Bilgisayar ve İnsanda Renkli Görme
Color Vision in Humans and Computers
Hüseyin Boyacı
1, Lale Akarun
21. Psikoloji Bölümü
Bilkent Üniversitesi
[email protected]2. Bilgisayar Mühendisliği Bölümü
Boğaziçi Üniversitesi
[email protected]Özetçe
Insanlar ve pek çok diğer canlı türleri cisimleri tanımada renklere güvenirler. Renkli görmenin biyolojik altyapıları nelerdir ve insanın renk algısı sayısal olarak nasıl modellenebilir? Bu çalışmada, yakın zamanda gerçekleşen renkli görmenin retina düzeyindeki erken aşamaları ile ilgili gelişmeleri, yine yakın zamanda geliştirilen, üç boyutlu dünyada zengin bağlamlarda renk algısının sayısal modellerini kisaca ozetliyoruz. Araştirmacıların renkli görme ile ilgili korteks seviyesindeki işlemleri sistemli bir şekilde çalışmaya başlamalarına izin veren sinir görüntüleme alanındaki yeni gelişmelerin üzerinde de duruyoruz.
Abstract
Humans and many other species rely on color for object recognition. What are the biological underpinnings of color vision and how can we computationally model human color perception? In this study we briefly summarize recent advences regarding the very early, retinal stages of color vision, as well as recent behavioral models of color perception in three dimensional world within rich context. We also emphasize the recent events on the neuroimaging front that allow the researchers begin to systematically study the cortical processes related to color vision.
1. Giriş
İnsan beyni ve sinir sistemi, nesnelerin varlıklarını ve konumlarını belirlemede ve nesneleri tanımada önemli bir rol oynayan renkli görme konusuna büyük miktarda kaynak ayırmıştır. Nedir renkli görmenin faydaları ve neden bu kadar çok kaynak renkli görmeye ayrılmıştır? Renkli görmenin nasıl evrimleştiğinden tam olarak emin olamasak da renkleri algılayabilmenin getirdiği avantajları sıralayabiliriz. Örneğin şekil-plan ayrıştırması değişik renklere sahip bölgeler arasında daha güvenilir bir biçimde yapılabilir. Şekil-plan ayrıştırması pek çok başka faydanın dışında, yiyecek arayan bir hayvan için aradığı yiyeceği farketmesi ve yerini bulması için ilk adimdir. Üstelik renk ve yüzeyin ışığı yansıtma özellikleri çoğu zaman yiyeceklerin tazeliği, olgunluğu ve yenilebilirliği hakkında ipuçları da içerir. Bu etkenler, renk algısına sahip bir canlıyı, renk algısına sahip olmayan bir canlıya göre doğada daha avantajlı duruma geçirebilir. Renk sosyal iletişim aracı olarak da kullanılır. Örneğin: cinsiyeti ve seksüel kabuledilirliği belirtmek ve insanın kızdığında veya
utandığında yüzünün kızarmasında olduğu gibi duyguları ifade etmek ve anlamak için. Öyle ki Russel ve diğerleri [1] bazı koşullar altında renklerin yüzleri tanımada şekillere göre daha etkin olduğunu göstermişlerdir.
Peki fiziksel olarak renk nedir? Gerçekte renk denildiğinde kastedilen, ışığın dalgaboyu dağılımının insan algısında yarattğı duyudur. Bir başka deyişle, renkli görme doğanın harika sayılabilecek bir buluşudur: sadece birer enerji paketi olan fotonları, dalga boylarına göre ayırıp kodlama işini böylesine muhteşem bir “renk cümbüşüne” dönüştüren bilincimizdir, fotonların gerçekte kendi hallerinde renkleri yoktur. Bilgisayarla görme açısından baktığımızda durum şudur: Pek çok renkli sinyal işleme uygulaması, çevrimin içindeki insan dışarı çıkarılmadan tasarlanmıştır. Dolayısıyla bilgisayarla görmede renk algısı, çoğunlukla çevrimin içindeki insan tarafından üstlenilmektedir. Oysa, bilgisayarla görmenin amacı, insanı çevrimin dışına çıkarmak ve çıkarsamayı makinaya yaptırmaktır.
