T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
ARAÇ PLAKA TANIMA SĠSTEMĠ Ali BAKKALOĞLU
YÜKSEK LĠSANS TEZĠ
Bilgisayar Mühendisliği Anabilim Dalını
Ağustos-2011 KONYA Her Hakkı Saklıdır
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
Ali BAKKALOĞLU 15.08.2011
iv
Ali BAKKALOĞLU
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Bilgisayar Mühendisliği Anabilim Dalı DanıĢman: Yrd. Doç. Dr. Mesut GÜNDÜZ
2011, 87 Sayfa Jüri
Yrd. Doç. Dr. Adem Alpaslan ALTUN Yrd. Doç. Dr. Ömer Kaan BAYKAN
Yrd. Doç. Dr. Mesut GÜNDÜZ
Otomatik Plaka Tanıma Sistemi, güvenlik, park yeri giriĢ, araç bilgilerine eriĢme gibi amaçlarla ihtiyaç duyulan bir sistemdir. Bu çalıĢmada, otomatik plaka tanıma sistemi gerçekleĢtirilmiĢtir. Otomatik plaka tanıma sistemleri 3 ana bölümden oluĢur. Bu bölümler: plaka yerinin tespiti, karakter ayrıĢtırma ve karakter tanıma iĢlemleridir.
Plaka yerinin tespiti için resim üzerindeki piksel değerlerinin değiĢim oranları incelenmiĢtir. Bu inceleme sonucunda plaka bölgesi tespit edilmiĢtir. Karakter ayrıĢtırma iĢlemi için resim üzerindeki sütun toplam vektör değerleri kullanılmıĢtır. AyrıĢtırılan karakterlerin tanınması için Ģablon eĢleĢtirme yöntemi kullanılmıĢtır. Bu 3 ana iĢlem sırasında, resimler iĢlenirken bilinen resim filtreleme fonksiyonları kullanılmamıĢtır. Bilinen resim filtreleri yerine doğrudan iĢlemin amacına yönelik algoritmalar yazılmıĢtır. Bu yöntemle, iĢlemin en hızlı Ģekilde tamamlanması sağlanmıĢtır. Bir resmin iĢlenme süresi, Celeron 2.8 Ghz iĢlemcili bir bilgisayarda ortalama 410 milisaniye sürmektedir. Bu sistem, 1500 araç resmi üzerinde test edilmiĢtir. 640x480 boyutlarındaki araç resimleri hareket halindeki trafikten 24 saat boyunca alınmıĢtır. Yapılan test iĢlemini sonucunda %89,4 baĢarı oranı elde edilmiĢtir. Alınan resimlerin kalitesi daha yüksek olursa baĢarı oranı çok daha yüksek olacaktır.
Anahtar Kelimeler: Görüntü ĠĢleme, Karakter Tanıma, Plaka Tanıma Sistemi, ġablon EĢleĢtirme
v
ABSTRACT MS THESIS
VEHICLE LICENSE PLATE RECOGNITION
Ali BAKKALOĞLU
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE IN COMPUTER ENGINEERING Advisor: Assist. Prof.Dr. Mesut GÜNDÜZ
2011, 87 Pages Jury
Assist. Prof. Dr. Adem Alpaslan ALTUN Assist. Prof. Dr. Ömer Kaan BAYKAN
Assist. Prof. Dr. Mesut GÜNDÜZ
Automatic License Plate Recognition is a system that is needed for purposes, such as security, parking lot entry, accessing vehicle information. In this study, implementation of an automatic license plate recognition system is introduced. The system comprises of three main processes which are; detection of license plate location, separation of characters and character recognition.
To detect license plate location, the change rates of pixel values are investigated. Hence, the region of the license plate is determined. Column sum vectors are utilized for character separation process. The template matching method is used to recognize separated characters. During the image processing stages in these three processes, conventional image filtering functions are not utilized. Novel algorithms are correspondingly produced to the aim of the situation. With this method, the process is completed as fast as possible. The average processing time of one image is 410 ms on a machine with 2.8 GHz celeron processor. This system is tested with 1500 car images. The car images with 640x480 resolution are taken from the real-time traffic during 24 hours. The accuracy rate of 89.4% is achieved as a result of test processes. The higher quality images are received, the higher accuracy rate is going to be achieved.
Keywords: Character Recognition, Image Processing, License Plate Recognition, Template Matching,
vi GÜNDÜZ‟e teĢekkürü bir borç bilirim.
ÇalıĢmam boyunca beni sürekli teĢvik eden ve yardımcı olan Raziye GELĠBOLU‟na, Inforce BiliĢim Teknolojileri‟ne ve çalıĢanlarına teĢekkürlerimi sunarım.
Eğitim hayatım boyunca yardımlarını ve desteklerini esirgemeyen aileme ve hocalarıma teĢekkürü bir borç bilirim.
Ali BAKKALOĞLU KONYA-2011
vii ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii KISALTMALAR ... ix 1. GĠRĠġ ... 1 2. KAYNAK ARAġTIRMASI ... 3
2.1. Plaka Tanıma Sisteminin Kullanım Alanları ... 3
2.2. Plaka Tanıma Sistemi Yöntemleri ... 6
2.3. Profesyonel Plaka Tanıma Sistemleri ... 9
3. PLAKA TANIMA ĠġLEMĠNDE KULLANILAN BAZI GÖRÜNTÜ ĠġLEME YÖNTEMLERĠ ... 11
3.1. Ġnsan Görme Sistemi ... 11
3.2. Dijital Görüntü ... 12 3.2.1. Ġkili görüntü ... 14 3.2.2. Gri seviyeli görüntü ... 14 3.2.3. Renkli görüntü ... 16 3.3. Histogram ... 17 3.4. Renk DönüĢümleri ... 18
3.4.1. Renkli resmin - gri seviyeli resme dönüĢümü ... 18
3.4.2. Gri seviyeli resmin - siyah beyaz resme dönüĢümü ... 19
3.5. Kenar Bulma ( Edge Detection ) ... 23
3.5.1. Roberts Cross kenar bulma yöntemi ... 24
3.5.2. Gradient operatörü ... 25
3.5.3. Laplacian operatörü ... 25
3.5.4. Sobel operatörü ... 27
4. MATERYAL VE YÖNTEM ... 30
4.1. Plaka Tanımada ĠĢlem Hızının Önemi ... 30
4.2. Plaka Tanıma Sistemi ve Algoritma Mantığı ... 30
4.3. Plaka Yerinin Tespiti ... 31
4.3.1. Literatürde kullanılmıĢ bazı yöntemler ... 31
4.3.2. Yeni bir yöntem arayıĢı ve sebebi ... 33
4.4. Tespit Edilen Plakadan Karakterlerin AyrıĢtırılması ... 44
4.4.1. Plaka bölgesindeki eğimin tespit edilmesi ve düzeltilmesi ... 45
4.4.2. Eğimi düzeltilmiĢ plaka üzerinde karakter parçalama iĢlemi ... 48
4.5. Karakter Tanıma ĠĢlemi ... 55 4.5.1. Karakterlerin boyutlandırılması ve karakter tanıma iĢlemine hazırlanması . 55
viii
6.1 Sonuçlar ... 72
6.2 Öneriler ... 73
KAYNAKLAR ... 75
ix
KISALTMALAR
Kısaltmalar
Bitmap: Programlama dilinde resim nesnesi
Byte Dizisi: Ġçinde 0-255 ve arasındaki değerleri barındıran matris dizisidir F(x,y): Ġki boyutlu resim matrisi
Gx: Kenar bulma operatörü yatay matris maskesi Gy: Kenar bulma operatörü dikey matris maskesi L, M, S: IĢık almacı tipi
LPR: License Plate Recognition (Plaka Tanıma)
Ms: Milisaniye
Nm: Nanometre
PYT: Plaka yerinin tespiti
PKA: Plaka karakterlerinin ayrılması PKT: Plaka karakterlerinin tanınması RGB: Red - Green – Blue
alınan resmin iĢlenerek üzerinden gerekli bilgilerin alınmasıdır. Bu sayede elektronik ortamdaki resimlerden istenilen görüntü sonuçları ve veriler elde edilir. Resim iĢleme günümüzde birçok alanda kullanılmaktadır. Resim iĢlemenin faydası, kontrol iĢlemleri için insan gücünün kullanımını azaltarak, bunun yerine 24 saat aralıksız çalıĢabilen ve de bir insana göre çok daha hızlı iĢlem yapabilen makinelere iĢleri devrederek, maddi yönden ve performans yönünden büyük kazanç sağlamasıdır. Fakat bir makine bir insan kadar zeki olamaz ve sağduyulu davranamaz, sadece kendisine öğretilen iĢlemleri çok hızlı bir Ģekilde yerine getirir.
Dijital ortamda resim iĢlemek bilgisayara ağır yük getiren bir olaydır. Fakat günümüzde bilgisayar teknolojisinin geldiği nokta düĢünüldüğü zaman, çok kısa sürelerde büyük miktarlarda veri iĢlenebilmektedir. Bu sayede resim üzerinden daha kısa sürede ve daha anlamlı veriler elde edilebilmektedir. Bir bilgisayarın birim zamanda yapabileceği iĢlem ne kadar çok artarsa, aynı zaman dilimi içinde resim üzerinde yapılabilecek incelemede o kadar detaylı olacaktır. Bu sayede daha tutarlı ve anlamlı sonuçlar üretilebilecektir.
Otomatik araç plaka tanıma sistemlerinde aracı belirlemek için hali hazırda araçların üzerinde olan plakalar kullanılır. Bu plakayla o anki aracın bilgilerine ulaĢılabilir ve bu aracın durumu (çalıntı, aranıyor, geçiĢ hakkı var, giriĢ yetkisi yok, vb. ) kontrol edilebilir. Bu sayede ek masraftan kaçınılarak mevcut verilerle iĢlem yapılmıĢ olur. Plaka tanıma sisteminin kayda değer baĢka bir faydası da sistemin çekilen fotoğrafları kaydedebilmesidir. Bu kaydedilen veriler daha sonra suçla (hırsızlıkla, dolandırıcılıkla, vb.) mücadele maksadıyla da kullanılabilecek bir veri halinde saklanır. GeliĢen görüntü iĢleme teknikleriyle sürücünün yüzü tanınabilir, emniyet kemerinin takılı olup olmadığını da kontrol edebilir. Bu sistemin diğer bir önemli avantajı da araçlara hiçbir eklenti gerektirmemesidir, bu yüzden sürücülere herhangi bir mali yük oluĢturmaz. Bu teknoloji park yerlerinde, trafik ıĢıklarında ve güvenlik gereken bölgelerde kullanılabilir. Ücretli otoyollarda, otoparklarda ve akan trafikte araçların takibi otomatik plaka tanıma sistemi sayesinde en iyi Ģekilde yapılabilir. Yurt dıĢındaki
araçların plaka yapıları Türkiye‟deki plaka sistemine yakın olduğu için yapılacak ufak format değiĢiklileriyle yurt dıĢında da kullanılabilecek bir sistemdir.
