H"-Performance Analysis of Robust Controllers
Designed for AQM'
Peng Yan
Dept. of Electrical Engineering
The Ohio State University 2015 Neil Ave. Columbus, OH 43210
yanp0ee.eng.ohio-state.edu
Abstract
It has been shown that the TCP connections through the congested routers with the Active Queue Management
(AQM) can be modeled as a nonlinear feedback system. In
this paper, we design
H"
robust controllers for AQM basedon the linearized TCP model with time delays. For the lin- ear system model exhibiting LPV nature, we investigate the
H--performance with respect to the uncertainty bound of
RTT(round trip time). The robust controllers and the corre- sponding analysis of H"-performance are validated by sim- ulations in different scenarios.
1 Introduction
Active Queue Management has recently been proposed in
[I] to support the end-to-end congestion control for TCP
traffic regulation on the Internet. For the purpose of alle-
viating congestion for IP networks and providing some no-
tion of quality of service (QoS), the AQM schemes are de-
signed to improve the Internet applications. Earliest efforts on AQM (e.g. RED in [2]) are essentially heuristic without
systematic analysis. The dynamic models of TCP ( [ 9 , 121)
make it possible to design AQM in the literature of feed-
back control theory. We refer to [ 1 I] for a general review of
Internet congestion control.
In [ 121, an TCP/AQM model was derived using delay dif-
ferential equations. They further provided a control theo- retic analysis for RED where the parameters of RED can
be tuned as an AQM controller [4]. In [ 5 ] , a Proportional-
Integral controller was developed based on the linearized model of [12]. Their controller could ensure robust stability
of the closed loop system in the sense of gain-phase margin
of the PI AQM [5, 61. A challenging nature in the design
of AQM is the presence of a time delay, which is called
R T T (round trip time). To further complicate the situation, the linearized TCWAQM model is linear parameter varying
(LPV), with RTT being the scheduling parameter. In the
'This work is ruppomd by the Nalional Science Fundation undergranl ZHitay Ozbay is on leave from The Ohio Stale University.
number ANI-0073725
0-7803-7896-2/03/$17.00 02003 IEEE
Hitay Ozbay*
Dept. of Electrical & Electronics Engineering
Bilkent University Bilkent, Ankara, Turkey TR-06533
present paper, robust AQM controllers are developed based
on the
H"
control techniques for SISO infinite dimensionalsystems [3, 151. We also analyze the
b'-
performance forthe robust controllers with respect to the uncertainty bound of the scheduling parameter RTT. Our results show that a
smaller operating range of RTTresults in better
H -
perfor-mance of the AQM controller, which indicates that switch- ing control among a set of robust controllers designed at se- lected smaller operating ranges can have better performance
than a single
H"
controller for the whole range.The paper is organized as follows. The mathematical model
of TCPIAQM is stated in Section 2, where the linearized
LPV system with time delays is described. In Section 3, An
H-
optimization problem is formulated, where the para-metric uncertainties are modeled and the robust controllers
are obtained. We investigate in Section 4 the
H"
perfor-mance of the robust AQM controllers. MATLAB simula-
tions are given in Section 5 to validate our design and anal-
ysis, followed by concluding remarks in Section 6.
'
2 Mathematical Model of TCPlAQM
In [IZ], a nonlinear dynamic model for TCP congestion control was derived, where the network topology was as-
sumed to be a single bottleneck with N homogeneous
TCP flows sharing the link. The congestion avoidance
phase of TCP can he modeled as AlMD (additive-increase
and multiplicative-decrease), where each positive ACK in- creases the TCP window size W ( f ) by one per R7T and a
congestion indication reduces W ( f ) by half. Aggregating N
TCP flows through one congested router results in the fol-
lowing TCP dynamics [ 12.61:
where R(f) is the RTT, 0
5
p ( f )5
1 is the marking proba- bility, q ( f ) is the queue length at the router, and C is the linkcapacity. Note
df)
R ( t ) = Tp
+
c
where T, is the propagation delay and q ( f ) / C is the queuing
delay.
