Şekil 3.Tam görev simülatörü alt sistemleri
1.1. Amaç ve Kapsam
Bu çalışmanın amacı helikopter uçuş simülatörleri için herhangi bir helikopterlere uyarlanabilir yapıda bir Kumanda Yükleme Sistemi (KYS) geliştirmektir. Geliştirilen KYS’nin, en üst standart olan ‘müşterek havacılık gereksinimleri uçuş simülatörleri ve eğitim cihazları sertifikasyonu (JAR FSTD) seviye D’ sınıfı simülatörlerde alt sistem olarak kullanılması hedeflenmektedir.
Helikopter KYS’lerinde dört eksen bulunur ve bu eksenlere bağlı motorlar sayesinde pilota kuvvet geri beslemesi sağlanır. KYS’nin her bir ekseni, iç içe iki çevrimden oluşan kademeli bir kontrol sistemi ile kontrol edilir. Temel olarak dış çevrim pilot tarafından hissedilmesi gereken kuvveti hesaplar, iç çevrim ise bu kuvveti oluşturmak için gereken referansı motora gönderir.
KYS’nin doğrulanması ve sanal uçuş yapılabilmesi için hareketsiz bir simülasyon ortamının geliştirilmesi de bu çalışma kapsamındadır. Simülasyon ortamında, uçuş
4
parametrelerinin elde edilmesi için parametrik helikopter matematiksel modeli ve elde edilen parametrelere bağlı görüntünün oluşturulmasını sağlayan bir görüntü üreteci bulunmaktadır.
Uyarlanabilir yapıda olan KYS’nin doğrulanması aşamasında Türk Silahlı Kuvvetleri envanterinde bulunan Cougar AS 532 helikopterinin (Şekil 4) verileri temel alınmıştır.
Şekil 4. Cougar AS532 fotoğrafı [18]
Tezin içeriğinde; 1. bölümde uçuş simülatörleri ve alt sistemleri özetlenmiş ve tez içeriği ve kapsamına dair kısa bilgi verilmiştir. Kumanda yükleme sistem ile ilgili yapılmış çalışmalar ise 2. bölümde yer almaktadır. Kumanda kolunun pilot tarafından hareket ettirilebilmesi için gerekli kuvvetin ölçümü ve modellenmesi 3. bölümde anlatılmaktadır. Kumanda yükleme sisteminin donanımsal ve yazılımsal tasarımı 4.bölümde yer alır. Uçuş modelini oluşturan helikopter matematiksel modeli ve dış dünya modeli ise 5. bölümde anlatılmaktadır. Entegrasyonlar ve doğrulama testleri ise sırasıyla 6. ve 7. bölümde yer almaktadır.
5
2. Uçuş Simülatörleri için Kumanda Yükleme Sistemleri
Kokpit kumandaları, hava aracının ve kontrol yüzeylerinin durumuna göre pilotlara kuvvet tepkileri uygulayarak uçuşun dokunsal algı yoluyla hissedilmesini sağlar. Kuvvet tepkileri, aerodinamik etkilerin yanında hava aracının içindeki mekanik ve hidrolik bağlantıların atalet, sönümleme ve sürtünme özelliklerinden de etkilenir. Hava araçlarının kumanda sistemleri tersinir (reversible) ve tersinmez (irreversible) olmak üzere ikiye ayrılır [15]. Tersinmez sistemlerde, yerdeki ve uçuş esnasında kumanda uzuvlarında hissedilen kuvvetler aynıdır. Bu kuvvetler, tersinir sistemlerin aksine, uçuş koşullarına değişmemektedir. Gelişmiş uçuş simülatörlerinin alt sistemlerinden biri olan KYS, kumanda tepkilerini model tabanlı üreterek gerçekçi simülasyon ortamı oluşmasına katkıda bulunur [2, 4, 11].
Şekil 5.Kumanda Yükleme Sistemi şeması
KYS bir adet dış çevrim ve kumanda ekseni adedi kadar iç çevrimden oluşan iki aşamalı bir kontrol yapısıdır [19] (Şekil 5). Dış çevrimde; kumanda tepki kuvvetlerine etki eden destekleyici ve engelleyici bileşenler ile hava aracının içindeki mekanik ve hidrolik bağlantıların dinamik modellerinden oluşan Kumanda Simülasyon Modeli (KSM) bulunur. Her bir İç çevrim, kumanda uzvuna pilot tarafından uygulanan anlık kuvvet ile dış çevrimde hesaplanan anlık tepki kuvvetinin farkı doğrultusunda çalışan servo çevrimidir. KYS tasarımının farklı helikopterlerin simülasyonuna ve farklı simülatörler modellerine rahatça uyarlanabilecek şekilde modüler yapıda olması önem taşımaktadır [20]. KYS’nin gerçekçilik derecesi uçuş simülatörünün sınıflandırmasına etki eder. Ölçüm ve karşılaştırma yöntemleri ilgili sınıflandırma kılavuzunda tarif edilir [16].
6
2.1. Kontrol Sistemi
Kumanda yükleme sistemindeki en önemli unsur kumanda uzvunda hissedilecek kuvveti yüksek doğrulukta simüle etmektir. Yükleme görece eski sistemlerde hidrolik eyleyicilerle [21, 22], modern sistemlerde ise düşük hızlarda yüksek tork üretebilen elektrik motorlarıyla[23-28] yapılmaktadır.
Hidrolik eyleyiciler kullanılarak yapılan KYS’lerde [21, 22], iç çevriminden kaynaklanan düzensiz kuvvetleri engellemek için hız kontrolcüsü ve ters model gözleyicisi kullanmıştır. İç çevrim modelinin düzensiz kuvvetleri %20 oranında azalttığını yapılan deneyler ile göstermiştir. İç çevrimde konum kontrolü kullanılarak yapılan çalışmada [21] açık çevrim transfer fonksiyonu kullanılarak iç çevrim modeli geliştirilmiştir. Bu model, dış çevrim çıktısı olan konum referans değerini kuvvet ölçümüne bağlı olarak kontrol etmektedir. Dış çevrim çıktıları ana bilgisayarda aerodinamik model tarafından kontrol yüzeyleri değişimine bağlı olarak hesaplanmaktadır. Eyleyicilerin hareket ettirdiği mekanik sistemin ağırlığı ile birlikte kuvvet kararsızlığının arttığı gözlenmiştir. Geliştirilen sistemin genel şeması Şekil 6’da verilmiştir.
Şekil 6.Hidrolik eyleyicili KYS yapısı [21]
Üç kanallı ve hidrolik eyleyiciler kullanılarak olarak geliştirilen KYS’de [19] her bir kanala ait kuvvetler dış çevrim bilgisayarında çalışan matematiksel model tarafından
7
hesaplanır. Dış çevrim bilgisayarı, ana bilgisayardan uçuş parametrelerini girdi olarak almaktadır. Sistemin kontrolcü diyagramı Şekil 7’de verilmiştir.
Şekil 7. Kontrolcü Diyagramı ([19]’dan tercüme edildi)
Hidrolik eyleyicilerin üreteceği kuvvet, dış çevrimdeki matematiksel modelin çıktısıdır. Pilot kumandalarının konumuna göre pilotun hissetmesi gereken kuvvet hesaplanır denklem (2.1) ile hesaplanır.
(2.1)
Aerodinamik kuvvet
(2.2)
Denklemdeki dümen ile pilot manevrası arasındaki aktarım oranını, dümenin
aerodinamik eklem momentini ve ise yardımcı kumanda yüzeyinin aerodinamik eklem momentini ifade etmektedir.
