T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
MOBĠL HĠDROLĠK TELESKOBĠK VĠNÇLERĠN YÜK SALINIMI KONTROLÜ
Umut YILMAZ YÜKSEK LĠSANS TEZĠ Makine Mühendisliği Anabilim Dalı
Ekim-2014 KONYA Her Hakkı Saklıdır
iv ÖZET
YÜKSEK LĠSANS TEZĠ MOBĠL HĠDROLĠK TELESKOBĠK VĠNÇLERĠN YÜK SALINIMI KONTROLÜ
Umut YILMAZ
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Makine Mühendisliği Anabilim Dalı DanıĢman: Doç. Dr. Mete KALYONCU
Yıl, 72 Sayfa Jüri
Prof. Dr. Fatih Mehmet BOTSALI Doç. Dr. Mete KALYONCU Yrd. Doç. Dr. Mustafa TINKIR
Bu çalışmada, mobil hidrolik teleskobik bir vincin öncelikle cad tasarımı yapılmış ve burada bir yük ile vinç tanımlanmıştır. Çalışmanın ana hedefi, mobil teleskobik vinçlerin kaldırma silindirleri ve dönme merkezindeki tork tahriki ile hareket etmesi sonucu teleskobik vince bir halat vasıtasıyla bağlı olan yükün x, y, z referans eksenlerine göre açılı bir şekilde oluşan salınımını kontrolcü kullanarak minimize etmektir. Sistemin başarı kriteri, uygulamada ergonomik bir çalışma zemini hazırlayacak şekilde salınımı azaltmak olacaktır. Mobil hidrolik teleskobik vinç olarak ele alınan sisteme ait matematiksel model, Newton yasaları ve Lagrange Hareket Denklemi kullanılarak elde edilmiştir. Tasarlanan teleskobik vinç gerçek sistemdeki veriler dahil edilerek Matlab/Simulink® programında modellenmiştir. Giriş sinyalleri etkisiyle oluşan salınım ölçülüp bu salınımı kabul edilebilir toleranslar dahiline düşürebilecek PID kontrolcüler tasarlanmıştır. Tasarlanan kontrolcülerin her birinin kullanılması durumu için sayısal simülasyonlar yapılarak dönüş konum açısı, kalkış konum açısı ve yük salınım açıları elde edilmiştir. Bununla birlikte sistem için gerekli tork, kuvvet ve basınç değerleri elde edilmiştir. Matlab/Simulink yazılımı kullanılarak yapılan simülasyonlarda tasarlanan kontrolcülerin performansı incelenmiştir. Sayısal simülasyon kontrol uygulanmayan sistem için de yapılmıştır. Çalışma kapsamında, Matlab/Simulink yazılımından elde edilen simülasyon sonuçları karşılaştırılarak bu yazılımların yük salınımı kontrolünde kullanılabilirliği de değerlendirilmiştir. Yapılan çalışma sonuçları, avantajları ve dezavantajları bakımında literatürdeki çalışma sonuçları ile karşılaştırılmıştır.
Anahtar Kelimeler: Teleskobik Hidrolik Mobil Vinç, Salınım, PID Kontrolcü, Matlab, Simulink, Matematiksel Model, Konum Kontrolü
v ABSTRACT
MS THESIS
SWAY CONTROL OF MOBILE HYDRAULIC TELESCOPIC CRANES Umut YILMAZ
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCEOF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE IN MECHANICAL ENGINEERING Advisor: Doç. Dr. Mete KALYONCU
Year,72 Pages Jury
Prof. Dr. Fatih Mehmet BOTSALI Assoc. Prof. Dr. Mete KALYONCU Assist. Prof. Dr. Mustafa TINKIR
In this study, first of all mobile hydraulic telescopic crane's design was made and crane with load was defined. The main goal is to minimize the sway of load which bound up to telescopic crane through a rope, which is made at an angle and this movement is made with respect to x,y and z reference axes, by using controller as a result of moving via torque excitation in mobile telescopic crane‟s lifting cylinders and center of rotation. The success benchmark of system will be to reduce sway by preparing an ergonomic study base in execution.The system is mobile hydraulic telescopic crane model, equations of motion of the system are derived by utilizing Newton laws and Lagrange‟s Equation of Motion.Designed telescopic crane that includes real system datas was modelled by using Matlab / Simulink software. The sway that was formed by effect of input signals was measured and PID controller was designed to reduced the sway to an acceptable tolerances.In the case of each of the designed cotrollers, values of slewing angle, lift angle and sway angle are obtained by numerical simulations. However required torque, force and pressure values are obtained for the system.Performance of the designed controllers were investigated by conducting simulations using Matlab/Simulink software. Numerical simulations is performed for uncontrolled case as well.By comparing the obtained simulation results usability of Matlab/Simulink software in active sway control of a crane model is also evaluated. The advantages and disadvantages in terms of work results were compared with results in literature.