Assume N ( t ) = N and C ( t ) = C , the operating point of (1)
is defined by
W
= 0Roc
WO = - N (3) L (4)-
W,2 ' PO =It can be shown that an uncertainty bound WZ(e,'*') satisfy- ing
IAPe(s)Js=jo
5
JWz(Bopel(s)J,T=jw V o E R' (12)WJeo'Ae)(s)
= a + b s + c s 2 (13)where a , b and c are defined in (35) (see the appendix for the
details of derivation). Note that once Bo and AB are fixed,
these coefficients are fixed.
Combining the robust stability and the nominal tracking per- formance condition, we come up with a two block infinite
dimensional
H -
optimization problem as follows:is
"
Minimize y, such that robust controller CO($) is stabilizing
Po(s) and
Let Sq := q
-
qo and 6 p := p - po. the linearization of ( I ) results in the following LPV time delay system, [ 6 ] ,K(B)e-"(@)s (14) (5) ~ 6q(s) ,- .- P&) =
S P ( 4
( r , ( e ) s + I)(TZ(B)S+ 1) where ~ 3 0 3 K(B) =-
4N2and 0 = R ( r ) E IT,,
T,
+qmyr/C] is the scheduling param-eter of ( 5 ) where q m m is the buffer size. Note that we em-
ploy
L{f(t,B)le=s}
= &(S) to describe theLPV dynamicequations in Laplace domain at fixed parameter values.
3
H"
Controller Design for AQMConsider the nominal svstem
where
So(.) = (1 +Po(s)co(s))-'
To($)
= 1 -So(s) = Pfl(s)Co(s)(l +Pfl(s)co(s))-',and
Wl
(s) = I/s is for good tracking of step-like referenceinputs.
By applying the formulae given in [I51 and [3], the optimal
solution to (14) can be determined as follows:
where
P5?
A ( s ) =
-
S
and F ( s ) is a finite impulse response (FIR) filter with time domain response
where 80 = Rg is the nominal
RTT.
We would like to designa robust AQM controller CO(S)
for
the nominal plant (10)so
wherethat
P = h
(i) Co(s) robustly stabilizes P&) for VB E
0
:= [BO-
AB, Bo
+
AB];(bz - 2QC)TZ - C 2
(ii) The closed loop nominal system has good tracking of the desired queue length q o which is a step-like signal.
-
with x the unique positive root of
Notice that the plant ( 5 ) can be written as b Z - 2 a c - a 2 $ (2ac - b2)$
+
c2X
c4.p
c4.p
x3
+
c*y* x -(?
-aZ)pe(s) =po(s)(l ape(^)) (11)
-
(U"
-a2
= 0 (19)where APe(s) is the multiplicative plant uncertainty.
Proceedings of the American Control Conference
The optimal
H"
performance cost y is determined as the largest root ofNote that an internally robust digital implementation of the
Hm
AQM controller (15) includes a second-order term which is cascaded with a feedback block containing an FIR filter F ( s ) . The length of the FIR filter is h(Oo)/T,, whereTs is the sampling period.
4 H"-Performance Analysis
As shown in Section 3, the
H -
AQM controller (15) is de-signed for Pe(s)Je=e, and allows for 8 € 0 =
[e
-
AO, 8+
Ae]. In this section, we would like to investigate the
H"-performance for the corresponding closed loop system, which indicates the system robustness and system response.
0, - A8 00 Oo
+
as... 0 4
C O ( S )
*... ...