Ataletsel kuvvet
8
Denklemdeki ve ölçek katsayıları, yönetilen açısal hız ve aşırı yüklemeyi ifade etmektedir.
Viskoz sürtünme kuvveti
(2.4)
Viskoz sürtünme kuvveti denklemindeki viskoz sönümleme katsayısına, ise eyleyicinin konum bilgisine karşılık gelmektedir.
Kuru sürtünme kuvveti , hızın işaretine ve sürtünme katsayısına bağlı bir sabittir. Yay kuvveti ,
(2.5)
, yay sabitine karşılık gelirken, eyleyicinin konumunu ifade etmektedir. Durdurma kuvveti , eyleyici en uç noktaya geldiğinde etkin hale gelmektedir. Dış çevrimde hesaplanan kuvvetin eyleyiciler tarafından gerçekleştirilmesi için iç çevrimde kuvvet [27], hız [17] ve konum [26] kontrolü yöntemleri kullanılmıştır. Gerretsen ve ark. [17] iç çevrimde kuvvet, hız ve konum kontrol yöntemlerini karşılaştırmalı olarak incelemiştir. Konum çevrimine ait blok diyagramında (Şekil 8(a)), hidrolik eyleyici giriş sinyali, mevcut konum ve istenilen konum arasındaki farktır. Hız çevrimine ait blok diyagramında (Şekil 8(b)), simülasyon modeline göre belirlenen hız, uygulanan kuvvete ve kontrol uzuvunun konumuna bağlı olarak hesaplanır. Kuvvet çevrimine ait blok diyagramında (Şekil 8(c)) ise hidrolik eyleyici giriş sinyali, uygulanan ve simüle edilen kuvvetler arasındaki farktır. Bilgisayar simülasyonlarında kuvvet çevriminin başarılı sonuçları verdiği görülmüştür. Fakat hidrolik eyleyici kullanarak yapılan deneylerde hız çevrimi daha başarılı olmuştur. Konum kontrol yönteminin bazı durumlarda kararsız davrandığı için kumanda yükleme sistemi için uygun bir kontrol yöntemi olmadığı belirtilmiştir.
9 (a)
(b)
(c)
10
Lan Vu ve Thamm yaptıkları çalışmada [29] hidrolik eyleyicilerin lineer olmayan davranışlarına rağmen Uçuş Hareket Taklitçisinden (FMS) en ideal dinamik başarımın elde edilmesi için gereken özellikleri öne sürmüşlerdir. Kontrolcü yapısını oluşturmak için yer değiştirme geri beslemeli, yer değiştirme ve diferansiyel geri besleme çevrimli ve yer değiştirme, diferansiyel basınç ve oransal geri beslemeli kontrol yapılarını incelemişlerdir. Şekil 9’da yer değiştirme, diferansiyel basınç, oransal geri besleme ve oransal ileri beslemeli kontrol yapısı gösterilmektedir. Bu kontrol yapısı ile lineer olmayan davranışlar dengelenmiştir.
Şekil 9. Yer değiştirme, diferansiyel basınç ve oransal geri beslemeli kontrol yapısı [29]
Younsu’nun yaptığı araştırmada [30] sadece yunuslama ekseni için iki adet hidrolik eyleyici kullanılarak, uçak kontrol yüzeylerinin ataletlerini simüle edebilmek için kumanda yükleme sistemi geliştirmiştir (Şekil 10). Eyleyicilerden uygulanan fiili yük değeri, gerçek zamanlı uçuş mekaniği bilgisayarından gelmektedir. Hava aracı uçuş dinamiği ve eklem momenti verilen uçuş durumuna bağlı olarak nümerik olarak çözülür. Bu kapsamda dinamik yükleme simülatörü için iki farklı matematik model geliştirilmiştir. İlk modelde kontrol yüzeylerinin tüm dinamiği modellenmiştir. İkinci modelde ise sadece mekanik özellikler modellenmiştir. Hazırlanan test düzeneğinde iki model de değerlendirilmiş ve kontrol yüzeylerinin modeli ile yapılan testlerde sistemin daha kararlı davrandığı görülmüştür.
11
Şekil 10. Dinamik yük simülatörü şematiği [30]
Donanım olarak KYS’lere bakıldığında iç ve dış çevrimin yazılımları için bir adet bilgisayar ile dijital ve analog verilerin toplanması için veri toplama kartları kullanılmıştır.
Verilen görevin istenilen süre içerisinde yapılmasını gerçek zamanlı işletim sistemleri garanti eder. Normal işletim sistemlerinde yapılan görevlerin öncelikleri ayarlanamamakta ve istenilen sürede verilen görevin yapılması sağlanamamaktadır. KYS de yapılan matematiksel işlemlerin yüksek doğrulukta hesaplanabilmesi için 2 kHz den yüksek frekanslarda çalışması gerekmektedir [16]. Bu frekanslara ulaşmak için gerçek zamanlı işletim sistemlerine ihtiyaç duyulmaktadır. Gerçek zamanlı işletim sistemi olarak Vxworks [24,26] ve rTx[5], Scale-RT [16], RT-Lab [31] gibi Linux tabanlı sistemler kullanılmıştır. Mathworks MATLAB tabanlı [32] çalışmalar da vardır. Bazı ticari sistemlerde Windows CE gerçek zamanlı işletim sisteminden yararlanılmıştır.
12
2.2. Mekanik Tasarım
Kumanda yükleme sisteminin mekanik aksamı eyleyiciler ile pilot kumandaları (saykılık, pedal ve kolektif) arasındaki bağlantıları içerir. Helikopter kumanda yükleme sisteminin dört ekseni (kanalı) vardır. Bunlar yunuslama, yuvarlanama, pedal ve kolektiftir. Her eksende bir adet eyleyici bulunur.
Eyleyici tarafından üretilen kuvveti pilota ileten mekanik aksam, eyleyicinin üretebildiği en yüksek kuvvete dayanmalı, atalet ve sürtünme kuvvetleri minimum olacak şekilde tasarımlanmalıdır.
Mekanik yönünden incelendiğinde kumanda yükleme sistemi tasarımında iki temel konsept vardır. Pilot kumandalarının eyleyicilere bağlanma şekline göre farklılık gösteren modüler ve eklemli KYS konseptleri aşağıdaki bölümlerde detaylandırılmıştır.
2.2.1. Modüler Kumanda Yükleme Sistemleri
Modüler KYS’lerde pilot kumandaları eyleyicilere doğrudan bağlanır. Genellikle küçük boyutlu elektrik motorları tercih edilir. Bu motorlardan yüksek tork elde edebilmek için dişli kutuları kullanılır.Pilot hissiyatının etkilenmemesi için dişli kutularındaki boşluk minimum olmalıdır (örn. <8 arcmin).Çoğunlukla tek pilotlu simülatörlerde kullanılan bu sistemler, oldukça kompakt ve basit yapıdadırlar. Wittenstein firmasının geliştirdiği bu tarz bir KYS Şekil 11’de verilmiştir.