Keywords: Telescopic Mobile Crane, Sway, PID Control, Matlab, Simulink, Mathematical Model, Position Control
vi ÖNSÖZ
Lisans ve yüksek lisans öğrenimim sırasında ve tez çalışmalarımın her aşamasında hiçbir yardımını esirgemeyen, bilgi ve tecrübeleriyle bana yol gösteren çok değerli hocam Doç. Dr. Mete KALYONCU‟ya en içten dileklerimle teşekkür ederim. Tezi tamamlamamda önemli katkıları olan Mehmet SEZER‟e, tez çalışmaları boyunca her zaman her konuda bana değerli yardımlarını esirgemeyen Arş. Gör. Abdullah ÇAKAN‟a, MPG A.Ş. nezdinde Genel Müdürüm Sayın Veysel ALVER‟e, bana büyük emekleri geçen, beni yetiştirip bu konuma ulaşmamı sağlayan aileme ve bu süreçte sabırla destek olan nişanlım Hülya YILMAZ‟a sonsuz teşekkür ederim.
Umut YILMAZ KONYA-2014
vii ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii
SĠMGELER VE KISALTMALAR ... viii
1. GĠRĠġ ... 1 2. KAYNAK ARAġTIRMASI ... 4 3. TEORĠK ESASLAR ... 21 3.1 Matematiksel Modelleme ... 21 3.2Lagrange Formülasyonu ... 22 3.3 Kontrol ve Yapısı ... 22
3.3.1 Birinci Mertebeden Gecikmeli Sistemler (BMG) ... 23
3.3.2 İkinci Mertebeden Gecikmeli Sistemler (IMG) ... 24
3.3.3 Kontrol Etkisi ... 26
3.3.3.1 PID Kontrol ve Yapısı ... 26
3.4 Kontrol Yöntemleri ... 30
3.4.1Açık Çevrim Kontrol Yöntemi ... 30
3.4.2Kapalı Çevrim Kontrol Yöntemi ... 31
4. MOBĠL HĠDROLĠK TELESKOBĠK VĠNÇLERDE YÜK SALINIMININ MATEMATĠKSEL MODELLENMESĠ VE SĠMÜLASYONU ... 33
4.1 Sistemin Modellenmesi ... 33
4.2Sistemin Kinetik Enerjisi ... 34
4.3 Sistemin Potansiyel Enerjisi ... 38
4.4 Lagrange Formülasyonu ... 38
4.5 Sistemin Hareket Denklemleri ... 40
4.6 Hidromotor Giriş ve Çıkış Basıncı Hesabı ... 42
4.7 Sistemin Matlab/Simulink Ortamında Modellenmesi ... 43
5. KONTROLCÜ TASARIMI ... 51
6. SAYISAL ÇÖZÜMLER VE SONUÇLARI ... 55
7. SONUÇ VE ÖNERĠLER... 66
7.1 Sonuçlar ... 66
7.2 Öneriler ... 67
KAYNAKLAR ... 68
viii
SĠMGELER VE KISALTMALAR
Simgeler
M : Anabom uzvunun kütlesi
m : Yük kütlesi
L1 : Anabom uzvunun boyu
L2 : Halat boyu
J1y : Dikbom uzvunun y eksenine göre atalet momenti
J2z : Anabom uzvunun z eksenine göre atalet momenti
a : Kaldırma silindirinin anabom-dikbom bağlantısına olan uzaklığı b : Kaldırma silindirinin anabom bağlantı merkezine uzaklığı
g : Yerçekimi ivmesi
θ : Dikbom dönüş açısı
β : Anabom dönüş açısı
α : Dikbom uzvunun dönme hareketinden kaynaklanan salınım açısı γ : Anabom uzvunun dönme hareketinden kaynaklanan salınım açısı
T : Kinetik enerji
V : Potansiyel enerji
L : Lagrange denklemi
Ʈ 1 : Dikbom dönüş momenti
F : Anabom kaldırma silindiri kuvveti
d : Anabom kaldırma silindiri kuvvetinin dönme merkezine olan dik uzaklığı Ʈ 2 : Anabom dönüş momenti
i : Serbestlik derecesi
qi : Genelleştirilmiş koordinat setleri
Tp : Tepe zamanı
Mp : En büyük genlik
Tdr : Düzenli rejim süreci
et : Hata
P : Oransal etki
I : İntegral etki
D : Türev etki
xyük : Yükün x ekseindeki konumu