Gelecekte daha hızlı iĢlemciye sahip bilgisayarlar ve yüksek çözünürlüklü kameralar sayesinde plaka karakterleri dıĢında, araç içinde kaç kiĢi olduğu, emniyet kemerlerinin takılı olup olmadığı gibi kontroller yapılabilir. Araç içindeki kiĢilerin yüzleri de taranarak araç içindeki Ģahıslar da kontrol edilebilir. Bunun için resim kalitesinin yeterli olması gereklidir. GeçmiĢte plaka tanıma üzerine birçok araĢtırma yapılmıĢ ve çözümler bulunmuĢtur. Fakat bu araĢtırmaların çoğunda çeĢitli kısıtlamalar bulunmaktadır. Bunlar duran arabadan çekilen resimleri iĢlemek, sabit uzaklıkta bulunan araçtan çekilen resimleri iĢlemek, plakayı direk karĢıdan gören resimleri iĢlemek gibi sınırlamalardır. Bu resimleri iĢlemek için farklı yöntemler kullanılmıĢ ve hiçbirinde yüzde yüz sonuç alınamamıĢtır. Görüntü iĢleme, resim içinde bulunan binlerce bit üzerinde yapılan ağır bir iĢlemdir. ĠĢlemciler her ne kadar güçlü olsa da resim üzerinde bulunabilecek bütün plaka durumlarını ve özelliklerini kontrol etmek için yetersiz kalmaktadır. Örneğin gerçek zamanlı videodan 1 veya 2 saniyede bir resim alınabilir. Alınan resimler üzerinde bulunan araçların, hızlı bir Ģekilde plakaları tanımlanmalıdır. En büyük maliyet sorunu zamandır. Dört veya beĢ saniyelik bir zaman diliminde resim üzerinde birçok kontrol gerçekleĢtirilebilir ve bu sistem de plaka tanıma sistemi olarak kullanılabilir. Böyle yavaĢ çalıĢan bir sistemin kullanım alanları kısıtlıdır. Apartmanın otopark giriĢinde, arabayı yanaĢtırdıktan 5 sn sonra kapının açılması çok büyük bir sorun değildir, ama hareket halinde olan bir trafikte bu sistem kullanılamaz. Sürekli araç geçiĢi devam eden trafikte, ilk alınan resim tanımlanırken 5 saniye zaman geçecek ve bu tanımlama iĢlemi sırasında kamera önünden geçen diğer arabaların resimleri alınamayacaktır. Bu çalıĢmada amaç, bir resmi en kısa sürede tanımlayarak bir sonraki resmi iĢlemeye baĢlamaktır. Bir resim iĢleme süresi 50 milisaniye sürerse, 1 saniyede 20 resim iĢlenebilir. Bu sayede hareket halindeki trafikte bulunan bütün araçlar kaçırılmadan plakaları tespit edilebilir.
plakaların tanımlanmasında değil ilave yazılımla araçların sayılmasında da etkin Ģekilde kullanılabilir. Bu sayede trafiğin yoğun olduğu bölgeler tespit edilebilir ve sürücüler baĢka bir yola yönlendirilebilir. Köprü giriĢlerinde geçiĢ yapan araç sayısı ve köprünün diğer ucundan çıkıĢ yapan araç sayısı arasındaki fark, köprü üzerinde kaç araç bulunduğu gösterir. Köprü yoğunluğa göre araçlar, feribot veya baĢka bir ulaĢım yoluna yönlendirilebilir.
Plaka tanıma sistemiyle, Ģirket otoparkına giriĢ çıkıĢ yapan araçlar veri tabanına kayıt edilir ve gerektiğinde bu veriler analiz edilebilir. Analiz sonucu, kimin iĢe ne zaman geldiği ve ne zaman gittiği hesaplanabilir. ġekil 2.1 de bir Ģirket otoparkında kullanılan otomatik plaka tanıma sisteminin kamerası görülmektedir.
ġekil 2.1. Park Yeri Kontrol Sistemi
Otoparklar için kullanılarak, aracın otopark içinde kalma süresi ve ücreti otomatik olarak hesaplanabilir. MüĢteri bilgileri de kayıt edilerek aylık abonelik iĢlemleri çok rahat bir Ģekilde yürütülebilir. Örneğin, kontör sistemi getirilerek, otopark içinde 100 saat bekleme süresi önceden satın alınarak, aracın otopark içinde beklediği
her saat için kontörler otomatik olarak düĢebilir. Bu kontrolü otomatik değil de bir kiĢiyi park giriĢine oturtarak yapmak oldukça zordur ve maliyeti yüksektir. Plaka tanıma sistemiyle, oldukça yoğun çalıĢması gereken ve süre hesaplayan çalıĢanlara ücret ödenmesine gerek kalmayacak, sistemin kendisi otomatik kontrol ve hesaplama yapacaktır.
ġekil 2.2. Plaka Tanıyan Bariyer Sistemi
ġekil 2.2 ve ġekil 2.3 de görüldüğü gibi giriĢ kontrolleri için otomatik plaka tanıma sistemleri kullanılarak, tanımlanan plakalar için kapı otomatik açılabilir. Apartman garaj kapıları açmak için genelde kullanıcıların her birine uzaktan kumanda dağıtılması gerekir. Fakat plaka tanıma sisteminde araçlar için ekstra hiçbir maliyete gerek yoktur. Çünkü bütün araçlar kimlik olarak kullanılabilecek plakaları taĢımaktadır. Yapılan giriĢ çıkıĢ iĢlemlerinin görüntü kayıtları tutularak hem park giriĢinin kameralı güvenliği sağlanır, hem de elde edilen istatistikler istenilen amaç doğrultusunda kullanılabilir.
ġekil 2.3. Otopark GiriĢi
ġekil 2.4 de görüldüğü gibi paralı geçiĢ sistemlerinde kullanılarak, sistemde kayıtlı olan arabaları uzun süre bekletmeden, plakaları tanımlandıktan sonra direk geçiĢlerine izin verilebilir. Bu sayede trafiğin aksaması önlenir ve de kontur sistemi getirilerek toplu geçiĢ hakkı satın alma imkânı sağlanabilir.
ġekil 2.4. Otoban GiriĢ Kontrolü
Sınır kontrolleri için kullanılarak, araçların ülkeye giriĢ saatleri kaydedilebilir. Bu sayede aracın ne kadar süre ülkede kaldığı otomatik olarak hesaplanabilir. Ayrıca
plaka bilgileriyle pasaport bilgilerinin bağlantılı olduğu bir sistem kullanılırsa, sınırda bekleme süresi azalır, bu sayede sınır kapısında sıkıĢıklık giderilmiĢ olur.
Çalıntı ve ya suçlu olarak sistemde kayıtlı bir araba, plaka tanıma sistemine yakalandığı an polis teĢkilatına haber verilebilir. Hatta suç durumuna göre sistem otomatik mesaj atarak yine suçluyu bildirip gereken birimlere alarm gönderebilir. Bu sayede suçlular çalıntı arabayla rahatça gezemezler, daha kısa sürede yakalanabilirler.
Ceza uygulamaları için kullanılarak, hız ihlali yapan ve ya kırmızı ıĢıkta geçen arabalar tespit edilebilir. Bu yöntem yaygın olarak kullanılmaktadır. Kesilen ceza otomatik olarak sisteme girilerek, kural ihlali yapan kiĢiler cezalarını internet üzerinden takip ederek ödeme yapabilir, bu sayede otomatik iĢleyen ve maliyeti düĢük bir sistem oluĢturulmuĢ olur.
Güvenlik Ģeritlerine kamera konularak, güvenlik Ģeritlerini ihlal eden araçlar tespit edilebilir ve para cezası otomatik olarak kesilebilir.
AlıĢveriĢ merkezlerinin park alanlarında kullanılarak sık sık alıĢveriĢ yapan ziyaretçilerin listesini derlemekte ve toplam giriĢ sayılarına göre trafik profilinin oluĢturulmasında kullanılabilir.
Havaalanı otoparklarında kullanılarak, plaka bilgisi ve araba görüntüsü alınabilir. Havaalanlarında araçlar daha uzun süre beklediği için verilen biletlerin kaybolma ihtimali yüksektir. Hava alanında park ücretleri yüksek olduğu için sahtekârlık olayları da görülebilir. Bunun önüne geçmek için tespit edilen plaka bilgisi ve kanıt olarak gösterilen parkta duran araba resmiyle park bileti olmadan da park ücreti tespit edilebilir ve kanıt olduğu için kiĢinin itiraz hakkı bulunmaz.
2.2. Plaka Tanıma Sistemi Yöntemleri
Plaka Tanıma sistemleriyle ilgili geçmiĢte birçok çalıĢma yapılmıĢtır. Bu uygulamalarda karĢılaĢılan sorunlar resmin akĢam çekilmesi, plaka bölgesine güneĢ ıĢığı veya gölge gelmesi, plaka bölgesinin kirli olması, plaka üzerinde cam koruma bulunması, plaka karakterlerinin üzerinde vida bulunması ve hava durumu gibi birçok etken bulunmaktadır. Bu zorluklardan dolayı doğru bir sonuca gidilmesi güçleĢmektedir ve resim üzerinde plaka tanıma iĢlemi zorlaĢmaktadır. Tipik bir plaka tanıma sistemi 3 parçadan oluĢur. Bunlar;
kullandığı bir araç plaka tanıma sistemi geliĢtirmiĢtir. Algoritması hakkında bilgi verilmeyen sistemin baĢarı oranı % 93 olarak belirtilmiĢtir(Williams ve ark. 1989).
2000‟li yıllarda öğrenme tabanlı plaka tanıma sistemi kavramının baĢarısı görülmüĢ ve bilimsel çalıĢmalarda kullanılmaya baĢlanmıĢtır. Kim ve ark. (2000) öğrenme tabanlı plaka tanıma sistemi çalıĢmalarında araba tespitinde %90, plaka tespitinde %88 ve karakter tespitinde %85 oranında baĢarı elde etmiĢlerdir.
