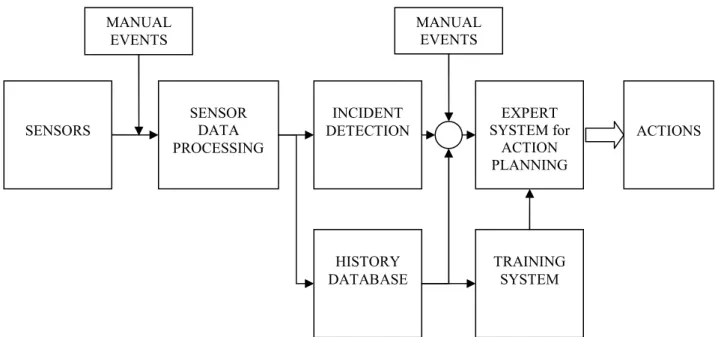
Complex event post processing for traffic accidents
Tam metin
Şekil
Benzer Belgeler
Given the central role that Marfan syndrome (MS) plays in the progression of ascending aortic aneurysm, the question as to whether earlier surgery might favor- ably modify
Given the central role that Marfan syndrome (MS) plays in the progression of ascending aortic aneurysm, the question as to whether earlier surgery might favor- ably modify
The camera is connected to a computer through the USB port, and a program is used control the mouse movement as the eye ball is moved.. The developed system has
Object-Oriented Database Systems are based on Object-Oriented Programming Language and Database storage mechanisms that depend on the data model established.. The Relational
Thermocouples are a widely used type of temperature sensor for measurement and control and can also be used to convert a temperature gradient into electricity.. Commercial
Chemical kinetics, reaction rates, concentration from the factors affecting speed, rate equations, other factors affecting reaction rates, calculation of reaction
Ceftolozane is a novel cephalosporin antibiotic, developed for the treatment of infections with gram-negative bacteria that have become resistant to conventional antibiotics.. It was
Good water quality can be maintained throughout the circular culture tank by optimizing the design of the water inlet structure and by selecting a water exchange rate so