13
Pilot ve yardımcı pilotun olduğu simülatörlerde her pilot için ayrı bir sisteme ihtiyaç olduğundan sekiz kanallı KYS gerekmektedir. Bu nedenle toplam maliyet yüksektir. Pilotlar arasındaki senkronizasyonun elektronik olarak sağlanması da güvenilirliği azaltmaktadır. Almanya Havacılık Merkezinin (DLR) Eurocopter EC135 helikopteri için geliştirdiği ve modüler KYS’nin kullanıldığı sekiz kanallı kumanda yükleme sisteminde her iki pilotun eş zamanlı bir şekilde kumanda kolu, pedal ve kolektiflerde kontrol kuvvetlerini hissetmeleri sağlanmıştır [34].
Modüler kumanda yükleme sistemlerinin bir alt kümesi olan ve uçak simülatörlerinde kullanılan manevra kolu (sidestick), bilgisayar oyun kolu benzeri iki eksenli yapıdadır. Lin ve ark. [35] sanal gerçeklik tabanlı uygulamalar için haptik cihaz olarak tanımlanabilecek, kuvvet geri beslemeli, bir manevra kolu mekanizması tasarladıkları çalışmada, yük sensörü ve 2500 adım enkoderli servo motorlar kullanmışlardır. Şekil 12’de kuvvet geri beslemeli kumanda kolu tasarımına ait CAD modeli, eksen hareketleri ve ilgili birim vektörler ve kolun hareketinin sınırlandığı iş uzayı ve uzaya ait denklemlerde kullanılan değişkenler gösterilmiştir [36].
(a) Modifiye
mekanizma (b) Eksen hareketleri (c) İş Uzayı
Şekil 12. (a) Kuvvet geri beslemeli kumanda kolu ve (b, c)çalışma uzayı [36]
Hermans’ın yaptığı çalışmada [37], iki adet 10 Nm tork üretebilen servo motor ve dişli kutuları yardımıyla iki eksen birbirinden bağımsız hareket edebilmektedir. Her iki kanalda +/- 17 derece hareket limiti vardır (Şekil 13).
14
Şekil 13.Kumanda kolu tasarımı [37]
2.2.2. Eklemli Kumanda Yükleme Sistemleri
Eklemli sistemlerde pilot kumandaları ile motorlar birbirinden uzakta bulunur ve güç iletimi eklemlenmiş bağlar ile sağlanır. İki pilotlu simülatörlerde, pilotlar arasındaki bağlantının gerçek helikopterden aynen kopyalanmasına olanak sağladığı için, tercih edilir [19]. Eklemli sistemlerde motor tarafından harekete geçirilen aksamın ataleti ve sürtünme kuvvetleri daha fazladır. Bunun yanı sıra kullanılan bağlantı elemanları arasında boşluk olmaması gerekir. Sistemin tasarımı modüler sisteme göre daha zordur.
15
Preotoni ve ark. [19] yaptığı uçuş mekaniği simülatörü için AgustaWesland firması ile beraber çalışarak iki pilotlu uçuş simülatörü geliştirmiş ve dört kanallı kontrol yükleme sisteminde kuvvet geri beslemeli 100 Nm nominal güç üretebilen tork motorları (ECoL 8000 Q-Line) kullanmışlardır (Şekil 14). Motor şaftı ± 40 hareket bandında maksimum 100 rpm hız ile tork üretmektedir. Pilota uygulanan kuvveti ölçmek için kullanılan yük hücresi ise motor şaftına bağlanan ekleme entegre edilmiştir.
Şekil 15. XV-15 simülatörü kontrol yükleme sistemi
Pennsilvanya devlet üniversitesinde kullanılan XV-15 simülatöründe dört kanallı KYS kullanılmaktadır (Şekil 15). Geliştirilen mekanizma motorun döner hareketi doğrusal hareketi çevrilir ve eklemleri doğrusal olarak hareket ettirir [38]. Yüksek hızlı servo motor (1000rpm) şaftına bağlanan bilyeli vida ve eklemler ile pilotlara kuvvet geri beslemesi yapılır. Hareket iletiminin doğrusallığını sağlamak ve bakım işlemlerini kolaylaştırmak için dört motorda pilot kabininin arkasına yerleştirilmiştir.
16
2.3. Standartlar
Flight Simulation Training Devices (FSTD -Uçuş Simülasyonu Eğitim Cihazları) ve Full Flight Simulator (FFS -Tam Uçuş Simülatörü) için belirlenmiş olan JAR FSTD H standardına göre derecelendirilen uçuş simülatörleri, sahip oldukları özelliklere göre B,C veya en üst derece olan D sınıfı olarak nitelendirilir.
JAR FSTD H standardı, JAR-STD 1H Helikopter Uçuş Simülatörleri, JAR-STD 2H Helikopter Uçuş Eğitim Cihazları ve JAR-STD 3H Helikopter Uçuş Simülatörleri standartları birleştirilerek oluşturulmuştur [16]. Standardın son güncellemesi 1 Ağustos 2008 tarihinde yapılmıştır. Bu tarihten itibaren 1H, 2H ve 3H standartları yürürlükten kaldırılmıştır.
En yüksek standart olan JAR-FSTD H seviye D standardına uygun olarak tam görev uçuş simülatörü geliştirilmesi, standartların çok yüksek olmasından dolayı zorlayıcı bir konudur [39,40]. Tam uçuş simülatörlerinde kullanılmak üzere KYS geliştirmek için yapılan çalışmalarda çoğunlukla helikopter üreticilerinden doğrudan destek alınmıştır [11, 19, 39, 41].
Standartlarda simülatörün tüm alt sistemleri için toleranslar tanımlanmıştır. JAR FSTD H seviye D standardına sahip bir helikopter simülatörünün kumanda yükleme sisteminin sahip olması gereken özellikler aşağıda listelenmiştir.
Uçuş sırasında meydana gelen hava aerodinamik şartların etkisi modellenmelidir.
Kumanda kuvvetleri ve ilgili yer değiştirme miktarları ile kumanda sistemlerinin serbest tepkileri simüle edilen helikopterin uçuş sırasındaki tepkileri ile aynı olmalıdır.
Kumanda kollarının pozisyona bağlı olarak değişen kuvvet tepkileri aynı olmalıdır.
Kumanda kolunun dinamik tepkileri aynı olmalıdır.
Donanım ve yazılımlar kendi kendilerini sınama özelliği barındırmalıdır. Dış çevrim modeli, helikopterin zeminde iken alınan kuvvet pozisyon ölçüm
17
Kumanda yükleme sistemi modeli gerçek helikopterin uçuş kontrol sistemi gibi her kumanda arasındaki tüm mekanik etkileşimleri içerecektir.
Kumanda yükleme sistemi ana bilgisayardan yazılım ara yüzü kullanılarak etkinleştirilme ve devre dışı bırakma yeteneğine sahip olmalıdır.
Kumanda yükleme sistemi ana bilgisayar ile ethernet üzerinden en az 60 Hz’de iletişim içerisinde olmalıdır.
Kumanda yükleme sisteminin gerçeklediği kuvvetler gerçek helikopterin ilgili kuvvetleri ile %±10toleransı bandında olmalıdır.
Simülatörde bulunacak olan kumanda uzuvları (saykılık, pedal ve kolektif) helikopterin kumandalarının hareket limitlerini aşmayacak şekilde hareket edebilmelidir.
Kumanda yükleme sistemi bilgisayarı gerçek zamanlı bir işletim sistemine sahip olmalıdır.
Kumanda yükleme sistemi kumanda kolları (saykılık ve kolektif) üzerinde bulunan trim anahtarlarına (switch) bağlı olarak kuvvet, pozisyon değerlerinin değişimlerini helikopterden alınan ölçümlere uygun olarak gerçeklemelidir.