Wang ve Lee (2003) plaka yeri tespitinde plaka zemini ve karakterlerin renklerinden yararlanmıĢtır. Karakter tanıma iĢleminde ise Template Matching denilen birebir karĢılaĢtırma iĢlemi kullanılmıĢtır.
Yanamura ve ark. (2003) yaptıkları çalıĢmada, videodan alınan görüntü dikey ve yatay düzlemde Sobel filtresinden geçirilmiĢtir. Elde edilen görüntü üzerindeki gürültüler yok edilmiĢtir. Ġmgedeki doğruları bulmaya yarayan Hough dönüĢümünü ve plaka en boy oranı kullanılarak plaka bölgesi tespit edilmiĢtir.
Hamey ve Priest (2005) Avusturalya plakalarının renk ve Ģekil özelliklerinin farklılığını kullanarak plaka yeri tespitinde baĢarılı sonuçlar elde etmiĢlerdir. Kullandıkları algoritmada resim içerisindeki plaka aday bölgeleri teker teker karakterler okununcaya kadar kontrol edilmektedir ve bu sistem için bir handikap oluĢturmaktadır.
Wu ve ark. (2005) tarafından Çin güney sahilindeki bulunan Macao tarzı plakalar için deneysel bir plaka tanıma sistemi üzerine çalıĢılmıĢtır. Plaka belirlemek için yapısal iĢlemler ve izdüĢümü arama algoritması kullanılmıĢtır. Ġmgenin morfolojik açılması ile imgenin farkı alınarak yatay ve düĢey tarama yöntemiyle plaka bölgesini tespit edilmiĢtir. Plaka bölgesi bulunduktan sonra karakterleri ayırmak için dikey bir izdüĢüm yapılmıĢtır. ġablon eĢleĢtirme yöntemi kullanılarakta karakter tanıma iĢlemi gerçekleĢtirilmiĢtir.
Qin ve ark. (2006) plaka yerini tespit etmek için, plakanın belirgin özellikleri olan kenar ve köĢe noktalarını tespit etme yöntemini kullanarak %95 baĢarı oranı elde etmiĢlerdir.
Hakan Caner (2006) gömülü sistem olarak adlandırılan Mikrobilgisayar (FPGA vb.) donanımı kullanarak akan video üzerinde plaka tanıma sistemi gerçekleĢtirmiĢtir.
Plaka alanını bulabilmek için Gabor filtre, yatay yönde geniĢletme, eĢikleme ve Bağlantılı BileĢenler Analizi (BBA) kullanılmıĢtır. Tespit edilen plaka bölgesi birbirinden ayrı karakterlere bölütlenerek karakter tanıma sistemi için hazır hale getirilmiĢtir. AyrıĢtırılan karaterler Öz Düzenlemeli Harita (Self Organizing Map(SOM)) kullanılarak tanınmıĢtır. BaĢarı oranı %87 olarak belirtilmiĢtir.
Emre ÇamaĢırcıoğlu (2007) yapılan çalıĢmada plaka yerinin tespitinde plaka zemin rengi ve plaka karakterlerinin renginden yararlanılmıĢtır. Karakterlerin ayrıĢtırılmasında sütun toplam vektörü(stv) kullanılarak, resimdeki imza bölgesi araĢtırılmıĢtır. AyrıĢtırılan karakterler, ileri beslemeli, eğitim için geri yayınım algoritması kullanılan yapay sinir ağı (YSA) ile tanınmıĢlardır. ÇalıĢma içerisinde sistemin genel baĢarı oranı yer almamaktadır.
Beytullah Yalım (2008) yaptığı çalıĢmada taĢıt plakalarının yerlerinin bulunabilmesi için yeniden boyutlandırma, gri seviyeye indirgeme, Histogram eĢitlemesi, Thresholding, Smearing algoritmalarından oluĢan karma bir sistem tasarlanmıĢ ve bu algoritmalar morfolojik filtreleme yöntemleri ile birbirlerini tamamlayacak Ģekilde entegre edilmiĢlerdir. Plakanın okunması iĢleminde ise morfolojik filtrelemeler, Ģablon eĢleĢtirme ve tümevarımsal öğrenme yöntemleri kullanılmıĢtır. Uygulamanın baĢarım oranı %92,5 olarak gösterilmiĢtir.
Gözde Yavuz (2008) yaptığı çalıĢmada plaka alanını belirlemek için çizgiye dayalı metot kullanmıĢtır. Çizgiye dayalı metot, araba görüntüsünün enine kesitini gözlemlemeye dayanmaktadır. Enine kesit plaka numarası alanını kestiği zaman plaka alanı tespit edilir. Tespit edilen plaka bölgesindeki karakterleri ayrıĢtırmak için yatay bölünme, dikey bölünme ve karakter seçimi iĢlemleri uygulanmaktadır. AyrıĢtırılan karakterler tanıma iĢlemi için Ģablon eĢleme yaklaĢımı kullanılmıĢtır. Sistemin baĢarı oranı, sırası ile plaka bölgesi tespitinde %92, plaka karakterlerinin ayrıĢtırılmasında %95 ve plaka karakterlerinin tanınmasında %90 olarak belirtilmiĢtir.
Kayhan Bora (2009) tarafından yapılan çalıĢmada plaka görüntüsünden karakterlerin ayrıĢtırılması ve ayrıĢtırılan karakterlerin tanınması üzerine çalıĢılmıĢtır. Yapay sinir ağları veya karmaĢık matematiksel iĢlemler yerine insan gözü ile karakterin nasıl algılandığına dikkat edilmiĢtir. Plaka görüntüsü ikili sisteme çevrilmiĢ ve sonra dikey ve yatay doğrultularda taranarak karakterlerin sınırları bulunmuĢtur. Bulunan karakterler soldan sağa, sağdan sola, yukarıdan aĢağıya, aĢağıdan yukarı taranarak her bir karakter için özellik sınıfları oluĢturulmuĢtur. Daha önceden karakterler için hazırlanmıĢ olan özellik sınıfları veritabanı ile karakterin özellik sınıfı karĢılaĢtırılmıĢtır.
kullanılarak elde edilen plaka bölgesinden karakterler ayrıĢtırılmıĢ ve ileri beslemeli geri dönüĢümlü çok katmanlı perseptron yapay sinir ağı kullanılarak karakter tanıma iĢlemi gerçekleĢtirilmiĢtir. Sistemin genel baĢarı oranı %95,36 olarak belirtilmiĢtir.
Bahsedilen bu çalıĢmalar dıĢında, bu yöntemlere benzer birçok çalıĢma yapılmıĢtır. Plaka yeri belirlemek için kullanılabilecek diğer bir yöntem, direk olarak plaka içindeki karakterlerin yer tespitiyle plaka bölgesinin bulunmasıdır. Bu yöntemde resim yatay bir Ģekilde çizgilerle taranır, taranan çizgiler üzerindeki piksel değiĢimleri incelenir ve karakter olma ihtimali bulunan bölgeler iĢaretlenir. Bu tezde önerilen plaka bulma yöntemi, resim üzerinde direk olarak plaka karakterlerinin aranma yöntemi kullanılarak yapılacaktır. En büyük avantaj, resmin tüm histogramının önceden çıkarılmasına gerek kalmadan karakter tarama iĢleminin yapılacak olmasıdır. Bu durumda, Ģimdiye kadar yapılmıĢ birçok çalıĢmadaki gibi resmi belirli resim iĢleme filtrelerden geçirmek için de zaman kaybetmemiĢ olunmaktadır.
2.3. Profesyonel Plaka Tanıma Sistemleri
Dünyada ticari olarak plaka tanıma sistemi tasarlayan ve ürün olarak satan birçok firma bulunmaktadır. Yavuz (2008), Tomasetti ve ark. (2008) tarafından hazırlanan bu firmaların bazılarını aĢağıdaki gibi yayınlamıĢtır.
Çizelge 2.1. Profesyonel plaka tanıma sistemleri (Yavuz, 2008)
Firma Ürün adı
AITEK Srl TarGet
Alphatech Inc. Argus; VES (Violation Enforcement System) Amano Cincinnati, Inc. LPR (License Plate Recognition System) American Traffic Systems, Inc. AutoPass/AutoScan
AutoVu Technologies, Inc. AutoTrace
Belgian Advanced Technology Systems
CIS (Car Identification System)
ECM Inc. Neuroplak
Elettronica Santerno SpA. SIRIO
Federal APD, Inc. License Plate Inventory
Fornix Information Technologies Carina
Fraunhofer-Institute ISYPLATE
Gevis Video Identifizierungs- Systeme
VIS1000 (Video Identification System) Hi-Tech Solutions LPR (License Plate Reader); SEE/CAR Hughes Transportation
Management
Video-Tag
MAZ Hamburg GmbH MAZ-VIS (Vehicle Identification System) Monitron International Ltd. Number Plate Recogniser
Neurotechnologija Ltd. CIS (Car Identification System) Non-Cooperative Target
Recognition Ltd.
VIA
OMRON Corporation Automatic Vehicle Identifier Optasia Systems Pte Ltd IMPS (Integrated Multi-Pass System) Parsytec Computer GmbH Ruggedized ID-Recognition Systems
Perceptics Corporation LPR (License Plate Reader)
R&H Systems BV KEVER
Racal Messenger Ltd. Talon
R.B. TEC Ltd. CMPS (Car Plate Matching System) Redflex Traffic Systems Pty Ltd. TCO (Automated Traffic Camera Office)
Siemens Traffic Controls Ltd. ARTEMIS-IC
Telematica Systems Ltd Automatic Number Plate Recognition
Telstra Applied Technologies Safe-T-Cam
Visual Image Dynamics Ltd. ANPR (Automatic Number Plate Reader)
Evrendeki ıĢık kaynakların hepsi aynı türden ıĢık yaymazlar. ġekil 3.1 de görüldüğü gibi bu ıĢınlar dalga boylarına göre sınıflandırılır. Bu dalga boyları geniĢ bir yelpazeye sahiptir. En küçük dalga boyu ile en büyük dalga boyu arasında 1025 katlık bir oran bulunmaktadır. Fakat güneĢin yaydığı ıĢın boyları bu ıĢık yelpazesinin ufak bir kısmını kapsamaktadır. GüneĢ'ten yayılan farklı dalga boylarının % 70'i, 0.3 mikronla 1.50 mikron arasındaki daracık bir sınırın içindedir. Bu aralıkta güneĢin yaydığı üç tür ıĢık vardır: Görülebilir ıĢık (0.40 -0.70 mikron arasında), kızılötesi ıĢınlar (güneĢten gelen kızılötesi ıĢınlar 0.30-0.40 mikron aralığında) ve morötesi ıĢınlar (güneĢten gelen morötesi ıĢınlar 0.70-1.50 mikron aralığında) dır (Anonim 2003).