yyük : Yükün y eksenindeki konumu
zyük : Yükün z ekseindeki konumu
zpinyon : Pinyon dişli sayısı
zçember dişli : Çember dişli sayısı
ΔP : Hidromotorun kullandığı basınç (giriş ve çıkış basınç farkı)
η : Hidromotorun verimi
ʋ : Hidromotorun iletim hacmi Thidromotor : Hidromotorun dönüş momenti
Kp : Oransal etki kazanç parametresi
Ki : İntegral etki kazanç parametresi
Kd : Türev etki kazanç parametresi
Kısaltmalar
PID : Oransal+Türev+İntegral
PD : Oransal+Türev
PI : Oransal+İntegral
BMG : Birinci mertebeden gecikmeli IMG : İkinci mertebeden gecikmeli % AD : Aşma Değeri
1. GĠRĠġ
Yapı sektöründe ve taşımacılıkta vinçlerin kullanımı gittikçe artmaktadır. Hatta daha büyük, hızlı ve yüksek olmaktadırlar. Bu da daha etkin kontrol edilmelerini ve daha güvenli olmalarını gerektirmektedir. Vinçler yaygın olarak ağır ve tehlikeli yüklerin taşınması için gemilerde, fabrikalarda, nükleer santrallerde ve yüksek binaların inşaatında kullanılır. Vinçler operasyonlarının konusu yükü bir noktadan bir noktaya en kısa zamanda ve yüksek salınımlar olmadan taşımaktır. Genellikle yetenekli bir operatör bunu yapmaya çalışır. Vinçlerin işletmeciliğini yapan firmalar, vinçlerin olabildiğince hızlı hareket etmesini ve yapılarının hafif olmasını isterler. Bunu istemelerin nedeni ise taşımacılık maliyetlerinin düşmesini ve güvenliği sağlamaktır.
Bomlu vinçler, diğer vinçlere göre bom yapısından dolayı yük taşıma anlamında daha avantajlıdır. Sonuç olarak bomlu vinç, döner vinç ve köprülü vinçlerle aynı kapasitede yük taşıyabilmektedir. Onun için bütün taşınabilir vinçler bomlu vinçtir. Bomlu vinçler kargo taşımacılığı yapan büyük gemilerde ve offshore yapılara kurulur. Bununla beraber kargo taşımacılığı yapan kamyonlarda da bomlu vinçler kullanılır. Diğer yandan döner vinçler ve köprülü vinçler sabit taşıma işlemi yapan yerlerde kullanılır. Köprülü vinçler yaygın olarak taşımacılık endüstrisinde, maden ocaklarında, demir çelik fabrikalarında ve montaj hatlarında kullanılırlar, döner vinçler çoğunlukla yapı sektöründe kullanılırlar, teleskobik vinçler ise kaldırma kapasitesinin yüksek olduğu yerlerde tercih edilirler bunlar; inşaat alanları, fabrikalar, silo kurulumları, karayolları, büyük makine parkurlarının hazırlanmasında vb.
Teleskobik vinçler düşey ve yatay hareketleri sayesinde genel anlamda her türlü yükün yerini değiştirebilen makinelerdir. Bu makineler genellikle ağır yüklerin kaldırılmasında ve zemine batmış makinelerin kurtarılmasında kullanılır. Çember dişli üzerinde 360° dönebilen tipleri olduğu gibi 180° lik dönüş yapan tipleri de kullanılmaktadır. Destek ağırlıkları ve ayak basma bomları sayesinde ağır yükler kolayca yükü ayaklara dağıtarak kaldırılabilmektedir. Teknik olarak teleskobik vinçlerde 30° yük alınır ve yük aldıktan sonra uzatma bomları açılmaz kilit mekanizmaları devreye girer bu şekilde yükü bir yerden başka bir yere aktarabilmektedir.