Pilotun dokunsal algısı ve görüşleri JAR standartlarına göre kabul testlerinde oldukça önemlidir [11]. KYS’de pilot, kuvvet algısı konusunda olumlu görüş belirtene kadar sistemin ince ayar (tuning) işlemleri devam eder (Şekil 16).
18
Şekil 16. Pilot görüşüne dayalı ince ayar işleminin akış diyagramı [42]
FAA standardına uygun uçuş simülatörü geliştirilmesi için analitik ve deneysel modelleme araçlarının kullanılmasına ve birbirine bağlı deney serileri gerçekleştirilmesine dayanan yaklaşımlar kullanılmaktadır [42]. Uçuş simülatörü doğruluğunu kanıtlamak için hava aracından ve simülatörden ilgili standartlarda belirtilen durumlarda ölçümler alınır. İlgili standartta belirtilen tolerans limitleri dahilinde alınan ölçümlerin doğrulaması gerçekleştirilene kadar simülatör modeli üzerinde ince ayar (tuning) işlemleri devam eder.
19
3. KUMANDA KUVVETLERİNİN ÖLÇÜMÜ VE MODELLENMESİ
Kumanda yükleme sisteminin dış çevrimi, kumanda uzuvlarının konumlarına göre pilotun uygulaması gereken kuvvetleri hesaplayarak, gerçek helikopterin mekanik kumanda sistemini simüle eden Kumanda Simülasyon Modeli’ni (KSM) içerir. KSM, farklı helikopter modellerine uyarlanabilmesi için modüler ve parametrik bir yapıda olmalıdır. Pilotun kumanda kollarını hareket ettirebilmek uygulaması gereken kuvvetlerin ölçümü ve ölçülen kuvvetlerin KSM’de kullanılmak üzere modellenmesi bu bölümde anlatılmıştır.
3.1. Mekanik Kumanda Sistemi
Mekanik kumanda sistemi, temel olarak, helikopterin istenildiği gibi hareket ettirilmesini sağlayan sistemdir. Pilot kumandalarından alınan girdiler ana rotora ve kuyruk rotoruna mekanik bağlantı çubukları ve pilota yardımcı kuvvet oluşturan servolar ile iletilir.
Kumanda sistemi yuvarlanma, yunuslama, kolektif ve pedal alt sistemlerinden oluşur (Şekil 17). İki pilotlu helikopterlerde pilot ve yardımcı pilotun saykılık çubuğu, kolektif ve pedaldan oluşan kumandaları, birbirleri ile mekanik olarak bağlantılıdır. Pilotların uyguladığı kumanda girdileri mekanik bağlantı çubukları ve hidrolik eyleyiciler ile rotor pallerine iletilerek helikopter hareket ettirilir. Pilot girdilerine destek olmak için kararlılığı arttırma sistemi (SAS-Stability Augmentation System), uçuş rotası stabilizasyonu (FPS – Flight Path Stabilization), güçlendirme servoları ve trim servoları kullanılır. Kumanda sistemi manüel olarak pilot ve yardımcı pilot tarafından veya otomatik uçuş kontrol sistemi (AFCS – Automatic Flight Control System) tarafından çalıştırılabilir [43].
Güçlendirme servoları pilot kumandaları ile karıştırıcı ünite arasında yer alır ve kumanda kollarına gelen kuvvetleri azaltır. Güçlendirici servolar çalıştığı durumda pilot kumandalarına kuvvet geri beslemesi olmaz. Çalışmadığı durumda ise tüm kuvvetler mekanik bağlantılar ile pilot kumandalarına iletilir.
20
Şekil 17. Mekanik kumanda sistemi [44]
Karıştırıcı ünite (mixing unit) kumanda girdilerini mekanik olarak birleştirir ve rotor servolarının doğru hareket etmesini sağlar (Şekil 18). Kumanda sisteminde karıştırıcı ünitenin dört adet görevi bulunmaktadır:
Kolektif ve yunuslama kanalarından gelen değişikliklerin neden olduğu rotor aşağı hava akımının(downwash) etkilerini dengeler.
Kolektif girdisinin değişiminden kaynaklanan tork etkisini dengeler. Kolektif girdisi artığında kuyruk rotoru yunuslaması artar, kolektif azaldığında da azalır.
Kuyruk rotoru itkisinin değişiminin neden olduğu yuvarlanma momentini dengeler.
Kolektif girdisi azaltıldığında sol yanal eksene ana rotor girdisi, kolektif girdisi artırıldığında ise sağ yanal eksen için rotor girdisi sağlanır.
21
Kuyruk rotoru yunuslamadan kaynaklanan dik kuvvet bileşenlerini dengeler. Kuyruk rotoru yunuslaması arttığından ana rotora ileriye doğru girdi, azaldığında ise ana rotor geriye doğru girdi gönderir.
Şekil 18. Kumanda sistemi diyagramı [43]
Karıştırıcı ünitenin çıkışında sağ, sol, ileri ve kuyruk kanalı olmak üzere dört adet hidrolik servo bulunur. Sağ, sol ve ileri kanalları ana rotor pallerini, kuyruk kanalı ise kuyruk rotorunun pallerini hareket ettirir. Helikopter kumanda sisteminin diyagramı Şekil 18’de verilmiştir.
22
3.2. Kumanda Simülasyon Modeli Kuvvetlerinin Hesaplaması
Kumanda sistemleri tersinir ve tersinmez olarak iki gruba ayrılır. Tersinmez kumanda sistemlerinde kontrol yüzeylerindeki aerodinamik kuvvetler pilotlar tarafından hissedilmediği için kuvvet hissi yerde ve uçuş esnasında aynıdır. Helikopterlerin neredeyse hepsi tersinmez kumanda sistemine sahiptir [15]. Dolayısıyla kumanda kuvvetlerinin ölçümü ve doğrulanması yerdeki helikopter üzerinde yapılabilir.
Kumanda Simülasyon Modeli (KSM) kuvvetlerinin hesaplanmasında teorik ve deneysel yöntemler kullanılabilir. KSM’nin teorik olarak hesaplanabilmesi için tüm kumanda sisteminin atalet, sürtünme, sönümleme, aktarma oranı gibi parametrelerine ihtiyaç vardır. Bu parametreler askeri veya ticari gizlilikten dolayı ancak helikopter üretici firması ile ortak çalışarak elde edilebilecek bilgilerdir [23].
Deneysel yöntemde, helikopter kumandaları üzerinden kuvvet ölçümleri alınabilir. Bu kuvvetler temel olarak kablolar, bağlantı çubukları, rulmanlar gibi elemanlar arasındaki sürtünme kuvvetleri, yay kuvvetleri, iki yay arası koparma kuvvetleri ve hidrolik sistemlerin kuvvetlerinden oluşmaktadır.
Kumanda kuvvetlerinin ölçümü için özel tasarım kuvvet ölçüm sistemleri kullanılır. Kuvvet ölçüm sisteminde;
Saykılık ve pedaldan kuvvet ölçümü almak için 0.01N hassasiyetli, ± 1100 N maksimum kapasiteli yük hücresi,
Pedal kanalından ölçüm almak için tek yönlü (basma kuvveti) 0.1N hassasiyetli, 1500 N maksimum kapasiteli yük hücresi (sol ve sağ pedal için 2 adet)
USB data toplama ünitesi, 100 Hz de data alınmaktadır.