Bilgisayarda renk algısı konusunda başarının yolu, öncelikle insanda renk algısının nasıl gerçekleştiğini anlamak, sonra da bilgisayarla görme uygulamalarında bu bilgileri kullanmaktan geçmektedir. Örnek verecek olursak, eteğimizin üstündeki düğmenin her türlü ışıkta etekle aynı renk görünmesini sağlamak için, kahverengi ceket ile mor pantolonun uyumsuzluğunu saptamak için, ekranda gördüğümüz renkli resmi kağıda bastığımızda aynı renk olmasını sağlamak için insanda renkli görmeyi anlamalıyız.
2. İnsanda ve Canlılarda Renkli Görme
Hernekadar günlük hayatımızda renkleri zahmetsizce ve kolayca görsek de, renkli görmenin altında yatan sinirsel mekanizmalar yüzyıllardır yapılagelen bilimsel araştırmalara karşın hala tam olarak bilinmemektedir. İnsanda renkli görmeyi anlamak için spektral kodlama ve renk algısı arasındaki farkın üzerinde durmamız gerekir. Kodlama dediğimizde, nöronların değişik dalga boylarındaki ışığa karşı duyarlılığını kastederiz. Bu adım, tıpkı aşağıda da üzerinde durduğumuz gibi, bir spektrometrenin ışığı analiz etmesine benzer. Fakat elbette bu analiz kendi başına yeterli değildir, zaten bu yüzden çok hassas spektrofotometrelerin varlığına karşın, bilgisayarla renkli görme hala üzerinde çalışılan, çözümlenmeyi bekleyen bir sorundur. İkinci adım olan renk algısı ise, manavda en güzel görünüşlü muzu seçerken olduğu gibi doğal çevremizdeki deneyimlerimizi kapsar.
2.1. Canlılarda Renkli Görmenin Erken Aşamaları
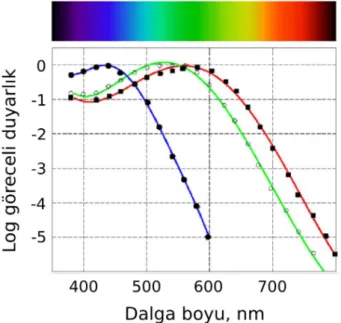
Canlılarda renkleri kodlamanın erken aşamaları görece iyi anlaşılmıştır. İnsan retinasında, üçü spektral seçiciliğe, biri ise ışık yeğinliğine duyarlı olmak üzere, dört çeşit fotoalgılayıcı bulunur. Köpeklerin ise sadece iki adet spektral seçici fotoalgılayıcısı vardır. Renk boyutu olarak, insanlar trikromat, köpekler dikromattırlar. Bu spektral seçici fotoalgılayıcılar koni fotoalgılayıcılar (yada kısaca koniler) adıyla anılırken, insandaki üç değişik koni duyarlı oldukları dalga boylarına göre L-, M- ve S-konileri olarak sınıflandırılmışlardır (sırasıyla uzun, orta ve kısa dalga boylarına duyarlı koniler, Sekil 1).
Şekil 1: L- , M- ve S- konilerinin spectral duyarlılıkları
sırasıyla kırmızı, yeşil ve mavi fonksiyonlarla gösterilmiştir. En üstte dalga boylarına karsılık gelen renkler görülmektedir.
İnsan dışındaki bazı canlılar, örneğin bazı böcekler, balıklar ve kuşlar bundan daha fazla sayıda fotoalgılayıcı sınıfına sahiptir. Örneğin stomatopod crustaneans, onbirden onaltıya kadar değişik sınıfta fotoalgılayıcıya sahiptir (Cronin ve Marshall, 1989 [2]; Cronin ve diğerleri, 2000 [3])! Bazı canlılar farklı sınıfta fotoalgılayıcıların yanısıra retinalarında bulunan yağ damlacıklarını birer spektral filtre olarak kullanmak yoluyla da spektral seçiciliklerini ileri götürmektedirler. Öte yandan bazı tür canlılar farklı sınıfta fotoalgılayıcılara sahip olmalarına karşın genel bir renk algısına sahip değillerdir. Bu da retinada gerekli donanımın bulunmasının başlı başına renkli görmeye yeterli olmadığını göstermektedir. Maloney (1992) [4] matematiksel yöntemler ve doğal ortamların görüntüleri üzerinden elde edilmiş spektral verileri kullanarak, üç sınıf koninin insanın içinde bulunduğu doğal çevrede başarılı bir şekilde yaşamını sürdürmesıne uygun olduğunu göstermiştir.