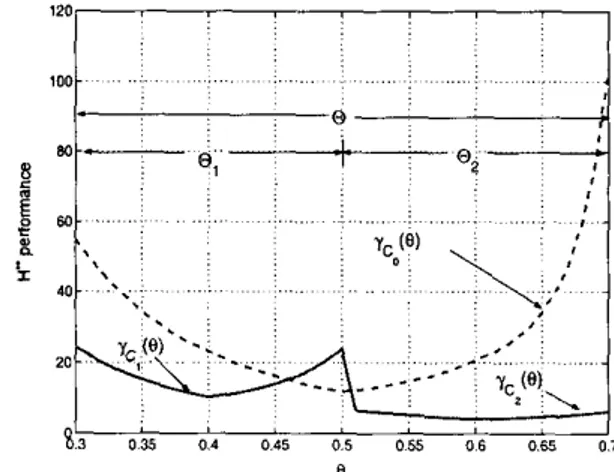
Figure 1: Partition of 0 by 01 and 02
Define the H"-performance of controller Co(s) with respect
to P&) as follows:
for any 8 E 0 = [eo
-
A8, 80+
Ae], whereS ( 4 = (1 +Pe(s)Co(s))-l, (22)
here the term IWi"Ae)(jo)Po(jw)/ can be seen as a bound
on the additive plant uncertainty. Furthermore, we define
which corresponds to the worst system response of con-
Notice that a smaller
6;
means better performance of therobust controller within the operating range 0.
Particularly, we are interested in the scenario depicted
in Fig.], where 0 is equally partitioned by 0 1 = [el -
troller CO(.) for plant P ~ ( s ) with V8 E [eo - A9, Bo
+
AQ].4191
A%, 8 1 + A 8 1 ] a n d 0 2 = [ e 2 - ~ e 2 , &+A82].withA81 =
A92 =
y .
For 8 Ee:,
i = 1,2, we designH -
con-troller Ci(s) obeying (15) with the nominal plant Pi($) :=
Pe(s)le=ei. Similar to (21) and(23), we have
for any
e
E Oi i = 1,2, andwhere Sj(s) = (1
+
P&)Cj(s))-' is defined similarly to(22).
In what follows, we provide numerical analysis of the
H -
performance with respect to the operating ranges and cor-
responding controllers shown in Fig.1. Assume N = 150,
C = 500, A8 = 0.2, and 00 = 0.5, the
H-
performanceyco(e) andyc,(O), i = 1,2canbenumericallyobtainedfrom
(21) and (24). As depicted in Fig.2, it is straightforward to
have
m a x ( c ' , e ) = 24.4
<
6;
= 104.4which means that the partition of Fig.] can improve system
performance in the sense of smaller
H-
performance cost.In fact, it is a general trend that
ma@>*)
<
Yg,
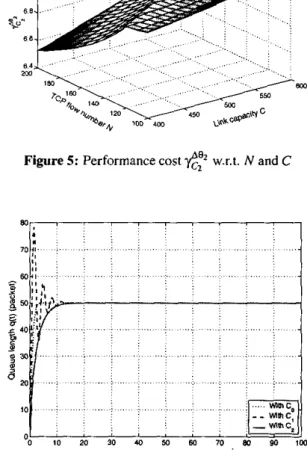
(26)which can be further verified by Fig.3, Fig.4, and Fig.5,
where N is chosen from 100 to 200, C from 400 to 600.
. . .
:
. . . . : ... .... . . . . 0 . . . . .... . . . I , 8.3 0 % 0.4 0.45 0.5 055 0 6 0.65 0.7Figure 2:
H-
performance with respect to f~Remark: Based on the observation of better performance
obtained by the partition shown in Fig.1, it is natural to
consider switching robust control among a set of
H"
con-trollers, each of which is designed for a smaller operating range. This will be an interesting extension of the present work.
Proceedings of the American Control Conference Denver. Colorado June 46. zoo3
Figure 3: Performance cost
$:
w.r.t. N and C . . . .... . . . . .. . . : ...., . . ,.. .. . Zi<"-
2d I 24 moFigure 4: Performance cost
y,!:'
w.r.1. N and C5 Simulations
The closed loop system with the determined controllers
is implemented in MATLABlsimulink to validate the con-
troller design as well as the
H -
performance analyzed inSection 4. We assume the TCP Row number N = 150. the
link capacity C = 500 packetslsec. The propagation delay
Tp is set to be 0.3 sec and the desired queue size is qo = 100
packets. Therefore, the nominal R 7 T is 0.5 sec (Bo = O S ) ,
which is straightforward from (2). We use AB = 0.2 in the
design of
CO(S)
and A01 = A02 = 0.1 inCl(s)
and CZ(S).The following three scenarios are considered:
Assuming the plant is the nominal one, i.e. Pe(s) =
Po(.). we implement controller Co(s) as well as CI (s)
and Cz(s). It is shown in Fig.6 that the three con-
trollers can stabilize the queue length because the
nominal value BO is within the operating range of 0,
01, and 0 2 . Note that the system response ofCO(.) is
better than the other two due to the fact that it achieves
the optimal
H -
perfomance at Bo.Assuming 6 = 00 - AB = 0.3, we implement con-
troller CO and Cl (CZ is not eligible in this scenario).