Vinçler çalışmaları sırasında birçok dinamik yükün etkisine maruz kalırlar. Bu dinamik yükler özellikle büyük vinçler için dış etkilerden ve yük salınımlarından kaynaklanmaktadır. Dış etkenler genel olarak rüzgardan ve gemilerde bulunan vinçler
için deniz hareketlerinden kaynaklanmaktadır. İç etkilere ise yükün ve vincin uzuvlarının hareketi esnasında oluşan kütle atalet momentleri neden olur. Bu etkiler genellikle kararsızdır ve vinçte titreşimler oluşmasına neden olur. Oluşan bu titreşimler eğer kontrol edilmez veya engellenmez ise iş kazalarına sebep olabilir ve çalışma verimini düşürebilir. Bu nedenle dinamik yükün etkisinin azaltılması ve vinçlerin tasarımı yapılırken bu etkilerin hesaba katılması çok önemlidir. Bu dinamik yüklerin etkisini azaltmak için vinç operatörleri taşıma işlemini oldukça yavaş yapmaktadır. Tasarımcılar ise dayanımı artırmak ve yorulmayı azaltmak için vincin yapısını sağlamlaştırarak daha ağır bir yapı oluşmasına sebep olurlar. Bu nedenle yükün salınım açısının düşürülmesi son derece önemli bir problemdir. Genel uygulamada vinçlerde salınımı önlemek vinci kullanan operatör insiyatifi ile sürekli salınan yöne doğru ters kısa ivmelenmeler yapmak suretiyle manüel olarak yapılır. Bu durum vinç operatörünün sürekli stres ve yüklü bir konsantrasyon altında çalışmasını zorunlu kılar. Çoğu zaman bu durum yoğun çalışma temposu ile birleştiğinde oluşan insan kaynaklı hatalara bağlı üretim, malzeme ve zaman kayıplarına sebep olmaktadır. Operatör insiyatifinden alınması gerektiğini düşünen kontrol mühendisleri için bu durum, yük salınım kontrolü olarak bilinir ve kontrol mühendislerinin üzerinde çok çalışma yaptığı ve yapmaya devam ettiği konu olarak ilgi çekmektedir.
Birçok mühendisin kontrol mekanizması geliştirerek, farklı yöntemleri içinde barındıran birçok denetleyici geliştirmişlerdir. Bu denetleyicilerin çoğunda göze çarpan en önemli özellik ön bir sensör bilgisi olmadan çalışma kapasitesinde yükler taşınırken salınım açısını minimize ederek konum kontrolü yapabilmesidir. Bu durum kullanılmakta olan vinçlerde büyük bir çalışma ve güvenlik avantajı olarak bilinmektedir. Bu kontrolü sağlayan denetleyiciler arasında PID denetleyiciler dikkat çekmektedir.
PID denetleyiciler genel olarak basit, güvenilir, uygulanabilir ve etkindir. Düşük maliyeti ve kullanımı kolaydır. Ayrıca alt düzey doğrusal sistemlerde performansı çok yüksektir. Bu nedenle endüstride en çok kullanılan ve en çok bilinen denetleyicilerdir. Bunun yanı sıra sabit kazanımlı olduklarından dolayı sistemdeki parametre değişikliklerini telafi edemez ve çevredeki değişikliklere uyum sağlayamazlar. PID denetleyicilerin uygulandığı sistemlerde matematiksel modelleme ve denetleyicinin kazanç parametre ayarları, denetleyici aktif hale getirilmeden yapılır.
Bu çalışmada; MPG ACAR firmasından alınan verilere göre bir çember dişli üzerinde 360° dönebilen ve kaldırma silindiri tahriki 300 bar basınç kapasitesi ile 82°
hareket edebilen, yükü bir halat vasıtası ile kaldıran teleskobik bomlu vinç üzerinde konum kontrolü yapılmıştır. Anabom uç kısmında halat ucuna asılı yük ile belirlenen konum doğrultusunda hareketler gerçekleştirilmiş ve bunun sonucunda oluşan salınım kontrolü yapılmıştır. Çalışma teorik olarak yapılmıştır. Sistemin dinamik modeli, sistemin kontrollü ve kontrolsüz davranışlarını görmek amacıyla Lagrange metodu kullanılarak yapılmış ve hareket denklemleri elde edilmiştir. Sistemin katı modellenmesinde ise üç boyutlu modelleme programı olan Solidworks®kullanılmıştır.
Sistem üzerinde sürtünmeler ihmal edilip matematiksel modelde elde edilen veriler MATLAB/Simulink ortamında PID blokları kullanılarak, bloğun kazanç parametre katsayıları ayarlanmak suretiyle kontrollü bir davranış sağlanmıştır. Bu PID kontrolcülerin performans kriterleri uygulanması ve uygulanmaması durumlarına göre Matlab ortamında karşılaştırılmış ve grafiklere yansıtılmıştır.
