A method for extracting object related information from in-line holograms using Wigner distribution
Tam metin
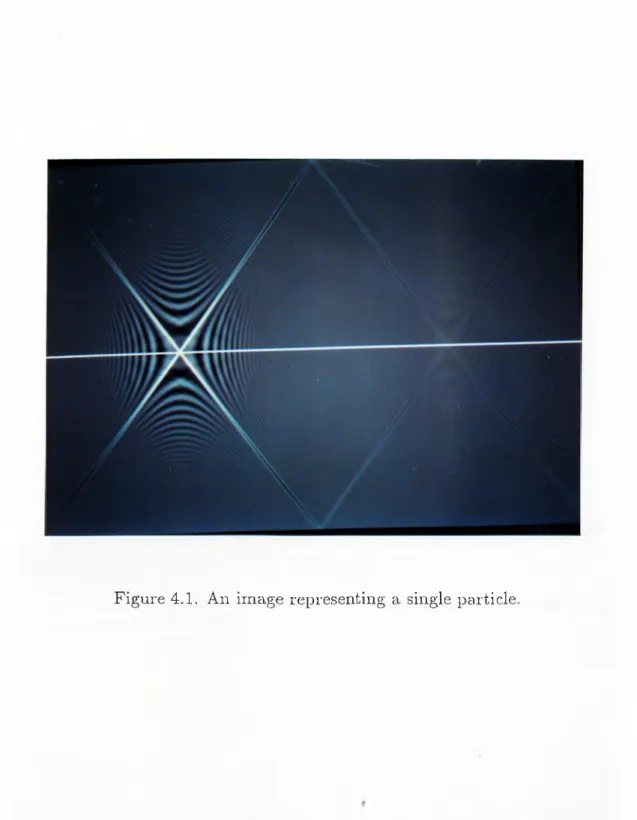
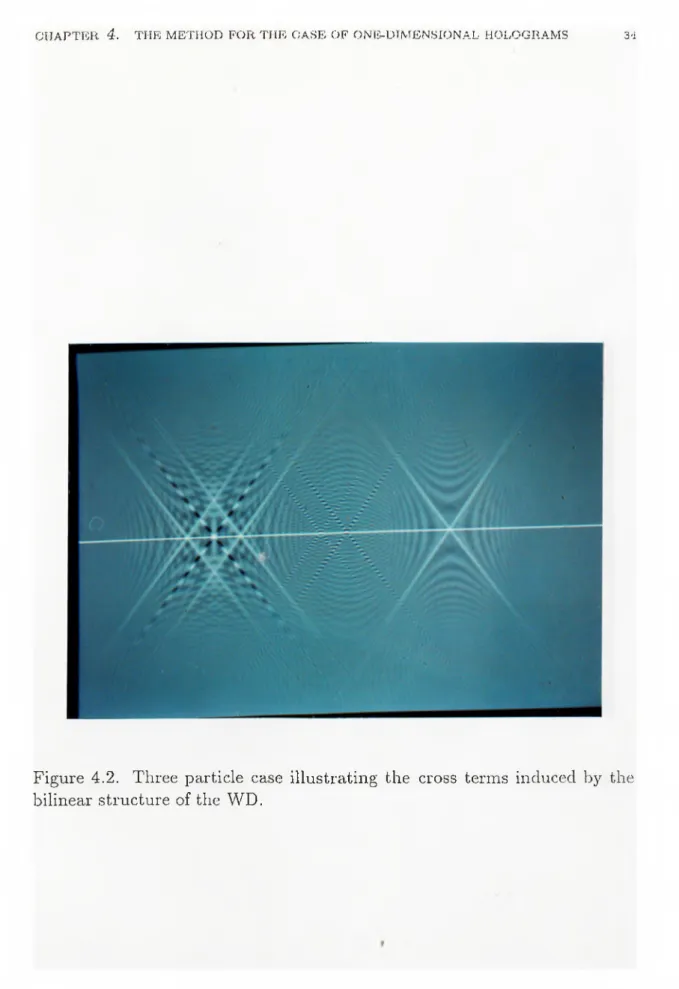
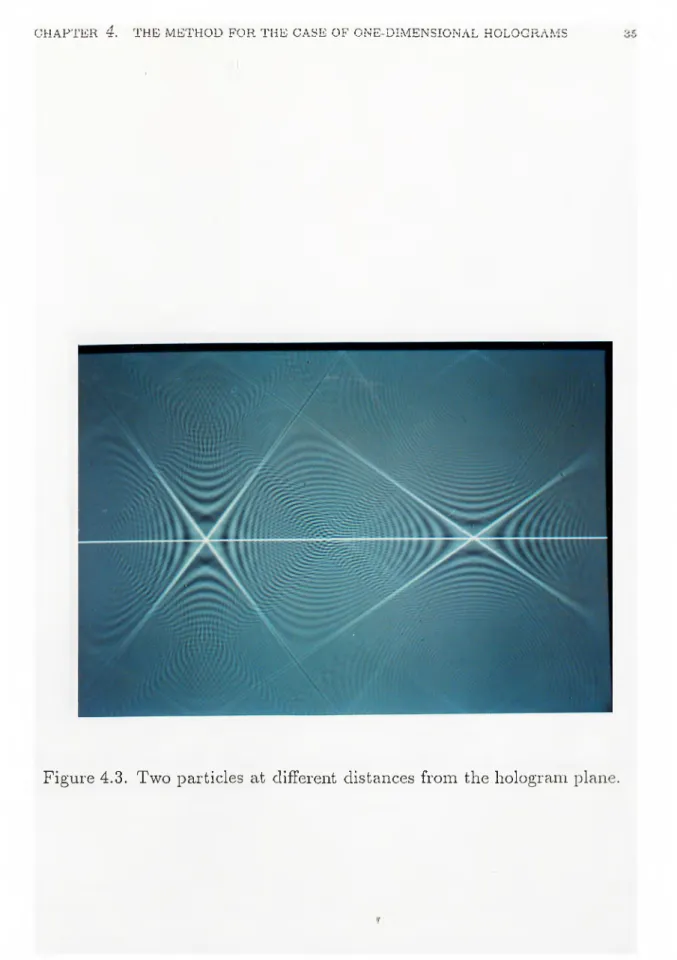
Şekil


Benzer Belgeler
In this study, the stress values on implants (von Mises stresses) and surrounding bone (Principal stress values) were evaluated on the four separate models where the implants
共Color online兲 Energy-band structures of individual Ba 共a兲 and Fe 2 As 2 layers 共b兲 together with the energy bands of the BaFe 2 As 2 crystal in Fmmm symmetry corresponding to
The lighting scheme in museums and art galleries differs in some important aspects from many other types of lighting design: many museum objects, often unique in size, shape,
The fact that the change in most preservice teachers ’ conceptual understanding of the phases of the moon and eclipses was durable almost two years after the instruction shows that
Yaprak Kaya (2015) resmi ilkokullarda görev yapan sınıf öğretmenlerinin görüşlerine göre örgüt kültürü ile örgütsel vatandaşlık davranışı arasındaki ilişkiyi
iment, we evaluate the anomaly detection performances of the algorithms on another financial data set, i.e., the Alcoa stock price data set [40]. In this data set, we have daily
Keywords: waterfront, coastline, critical delineation, critique of urbanization, material flows, material unfixity, urban edge, project, planetary space, port
選舉的激情過後,雙和醫院李婕寧臨床心理師教您如何面對失落 依稀記得,前兩年心理治療室裡走進了一位年約