Hofer ve diğerleri (2005) [5] yakın zamanda adaptif optik yöntemiyle koni fotoalgılayıcılarının insan retinasındaki koni mozaigi diye de anılan dağılımını ortaya çıkardılar (Sekil 2). Hofer ve diğerlerinin [5] bulguları görsel algı cemiyetini şaşırtan nitelikteydi. Bu şaşırtıcı bulgulardan birisi, değişik sınıf konilerin sayısal oranlarının kişiler arasında büyük farklılıklar göstermesi, fakat daha da şaşırtıcı olanı ise L- ve M- konileri sayıları arasında daha büyük farklar bulunan deneklerin tek bir koniye isabet edecek şekilde gönderilen tek nokta ışınımlarını daha büyük bir sıklıkla beyaz olarak görmeleriydi. Oysa böylesi bir tek nokta ışınımı sadece bir
koniyi aydınlattığında, deneklerin o koninin duyarlı olduğu dalga boyuna bağlı olarak ışığı beyaz değil renkli görmeleri beklenmekteydi. Bunun üzerine Brainard ve diğerleri (2007) [6] konilerden gelen sinyalleri değerlendirirken koni mozağini de gözönüne alan Bayes modeli bir görsel sistemin Hofer ve diğerlerinin [5] bulgularını açıklayabileceğini gösterdi. Bu modele göre, dış dünyanın ve koni mozağinin bilinen özelliklerine dayanarak oluşturulan bir prior dağılım (prior distribution), P(i) (i=[L M S] koni aktivasyon vektoru), konileri aydınlatan ışınımın renginin konilerin her birinin aktivasyonuna bağlılığı (likelihood), P(r|i), ile birleştirilerek, o ışınımın rengi hakkında bir posterior olasılık dağılımı (posterior probability distribution), P(i|r) bulunabilir. Brainard ve diğerleri [6] bu modeli her bir deneğin koni mozaiğini hesaba katarak sayısal olarak simule ettiklerinde deneysel bulgulara çok yakın sonuçlar çıkarmayı başarmışlardır. Ancak, canlılarda renk kodlamanın ilk aşamalarının anlaşılmasında kaydedilen tüm bu başarılara karşın ne yazık ki korteks seviyesinde neler olduğu hiç de açık değildir (bakınız Zeki (2003) [7]).
Şekil 2: Bir deneğin fovea yakınındaki koni mozaiği.
L-, M- ve S- konileri kırmzı, yeşil ve mavi olarak sonradan renklendirilmiştir. (Hofer ve diğerleri (2005)
[5]).
2.2. İnsanda Renk Algısının temel özellikleri
Simdi dikkatimizi renk algısına, yani dünyada renge dayalı deneyimlerimize çevirelim. Renk bir canlının nesnelerin varlığını belirlemesi, yerlerini tespit etmesi ve nesneleri tanımasına nasıl hizmet eder? Bir yüzeyden yansıyan ışığın spektral dağılımı, sadece o yüzeyin yansıtma özelliklerine değil aynı zamanda yüzeyi aydınlatan ışık kaynaklarının kendi geometrisine göre uzaysal dağılımlarına ve spektral içeriklerine de bağlıdır. Örneğin, bir muzdan yansıyan ışık, bu muza mutfağımızın tungsten ışığı altında baktığımızda, yine aynı muza güneş ışığı altında baktığımızdakinden çok farklı bir spektral dağılıma sahip olacaktır. Buna karşın, muzun rengini çoklukla aynı sarı olarak algılarız. Bu görsel sistem için önemli bir başarıdır aslında. Çünkü bir nesnenin rengi o nesnenin içsel (intrinsic) bir özelliğidir ve değişmez, fakat onu aydinlatan ışık kaynakları haricidir (extrinsic) ve her an değişebilir. Bir organizmanın nesneleri güvenli bir şekilde taniyabilmesi için değişken dış dünyanın etkilerini bir şekilde bertaraf etmesi ve nesnenin içsel rengini belirlemesi gerekir. Nesnelerin renklerinin değişen şartlara rağmen sabit kalmasına renk sabitliği (color constancy) adı verilmiştir. Renk sabitliği labarotuvar şartlarında mükemmel değildir, fakat doğal ortamlarda yeterince sağlam ve güvenilirdir. Renk algımızın temelini oluşturduğu için, renk sabitliği konusu, renk algısı üzerine yapılan araştırmaların pek çoğunun üzerinde durduğu konu olmuştur.