Üç eksen atalet ölçer (3DM-GX3: 100 Hz frekans, ± 0.35 doğruluk)
Yük hücrelerinin ve atalet ölçerin kanallara bağlamak için kullanılan mekanik aparatlar,
23
Bulunmaktadır. Uygun aparatlar ile ölçüm alınacak kanala, yük hücresi ve atalet ölçer bağlanır (Şekil 19). Helikopter ve simülatörden ölçüm alınırken ölçüm aletlerinin aynı şekilde ve konumda bağlanması gerekmektedir.
Şekil 19. Yük hücresi ve açıölçer ile kuvvet ölçümü
Her bir kanaldan hareket limitleri ve konuma karşılık kuvvet bilgileri alınır. Yük hücresi pilot kabzalarına takılarak hareket limitleri boyunca konuma karşılık kuvvet grafikleri elde edilir. Ölçüm alınırken kumanda sıfır konumundan pozitif hareket limitine, sonra negatif hareket limitine daha sonra da tekrar sıfır konumuna sabit ve yavaş bir hızda hareket ettirilir. Böylece kumanda kolu ileriye ve geriye doğru hareket ederken veriler alınır. İleri ve geri yönde hareket boyunca sürtünme kuvvetleri ve ağırlık kuvveti bileşeninin değişiminden dolayı histerisiz oluşmaktadır. Hareket limitlerine ulaşıldığında mekanik sistemin esnemesinden dolayı küçük yer değişimlerine karşılık yüksek kuvvet değişimi olduğu görülmektedir.
JAR FSTD H FFS D sınıfı standardına göre helikopter üzerinden alınan veriler ile aynı yöntem kullanılarak, simülatör üzerinden alınan veriler karşılaştırılır [16]. Karşılaştırma sonucu maksimum hata %10’un altında olmalıdır.
24
Şekil 20. Örnek kuvvet-konum grafiği
Kuvvet-konum grafiklerinde Şekil 20’de görüldüğü üzere histerisiz vardır. Bunun sebebi sürtünme kuvveti ve atalettir. KSM oluşturulurken hareketin yönü dikkate alınmalıdır. Hareket limitinin sonundaki ani kuvvet artışları kumanda sisteminin esnemesinden kaynaklanmaktadır.
KSM girdileri pozisyon ve yön (ileri veya geri), modelin çıktısı ise kuvvettir. Eksenlerden alınan ölçümler, ileri ve geri yön olmak üzere iki grafik oluşturulur (histerisizden iki ayrı grafik oluşturulur). Yön bilgisine göre uygun grafik seçimi sağlanarak, lineer interpolasyon yöntemi ile mevcut pozisyon için kuvvet değeri hesaplanır. Yunuslama ve yuvarlanma eksenlerinde trim anahtar (switch) değeri de KSM girdisidir.
3.3. Kumanda Kuvvetlerinin Ölçümü
Bu bölümde, helikopter kumandalarından alınan konuma karşı kuvvet ve zamana karşı konum ölçümleri açıklanmıştır.
25
3.3.1. Konuma Karşı Kuvvet Ölçümleri
Kumanda sisteminin anlık kuvvetlerinin modellenebilmesi için trim, hidrolik ve AFCS bileşenlerinin farklı durumlarında konuma karşı kuvvet ölçümleri alınır. Dört kanalda toplam 20 durum için ölçüm alınır. Bu durumlar Tablo 1’de verilmiştir.
‘Trim’ durumu için ölçüm alınırken hidrolik sistem açıktır. ‘Hidrolik’ durumu için sistemle ilgili ölçümler alınırken de trim ortadadır. Her iki durumda da ölçüm alırken AFCS kapalıdır.
Tablo 1. Helikopter kumandalarından konuma karşı kuvvet ölçülen durumlar
YU NU S L AM A TRIM ORTA ND NU Serbest HİDROLİK
A/P Kapalı Açık/Kapalı
YU VA RLAN M A TRIM ORTA LWD RWD Serbest HİDROLİK
A/P Kapalı Açık/Kapalı
KO L E K T İF TRIM ORTA HİDROLİK
A/P Kapalı Açık/Kapalı
PEDAL T RIM ORTA HİDROL İK A/P OFF Orta Yukarı Aşağı Açık/Kapalı
26
Tablo 1 de verilen durumlarda helikopter üzerinden alınan diğer ölçümler Ek 1’de verilmiştir. Yunuslama kanalında trim ortada durumunda alınan ölçüm Şekil 21’de verilmiştir.
Şekil 21. Yuvarlanma Kanalı, trim ortada durumunda alınan konuma karşı kuvvet ölçümü
Yunuslama ve yuvarlanma kanallarında dört adet trim durumu için alınan ölçümler, saykılık üzerinde yer alan trim düğmesi ile pilot kontrolündedir. Pilotlar saykılık üzerinde yer alan trim düğmesine basılı tuttuğunda trim serbest durumunda alınan kuvvetleri hisseder. Pilotun trim düğmesini bıraktığı pozisyon artık sanal sıfır olarak kabul edilir ve saykılık mutlak sıfır yerine sanal sıfır noktasına doğru dinamik davranışını gerçekleştirir. Hidrolik durumlar için alınan ölçümler donanım arızasındaki kuvvetleri temsil eder. Trim durumları arasında geçişleri pilot kontrolündeki, saykılık üzerinde bulunan anahtar (switch) trim ile gerçekleşir. Hidrolik durumlar ise donanım arıza durumunu simüle ettikleri için sadece ana bilgisayar tarafından durumlar arasında geçiş yapılır.
27
3.3.2. Zamana Karşı Konum Ölçümleri
Saykılık eksenleri, yunuslama ve yuvarlama, sıfır konumundan uzaklaştırılıp serbest bırakıldığında sıfır konumu çevresinde sönümlü salınım yaparlar (Şekil 22). Zamana karşı konum ölçümleri kumandaların serbest davranışını gösterir. Bu ölçüm sadece yunuslama ve yuvarlama kanallarından alınır. Pedal ve kolektif, kuvvet uygulanmadığı durumda konumlarını korudukları için bu ölçüme gerek yoktur.
Serbest davranışın doğrulanmasında konumun sıfıra ilk ulaştığı zamandaki hata %10’un altında olmalı, oturma periyot sayısı aynı olmalıdır.
Şekil 22. Yunuslama kanalının zamana karşı konum grafiği
Kuvvet ölçüm sistemindeki atalet ölçer saykılık eksenlerine bağlanır, ölçüm yunuslama ve yuvarlanma kanalı için ayrı ayrı yapılır. İstenilen herhangi bir pozisyona (örn. -3 derece) getirilerek, ölçüm başlatılır ve eksen serbest bırakılarak zamana karşı konum grafiği çizdirilir (Şekil 22).
3.4. Kuvvet Ölçümlerinin Doğrusallaştırılması
Helikopterden alınan ölçümlerden alınan verilerdeki gürültünün giderilerek doğrusallaştırılması gerekir. Küçük konum değişimlerine (<%0.5) ait kuvvet ve
28
pozisyon verileri filtrelenir. Kumanda kolları hareket yönüne göre farklı kuvvet değerlerine sahip olduğu için konum - kuvvet verileri hareket yönüne göre ayrılarak ileri ve geri yön olmak üzere iki farklı veri oluşturulur. Tüm verilerdeki x-ekseni (konum) ve y-ekseninin (kuvvet) pozitif yönde değiştiği kabul edilerek eğimin belirli değere ulaşması durumunda bu konum-kuvvet değerini kırılma noktası olarak belirler. Bu şekil ileri ve geri yön verileri doğrusallaştırılır.