Literatür araştırmaları neticesinde incelenen çalışmalara göre bu çalışmanın farklılıkları öncelikle sensörsüz bir sistem kurulmuş olmasıdır. Bu çalışmada matematiksel modelden, yükün konum bilgileri alınıp PID kontrolcülerle yük hareketinin kontrollü bir şekilde yapılması sağlanmıştır. Diğer bir farklılık ise çalışma kapasitesinde (hız olarak) yükün bir yerden bir yere taşınmasında çok fazla bir kayıp yaşanmadan sistemin sonuçlandırılmasıdır. PID kontrolcüler alışılmışın dışında sadece eyleyicilere değil yükün konum bilgileri için de kullanılmış ve yükün hareketine bağlı olan konum bilgisini kontrol eden PID kontrolcüler, eyleyici kontrol eden PID kontrolcülerle ortak çözüm yapılarak istenilen sonuca uygun bir hareket girdisi sağlanmıştır.
Çalışma safhaları ;
1. Çalışmanın amacı ve önemi, 2. Problemin tanımlanması, 3. Kaynak araştırması,
4. Solidworks programı kullanılarak sistemin üç boyutlu katı modelinin elde edilmesi,
5. Sistemin matematiksel modelinin, katı modelden alınan veriler ışığında Lagrange formülasyonu kullanılarak elde edilmesi,
6. Matematiksel modelin MATLAB/SIMULINK programında oluşturulması, 7. Kontrolcü tasarımlarının yapılması ve sisteme dahil edilmesi,
2. KAYNAK ARAġTIRMASI
Vinçler temel olarak serbestlik derecesine göre sınıflandırılabilir. Şekil 1'de, köprülü vinç taşıma yolu ve taşıyıcı köprüden meydana gelmektedir. Bazı köprülü vinçlerde bu taşıma köprüsü gezdiği raya göre dönebilen köprü olarak kurulur. Bu kurulumda yükü yatayda iki farklı doğrultuda taşınmasına izin verir. Şekil 2.1 ve 2.2‟ deki bomlu vinç bir noktada sabitlenmiştir. Bu vinçlerin iki hareketi vardır: sabitlendiği noktada dönme hareketi ve bomun yerleşiminden doğan hareket (Abdel-Rahman ve ark.2001). Şekil 2.3‟de ise mobil hidrolik teleskobik vinç vardır. Bu kendi ekseni etrafında sonsuz dönüş hareketi ve düşey pozisyonda 82° kalkma potansiyeline sahiptir.
ġekil 2.1 Döner vinç (Abdel-Rahman ve ark. 2001)
Mühendisliğin ve endüstrinin çeşitli uygulamalarında kullanılan araç üstü hidrolik mobil vinçlerin bom ucunda halat ile asılı yükün bir yerden bir yere taşınırken minimum salınımda, maksimum hızda yani en elverişli şartlarda çalışmaları için yükün salınım hareketi kontrol edilmesi gereken önemli bir problemdir. Literatürde bu problem çözümü için birçok çalışma yapılmıştır. Bu çalışmalarda halat ve vinç bomlarının konumları birlikte ele alınarak yük salınım hareketleri incelenmiştir. Bomlar istenilen konuma getirilirken halat ucundaki yükte meydana gelen salınımlar sönümlemeye çalışılmıştır. Bu doğrultuda sarkaç modelleri gerçek mobil vinçlere yakın bir modelleme olduğu ve çalışmalarda uygulanabilirliği daha kolay olduğu için tercih edilmiştir. Sarkaç sistemi olarak modellenen yükün salınımlarını azaltmak için farklı türde algoritmalar geliştirilmiştir.
ġekil 2.3 Mobil hidrolik teleskobik vinç
Vinçler kaldırma ve dönme mekanizmasından (kaldırma için kanca-palanga grubu ve dönme için çember dişli) ve destek mekanizmalarından meydana gelir. Kanca ve palanga grubu yük taşıma mekanizmasının esas eleman görevini üstlenmektedir. Taşıyıcı grup, vincin sahada çalışması esnasında yükün herhangi bir yere çarpmasını engellemek için bir çalışma alanına kurulur (Abdel- Rahman ve ark. 2001).
Yayınlanan makaleler ve palanganın dinamiği üzerine yapılmış olan çalışmalar iki grupta incelenir. Birinci grup yükün asılma noktasının lineer hareketleri üzerine uğraşılan çalışmalardan meydana gelmektedir. İkinci grup ise yükün asılma noktasının
dönel hareketlerine dayanan çalışmalardan meydana gelmektedir. Bir bölüm çalışmanın amacına göre yapılabilir. Birçok makale yükün sallanmasını önlemek için olan kontrol mekanizmalarına ve tekniklerine değinmektedir. Bu çalışmaları içeren makaleler genellikle yalınlaştırılmıştır. Diğer taraftan kanca-palanga grubu ve vinç dinamik modellemelerinin yapıldığı çalışmalar veya kanca-palanga grubunun sallanmasının vincin çelik yapısı üzerindeki etkilerini araştıran çalışmalar aynı seviyede değildir. Basitleştirilmiş makalelerde önerilen basitleştirme yöntemi; dağılmış ve nonliner etkileri ihmal eder, halat ve çelik yapıyı rijit kabul eder ve salınım açısını çok küçük kabul eder (Jerman, B. ve ark. 2004).
