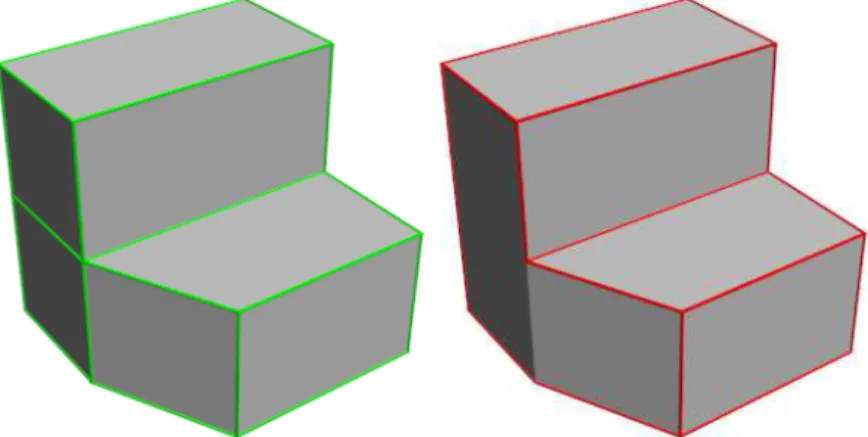
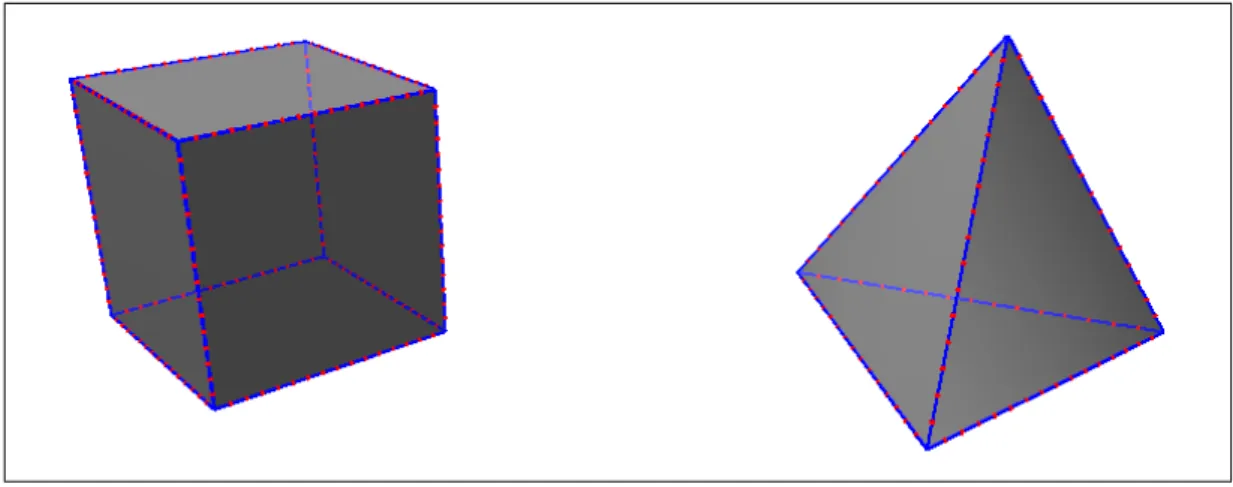
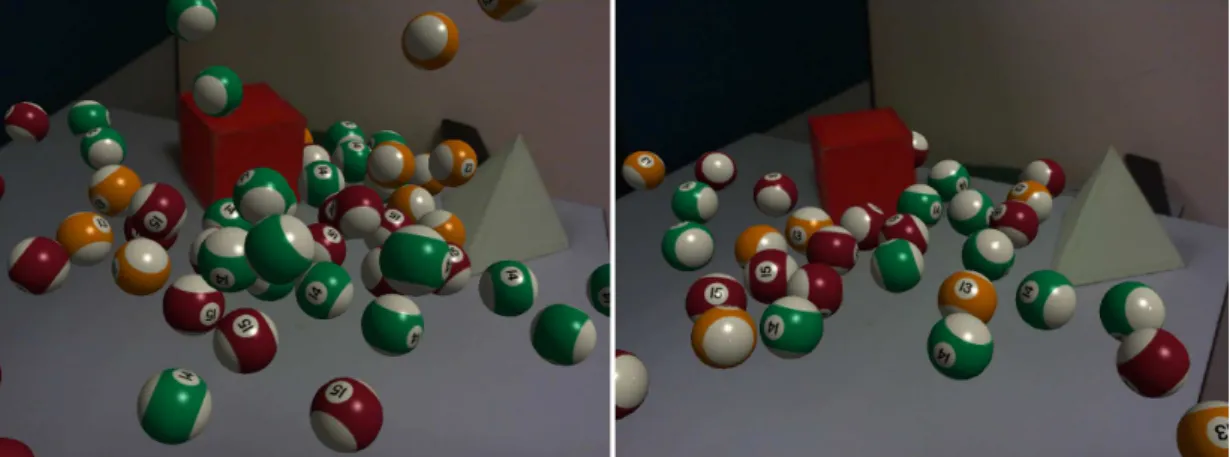
Model-based camera tracking for augmented reality
Tam metin
Şekil




Benzer Belgeler
McClure ve diğerleri (1999) tarafından geliĢtirilen bir iliĢkisel puanlamada bir öneri, bir puanlama protokolüne uygun olarak 0 ile 3 arasında puan alır ve
68 We are left therefore with Prior Holbeach and at least 35 monks to surrender Worcester Cathedral Priory on 16 January 1540, with five members 63 We saw above that, when
The evident similarity of their names, plus the fact that in the tenth century Count Wichmann of Hamaland (incorporating Deventer as well as Houtem and Esse) was also the Burggraf
(A) PS beads suspended in 500 ppm, PEO 5MDa dissolved in 1X PBS solution. At low flow rates particles are aligned at the corners and the center of the channel. At higher flow rates
1 Ekim 2009 tarihinde ise ‹stanbul T›p Fakülte- si’nden mezun, ‹ç Hastal›klar› uzmanl›¤›n› ve Roma- toloji yan dal uzmanl›¤›n› bilim dal›m›zda
Vefatındanberi bu kadar zaman geçti, fakat bir türlü muhabbetinden geçemedim. Unutulmamak için yer yüzüne gelen nadir insanlardandı. B ir de üstelik şapşal
Savçı, Eski Türkçe döneminde (8. yüzyıllar) “söz; haber, bilgi; mesaj” anlamlarını taşıyan sav < sab sözcüğü ile isimden isim yapma eki
Biz hastanemiz Çocuk Sağlığı ve Hastalıkları Kliniği’nde takip ettiğimiz aseptik menenjitli olguların yaş gruplarını ve cinsiyetleri- ni, klinik bulgularını ve