Bu işlem soncunda doğrusal interpolasyon yöntemi ile istenilen konumda kuvvet hesaplanabilir. Konuma karşı kuvvet grafiklerinin tümü doğrusallaştırılarak KSM oluşturulur. Şekil 23’de doğrusallaştırma işlemine bir örnek gösterilmiştir. KSM de kullanılan doğrusallaştırılmış grafiklerin tümü Ek 1 de verilmiştir.
29
4. KUMANDA YÜKLEME SİSTEMİ TASARIMI
Kumanda Yükleme Sistemi tasarımı, donanım bileşenleri ve kontrol sistemi olarak iki gruba ayrılmıştır.
4.1. Donanım Bileşenleri
Bu çalışmada yapılan tasarım Eurocopter firmasına ait Cougar (AS 532) helikopter simülatörü içindir. Bu helikopter iki pilotlu olduğundan eklemli KYS konsepti tercih edilmiştir. Bu bölümde KYS’nin mekanik parçalarının tasarımı ile elektromekanik bileşenlerin seçimi anlatılmıştır.
4.1.1. Mekanik Aksamın Tasarımı
Cougar AS 532 helikopterinin kokpit ölçülerinin baz alındığı, pilot kumandalarının gerçek helikopter ile birebir aynı boyutta ve konumda olduğu bir KYS için ön tasarımlar geliştirilmiştir. Bu tasarımlarda kullanılan motorların ölçüleri benzer bir simülatörden alınmıştır. Şekil 24’de verilen görseller sırasıyla KYS mekanik aksam tasarımının evrimine aittir.
(a) (b) (c)
Şekil 24 KYS ön tasarım evrimi
Başlangıçta tasarım minimum hacim kriterine göre yapılmış ve Şekil 24(a)’daki konsept ortaya çıkmıştır. Ancak, ileride simülatöre eklenmesi muhtemel aviyonik sistemler gibi bileşenler için yeterli yer bulunamaması riski vardır. İkinci tasarımda
30
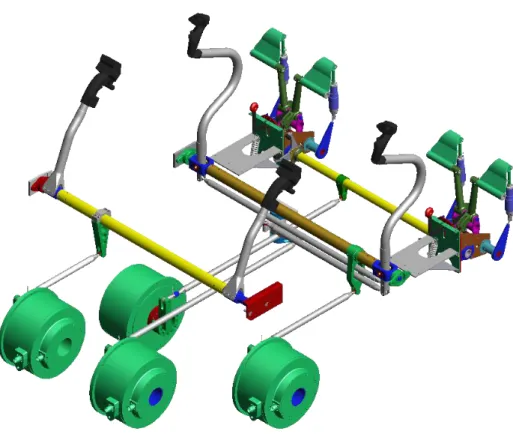
(Şekil 24(b)) pedal ekseni motoru ve bağlantıları ön kısma yerleştirilerek ek komponentlere nispeten yer açılmıştır. Fakat pedal eksenindeki eklem boylarının kısalmasının hareket iletiminin doğrusallığını azalttığı anlaşılmıştır. Şekil 24(c)’de gösterilen tasarımda minimum hacim hedefinden vazgeçilmiş, bağların boyları uzatılarak bütün motorlar sistemin arkasına taşınmıştır. Böylece hem diğer komponentlere yer açılmış, hem de tüm eksenlerdeki doğrusallık arttırılmıştır. Olası bakım işlemleri için sistem bileşenlerine ulaşım diğer tasarımlara göre daha kolaydır. Ön tasarım üzerinde yapılan analizler ve kullanılacak motorun seçiminden sonra tasarım revize edilmiş ve son halini almıştır (Şekil 25). Tanesi 30 kilogramın üzerinde olan motorların tek bir modül üzerinde olmasının montaj ve bakım işlemlerini zorlaştıracağı öngörülmüş ve motor yerleşimleri ikişerli gruplar halinde olacak şekilde değiştirilmiştir.
31
4.1.2. Pilot Kumandaları
Şekil 26.Pilot kumandaları
Pilot kumandaları ve kabzaları (Şekil 26) Cougar AS532 ile tamamen aynıdır. Metal aksam helikopter üzerinden ölçüm alınarak modellenmiş ve üretilmiştir. Saykılık ve kolektif kabzalarının modelleri helikopter üzerinden üç boyutlu tarama yöntemi ile alınarak bilgisayara aktarılmıştır. Her saykılık kabzası üzerinde trim ayarı ve bip trim için bir adet aç/kapa ve bir adet dört yönlü olmak üzere iki adet anahtar (switch) bulunmaktadır. Kolektif kabzalarında anahtar bulunmamaktadır.
4.1.3. Aktarma Oranlarının Hesaplanması
Eklemli kumanda yükleme sistemlerinde bağlantı parçalarının boyutlarından kaynaklanan aktarma oranlarının hesaplanması gerekmektedir. Aktarma oranları pilot kumandalarının konumlarının motor tarafındaki konum sensörleri tarafından doğru algılanması ve pilotun hissetmesi gereken kuvvetin doğru üretilmesi için önemlidir. Diğer taraftan, KYS eksenlerine bağlanacak motorların sahip olması gereken asgari kapasitenin belirlenmesi için aktarma oranlarının bilinmesine ihtiyaç vardır.
32
Şekil 27. Motor bağlantı çubuğu
Motor bağlantısı Şekil 27’de gösterildiği gibidir. Motor miline bağlı moment kolu 100,18 mm’dir, bu değer aşağıdaki aktarma oranı hesaplarına dahil edilmiştir.
Sapma ekseni mekanizmasının ölçüleri Şekil 28’de, aktarma oranı hesabı (4.1)’de verilmiştir.
Şekil 28.Pedal mekanizması
(4.1)
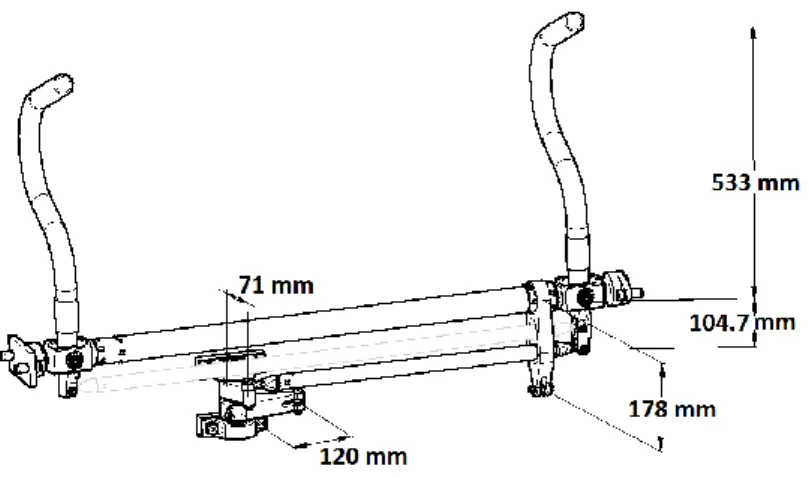
Saykılık kumandasının yunuslama ve yuvarlanma eksenlerinin ölçüleri Şekil 29’de, aktarma oranı hesapları (4.2) ve (4.3)’te verilmiştir. Şekilde gösterilmeyen pilot kabzasının uzunluğu 120 mm hesaplara dahil edilmiştir.