ġekil 2.4 Mobil hidrolik teleskobik vinç
Yeni bir modelde vincin uzuvlarına ve halata, elastikiyet ve malzeme iç sönümleri dâhil edilerek matematiksel model çıkarılması önerilir. Bununla beraber hava direnci, rulman ve yataklardaki sürtünmelerde hesaba katılır. Problemin matematiksel modellemesi çok detaylı olduğundan sonuçların da daha gerçekçi olduğu kabul edilir. Sonuç olarak bir matematiksel model çıkarımı kolay olsun diye istenilenlerden vazgeçerek basitleştirilmemeli, basitleştirme simülasyon sonuçlarının üzerindeki özel özelliklerin etkilerine yapılabilir (Jerman, B. ve ark. 2004).
Dinamik yükleri hesaba dahil etmek için kapalı çevrim tekniği uygulanması geçerli sonuçlar vermez. Çünkü kapalı çevrim tekniği kullanılırsa kontrol etmeyi amaçlamak ve temel doğal etkileri araştırmak için basitleştirilmiş modeller ortaya çıkmaktadır. Basit modeller de dinamik yükleri bulmada doğru bir çözüm değildir. (Jerman, B. ve ark. 2004).
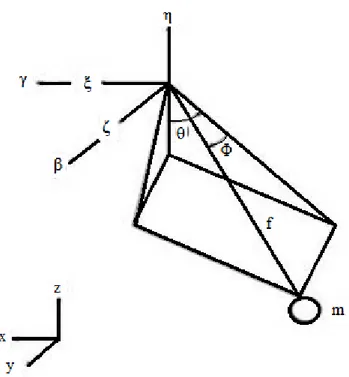
ġekil 2.5 Noktasal kütlenin koordinat sistemindeki şematik gösterimi(Abdel-Rahman ve ark.2001)
Burada [θ, β ,γ] asılı kütlenin dönüş vektörlerini göstermektedir. β, vincin kaldırma açısını ve γ ise vincin dönme açını ifade etmektedir. Θ düzlemle yaptığı açıyı, ϕ ise denge konumuna göre yaptığı açıyı belirtmektedir. Bu ifadelerin hepsi t zamanına bağlı olarak değişmektedir. Sarkacın standart modeli ancak halatı esnek olmayan ve uzamayan kabul ettiğimizde geçerlidir.
Wei ve ark. (1993), yaptığı vinç modellemelerinde şu kabulleri yapmıştır: vincin çelik yapısını tamamen ihmal etmiş, hatta sürtünmelerini ve malzeme sönümlemelerini, rüzgâr etkisini ve hava direncini ihmal etmiştir yani dışarıdan gelebilecek bozucu etkiler ihmal edilmiştir. Yükün hareketini matematiksel modelden alına veriler ışığında önceden tanımlamış ve salınımdan kaynaklanabilecek konum gelmiştir, bunun yanında halatın elastikiyetini ve ağırlığını yok sayarak rijit kabul etmiştir. Buna benzer birçok
çalışmada da aynı varsayımlar Lau ve Low (1994) tarafından taşınabilir bomlu vinçler için yapılmış olan çalışmalarda bulunabilir. Sato ve Sakawa (1988), Yoshimato ve Sakowa (1989) bir destek elemanı içeren taşıma kolu ile bomlu vinç modelinin yapılması gerektiğini önermişlerdir. Burada da çalışma kriterleri ve sınırlamalar şu şekildedir: sadece ana bom ile yardımcı taşıma kolu deforme edilebilir kabul edilir, vincin her uzvunun kütlesi ve kütlelerinin atalet momentleri vardır, dağılmış etkilerin hepsi ihmal edilir, halat deforme edilebilir kabul edilir. Kanca-palanga grubunun ve uzuvların hareketinden kaynaklanan salınımlar çok küçük olduğu için ihmal edilir. Aynı yaklaşım tarzı içeren çalışmalar Moustafa'nın (1994) önermiş olduğu vinç modelinde bulunabilir. Her iki çalışmada da vincin uzuvlarının elastik deformasyonu ve kanca-palanga grubunun salınım açısı ihmal edilir. Daha önceki çalışmalarda düşey düzlemdeki hareketlerin bütünündeki viskoz sönümlemeler kanca-palanga grubunun doğal hareketi içinde düşünülür. Yeni modellerde ise bu etki ihmal edilir. Fakat halatın elastikiyeti hesaplara dahil edilir (Jerman, B. ve ark. 2004).