Ġnsan gözünün görebildiği ıĢık, 400-700 nm dalga boyları arasındaki küçük bir elektromanyetik alandadır (insan ortadaki dalga boylarına daha duyarlıdır). Tek bir dalga boyunun ıĢığı karakteristik bir renge sahiptir, farklı dalga boylarındaki ıĢığın karıĢımı zengin bir renk aralığı yaratır. Örneğin mor renk kısa ve uzun dalga boyundaki ıĢık karıĢımından, beyaz tüm dalga boylarının karıĢımından oluĢur.
Yaygın bir teoriye göre gözümüzdeki hücreler uzun (kırmızı), orta (yeĢil) ve kısa (mavi) dalga boylarını algılayabilecek üç farklı tipte, ıĢığa duyarlı almaçlar(pigment) içermektedir (Maxwell 1860). Bu almaçlar aĢağıda listelenmiĢtir.
L tipi almaçlar: Uzun dalga boyuna sahip renklere duyarlıdır. M tipi almaçlar: Orta dalga boyuna sahip renklere duyarlıdır. S tipi almaçlar: Kısa dalga boyuna sahip renklere duyarlıdır.
Resim çeken cihazlarda LMS tipi almaçlar kullanılır.
Uzun dalga boyu almaçları kırmızı renk tonlarını Orta dalga boyu almaçları yeĢil renk tonlarını
Kısa dalga boyu almaçları mavi renk tonlarını algılar.
Bu renk tonlarının üzerine birde parlaklık tayfı eklenerek görüntü elde edilir. Resim çeken kameranın sensör hassasiyetine göre farklı görüntü sonuçları elde edilir.
Görülebilir renklerin çoğu nesnelerin yüzeyinden yansıyan ıĢıktır. Yüzeyler ıĢığı farklı yollarla yansıtır, örneğin bir elmanın parlak yüzeyi farklı bir kırmızı yansıtır. Aynı zamanda üzerine düĢen ıĢığa bağlı olarak parlak bir ıĢık yansıması gösterir. Bu ayna gibi yansımalar yüzeyin düzgünlüğüne bağlıdır.
3.2. Dijital Görüntü
Görüntü ekran üzerinde gösterilmek için piksel denilen çok küçük noktalardan oluĢmuĢtur. Bu piksellerin her biri bir renk sunar. F(x,y) 2 boyutlu uzayda pikseller bir araya gelerek görüntüyü oluĢturur. 400x600 çözünürlükte ayarlanmıĢ bir ekranda görülen görüntü 400x600 tane pikselden oluĢmuĢ bir dijital görüntüdür.
ġekil 3.2. Dijital Resim Yapısı
ġekil 3.2 ile resimde piksel tanımı daha rahat anlaĢılabilmektedir. Resim ölçüleri 435x257 olan resim x ekseni boyunca 435 pikselden, y ekseni boyunca 257 pikselden oluĢuyor. Resim toplamda 435x257 pikselden meydana gelmektedir.
Bir resim üzerinde, santimetrekareye düĢen piksel sayısı artıkça görülen resmin netliği ve kalitesi buna bağlı olarak artar. 2400x2400 pikselden oluĢan bir resme çok kaliteli veya kalitesiz görüntüye sahip diyemeyiz. Çünkü bu resmi 10 cm2
bir alanda gösterecek olursak, cm2
düĢecek piksel sayısı 240x240 tane piksel olacaktır. Ġnsan gözü buradaki pikselleri birbirinden ayırt edemez ve resmi bir bütün olarak görür. Buradaki resim üzerinde kaliteden bahsedebiliriz. Fakat aynı resmi 50 m2
bir alanda yine 2400x2400 piksel Ģeklinde gösterirsek yaklaĢık olarak 2 cm2
alana bir piksel sığar. Bu resme yakından bakan birisi hiç güzel bir görüntü ile karĢılaĢamaz. Çünkü pikselleri ayırt edebilmektedir ve resim bütünlüğünü yakalayamaz. Fakat çok uzaktan bu resme bakıldığı zaman yine pikseller ayırt edilemez ve resmin bütünlüğüne odaklanılır. ġekil 3.2 de bu durum gayet net bir Ģekilde anlaĢılabilir.
Bir piksel koordinat ve rengiyle belirlenir. Piksellerin sahip olduğu renk durumuna göre 3 çeĢit görüntü vardır (Bora 2009);
-Ġkili Görüntü
-Renkli Görüntü
3.2.1. Ġkili görüntü
Ġkili görüntüde resim(imge) siyah ve beyaz renkten oluĢur. Bu resimde pikseller ya siyahtır ya da beyazdır, ara renkler ve grinin tonları kullanılmaz. Görüntüde pikseller 0 veya 1 olarak kodlanmıĢtır. Bu Ģekilde 0 ve 1 ile kodlanmıĢ piksellerden oluĢan görüntülere ikili görüntü adı verilir (Bora 2009). Ġkili görüntüye bir örnek ġekil 3.3 gösterilmiĢtir.
ġekil 3.3. Ġkili resimden görüntü ve Resmin ilk 10x10 piksellik alanının renk bilgileri 3.2.2. Gri seviyeli görüntü
Burada ikili resme göre ilave olarak ara renkler yani grinin tonları da kullanılır. Burada tonlar kodla ifade edilir ve her rengin bir kod olarak karĢılığı vardır. Bu kodlar 0‟dan baĢlar ve 255‟e kadar devam eder. Genelde parlak beyaz 0 olarak alınır ve koyu siyah da 255 değerini alır diğer tonlar bu kod değerleri arasında bir sayıyla ifade edilir (Bora 2009). Renklerin kod karĢılıkları bu Ģekilde olabileceği gibi tam terside olabilir.
Gri resimler için her bir pikselin alabileceği en büyük değer 255 ve en küçük 0‟dır. Gri seviyeli görüntüye bir örnek ġekil 3.4 de gösterilmiĢtir.
3.2.3. Renkli görüntü
Gerçek ve esas olan görüntü renkli görüntüdür ve burada milyonlarca tonda farklı renk vardır. Görüntüde her bir piksel için R (Kırmızı), G (YeĢil), B (Mavi) olarak kodlanmıĢ ayrı değerler tutulur. Her pikseli temsil etmek için kullanılan bitlerin sayısı piksel derinliği olarak adlandırılır. Piksel derinliği 24 bit olan bir resimde, her R (Kırmızı), G (YeĢil) ve B (Mavi) için 8 bit ayrılmıĢtır ve bunların her biri 0 ile 255 arasında değiĢen değerler alırlar (Bora 2009). Bir piksel için kullanılabilecek renk sayısı 255x255x255= 16,777,216‟ dır. Kırmızı, yeĢil ve mavi ana renk bileĢenlerinin her biri ayrı ayrı 3 farklı matriste tutulur. Bu üç matrisin bir arada, üst üste görüntülenmesi ile gerçek renk bileĢenleri meydana gelir. Renkli görüntüye bir örnek ġekil 3.5 de gösterilmiĢtir.
ġekil 3.5. Renkli resimden görüntü ve Resmin ilk 10x10 piksellik alanının RGB katmanındaki renk bilgileri
olmaktadır.
Histogram, bir veri setindeki verilerin dağılımını ve ya baĢka bir deyiĢle kullanım sıklığını ya da frekansını gösteren bir tablodur denilebilir (Gonzalez 1987). Gri seviye bir resim üzerinde histogramdan bahsedecek olursak, gri resim üzerinde 0 ile 255 arasında bulunan renklerin toplam değerlerini grafik halinde gösterebiliriz. Bir resmin histogram dağılımına ġekil 3.6 da örnek verilmiĢtir.
3.4. Renk DönüĢümleri
Gerçek renk bileĢenlerine sahip bir görüntü üzerinde iĢlem yapmak oldukça zordur. Çünkü her piksel üzerinde 24 bitlik bir veri vardır ve bunlarla ilgili matematiksel iĢlemler yapmak çok fazla zaman kaybına sebep olur. Bu yüzden görüntüleri iĢlemek için resimleri gri seviyeye hatta daha hızlı iĢlem yapabilmek için siyah beyaz resim formatına dönüĢtürmek gerekir. Her pikselde sadece 1 veya 0 bilgisini alarak iĢlem yapmak çok daha hızlı olur. Yine renkli bir resmin, siyah beyaz bir resme göre bilgisayar belleği üzerinde kaplayacağı alan çok fazladır. Bu veriler incelenmek için sürekli iĢlemciye gönderilip, buradan iĢlenmiĢ verinin tekrar alınacağı da düĢünülürse, siyah beyaz görüntü oldukça avantajlı duruma gelir. Fakat siyah-beyaz resim ile renkli resim arasından çok büyük detay farkı vardır. Bu yüzden yapılacak iĢleme göre resmin dönüĢtürüleceği format iyi seçilmelidir.
3.4.1. Renkli resmin - gri seviyeli resme dönüĢümü
Renkli bir resim ile gri seviye bir resim arasındaki fark, renkli resmin bir pikselinde 3 farklı renk yani 3 farklı değer tutulurken, gri seviyede sadece tek bir değer tutulmasıdır. Bu 3 farklı 0 ile 255 arasında değiĢen değerleri tek bir 0 ile 255 arasında değiĢen değer haline getirmek gerekir.
Bunu için en basit yol bu 3 değerin toplanarak, 3‟e bölünmesidir. Bu sayede 3 farklı değer tek değer haline getirilmiĢ olur. EĢitlik 3.1 kullanılarak gri seviyeli görüntüye çevrilmiĢ resim ġekil 3.7 de gösterilmiĢtir.
Y = (R (Kırmızı)+ G (Yeşil)+ B (Mavi) )/3 EĢitlik 3.1
görülebilen ıĢık dalga boylarının orta kısmında yer almaktadır. YeĢil renkten sonra kırmızı, daha sonra da mavi renk en iyi algılamaktadır. Gözün yeĢil, kırmızı ve maviyi algıladığı noktalardaki genlik değerleri toplamı 1‟i, yani beyaz rengi verir.