33
Şekil 29. Saykılık mekanizması
Yunuslama:
(4.2)
Yuvarlanma:
(4.3)
Kolektif ekseninin ölçüleri Şekil 30’da, aktarma oranı(4.4)’te verilmiştir. Resimde olmayan pilot kabzasının uzunluğu 120 mm hesaba dâhil edilmiştir.
34
(4.4)
Kumanda kuvvetlerini oluşturabilmek için tork motorları tercih edilmiştir. Motorların tork kapasitesi belirlenirken her eksende karşılaşılabilecek en yüksek kuvvetler baz alınmıştır. Bölüm 3’te açıklanan kuvvet ölçümleriincelendiğinde en yüksek kuvvetlerinhidrolik kapalı durumunda ortaya çıktığıgörülmektedir. Her eksenin hidrolik kapalı durumunda karşılaştığı en yüksek kuvvet değeri yukarıda hesaplanan net moment kolu ile çarpılarak motorun uygulaması gereken sürekli tork değeri elde edilmiştir. Atalet ve sürtünme kuvvetleri hesaplara dahil edilmemiştir. Eksenlerin maksimum kumanda kuvvetleri, aktarma oranları ve karşılık gelen motor torkları Tablo 2’de verilmiştir.
Tablo 2. KYS eksenlerinde maksimum kuvvetler, aktarma oranları ve motor torkları
No Kanal Maksimum Kuvvet(N) Aktarma Oranı, L (m) MaksimumTork (Nm) 1 Sapma 350 0.218 76.3 2 Yunuslama 60 0.367 22.02 3 Yuvarlanma 50 0.370 18.5 4 Kolektif 150 0.310 46.5
En yüksek torka sapma ekseninde ihtiyaç duyulmaktadır. Bu değer 1.3 güvenlik katsayısıyla çarpılarak motorların uygulaması gereken maksimum sürekli tork değeri 100 N.m olarak belirlenmiştir.
4.1.4. Elektromekanik Bileşenlerin Seçimi
Eksenlerin her biri için Parker 300ST2M tork motoru seçilmiştir. Hava soğutmalı olarak kullanılan motorlar 200 rpm hızda 98 N.m tork üretilebilmektedir (Şekil 31). Motorun özellikleri Ek 2’de verilmiştir.
35
Şekil 31. PARKER 300ST2M tork motorunun tork/hız karakteristiği
Motorlar Parker firmasının C3S075 V4 F10 I31 T11M00 kodlu sürücüsü ile sürülmüştür. 8 A nominal akım, 15 A tepe akımı sağlayabilen sürücüler EtherCAT iletişim arayüzüne sahiptir.Sürücü hakkında detaylı bilgi Ek 3’te verilmiştir. Sürücükonum, hız veya tork kontrolüne olanak sağlamaktadır.Sinyal akış diyagramı Ek 4‘de verilmiştir.
Kumanda uzuvlarına uygulanan net kuvveti algılamak için her eksende yük hücresine ihtiyaç vardır.Yük hücreleri mekanik bağlantı çubuklarına Şekil 32’de gösterildiği gibi eksenel bağlanmıştır.
Şekil 32.Kuvvet sensörü bağlantısı Kuvvet Sensörü
36
FUTEK LCM 200 kuvvet sensörleri, FUTEK CSG110 analog yükselticiler ile bilirkte kullanılmış, kuvvet verisi motor sürücüleri üzerinden okunmuştur. Eksenel yönde 1112 N (250lb) çekme ve basma kuvvetleri ± 10 V aralığında okunabilmektedir. Kuvvet ölçümleri 1kHz bant genişliğinde alınabilmektedir. Yük hücresi ve analog yükseltici bilgileri Ek 5’te verilmiştir.
Kumanda yükleme sisteminde kullanılan motorların ve sürücülerin güç beslemesi sırasıyla 360 V ve 24 V ile sağlanmaktadır.
4.2. Kontrol Sistemi
Kumanda Simülasyon Modeli (KSM) tarafından hesaplanan kuvvetlerin pilot kumandalarında anlık olarak gerçeklenmesi her kanalın iç çevriminin görevidir. Kumanda uzvunun konumu ve kumanda uzvuna uygulanan net kuvvet anlık olarak ölçülür. Motorlara gönderilecek referans sinyaller, ölçülen konum ve kuvvet bilgilerine bağlı olarak üretilir. İç çevrimin şeması Şekil 33’te verilmiştir.
Şekil 33. İç çevrim şeması
Pilotun dokunsal algısının gerçekçi olması için iç çevrim hızının asgari 2 kHz olması gerekmektedir. Bu gereksinimin sağlanması için, öncelikle, kontrol bilgisayarında gerçek zamanlı işletim sistemi kullanılmalıdır. Motor sürücüleri ile kontrol bilgisayarı arasındaki veri iletişiminin de yüksek hızlı bir iletişim protokolüyle sağlanması gerekir. Bu çalışmada gerçek zamanlı işletim sistemi olarak
37
MATLAB/xPC Target, haberleşme protokolü olarak da EtherCAT tercih edilmiştir. Bölümün devamında bu teknolojiler detaylandırılmış ve yapılan uygulama anlatılmıştır.
4.2.1. xPC Target
Bir MATLAB eklentisi olan xPC Target, katı gerçek zamanlı işlem yapılabilmesine olanak sağlar. Ana bilgisayar ve hedef bilgisayar olmak üzere iki bileşenden oluşur. Ana bilgisayarda MATLAB/Simulink çalışmaktadır. Hedef bilgisayarda ise xPC Target kerneli çalışır (Şekil 34). Bilgisayarlar arasındaki bağlantı TCP/IP üzerinden kurulduktan sonra, MATLAB’da geliştirilen model C koduna dönüştürülerek hedef bilgisayara gönderilir ve çalıştırılır. Model hedef bilgisayarda çalışırken herhangi bir parametre sistemi durdurmadan izlenebilir ve değiştirilebilir. Hedef bilgisayar olarak herhangi bir masaüstü bilgisayar kullanılabilir ancak ağ kartı ve ekran kartı çip seti, sistemin düzgün çalışması için önemlidir. Bu çalışmada hedef bilgisayar olarak endüstriyel çalışma istasyonu olan HP Z 620 bilgisayarı kullanılmıştır.
Şekil 34.xPC Target bağlantı şeması [45]
C kodu gönderildikten sonra hedef bilgisayar, isteğe bağlı olarak, tek başına da çalışabilir. xPC Target CAN, etherCAT, RS232 gibi birçok haberleşeme protokolünü desteklemektedir. EtherCAT’ın çalışabilmesi için gerekli ağ adaptörü konusunda çip set kısıtlamaları bulunmaktadır. EtherCAT’ın kullanılabilmesi için Intel 825XX çip setli bir ağ adaptörü gerekmektedir.
38
4.2.2. EtherCAT haberleşme protokolü
EtherCAT (Ethernet for Control Automation Technology) protokolü, diğer endüstriyel haberleşme protokolleri arasında en yeni ve en hızlı protokoldür. 2004 yılında ETG firması tarafından açık kaynak olarak Ethernet altyapısından geliştirilmiştir. EtherCAT, en etkili haberleşme çözümü sunan çözümdür [46, 47].