ġekil 2.6 Mobil hidrolik teleskobik vinç yük salınım durumu şematik gösterimi
Miles (1984), çalışmasında sistemin cevabını asılı olan sarkacın düzlemde yaptığı basit harmonik hareketler ile kullanmıştır. Sistemin kendi arasındaki iç
hareketlerden dolayı, nonlineer hareketler gözlemlemiştir. Chin ve Nayfeh (1996), yaptığı çalışmalarda bulunan bomlu vinçlerle ilgili modellerinde iki harmonik hareket üzerinde çalışmışlardır. Bunlar birincil rezonans ve kafesin içinde oluşan parametrik rezonanslardır. Sistemin doğal frekansına yakın parametrik rezonansları oluşturan parametrik etkiler varken sistemin cevabını periyodik ve düzlemsel olduğunu bulmuşlardır. Düzlemsel etkilerin düzlem içindeki veya dışındaki salınımları etkilediğini hatta yükü aniden harekete geçirdiğini ve modellerdeki cevabını değiştirdiğini görmüşlerdir.
Elling ve McClinton (1973), bomlu vinçlerin dinamik yükler etkisinde iken lineer cevaplar vermediğini ispatlayan çalışmalar yapmışlardır. Greenwood (1988),koniksel hareket altında küresel sarkaç modellemişlerdir ve yük kaldırma hızını sabit almışlardır. Pratikte, yükün hareketi bir yay doğrultusundadır. Ayrıca düzlemsel hareketler olduğu zaman yükün doğrultusu ve potansiyel enerjisi ihmal edilemez.
Jones ve Petterson (1988), çalışmalarında büyük salınımlarda yaptıkları çalışmalarda elastikiyet gibi nonlineerite oluşturacak durumlar için görüşlerini de hesaplarına katmışlardır. Bu yüzden düzlemsel salınımlar veya düzlemsel olmayan salınımlarda modelleri işe yaramamıştır. Matematiksel modelde yük indirmesinde kullanılan eşitliğin sağı ve solundan gelen etkilerle birlikte hareketlerde kontrolsüzlükler görülmüştür. Dönme ekseninde yani x ekseninde büyük ivmelenmeler tanımlandığı için çalışmalarına nonlinner hareketleri de katmışlardır.
Abdal-Rahman ve Nayfeh (2000), çalışmalarında sabit hızla hareket eden ve değişken parametresi olarak halat uzunluklarının tanımlandığı uygulamalar yapmışlardır. Bu çalışmaların neticesinde simülasyonlar, rezonans değerine yakın olan dış etkilerin yükün kontrolsüz hareketler yaptığını göstermektedir.
Moustafa ve Ebeid (1988) köprülü vinç üzerine daha önceki çalışmaları derleyerek bir model çıkarmışlardır. Modelde harekete dahil olan tüm uzuvların (kanca-palanga grubu, vinç taşıma kolu, tahrik motorları) ataleti hesaplanmıştır.
Özkahraman (2011), çalışmasında döner vincin matematiksel modellenmesi ve yük salınımlarının kontrolünü incelemiştir. Çalışmada önce döner vinçler hakkında genel bilgiler verilmiş, matematiksel model oluşturulma yöntemlerinden bahsedilmiş ve yük salınım kontrolü hakkında yapılan çalışmalar genel olarak gözden geçirilmiştir. Ayrıca beş serbestlik dereceli bir matematiksel model oluşturulmuş ve oluşturulan bu matematiksel model kullanılarak bir bulanık mantıklı kontrolör tasarlanmıştır.
Matlab/simulink programında oluşturulan m-file ve simulink model dosyalarıyla çeşitli durumlar için simülasyonlar gerçekleştirilmiştir. Aynı anda çalıştırılan kontrolsüz durum modelinin simülasyon sonuçlarıyla karşılaştırılmıştır. Simülasyon sonuçları konum kaybına karşın yük salınımlarını engellemede başarılı olduğunu göstermiştir. Vinçlerde yük salınım kontrolü uygulamanın sistemdeki dinamik yükleri azalttığını böylece daha hafif ve daha hızlı vinç tasarımları yapılabileceğini ortaya koymuştur. Bundan dolayı yük salınım kontrolü uygulanan vinçlerin çalışma alanlarındaki iş hacminin artacağını kolaylıkla ön görebileceğini belirtmiştir. Ayrıca kontrollü vinçler iş güvenliğini de arttırmaktadır. Böylece operatörden kaynaklanan vinç devrilmeleri veya yükün aşırı salınımından kaynaklanan iş kazalarının da önüne geçilebilmektedir.