. . . . . . .. . . . . . . . .. . .
Figure 5: Performance cost
y,!?
w.r.1. N and Cllme I yecon@
Figure 6: System responses of CO, C, and C, at 0 = 0, = 0.5
As depicted in Fig.7, CO and C1 can robustly stabilize the queue length. Observe that the system response
of CI is better because it has much smaller
H -
per-formance cost, which has been shown in Section 4.
0 Similarly, w e choose 9 = Bo
+
AB = 0.7 and repeatthe simulation for controller CO and Cz (Cl is not el-
igible). As depicted in Fig.8. the two controllers can robustly stabilize the queue length and their system
responses coincide with the
H"
performanceanaly-
sis given previously.
The above simulations show that our robust AQM con-
trollers have good performance and robustness in the pres- ence of parameter uncertainties. Meanwhile, the system re-
sponses also affirm a good coincidence with the
ff-
perfor-mance analysis in Section 4.
Proceedings of the American Control Conference
Denver, Colorado June 4-6, 2003
€9 . . . . .. . ... . . 1 ..< ' . ' . . . . . . . . . . . . . . . . . . . . . . . . . . . m ; ~ 30. !
-
::.. . .. .. . . . . . . . . .E ' ; ; . :
a ;
s : . . : .
. . . : . . . . . . . . . . . .. .. . . . . . . . . I la=jo where I Ir=jo andFigure 8: System responses of CO and C2 at 0 = 00 +A0 = 0.7 ( T , P ) s + l)(TZ(e)s+ 1)
>
max(T;,T;)S 3 = j o
where
6 Concluding Remarks
which are straightforward from (7) and (8). Thus
We provided in this paper the guidelines of designing ro-
bust controllers for AQM, where the
H -
techniques for in-finite dimensional systems were implemented. The
H - -
performance was numerically analyzed with respect to
the hound of the scheduling parameter 8. It was shown
that smaller uncertainty bound could result in better
H"-
performance of the corresponding closed loop systems.
Simulations were conducted to validate the design and anal-
ysis. A challenging extension of the present work is to con-
('2.8) IAhI max(T;,T;) ' q e .T+I (r2(e)s+il
I(
;
s=jo Recallmi
:= TI(e)Tz(e)- ~ ~ ( e ~ ) ~ ~ ( e ~ )
-sider switching
H -
control, where the system performance - ( T I ( ~ o ) + A T I ) ( T z ( ~ o ) + A T z ) -TI(%)Tz(~o)can b e improved in a larger operating range. = ATIATz
+
TI (0o)ATz+
Tz(0o)ATt. (29)Proceedings of the American Control Conference Denver. Colorado June 4-6.2003
Invoking (27) and (28), we have IPe(s) -po(~)l.s=jo
References
[ I ] B. Braden, D. Clark,
I.
Crowcroft, B. Davie, S . Deer-ing, D. Estrin, S. Floyd, V. Jacobson, G. Minshall, C. Par- tridge, L. Peterson, K. Ramakrishnan, S . Shenker, J. Wro-
clawski, and L. Zhang, “Recommendations on queue man-
agement and congestion avoidance in the internet”, RFC
2309, April, 1998.
121 S. Floyd and V. Jacobson, “Random Early Detection
gateways for congestion avoidance”, I E E W A C M Trarisac-
tioris 011 Nerworkiirg, vol. 1, No. 4, August, 1993.