Gestalt kuramları ikinci dünya savaşı öncesinde renk algısı konusundaki calışmaların ağırlığını oluşturmaktaydı. Ancak ikinci dünya savaşı sonrası, nöro-fizyoloji alanındaki ilerlemelerin itici gücüyle araştırmacılar renk sabitliği de
dahil olmak üzere görsel algı prensiplerinin sadece nöronların aktivasyon paternlerini analiz ederek bulunabileceklerini düşünmüşlerdir (genel bir gözden geçirme icin Gilchrist ve diğelerine (1999) [8] bakınız). Bu yaklaşım bir takım iki boyutlu ön-paralel (fronto-parallel) yüzeyler için iyi sonuçlar vermekteydi. Bunlar arasında iyi bilinen bir tanesi Land ve McCann'ın (1971) [9] Retinex Modelidir. Gelgelelim bu bu modeller iki boyutlu retinal imgeyi analiz etmeyle sınırlıydılar ve sahnedeki üç boyutlu ipuçlarina ve doğal çevremizde mevcut bulunan düzenliliklere (regularities) karşı kördüler. Onlarca yıl süren araştırmaların ardından, sonunda görsel algının her bakımdan anlaşılmasının sadece bu modellere dayanarak gerçekleşemeyeceği anlaşılmıştır.
Bir yüzeyin rengini doğru bir şekilde belirlemek için görsel sistemin nesneyi aydınlatan ışığın gücünü ve kromatisini (chromaticity) göz önüne alması gerekir. Bu doğrultudaki düşünüş literatürdeki “eşdeğer aydınlatma modeli”ni (equivalent illuminant model) geliştirdi (Bloj ve diğerleri (1999) [10], Boyaci ve diğerleri (2003) [11] ve (2006) [12], Ripamonti ve diğerleri (2004) [13], Bloj ve diğerleri (2004) [14]). Eşdeğer aydınlatma modeline göre insan gözlemcilerin renk tahminleri, ışığın uzayda nasıl ilerlediğini ve nesnelerin yüzeyleriyle nasıl etkileşime girdiğini fiziksel anlamda bilen ve buna dayanarak değişiken aydınlatmayı göz önüne alan bir ideal gözlemci modeli ile uyum göstermektedir. Fakat dikkat edilmelidir ki bunu yapmak için görsel sistemin açıkca altı boyutlu (üç uzaysal, üç kromatik) bir aydınlatma modeli geliştermesi gerekli olmayabilir. Çünkü üç boyutlu dünyamızda çoklu ışık kaynaklarının uzaysal dağılımları ve kromatisileri (chromaticities) hakkındaki ipuçları mevcuttur. Böylesi ipucu kaynaklarına aydınlatıcı ipuçları (illuminant cues) adı verilir. Aynasal parlak noktalar (specular highlights) (Yang ve Maloney (2001) [15]), atık gölgeler (cast shadow) ve luminans gradyanları (Boyaci ve diğerleri (2006) [16]) aydınlatıcı ipuçlarından bazılarıdır. Geçen yüzyılının sonu ile birlikte, teknoloji ve bilgisayarlardaki gelişmeler araştırmacılara labaratuvar ortamlarında üç boyutlu ve gerçeğe yakın sanal sahneler yaratmak için yepyeni olanaklar sağladılar. Daha önceleri gerçek fiziksel uyaranlar üzerinde çalışmakla kısıtlanmış olan araştırmacıların böylesi sahneleri hazırlayabilmeleri oldukça güçtü. Üstelik, bilgisayar ortamında araştırmacılar uyaranın bazı özelliklerini gerçeğe aykırı olarak değiştirebilmektedirler Örneğin, görsel sistemin çeşitli ipuçlarını bir araya getirmesini çalışmanın bir yolu ipuçlarından birisini diğerleriyle uyumsuz bir şekilde değiştirmek, bir ipucu çelişkisi (cue conflict) durumu yaratmaktır. Böylesi yapay bir düzenlemenin kolayca gerçekleştirilmesi ancak sanal ortamlarda mümkün olabilmektedir. Bu yöntemleri kullanan araştırmacılar insan gözlemcilerin üç boyutlu ipuçlarını nasıl kullandıklarını, aydınlatıcı etkisini ve üç boyutlu sahne geometrisini nasil hesaba kattıklarını bulmayı başarmışlardır. (Boyaci ve diğerleri (2003) [11], (2004) [17], Maloney ve diğerleri (2005) [18], Doerschener ve diğerleri (2004) [19], (2007) [20], Ripamonti ve diğerleri (2004) [13], Bloj ve diğerleri (1999) [10], Bloj ve diğerleri (2004) [14]).