0,587 yeşil (G) + 0,299 kırmızı (R) + 0,114 mavi (B) =1 beyaz EĢitlik 3.2
EĢitlik 3.2 den anlaĢıldığı gibi üç ana renk belirli oranlarda karıĢtırılarak beyaz renk elde edilir (Hamilton 1992). EĢitlik 3.3 kullanılarak gri seviyeli görüntüye çevrilmiĢ resim ġekil 3.8 de gösterilmiĢtir.
Y=0.299R (Kırmızı)+0.587G (Yeşil)+0.114B (Mavi) EĢitlik 3.3
ġekil 3.8. Renkli Resim ve Y=0.299R+0.587G+0.114B formülüyle gri seviyeli görüntüye çevrilmiĢ resim 3.4.2. Gri seviyeli resmin - siyah beyaz resme dönüĢümü
Resim iĢleme, görüntüyü oluĢturan piksellerin durumları göz önünde bulundurularak gerçekleĢtirilen bir olaydır. Resim üzerindeki nesneler, piksellerin birbirleriyle olan iliĢkileri ve değerleri hesaplanarak bulunabilir. Bu iĢlemler sırasında bir piksel değeri ne kadar karmaĢık yapıda olursa yapılacak hesaplamalar o kadar çoğalır ve zorlaĢır. Görüntünün hızlı ve etkili bir Ģekilde iĢlenmesi için, görüntüyü oluĢturan piksel değerlerinin en sade hale getirilmesi gerekir. Bu yüzden bir piksel
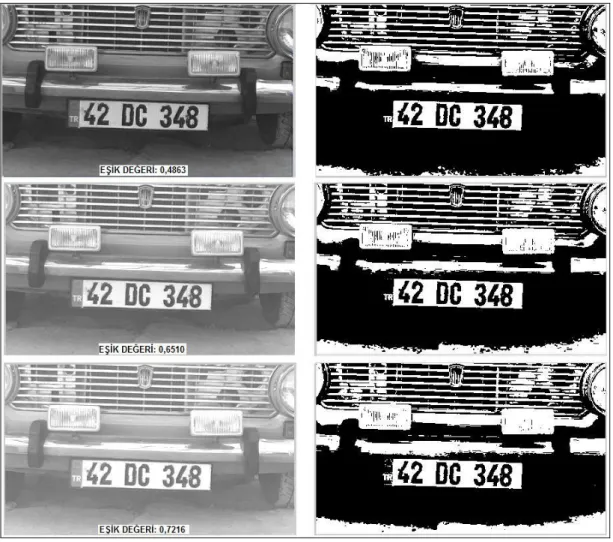
değerinin en sade ve yalın biçim olan siyah ya da beyaz hale getirilmesi gerekir. Siyah beyaz resim 0 ve 1 değerlerinden oluĢan resimlere verilen format ismidir. Resim üzerinde cisim aramadan önce siyah beyaz formata dönüĢtürülmesi hız bakımından büyük katkı sağlar. Bir gri resim her pikseli için 0 ile 255 arasında değerler alır. Siyah-beyaz resimde 0 ile 1 arasında değerler aldığına göre, 0 ve 127 arasındaki değerleri 0, 127 ve 255 arasındaki değerleri 1 olarak değiĢtirerek, gri resimden siyah beyaz resim elde edilmiĢ olur. Fakat gri resimlerin parlaklık değeri, çekildiği ortama, atmosfer koĢullarına ve çevresel koĢullara göre farklılık göstereceği için bu sınır(eĢik) değerinin değiĢken olarak belirlenmesi gerekir. Çünkü yüksek ıĢık bulunan bir ortamda çekilen gri bir resmin piksel değerleri daha çok beyaz renge(0 değerine) yakın olacaktır. Tam tersi bir durum olan, karanlık bir ortamda çekilen resmin piksel değerleri daha çok siyah renge (255 değerine) yakın olacaktır. Bu durumlarda, sınır(eĢik) değeri olarak 127 sayının alınmasıyla siyah beyaz formata dönüĢtürülen görüntü üzerinde netlik ve kalite kaybolacaktır (Otsu 1979).
Eğer eĢik değeri belirlenmeden 0-127 arasındaki değerler 0, 127-255 arasındaki değerler 1 olarak siyah-beyaz resme çevirme iĢlemi yapılırsa sonuç ġekil 3.9 daki gibi olur.
ġekil 3.9. Sabit 127 olan eĢik değeriyle gri seviyeli resmin - siyah beyaz resme dönüĢümü Otsu‟nun bölgesel eĢikleme algoritması (Otsu 1979) değiĢken eĢik seviyesini bulmak için kullanılabilir. Bulunan eĢik seviyesi [0,1] aralığında, parlaklık parametresidir. Otsu metodu gri seviye için eĢikleme yaparken eĢikleme değerini optimum olarak bulur. Bir kere histogram değeri hesaplandıktan sonra yöntem oldukça basit ve hızlıdır. Otsu metodunun gri seviyeden iki seviyeli imgeye dönüĢtürürken yaptığı varsayımlar:
• Histogram ve imgenin bimodal (siyah ve beyaz) olduğu • imgenin sabit istatistik değerlere sahip ve
• değiĢmeyen parlaklık değerine sahip olduğu, Ģeklindedir.
Metot, gri seviye imgenin piksellerini iki tane sınıfa ayırır. Bu sınıflar arka plan ve nesnedir. Bunun için resmin önce histogramı çıkarılır. Histogram çıkarıldıktan sonra otsu algoritmasıyla eĢik değeri belirlenir. Otsu metodunun program kodu Çizelge 3.1 de gösterilmiĢtir (C# programlama diline uygun yazılmıĢtır) ;
Çizelge 3.1. Otsu Algoritmasının C# ile yazılmıĢ Program Kodu ( Kakıcı, 2009 ) int otsuValue;
void Otsu() {
double fmax = -1.0;
double m1, m2, S, toplam1 = 0.0, toplam2 = 0.0; int nTop = 0, n1 = 0, n2;
for (int i = 0; i < 256; i++) {
toplam1 += (double)i * (double)histogram[i]; nTop += histogram[i];
}
for (int i = 0; i < 256; i++) { n1 += histogram[i]; if (n1 == 0) continue; n2 = nTop - n1; if (n2 == 0) break;
toplam2 += (double)i * (double)histogram[i]; m1 = toplam2 / n1; m2 = (toplam1 - toplam2) / n2; S = (double)n1 * (double)n2 * (m1 - m2) * (m1 - m2); if (S > fmax) { fmax = S; otsuValue = i; } } }
Bu eĢik değeri bulunduktan sonra, bulunan eĢik değerinin üstünde kalan piksel değerleri 1, eĢik değerinin altında kalan piksel değerleri ise 0 olacak Ģekilde siyah beyaz resme dönüĢüm iĢlemi yapılır.
ġekil 3.10. Otsu Metoduyla eĢik değeri hesaplandıktan sonra gri seviyeli resmin - siyah beyaz resme dönüĢümü
ġekil 3.9 ile ġekil 3.10 daki siyah beyaz resimler arasındaki görüntü farkı çok rahat anlaĢılmaktadır. Resimleri siyah beyaz resme çevirmeden önce eĢik değerlerinin hesaplanmasının ne kadar önemli olduğu bu resimlerden anlaĢılabilir. Kaliteli bir siyah beyaz resim üzerinden iĢlem yapmak çok daha sağlıklı, doğru ve hızlı sonuç alınmasını sağlar.
3.5. Kenar Bulma ( Edge Detection )
Bir resim üzerinde arka plan ve ön plan olmak üzere 2 sınıf bölge bulunur. Üzerinde araba resmi bulunan bir görüntü düĢünülecek olursa, arka plan olan yol üzerinde duran bir ön plan araba resmi vardır. Sadece araba resmi göz önünde bulundurulursa arka plan olan araba üzerinde duran ön plan bir plaka bölgesi vardır. Bu iki sınıf bölgenin geçiĢlerinde bulunan piksel değerleri arasında büyük farklar vardır.
Bir cismi oluĢturan bölgede bulunan pikseller yaklaĢık olarak aynı değerlere sahiptir. Resim üzerinde birden fazla cisim olduğu düĢünülecek olursa, bu cisimlerin hepsi yaklaĢık olarak birbirine yakın piksel değerlerinden oluĢur. Bu bilgi kullanılarak, resim üzerinde piksel değerlerinin büyük değiĢim gösterdiği bölgelere, cisimlerin kenar bölgeleridir denilebilir. Bu sayede resim üzerinde bulunan cisimler ayırt edilebilir. Cisimlerin kenar bölgelerini bulmak için çeĢitli kenar bulma yöntemleri vardır.
3.5.1. Roberts Cross kenar bulma yöntemi
Roberts Cross, yönteminin en büyük avantajı basit ve hızlı sonuç üreten bir yöntem olmasıdır. Dezavantajı ise resim üzerinde gezdirilen matrisin boyutları küçük olduğu için gürültülere karĢı çok duyarlıdır. Fakat kenarları tespit noktasında çok hassastır, keskin olmayan kenar bölgelerini bile tespit edebilir (Gonzalez ve ark. 2004).
Gx =
1 0
Gy =
0 1
0 -1 -1 0
Roberts Cross kenar bulma yöntemi için yukarıdaki Gx ve Gy sabit matrisleri resim üzerinde gezdirildikten sonra elde edilen yeni matrislerin her ikisi beraber her noktadaki mutlak eğim büyüklüğünü ve eğim yönünü bulmak için birleĢtirilir. Bu birleĢim büyüklüğünü bulmak için EĢitlik 3.4. kullanılır.
EĢitlik 3.4 Fakat daha hızlı iĢlem yapmak için EĢitlik 3.5. de kullanılabilir.
G = |Gx| +|Gy| EĢitlik 3.5
ġekil 3.11 de Roberts Cross kenar bulma filtresinden geçirilmiĢ resim görülebilir.
ġekil 3.11. Orijinal resim ve Roberts Cross filtresinden geçirilmiĢ resim 3.5.2. Gradient operatörü
Gradient kenar bulma filtresi kullanılarak kenar sınırları ince, renk karĢıtlığı (kontrast) az ve sobel kenar bulma yönteminden daha bulanık resimler elde edilebilir.