Merkez-uydu (master-slave) haberleşmesine dayalı olarak çalışan EtherCAT, bir merkez ve birçok uydu cihazdan oluşmaktadır (Şekil 35). Merkez, uydu cihazlara önceden belirlenmiş veri paketlerini gönderir. Veri paketi uydu cihazlarda veri alış-verişini aynı anda yapar. Kullanılan datagram ethernet temelli olup endüstriyel uygulamalar için değiştirilmiş ve geliştirilmiştir.
Şekil 35.EtherCAT iletişim şeması [47]
EtherCAT I/O seviyesinde gerçek zamanlı haberleşmeyi sağlar. Dijital, analog giriş çıkışlar, motor sürücüleri ve farklı ara yüzlü sistemleri tek bir EtherCAT protokolü ile kontrol edilebilir. EtherCAT transfer hızı 2x100 Mbit/s (tam çift yönlü iletim hızı)’dır. Ayrıca aynı ağda 256 adet dijital I/O ile 11μs, ayrıştırılmış 100 merkeze dağıtılmış 1000 dijital I/O ile 30 μs, 16 bit çözünürlüklü 20 kHz örneklemeli 200 analog I/O ile 50 μs, 100 adet servo motoru ile 100μs yenileme sürelerinde
39
haberleşmek mümkündür. I/O modülleri sisteme sonradan eklenebilir veya çıkarılabilir.
Merkez olarak tabir edilen ana cihaz, özel bir karta ihtiyaç duymaz, çok basit bir arabirimle mevcut Ethernet denetleyicileri EtherCAT cihazı olarak kullanılabilir. Bu nedenle EtherCAT küçük ve orta büyüklükteki kontrol platformları için de uygundur. EtherCAT teknolojisinin sunduğu yüksek performans ile klasik fieldbus yapılarıyla gerçekleştirilen sistemlerin denetim ve düzenlenmesi yapılabilir [48]. EtherCAT protokolünün işlemlerini bilgisayar işlemcisi yaptığı için yüksek işlem kapasiteli işlemciler ile daha yüksek performans değerlerine ulaşmak mümkündür. EtherCAT protokolü sadece servo sürücülerinin hız kontrolünün yanında dağıtık sürücülerin akım kontrolünü de sağlayabilmektedir.
EtherCAT, standart IEEE 802.3 ethernet yapısını kullanmaktadır. EtherCAT veri yapısı Şekil 36’da verilmiştir.
40
EtherCAT veri yapısının önceden oluşturulması, hangi uydularda hangi veri alışverişlerinin gerçekleştirileceğinin belirlenmesi gerekmektedir [49]. Tüm uydu cihazlar için cihaz bilgi (ESI –EtherCAT Slave Info) xml dosyası gerekmektedir. ESI xml dosyası veri isimleri, indeks bilgilerini içerir. Tüm cihazlar arasındaki bağlantılar standart ethernet kabloları (>CAT5) ile yapıldıktan sonra TwinCAT veya benzeri EtherCAT yapılandırma programları yardımı ile uydu cihazlarda kullanılmak istenen veriler ve çevrim süreleri ayarlanır. İşlemlerin veri bilgilerini içeren EtherCAT ağ bilgisi (ENI) xml formatında EtherCAT merkezine yüklenir ve tüm veri yapısı ENI dosyasına göre çalışır (Şekil 37).
Şekil 37. EtherCAT yapılandırması [49]
EtherCAT çalışma durumları, başlangıç durumu (INIT), operasyon öncesi durum (Pre-OP), güvenli operasyon durumu (Safe-OP), Operasyon durumu (OP) olmak üzere dört adettir. Durumlar arası geçişler Şekil 38’de veriliği üzeredir. Safe-OP’da uydu cihazlardan veri alınıp okunabilir durumdadır. Tüm fonksiyonel görevlerin yerine getirilebilmesi için OP durumda olunması gerekmektedir.
41
Şekil 38. EtherCAT çalışma durumları [46]
EtherCAT, servo sürücüleri için standart haline getirilmiş DS402 (Draft Standard) profil durumlarına göre çalışmaktadır [50]. DS402 CAN standartlarına göre geliştirilmiştir. EtherCAT DS402 profilini CoE (CAN over EtherCAT) üzerinden çalıştırmaktadır.
4.2.3. EtherCAT Merkez Bilgisayarının Yapılandırılması
Gerçek zamanlı çalışan xPC Target hedef bilgisayarı EtherCAT merkezi olacak şekilde yapılandırılmıştır. Hedef bilgisayarda Intel 82576 LM ve Intel 82574 L çipsetli iki adet ethernet adaptörü kullanılmıştır. Intel 82576 LM çipsetli adaptör EtherCAT ağı için, Intel 82574 L ise xPC Target ana ve hedef bilgisayarları arasındaki bağlantının kurulması için kullanılmıştır. EtherCAT merkezi EtherCAT uyduları olan motor sürücüleri ile veri alışverişi yapacaktır (Şekil 39).
42
Simulink modelinde EtherCAT’ın kullanılabilmesi için EtherCAT başlangıç, yenileme ve veri yapısının alınması ve gönderilmesi için bloklar kullanılmıştır. Ayrıca, EtherCAT durumları arasında geçişler sağlanabilmektedir.
Hedef bilgisayarın merkez olarak görev yapabilmesi için EtherCAT başlangıç bloğunda EtherCAT ağ bilgisi (ENI) dosyasının xml formatında yüklenmesi gerekmektedir. Bu dosya merkez ve uydu cihazlara ait bilgileri, yürütülecek görevleri ve taşınan değişkenleri içerir. Kullanılan diğer tüm Simulink blokları ENI xml dosyasının içeriğine göre çalışmaktadır.
ENI xml dosyasını oluşturmak için ilk aşama cihaz bilgi (ESI –EtherCAT Slave Info) xml dosyasında gerekli düzenlemeleri yapmaktır. ESI, kullanılan cihaz ile ilgili veri tipleri ve indeks bilgilerini içermektedir. DS402’ye göre kullanılmak istenilen kontrolcü modu ESI içeriğine göre belirlenir. Tüm kontrollerin yapılabileceği bir ESI oluşturmak mümkün olsa da, sisteme ek işlem yükü getirdiği için sadece kullanılacak olan kontrolcü tercih edilmelidir. DS402 profili, tork kontrolcüsü olacak şekilde istenilen ek özellikler de eklenerek, ESI güncellenmiştir (Şekil 40).
![Şekil 2.Pilot kabininin robot koluna bağlandığı uçuş simülatörü [14]](https://thumb-eu.123doks.com/thumbv2/9libnet/3763832.28792/17.892.177.783.371.631/şekil-pilot-kabininin-robot-koluna-bağlandığı-uçuş-simülatörü.webp)
![Şekil 6.Hidrolik eyleyicili KYS yapısı [21]](https://thumb-eu.123doks.com/thumbv2/9libnet/3763832.28792/21.892.178.782.700.981/şekil-hidrolik-eyleyicili-kys-yapısı.webp)
![Şekil 9. Yer değiştirme, diferansiyel basınç ve oransal geri beslemeli kontrol yapısı [29]](https://thumb-eu.123doks.com/thumbv2/9libnet/3763832.28792/25.892.182.785.478.709/şekil-değiştirme-diferansiyel-basınç-oransal-beslemeli-kontrol-yapısı.webp)
![Şekil 16. Pilot görüşüne dayalı ince ayar işleminin akış diyagramı [42]](https://thumb-eu.123doks.com/thumbv2/9libnet/3763832.28792/33.892.236.725.170.485/şekil-pilot-görüşüne-dayalı-ince-işleminin-akış-diyagramı.webp)