3. Bilgisayarla görmede renk gösterimi
Görülebilir ışık, yaklaşık 380 nanometre ile 720 nanometre arasındadır. Bu spektrumu örneklemek istersek, gerekli örnek sayısının 31 olduğu gösterilmiştir . Dolayısıyla, rengi, 31 boyutlu vektörlerden oluşan bir ayrık sinyal olarak düşünebiliriz. Ancak, bilgisayarla görmede, kendimizi görülebilir dalga boyları ile sınırlamak zorunda değiliz: Hiperspektral imgeler, çoğu zaman, görülebilen sepktrumun
dışında bileşenlerdeki enerjiyi de yansıtırlar [21]. İlginçtir ki çoğu renk uygulaması, insan görme sisteminden modellendiğinden dolayı, bilgisayarların kapasitesi daha yüksek olmasına rağmen, sadece görülebilir dalgaboylarının kullanımı yaygındır. Renk ölçme için kullanılan spektrofotometreler, bu 31 dalgaboyunda enerjiyi ölçerler; colorimetreler ise, 31 boyuttan üç boyuta filtreleme yaparak, üç kanallı bir sinyal üretirler [22]. Fourier tarafından önerilen üç kanallı renk modelleri de, insan algısını çevrimin içinde tutan renk modelleridir: Fourier, herhangi bir rengin üç ana renk kullanılarak elde edileceğini varsaymış, bu teorinin yanlışlığı sonradan, Maxwell tarafından gösterilmiştir.
Bilgisayarlarda kullanılan renk modelleri, genelde 31 boyutlu değildir; üç boyutludur. Bunun temel nedeni, pek çok uygulamanın, insanlar tarafından görülecek imgelere göre tasarlanması, ve Thomas Young’ın üç-kanallı renk kuramının tam olarak doğru olmasa da, hemen hemen doğru olmasıdır: İnsanlar tarafından algılanan pek çok renk, üç değişik renk kaynağının karışımı ile üretilebilir. Çok yaygın olarak kullanılan ve kırmızı, yeşil ve mavi renkleri gösteren RGB koordinat sistemi, video kamera ve CRT monitörlerin gösterim biçimine dayalıdır. Aynı şekilde, CMY sistemi renkli yazıcılarda, YIQ sistemi, televizyon sinyallerinin iletiminde kullanılır. Oysa, renk adlandırma, karşılaştırma gibi uygulamalarda, istenirse daha uygun modeller bulunabilir: İnsanlar renklere belli adlar verirler: Sarı, turuncu, kırmızı, yeşil, mavi, mor. Bu etiketlendirme ile yakından ilişkili bir büyüklüğe renk özü (H:hue) adı verilir. Renklerin ne kadar saf olduklarını da doygunluk (S: saturasyon) dediğimiz başka bir büyüklük belirler. Pek çok renk modelinde, H ve S bileşenleri yanında, toplam parlaklığı ifade eden üçüncü bir büyüklük daha vardır: I veya Y. Bunun yanısıra, insan algısına daha yakın, renk farklarının düzgün dağıldığı doğrusal olmayan renk uzayları da vardır. Diğer bir grup koordinat sistemi ise, insan gözünün renk algılamasını daha iyi modelleme amaçlıdır. Bu konuda çalışmalar yapan CIE (Uluslararası renk komitesi) adlı kuruluş, insan gözünün algılamasını daha doğru yansıtan L*a*b* ve L*u*v* renk koordinat sistemlerini tanımlamıştır [23] [22]. Bilgisayarla görme alanında, renk modelleme, renk süzgeçleme, renk eşleştirme, renk ölçme, aydınlatma kestirimi ve renk düzeltme, renk nicemleme, renkli kıpırtılama, renkli imge pekiştirme, renkli imge sıkıştırma gibi renk içeren pek çok uygulama alanı mevcuttur.