-1 +1
-1 +1
-1 +1
Gx ve Gy 3x3 „lük birer matristir.
EĢitlik 3.6
Bütün resim üzerinde Gx ve Gy maskeleri gezdirilerek resim üzerinde Gx ve Gy
değerleri hesaplanır, EĢitlik 3.6 belirtildiği gibi bulunan bu değerlerin önce karesi alınarak, toplanır ve karekökü alınır. Böylelikle yeni piksel değeri hesaplanır.
3.5.3. Laplacian operatörü
Laplacian operatörü, kullanılan g maskesi sayesinde her yönde keskinleĢtirme yapmaya yarar. Laplacian operatörü gri ton geçiĢlerini vurguladığı halde az kullanılan bir yöntemdir. Çünkü Laplacian operatörü gürültüye karĢı çok hassastır (Gonzalez ve ark. 2002).
+1 +1 +1
-1 -1 -1
-1/4 -1/4 1 -1/4
-1/4
G maskesi resim üzerinde gezdirilerek, Laplacian kenar bulma operatörü
uygulanmıĢ olur. ġekil 3.12 de Laplacian kenar bulma operatörü uygulanmıĢ resim gösterilmektedir. Çizelge 3.2 de Laplacian kenar bulma algoritması görülebilir.
Çizelge 3.2. Laplacian kenar bulma algoritmasının Turbo C ile yazılmıĢ kodu (Green 2002) for(Y=0; Y<=(originalImage.rows-1); Y++) {
for(X=0; X<=(originalImage.cols-1); X++) { SUM = 0;
/* Resim Sınırları kontrol */
if(Y==0 || Y==1 || 2 || Y==originalImage.rows-1)
SUM = 0;
else if(X==0 || X==1 || X==originalImage.cols-2 || X==originalImage.cols-1)
SUM = 0; /* ĠĢlem Burda BaĢlar */ else {
for(I=-1; I<=1; I++) {
for(J=-1; J<=1; J++) {
SUM = SUM + (int)( (*(originalImage.data + X + I + (Y + J)*originalImage.cols)) * MASK[I+1][J+1]); } } } if(SUM>255) SUM=255; if(SUM<0) SUM=0;
*(edgeImage.data + X + Y*originalImage.cols) = 255 - (unsigned char)(SUM); fwrite((edgeImage.data + X + Y*originalImage.cols),sizeof(char),1,bmpOutput); } } G =
ġekil 3.12. Orijinal resim ve Laplacian filtresinden geçirilmiĢ resim 3.5.4. Sobel operatörü
Sobel operatörü resim üzerindeki arka planı koyulaĢtırarak sınırları belirgin hale getirir (Gonzalez 1987). -1 -2 -1 +1 +2 +1 -1 +1 -2 +2 -1 +1 EĢitlik 3.7
Bütün resim üzerinde Gx ve Gy maskeleri gezdirilerek resim üzerinde Gx ve Gy
değerleri hesaplanır, EĢitlik 3.7 de belirtildiği gibi bulunan bu değerin önce karesi alınarak, toplanır ve karekökü alınır. Böylelikle yeni piksel değeri hesaplanır. Çizelge 3.3 de Sobel kenar bulma algoritması görülebilir. ġekil 3.13 Sobel filtresinden geçirilmiĢ resim görülebilir.
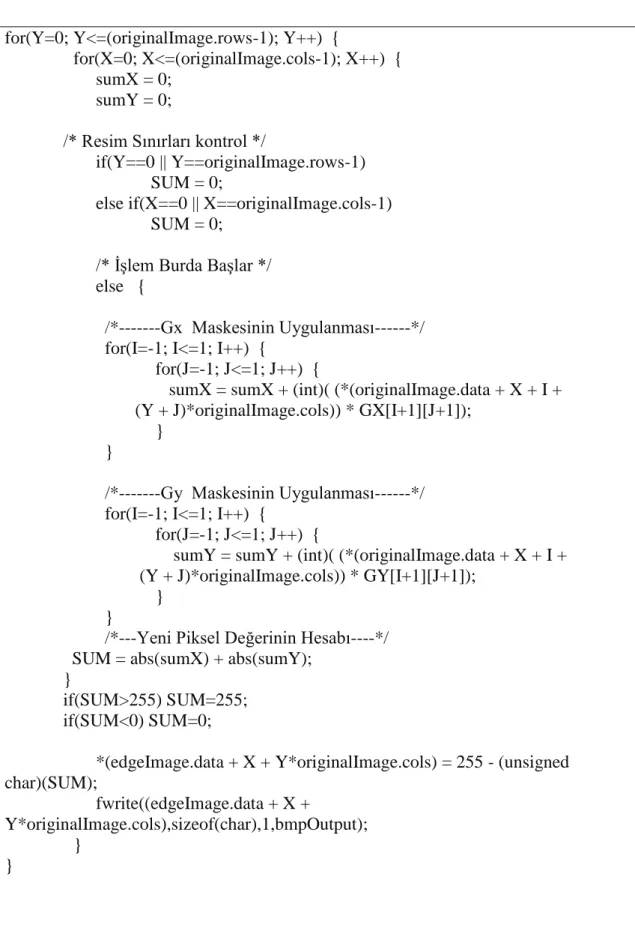
Çizelge 3.3. Sobel kenar bulma algoritmasının Turbo C ile yazılmıĢ kodu (Green 2002). for(Y=0; Y<=(originalImage.rows-1); Y++) {
for(X=0; X<=(originalImage.cols-1); X++) { sumX = 0;
sumY = 0;
/* Resim Sınırları kontrol */
if(Y==0 || Y==originalImage.rows-1) SUM = 0;
else if(X==0 || X==originalImage.cols-1) SUM = 0;
/* ĠĢlem Burda BaĢlar */ else {
/*---Gx Maskesinin Uygulanması---*/ for(I=-1; I<=1; I++) {
for(J=-1; J<=1; J++) {
sumX = sumX + (int)( (*(originalImage.data + X + I + (Y + J)*originalImage.cols)) * GX[I+1][J+1]);
} }
/*---Gy Maskesinin Uygulanması---*/ for(I=-1; I<=1; I++) {
for(J=-1; J<=1; J++) {
sumY = sumY + (int)( (*(originalImage.data + X + I + (Y + J)*originalImage.cols)) * GY[I+1][J+1]);
} }
/*---Yeni Piksel Değerinin Hesabı----*/ SUM = abs(sumX) + abs(sumY);
}
if(SUM>255) SUM=255; if(SUM<0) SUM=0;
*(edgeImage.data + X + Y*originalImage.cols) = 255 - (unsigned char)(SUM); fwrite((edgeImage.data + X + Y*originalImage.cols),sizeof(char),1,bmpOutput); } }
4. MATERYAL VE YÖNTEM
4.1. Plaka Tanımada ĠĢlem Hızının Önemi
Resim iĢleme sırasında harcanan süre miktarı oldukça önemlidir. Çünkü plaka tanıma iĢleminin gerçek zamanlı video üzerinden yapıldığı düĢünülecek olursa, saniyede 25 kare çekilir, yani saniyede 25 tane iĢlenebilecek resim yakalanır. Yakalanan her resim karesi üzerinde plaka tanıma iĢlemi yapmak çok doğru bir yaklaĢım olmaz. 1 saniyede yakalanan 25 kare neredeyse birbirinin aynısı resimlerdir. Bu yüzden resimlerden herhangi birini iĢlemek yeterli olacaktır. Bir resim iĢleme sırasında iĢlemci meĢgul olacağı için yakalanan diğer resim kareleri iĢlenemeden kaçırılmıĢ olur. Sürekli olarak yeni resim kareleri geleceği için önceki yakalanmıĢ resimleri daha sonra iĢlemek de mümkün olmaz. Bundan dolayı bir sonraki resim iĢlenmeye baĢlayabilmesi için en kısa sürede plaka tanıma iĢlemi yapılmalıdır. Resim iĢleme süresi 2 saniye sürerse, gerçek zamanlı bir video üzerinden 2 saniyeden daha uzun sürede ancak bir resim alınabilir. Resim iĢleme süresine ek olarak okunan plaka verisinin veri tabanından kontrol edilmesi ve veri tabanına yazılması gibi iĢlemler içinde zaman harcanır. Hareket halindeki trafiği izleyen bir video kamera üzerinden 3 saniyede bir resim alınarak iĢlenirse, bir resim alındıktan sonra kamera önünden 3 saniyeden daha kısa bir süre içinde geçiĢ yapan tüm araçların resimleri alınamaz ve plaka tanıma iĢlemi uygulanamaz. Bu yüzden mümkün olan en hızlı Ģekilde plaka tanımlama iĢlemi yapılmalı ve arkasından diğer resim üzerinde plaka tanıma iĢlemi baĢlatılmalıdır.
4.2. Plaka Tanıma Sistemi ve Algoritma Mantığı
Bu çalıĢmada gerçekleĢtirilen Plaka Tanıma Sistemi, temel olarak 3 bölümden oluĢmaktadır. Bunlar:
1. Plaka yerinin tespiti
2. Karakterlerin ayrıĢtırılması 3. Karakterlerin Tanınması
Programlama dili olarak ilk önce Matlab mühendislik yazılımı kullanılmıĢtır. Fakat projenin hayata geçirilmesi durumunda, programı kullanacak olan bilgisayarlarda Matlab‟ın alt yapısının da kurulması gerekeceği için Matlab yerine C# programlama
4.3. Plaka Yerinin Tespiti
4.3.1. Literatürde kullanılmıĢ bazı yöntemler
4.3.1.1. Yatay çizgi maskesi
Plakanın yerini bulmak için yatay bir çizgi maskesini resim üzerinde gezdirilerek plaka imzasını arama yöntemi kullanılmıĢtır (Kaplan ve ark. 2002). 640x480 piksel çözünürlükte fotoğraflar çekebilen bir dijital kamera ve iĢlem için bir adet PIII 500 MHz bilgisayar kullanılmıĢtır. Plaka yerinin belirlenmesi için ilk önce kenar bulma yöntemi (edge detection) kullanılmıĢtır.
