A review of discrete solutions of poisson, laplace, and wave equations
Tam metin
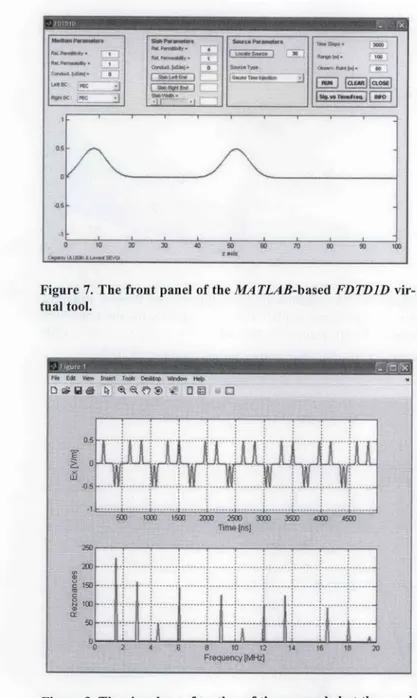
Şekil
Benzer Belgeler
We also propose two different energy efficient routing topology construction algorithms that complement our sink mobility al- gorithms to further improve lifetime of wireless
The results are expected to help exhibition designers and curators in increasing the consistencies between the planned and resulting schemes of attention distribution in both
It is important to recognize that the effects of oil price increases on out- put growth of individual countries are mostly positive. We do not find negative and
The dependent variables are the share of net interest margin (that includes foreign exchange related income and excludes interest revenues from securities portfolio) in total
Birinci ayın sonunda sap- tanan trombosit değerlerindeki azalma iki grup arasında farklı bulunmazken, üçüncü ayda PegIFN α-2a ve ribavirin alanlarda PegIFN α-2b ve
To the best of the author's knowledge, the extensive literature on compressive sensing has not considered the approach of the present paper, where an instance of a convex
While Islamic economics deliberately sought to set apart Islamic consumption values and practices from the Western consumer culture by denigrating the latter as wasteful, excessive
Baseline scores on the QLQ-C30 functioning scales from patients in both treat- ment arms were comparable to available reference values for patients with ES-SCLC; however, baseline