3.1. Renkli İmgelerin Nicemlenmesi
Renkli imgelerin nicemlenmesi için literatürde pek çok yöntem önerilmiştir. [24], [25], [26]. Bunlardan, Heckbert yöntemi, renk nicemlemesi problemi için ilk önerilen buluşsal çözümlerden olup, hesaplama kolaylığı getirmesi ve skalar nicemlemeye üstünlüğü dolayısıyla, uygulama programlarında en sık kullanılan yöntemdir [24]. Fakat başarımı çok iyi değildir. Ağaç aramalı yöntemler, belli bir başarım ölçütüne göre eski renkleri bölerek yeni renkler oluştururlar [25]. Birleştirmeye dayalı yöntemler ise, çok sayıda renkten yola çıkarak, renk gruplarının birleştirilmesiyle yeni renk grupları oluştururlar [26]. Bu iki grup algoritma, az bir hız kaybı ile, genelde Heckbert yönteminden daha iyi sonuçlar verirler. K-means algoritması ise, bilindiği gibi, hata fonksiyonunun yerel minimumunu bulabilir. Bu nedenle, başarımı, başlangıç noktasının uygun seçimine bağlıdır. Kullanılan yöntemde, başlangıç noktası, renk histogramının tepelerinden oluşan bir dizi noktada seçilir. Bu yöntem, incelenen yöntemler içinde en iyi sonucu verir. Tek sakıncası, diğer yöntemlere oranla hesaplama zamanının uzunluğudur. Bulanık K-ortalama algoritmasına
dayalı bu yöntemde, iyi bir nicemleme başarısı elde edilmektedir [27].
Yaygın olarak kullanılmasa da, renk nicemlemesi için genetik algoritmalar ve tavlama benzetimi gibi değişik yöntemler de önerilmiştir [28]. Bu yöntemlerin yaygın olarak kullanılamamasının nedeni, hesaplama zamanının uzunluğudur. Tipik bir imgede M=10,000 veya daha fazla renk bulunur. Bu sayıda renkten, örneğin, K=256 renge inilmesi, M vektörün K öbeğe öbeklenmesi problemidir. Zaman kısıtı, renk nicemlemesi probleminde klasik genel eniyileme yöntemlerinin kullanılmasını engeller.
3.2. Renkli İmgelerin Kıpırtılanması
Nicemleyicide az sayıda nicemleme renginin kullanılmasına bağlı olarak, özgün imgede düzgün değişen alanların bulunduğu yerlerde yalancı kenarlar ortaya çıkabilir. Bu tür rahatsız edici yalancı kenarları gidermek ve renkleri daha iyi gösterebilmek için kıpırtılama kullanılır. Kıpırtılama, insan gözünün ortalama alma özelliğinden yararlanarak, az sayıda rengin serpiştirilerek kullanılması ile daha çok sayıda renk sanısı yaratılması tekniğidir. Kıpırtılama için kullanılan tekniklerden birisi olan hatanın dağıtılması, bu etkiyi yaratmak için, bir pikselde oluşan nicemleme hatasını, komşu piksellere dağıtır: Böylece, komşu piksellerdeki nicemleme hatalarının birbirini dengelemesi sağlanır. Hatanın dağıtılması için geleneksel olarak kullanılan süzgeçlerden bazıları, Floyd-Steinberg, Stucki ve Jarvice-Judice-Ninke süzgeçleridir [29]. Son zamanlarda, verilen nicemleyici için optimum hata dağıtma süzgecini bulan genel ve uyarlamalı bazı yapılar önerilmiştir. Bu yöntemlerden biri, hata dağıtmalı kıpırtılama süzgecinde imge istatistiklerine bağlı olarak eniyi süzgeç katsayılarının bulunması ile çalışmaktadır [30]. Bunun yanısıra, nicemleme ve kıpırtalamayı beraberce düşünüp çözüm bulan uygulamalar da geliştirilmiştir [31], [32].