Kaplan ve ark. (2002) tarafından kenar belirleme için Canny, Prewitt, Sobel ve Zero Crossing gibi birçok kenar belirleme yöntemi kullanılmıĢ fakat bu yöntemlerle, baĢarı ve hız açısından istenilen sonuç alınamamıĢtır. En iyi sonuç gri-seviyeli kenar belirleme yöntemi kullanılarak alınmıĢtır. Kenar bulma yönteminden sonra elde edilen görüntü üzerinde, resmin alınma uzaklığına bağlı olarak hesaplanan ve plaka boyutlarını kapsayan plaka maskesi resmin ilk pikselinden baĢlayarak gezdirilmiĢ, gezilen her bir bölgede beyaz piksel sayısı hesaplanarak en yoğun beyaz bulunan bölge hesaplanmaya çalıĢılmıĢtır. Plaka karakter rengi ve plaka zemin rengi birbirine zıt tonda oldukları için en yoğun beyaz bulunan bölge üzerinde çok fazla cisim kenar çizgisi mevcut demektir. Bu bölgede plaka karakterlerinin bulunma ihtimali en yüksektir.
Resim üzerinden plaka değerinin okunması için geçen süre 1,5 saniye olarak açıklanmıĢ ve bu sürenin 2/3 görüntü üzerinde plaka konumunun belirlenmesinde kullanılmıĢtır. Bu da plaka bölgesini bulmak için yaklaĢık olarak 1 saniye harcandığını gösterir. Bundan dolayı, hareket halindeki trafik de kullanmak için uygun değildir.
4.3.1.2. Ġmza teoremi
Ġmza teoremiyle plaka bölgesinin bulunması için resim üzerinde daha önceden boyutları belirlenmiĢ bir dikdörtgen gezdirilir. Bu gezdirme sırasında bu boyutları belirlenmiĢ çerçeve içerisinde kalan alanın sütün toplam vektörü belirlenir. Plaka karakterlerinin bulunduğu bölgede, karakterin bulunduğu sütun hizasında siyah piksel sayısı yerel maksimum değeri ve üstüne yükselir, 2 karakter arasında bulunan sütun hizasında ise siyah piksel sayısı yerel minimum değerine ve altına düĢer. Bulunan bu toplam vektörler içinde daha önce belirlemiĢ yerel minimum ve maksimum değerleri art arda geliyorsa bu bölgenin plaka bölgesi olma ihtimali vardır. ġekil 4.1 de örnek resim görülebilir ( Lu 1995).
ġekil 4.1. Ġmza teoremiyle plaka bölgesinin bulunması (Lu 1995)
Bulunan plaka bölgesinde, y ekseni boyunca satır toplam vektörleri hesaplanarak karakterlerin üst ve alt sınır hizaları belirlenir. Daha sonra plaka bölgesi tespit edilirken belirlenen yerel minimum ve maksimum değerleri incelenerek karakterleri ayrıĢtırma iĢlemi gerçekleĢtirilir. Fakat plaka karakterleri x eksenine paralel durumda değilse, eğim tespit edilerek karakterler x eksenine paralel duruma getirildikten sonra karakter ayrıĢtırma iĢlemi yapılmalıdır. Bu durumda, tekrar x ekseni ve y ekseni boyunca histogram hesaplamak gerekecektir. ġekil 4.2 histogramı çıkartılmıĢ resim ve ġekil 4.3 karakterlerine ayrıĢtırılmıĢ resim görülebilir. Detaylı bilgi karakter ayrıĢma bölümünde verilecektir.
ġekil 4.2. Plaka bölgesinden karakterlerin ayrıĢtırılması için satır toplam vektörü grafiği (Lu 1995)
ġekil 4.3. AyrıĢtırılmıĢ karakterler (Lu 1995) 4.3.2. Yeni bir yöntem arayıĢı ve sebebi
Plaka yerinin tespiti için daha önce kullanılan algoritmalar incelediğinde, bu algoritmaların sadece plaka tanıma sistemi için değil genel resim iĢlemek için yazılmıĢ algoritmalar olduğunu görebiliriz. Plaka tanıma iĢlemi için gereken ilk veri resim üzerinde bulunan plaka bölgesinin koordinatlarıdır. Bunun için neden tüm resim bir filtreden geçirilmelidir? Resmi belirli filtrelerden geçirirken tüm resim üzerinde iĢlem yapılmaktadır. Bu yüzden tüm resmi bir kaç farklı algoritma süzgecinden geçirmek oldukça fazla zaman kaybına sebep olmaktadır. Bunun için, bu çalıĢmada sadece plaka bölgesinde bulunan karakterleri tespit etmek için özel bir algoritma geliĢtirme hedeflenmiĢtir. Bu algoritmanın mantığı olabilecek en hızlı Ģekilde plaka bölgesi olma ihtimali bulunan bölgeleri tespit etmektir. Bu iĢlemi yaparken, resmin plaka bölgesi
dıĢındaki kısımlar üzerinde hiçbir filtreleme iĢlemi için vakit kaybetmeden plaka bölgesinin bulunması amaçlanmıĢtır.
4.3.2.1. Plaka köĢelerini tespit yöntemi
Plaka bölgesinin tespiti için bu çalıĢmada denenen ilk algoritmada mantık olarak plakaların dikdörtgensel Ģekillerden meydana geldiği göz önüne alınarak resim üzerinde dikdörtgensel bölgeler oluĢturacak noktalar tespit ederek içinde karakter barındırıp barındırmadığının kontrolü yapılmaktadır. Bunun için iç içe 2 dikdörtgensel Ģekil resim üzerinden gezdirilmektedir. Ġç içe olan bu 2 dikdörtgene A ve B denilirse, A dikdörtgenin boyutları sırayla 2*X1, 2*Y1 ve B dikdörtgenin boyutları sırasıyla 2*X2, 2*Y2 Ģeklinde hesaplanır. Burada kullanılan X1, X2, Y1, Y2 değiĢebilen piksel biriminde büyüklüklerdir. ġekil 4.4 de resim üzerinde gezdirilen köĢe bulucu yapı görülmektedir.
ġekil 4.4. Resim üzerinde gezdirilen köĢe bulucu yapı (Anagnostopoulos ve ark. 2006) Bu oluĢturulan yapı resim üzerinde, x ve y ekseninde 2 Ģer piksel artıĢ olacak Ģekilde gezdirilmiĢtir. ġekil 4.5 de köĢe bulucu yapının resim üzerinde gezdirilme mantığı görülmektedir.
ġekil 4.6. KöĢe bulucu yapının durumları
Bütün resim üzerinde Ģekli gezdirmeyi tamamlandığımız zaman, elimizde 4 gruba ayrılmıĢ, plaka bölgesinin köĢe noktaları olma ihtimalleri bulunan koordinat dizileri oluĢturulur. Görsel olarak anlaĢılması için belirlenen her nokta için resim üzerinde kırmızı noktalar konulur. ġekil 4.7 , ġekil 4.8 ve ġekil 4.9 örnek resimler görülebilir. Bu noktalar bulunurken plakanın herhangi bir köĢesinin tespit edilememe ihtimali de vardır. 3 noktası bilinen düzgün bir dörtgenin 4. noktasını tespit etmek mümkündür. Bu yüzden 4 grup koordinat dizisi, plakanın herhangi bir köĢe noktası bulunamamıĢ gibi düĢünülür. Bu koordinat dizileri içinden, 3 noktası bilinen dikdörtgen oluĢturulabilecek noktalar hesaplanır ve dikdörtgen dizisi oluĢturulmaya baĢlar. OluĢturulan dikdörtgen dizileri içinden geniĢliği 60 ile 160 piksel, boyu da 15 ile 60 piksel arasında plaka bölgesi olma ihtimali olan dikdörtgensel bölgeler tespit edilir. Seçilen plaka adayı bölgelerden birbirine çok yakın koordinatlara sahip olanlar, yani aynı bölgeyi gösteren bölgeler de elenmektedir.
Resim üzerinde kolay inceleme yapılabilmesi için muhtemel dikdörtgenin üst çizgisi mavi, alt çizgisi kırmızı, sol çizgisi yeĢil, sağ çizgisi pembe olarak çizilir. Bu sayede resim üzerinde rahat bir inceleme yapma ve hataları daha rahat tespit etme imkânı doğar.
Örnekler:
ġekil 4.7. Plaka bölgesi tespit edilen resim örneği
ġekil 4.9. Plaka bölgesi tespit edilen resim örneği
Plaka köĢelerini tespit yöntemi kullanılırken tüm resim belirli filtrelerden geçirilmez, fakat hesaplanması gereken çok fazla iĢlem olduğu için yine süre olarak fazla zaman almıĢtır. Ayrıca siyah beyaza çevrilmiĢ resim üzerinde eğer plakanın herhangi 1 köĢesi kapalı halde değilse plaka bölgesi tespit edilebilmiĢtir. Bu durumda plaka üzerinde bulunan rakamları almak için, siyah beyaz formata çevrilmiĢ resimdeki plakanın en az 3 köĢe noktasının kapalı olması gerekmektedir. Alınan tüm resimlerde bunu sağlamak mümkün değildir. BaĢarı oranı düĢük çıktığından dolayı bu yöntem kullanılmamıĢtır.
4.3.2.2. Histogramsız karakter arama yöntemi
Plaka tanıma iĢleminde amaç, plaka karakterlerini yazı formatına dönüĢtürmektir. Amaca ulaĢmak için önce plaka yeri tespit edilir, sonra karakterler ayrıĢtırılır ve son olarak karakterler tanımlanır. Kısaca plaka bölgesinin bulunma amacı, içindeki karakterleri almaktır. Bu yüzden dikdörtgen veya kareden oluĢan plaka bölgesini aramak yerine, direk olarak plaka karakteri olma ihtimali bulunan karakterleri bulmak daha verimli bir yöntem olmaktadır. Resim üzerinde çalıĢacak algoritma plaka bölgesi aramak yerine resim üzerindeki plaka numarası olma ihtimali bulunan karakterleri aramalıdır. Bu iĢlem direk olarak istenen karakterleri vereceği için iĢlem
hızı oldukça yüksek olur ve de karakterin etrafında bulunan plaka sınır çizgisinin bulunmaması veya bozuk olmasının, olumlu veya olumsuz bir önemi kalmamaktadır.
Plaka tanıma iĢlemi yapılacak renkli formattaki resim önce Gri seviyeli resim haline dönüĢtürülür. Gri seviyeli resim üzerinde, belirtilen koordinatta bulunan piksel renk değerini okuma iĢlemi, byte dizisinden indis değeri belirtilerek okunacak sayısal değerden, iĢlem hızı olarak daha fazla zaman almaktadır. Bu yüzden gri seviyeli resmin tüm piksel değerleri, bir byte dizisine aktarılır ve iĢlem yapılacak resim piksel değerleri çok daha hızlı bir Ģekilde iĢlenir. Bu byte dizisinin boyutu hesaplanırken EĢitlik 4.1 kullanılır.