[3] C. Foias, H . Ozbay, and A. Tannenbaum, Robirsr
Corrtrol of lilfiriite Dimetisiorml Sysferi~s: Frequertcy Do-
main Methods. No. 209 in LNCIS, Springer-Verlag. 1996.
[4] C. Hollot, V. Misra. D. Towsley, and W. Gong, “A
control theoretic analysis of R E D , Proc. of I E E E INFO-
COM’OI, April, 2001.
IATiI IAT2l [SI C. Hollot, V. Misra, D. Towsley, and W. Gong, “On desienine imuroved controllers for AOM routers suvportinp
+
l A K l + K ( e a ) ( ~+ T?(eo)
PI1
K(e)max(T;,T;) I , . &, . . . .
TCP flows”, Proc. of I E E E INFOCOM’OI, April,
idol.
[6] C. Hollot. V. Misra. D. Towsley, and W. Gong, ‘Anal-
ysis and design of controllers for AQM routers supporting
TCP flows”, I E E E Trans. on Automatic Conrrol. vol. 47. DD.
(30) )
IATiATzJ + IATi
1
+
IATzI+
TI(eo)G(%) max(TI(%),Tz(eo)) Defining (CT,+
q n d 3 4N2’
K + := max{K(O),e t
[ T ~ , Tp+qrnm/C]} = and assumingthe additive uncertainty (30) can be rewritten as
IPe($)
-
S(s)l.v=jwI
A(eo,A8)(32)
With (11) and (32), the multiplicative uncertainty Ape(.)
can be bounded by
. .
945-959, June 2002.
[7] V. Jacobson and M. Karels. “Congestion avoidance
and control”, Proc. ofACM SlGCOMM’88, August, 1988.
[SI R. Johari and D. Tan, “End-to-end congestion control
for the internet: delays and stability”, I E E E / A C M Trans. on
Nehvorkiug, vol. 9. pp. 818-832, December, 2001.
191 E Kelly, “‘Mathematical modeling o f the Internet”,
Matlienlatics (irilimited-2001 and Beyond (Editors
B.
En- gquist and W. schmid), Springer-Verlag, Berlin, 2001[IO]
S.-H. Lee
and J.T.Lim,
“Switching control ofH”
gain scheduled controllers in uncertain nonlinear systems”,
Autotnaticn, vol. 36, pp. 1067-1074,2000.
[ I I ] S . Low, E Paganini, and J. Doyle, “Internet conges-
tion control”, IEEE Control Systeni Magazine. vol. 22. pp.
28-43,2002,
1121 V. Misra,
W.
Gong, and D. Towsley, “Fluid-basedanalysis of a network of AQM routers supporting TCP flows
with an application to R E D , Proc. ofACM SIGCOMM’OO,
September, 2000.
[I31 P.-E Quet, B. Ataslar, A. Iftar, H. Ozbay, T. Kang,
lAPe(s)ls=jo
5
A ~ e o , 4 e ) / P ~ ( s ) - ‘ / . , = j o = IWZ(Ba’Ae)(s)I.~=jo,-o>
”’)
(34)
and S . Kalyanaraman, “Rate-based flow controllers for communication networks in the presence of uncertain time-
varying multiple time-delays”, Arrromatica, vol. 38, pp.
1141 W. Rugh and J. Shamma, “Research on gain schedul-
ing”, Auromarica, vol. 36, pp. 1401-1425,2000.
[15] 0. Toker and H. Ozhay,
‘‘H-
optimal and subopti-mal controllers for infinite dimensional SISO plants”, I E E E
Trans. on Autoniatic Control, vol. 40, pp. 751-755, 1995.
where with 9 17-928, June 2002. W,(Bo’Ae) ( s ) = a
+
6s+
cs2 A(%,Ae) A ( e , , ~ e ) ( f i(eo) +
weo))
a = - - K(00) b = K(%) (35) A ( @ 0 , 4 e ) ~ l ( e 0 ) T 2 ( 0 0 ) c = K ( WProceedings of the American Control Conference