4. Sonuçlar
Günümüzde insanda renk algısı konusunda hatırı sayılır miktarda veri toplanmış durumdadır. Ne var ki, renk algısı üzerine geliştirilen modellerin sayısının çokluğuna karşın, renk algısıyla ilgili çeşitli olguları açıklamak üzere genelleştirilebilecek bir model henüz ortada yoktur. Bilinmeyenler zincirinin önemli bir parçası, korteks seviyesindeki işlemleri anlamaktır. Başarılı bir renk algısı modeli, mutlaka sinir sisteminde renkli görme işinin nasıl başarıldığıyla uyumlu olmak zorundadır. Nörogörüntüleme alanında, örneğin işlevsel manyetik rezonans görüntüleme (fMRI), elektroensefalografi (EEG), magnetoensefalografi (MEG), yaşanmakta olan gelişmeler bunun başarılması yönünde umut vermektedirler. Bu teknikleri kullanan araştırmacılar, korteksin değişik alanlarının renk algısı sırasındaki işlevlerini sistematik bir biçimde çalışmaktadırlar (örnek: Engel (2005) [33], Boyaci ve diğerleri (2007) [34]).
Yukarıda saydığımız bilgisayarla görme alanındaki uygulamaların, bilgisayarla görme değil, imge işleme uygulamaları olması bir tesadüf değildir: İmge işlemenin çıktısı, bir insanın görüşüne, kontrolüne, beğenisine sunulacak bir imgedir; dolayısıyla, insan, çevrimin içindedir. Oysa teknik imkanlar doğru kullanılabilir, insandaki renk algısının temelleri anlaşılıp bilgisayarda modelleri kurulabilirse, makinalar en azından renk açısından insandan daha iyi 'görebilir'.
5. Teşekkür
Bu makalenin hazırlanışı sırasındaki yorum ve katkıları için Didem Gökçay'a teşekkür ederiz.
6. Kaynakça
[1] Russell, R., Biederman, I., Nederhauser, M., and Sinha, P., “The utility of surface reflectance for the recognition of upright and inverted faces,” Vision Research, Vol. 47,
2007, p 157-165.
[2] Cronin, T.W. and Marshall, N.J., “A retina with at least ten spectral types of photoreceptors in a mantis shrimp,”
Nature, Vol. 339, 1989, p 137-140.
[3] Cronin, T.W., Marshall, N.J. and Caldwell, R.L., “Spectral tuning and the visual ecology of mantis shrimps,” Philosophical Transactions: Biological
Sciences, Vol. 355, 2000, p 1263-1267.
[4] Maloney, L.T., “Evaluation of linear surface spectral reflectance with small number of parameters,” in Physics-Based Vision: Principles and Practice, edited by Glenn Healey, Steven A Shafer, Lawrence B Wolff. A K Peters, Ltd., 1992.
[5] Hofer, H., Singer, B., and Williams, D.R., “Different sensations from cones with the same photopigment,”
Journal of Vision, Vol. 5, 2005, p 444-454.
[6] Brainard, D.H., Hofer, H., and Williams, D.R.,
“Bayesian models of color appearance: Understanding
the appearance of small spot colors,” Journal of Vision,
Vol. 7, 2007, p 791.
[7] Zeki, S., “Improbable areas in color vision,” in Visual Neuroscience, edited by Leo M. Chalupa and John S. Werner, The MIT Press, Cambridge Massachusettes, 2003, p 1029-1039.
[8] Gilchrist, A., Kossyfidis, C., Bonato, F., Agostini, T., Cataliotti, J., Li, X., Spehar, B., Annan, V. and Economou, E., “An anchoring theory of lightness perception,” Psychological Review Vol. 106, 1999, p
795-834.
[9] Land, E.H. and McCann, J.J., “Lightness and retinex theory,” Journal of Optical Society of America, Vol. 61,
1971, p 1-11.
[10] Bloj, M.G., Kersten, D. and Hurlbert, A.C., “Perception of three-dimensional shape influences colour perception through mutual illumination,” Nature, Vol. 402, 1999, p
877-879.
[11] Boyaci, H., Maloney, L.T., Hersh, S., “The effect of perceived surface orientation on perceived surface albedo in binocularly viewed scenes,” Journal of Vision, Vol. 3,
2003, p 541-553.