ĠĢlem yapılacak Byte dizi boyutu = Gri resmin geniĢlik değeri X Gri resmin
yükseklik değeri (EĢitlik 4.1)
Plaka bölgesi bulunduktan sonra yapılacak olan iĢlemler sırasıyla plakadan karakterlerin ayrıĢtırılması ve de karakterlerin tanınmasıdır. Bu iĢlemler sırasında da resmin piksel değerlerini içeren bu byte dizisi kullanılacaktır. Bulunan plaka bölgesi ve parçalanan karakterlerin sonuçlarını ekranda görsel olarak görebilmemiz için gerektiğinde byte dizisi, gri seviyeli resim haline dönüĢtürülerek ekranda gösterilmiĢtir.
Bu yöntemde, byte dizisine dönüĢtürülmüĢ resim yukarıdan aĢağıya çizgisel Ģekilde taranır. ġekil 4.10 da gösterilen örnek resminde, y ekseninde 2 piksel aralıkla resim yukarıdan aĢağı doğru taranmıĢtır. Taranan pikseller turuncu renkle gösterilmiĢtir.
ġekil 4.10. TaranmıĢ resim
Tarama iĢlemini tam olarak açıklamak gerekirse, resmin en üst sol kısmından baĢlanarak, aynı y ekseni hizasında x değerini birer birer artırarak, x ekseninin son pikseline kadar taramaya devam edilmektedir. X ekseninin sonuna ulaĢıldığı zaman y
ġekil 4.11. Resim Tarama Yapısı
Pikseller arasında geçiĢ yapılırken, piksellerin renk değiĢimleri tespit edilmeye çalıĢılır, buna kenar bulma yöntemi de denilebilir, fakat mevcut kenar bulma algoritmaları tüm resmi tararken, bu iĢlemde Y eksenindeki değer 2 piksel arttırılarak tarama iĢlemi yapıldığı için resimdeki tüm pikseller yerine sadece yarısı incelenmiĢ olmaktadır. ÇalıĢmada kullanılan 1500 adet resim için plaka üzerinde karakter kenarı olma ihtimali olan ve diğeri de plaka arka fon rengi olma ihtimali olan 2 pikselin fark değerleri büyük oranda 20 den büyüktür. Resim üzerinde yatay düzlemde piksel değer değiĢimi 20 den büyük olan bölgeler kenar bölgesi olarak kabul edilmektedir. Yatay düzlem de tespit edilen 2 kenar noktası aralığında bir karakterin bulunabilme ihtimali göz önünde bulundurulur. Plaka karakteri bulundurma ihtimali olan bir aralıkta arka arkaya en az 7 defa kenar noktası olma ihtimali bulunan pikseller tekrarlanırsa bu y ekseninde, karakterin olası baĢlama x noktası ve bitme x noktası bilgileri hafızaya alınmaktadır. Hafızaya alınan bu y eksenlerinin en az 4 veya daha fazla aralıksız olarak tekrar etmesi, bu bölgede plaka karakteri bulunma ihtimalini göstermektedir. Bu bölgelerin karakter baĢlama noktası ve bitiĢ noktası aralığı kırmızıyla iĢaretlenir. Bu renklendirme iĢleminin sebebi sonuçları görsel olarak görmektir. Ġlk tarama sonucun da muhtemel plaka bölgesi bulunamazsa kenar olma ihtimali olarak varsayılan fark 20 değeri (2 piksel arasındaki değiĢim değeri ) sırasıyla 15-10 ve 5 olmak üzere muhtemel plaka bölgesi bulunana kadar resim tekrar taranır. Bu fark oranı ne kadar küçülürse resim üzerinde bulunan kenar olma ihtimali bulunan nokta sayısı da o kadar artmaktadır.
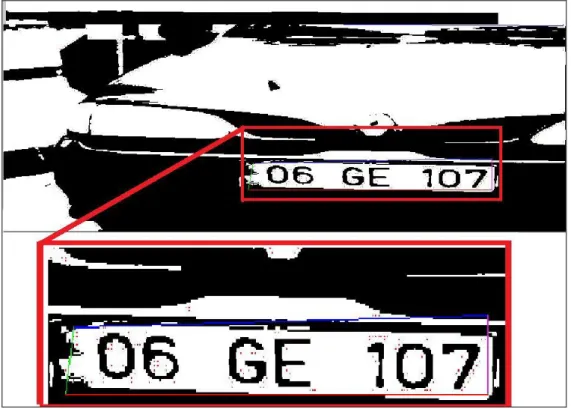
a-) Gri Seviye Resim
b-) Ġkili Seviye Resim
ġekil 4.12. Plaka bölgesi tespit edilen resim örneği
ġekil 4.12 de görüldüğü gibi plaka bölgesi tespit edilmiĢtir. Mavi çizgiler y ekseni üzerinde plaka bulunma ihtimalini gösterir. Bu mavi çizgiler arka arkaya tekrar ettiği zaman, bu bölgede plaka bulunma ihtimali artmaktadır. Kırmızı çizgilerse muhtemel karakterlerin baĢlama ve bitiĢ noktalarını göstermektedir. ġekil 4.13 ve ġekil 4.14 de plaka bölgesi tespit edilen resim örnekleri görülmektedir.
b-) Ġkili Seviye Resim
a-) Gri Seviye Resim
b-) Ġkili Seviye Resim
b-) Ġkili Seviye Resim
ġekil 4.15. Plaka bölgesi tespit edilen resim örneği
ġekil 4.15 deki resim üzerinde tespit edilen muhtemel plaka bölgeleri içinde plaka olamayacak en ve boy oranına sahip bölgeler iĢleme alınmamıĢtır. Bu bölgeler resim üzerinde yeĢil olarak belirtilmiĢtir. Testlerin yapıldığı resimler belli bir mesafeden alındığı için yine plaka bölgesinin en ve boy boyutları belli bir piksel değerinden büyük
olamaz. Fakat bazı durumlarda tespit edilen plaka bölgesinde, gerçek plaka bölgesine göre taĢma olmaktadır. Bu tespit edilen plaka bölgesinin gerçek boyutundan büyük olarak bulunmasına sebep olur, bu durumda sahip olduğu yükseklik ve geniĢlik piksel değeri de büyümektedir. Bunlarda hesaba katılarak muhtemel plaka bölgesinin:
Maksimum yüksekliği:60 piksel Minimum yüksekliği:15 piksel Maksimum geniĢliği:160 piksel
Minimum geniĢliği:60 piksel olarak hesaplanmıĢtır.
Bu plaka boyut bilgileri de göz önünde bulundurularak, resim üzerinde bulunan plaka bölgeleri karakter ayrıĢtırma algoritmasına gönderilmiĢtir. Karakter ayrıĢtırma algoritması sonuç olarak en az 5 karakter döndürmediyse, resim üzerinde muhtemel diğer plaka bölgeleri karakter ayrıĢtırma iĢlemine gönderilir. Ġncelenen resim üzerinde plaka bölgesi genellikle resmin en alt kısmında olduğu düĢünülerek, resim üzerinde bulunan muhtemel plaka bölgeleri resmin alt bölgesinden üst bölgesine doğru takip edilen bir sırayla incelenir.
4.4. Tespit Edilen Plakadan Karakterlerin AyrıĢtırılması
Plaka yeri tespiti algoritması tarafından bulunan muhtemel plaka bölgelerindeki karakterlerin ayrıĢtırılma iĢlemi bu kısımda yapılacaktır. Resim üzerinde sol üst köĢe ve sağ alt köĢe olmak üzere koordinatları belirlenen plaka bölgeleri, resimden kesilerek bu algoritmaya gönderilir. Histogramsız plaka yeri tespiti baĢlığı altında bahsedilen, byte dizisine dönüĢtürülmüĢ gri resim piksel değerleri içinden, sadece plaka bölgesinin renk değerlerini içeren uygun piksel değerleri alınır ve yeni bir byte dizisi oluĢturulur. Bu sayede sadece plaka bölgesindeki gri piksel renk değerlerine sahip bir byte dizisi elde edilir. Byte dizileriyle iĢlem yapmak çok daha hızlı olduğu için yine bu bölümde byte dizileriyle iĢlem yapılmaktadır. Gri resmi siyah beyaz resme çevirmeden eĢik değerinin altındaki pikseli siyah ve üstündeki pikseli beyaz olarak kabul ederek iĢlem yapma sebebi, plaka üzerinden kesilen karakterlerin daha kaliteli resimler halinde kalmasını sağlamak içindir.
Ana resimden kesilen plaka bölgesi, resmin x eksenine her zaman paralel durumda olmayabilir. Bu durumda plaka resmindeki karakterler aynı hizada değildir ve karakter parçalama iĢlemi kaliteli bir Ģekilde gerçekleĢtirilemez. Bundan dolayı
4.4.1. Plaka bölgesindeki eğimin tespit edilmesi ve düzeltilmesi
Karakter parçama iĢleminin baĢarılı bir Ģekilde tamamlanabilmesi için plaka bölgesi olarak gönderilen resimdeki karakterlerin x eksenine göre eğim değeri tespit edilerek karakterler x eksenine paralel bir hale gelecek Ģekilde döndürülmelidir. ġekil 4.16 da tespit edilen eğik plaka resimleri görülmektedir.
ġekil 4.16. Tespit edilen eğik plaka resim örnekleri
Eğim tespit iĢlemi için öncelikle karakterlerin x eksininde baĢlangıç ve bitiĢ noktaları tespit edilir. Daha sonra y eksenine göre karakterlerin üst ve alt sınır bölgeleri tespit edilir. Plaka üzerinde bulunan karakterlerin yükseklikleri eĢittir. Bu yüzden eğimsiz Ģekilde çekilmiĢ resimlerde karakterler x eksenine paraleldir ve karakterlerin üst sınırları ve de alt sınırları aynı hizadadır, fakat tespit edilen karakterlerin üst ve alt sınırları soldan sağa doğru düzenli Ģekilde artıyorsa veya azalıyorsa plakada eğim söz konusudur. Bu düzenli artıĢ veya azalıĢ değeri tespit edilir, x eksenindeki ve y eksenindeki farkları hesaplanarak eğim açısı bulunur.