[12] Boyaci, H., Doerschner, K., Snyder, J., and Maloney, L.T., “Surface Color Perception in Three-Dimensional Scenes,” Visual Neuroscience, Vol. 23, 2006, p 311-321. [13] Ripamonti, C., Bloj, M., Hauck, R., Kiran, M.,
Greenwald, S., Maloney, SI, Brainard, D.H., “Measurements of the effect of surface slant on perceived lightness,” Journal of Vision, Vol. 4, 2004, p
747-763.
[14] Bloj, M., Ripamonti, C., Mitha, K., Hauck, R., Greenwald, S. and Brainard, D.H., “An equivalent illuminant model for the effect of surface slant on perceived lightness,” Journal of Vision, Vol. 4, 2004, p
735-746.
[15] Yang, J.N. and Maloney, L.T., “Illuminant cues in surface color perception: tests of three candidate cues,”
[16] Boyaci, H., Doerschner, K., and Maloney, L.T., “Cues to an equivalent lighting model,” Journal of Vision, Vol. 6,
2006, p 106-118.
[17] Boyaci, H., Doerschner, K., and Maloney, L.T., “Perceived surface color in binocularly-viewed scenes with two light sources differing in chromaticity,” Journal
of Vision, Vol. 4, 2004, p 664-679.
[18] Maloney, L.T., Boyaci, H., Doerschner, K., “Surface color perception as an inverse problem in biological vision,” in Computational Imaging III, edited by Charles A. Bouman, Eric L. Miller, Proceedings of SPIE-IS\&T Electronic Imaging, SPIE Vol. 5674, 2005 .
[19] Doerschner, K., Boyaci, H., and Maloney, L.T., “Human observers compensate for secondary illumination originating in nearby chromatic surfaces,” Journal of
Vision, Vol. 4, 2004, p 92-105.
[20] Doerschner, K., Boyaci, H., and Maloney, L.T., “Testing limits on matte surface color perception in three-dimensional scenes with complex light fields,” Vision
Research, Vol. 47, 2007, p 3409-3423.
[21] Special Issue on Exploiting Hyperspectral Imagery, IEEE Signal Processing Magazine, January 2002. [22] Trussel, H.J. “DSP solutions run the gamut for color
systems,” IEEE Signal Processing Magazine, vol. 10, no. 2, p 6-23, April 1993.
[23] Pratt, W.K., Digital Image Processing, Wiley, 1991. [24] Heckbert, P. “Color image quantization for frame buffer
display,” Computer Graph., vol. 16, pp. 297-307, July 1982.
[25] Orchard, M.T. and Bouman, C.A., “Color quantization of images,” IEEE Trans. Signal Processing, vol. 39, pp. 2677-2690, December 1991.
[26] Walowit, R.E. And Allebach, J.P., “Quantization and multi-level halftoning of color images for near-original image quality,” J. Opt. Soc. Am. A, Vol. 7, p 1019-1026,
June 1990.
[27] Özdemir, D. and Akarun, L., “An algorithm for fuzzy color quantization of images”, Pattern Recognition (Special Issue on Color Imaging), vol 35, no. 8, pp. 1785-1791, August 2002.
[28] Tasdizen, T., Akarun, L. and Ersoy, C., “Color Quantization with genetic algorithms,” Signal Processing: Image Communication, vol. 12, pp. 49-57, January 1998.
[29] Ulichney, R.A., “Dithering with blue noise”, Proc.
IEEE, Vol 76, p 56-79, Jan. 1988.
[30] Akarun, L., Yardımcı, Y. and Çetin, A.E., "Adaptive Methods for Dithering of Color Images", IEEE Transactions on Image Processing, vol. 6, no.7, pp. 950-955, July 1997.
[31] Özdemir, D. and Akarun, L., “Fuzzy Algorithms for combined quantization and dithering”, IEEE Transactions on Image Processing, vol. 10, no 6, pp. 923-931, June 2001.
[32] Özdemir, D. and Akarun, L., “Fuzzy Error Diffusion”, IEEE Transactions on Image Processing, vol. 9, no 4, pp. 683-690, April 2000.
[33] Engel, S.A., “Adaptation of Oriented and Unoriented Color-Selective Neurons in Human Visual Areas,”
Neuron, Vol. 45, 2005, p 613-623.
[34] Boyaci, H., Fang, F., Murray, S.O., Kersten, D., “Responses to lightness variations in early human visual cortex,” Current Biology, Vol. 17, 2007, p 989-993.