ġekil 2.7 İlerleme hareketinden kaynaklanan salınım açısı (Özkahraman. 2011)
Parker ve ark. (1995a), döner vinçler için sarkaç modelini lineerleştirmiştir. Parker ve ark. (1995b), genişletilmiş bu modelde taşıma kolunun dönüş hareketi ile uç kısımdaki halatın hareketini birbirine bağlı değişkenler olarak hesaplamıştır. Sonuçlar lineer model ile uyuşmamıştır. Modelde nonliner geometrik ve kinetik hareketleri ihmal etmiştir.
Brkic ve ark. (1998) çalışmalarında, düzlemsel ve lineer bir döner vinç modeli sunmuştur ve kulenin kütlesi 8 noktada, kaldırma mekanizmasını ve kanca-palanga sisteminin kütlelerinin birer noktada toplamıştır. Modelde sistemin duruşunu ihmal ederken, kulenin yapısı ve kaldırma motor ile halatın etkilerini hesaba katmıştır.
Ito ve ark. (1978), kamyon üstü mobil hidrolik vinçler üzerindeki çalışmalarında; bom ucunda kanca-palanga grubunu ve halat ucundaki yükü sarkaç gibi tanımlamıştır. Bom kaldırma mekanizmasını, dönme mekanizmasını ve motor momentini incelemiştir. Çalışmalarında hareketi ivmesiz olarak kabul etmiştir. Halat ucundaki salınımın kalkan ve dönen bomdan dolayı kaynaklandığını belirtmiştir.
Posiadala ve ark. (1990), kamyon üstü mobil vinçleri sarkaç modeli şeklinde modelleyerek çalışmıştır. Bom ve halat hareketinden doğan eylemsizlik kuvvetlerini de hesaba katmıştır. Hesaplarını değişik ivmelenme durumlarına göre yapmıştır. Posiadala ve ark. (1991), önceki çalışmasına ek olarak halatın elastikiyetini de matematiksel modele dahil etmiştir. Sonuç olarak sistem cevabındaki salınım frekanslarının hızlı değişimleri gözlemlemiştir. Posiadala ve ark. (1997), çalışmasında vinç uzuvlarını rijit, destek uzuvlarını ise elastik yay olarak modellemiştir. Salınım frekanslarının hızlı değişim sebebi olarak destek uzuvlarının ve bomların verdiği eylemsizlik cevaplarından dolayı oluştuğunu, yavaş frekans değişimlerinin ise kanca-palanga grubunun doğal frekansından kaynaklandığını ifade etmiştir.
Towerk (1998), kamyon üstü mobil vincin modellemesini, destek ayaklarının temas ettiği yüzeyi esnek olarak yapmıştır. Vinç gövdesini (şasi) rijit, bomları esnek, halatı esnek ve kanca-palanga grubunu sarkaç olarak modellemiştir. Salınım frekanslarını iki farklı bom dönüş hızına göre hesaplamıştır. Sistem cevabının ise dar frekans aralıklarında olduğunu görmüştür.
Maczyński (2003), vinçlerin dönmeleri esnasındaki yük pozisyonunu ve minimum yük salınımı üzerine çalışmıştır. Üst yapının bir dönme tahriki ile harekete geçirildiği basitleştirilmiş bir model Şekil 2.9‟da görülmektedir. Vinci tamamen rijit kabul etmiştir. Geri beslemeli bir kontrol sistemini kullanmıştır. Çıkardığı sonuçlara
göre; x eksenindeki salınımlar üzerinde çok etkili olsa da y eksenindeki salınımlarda o kadar etkili sönümlemeler yapılamadığını belirtmiştir. Tam olarak iki yönde yük salınımı var ise aynı anda her iki yöndeki salınımı da sönümlemenin mümkün olmadığını belirtmiştir.
ġekil 2.9 Vinç ve kontrol modeli (Maczyński 2003)
Sawodny ve ark. (2002), çalışmasında limanlarda bomlu vinçlerin aktif olarak kullanılmasının giderek arttığını belirtmiştir. Bu durumun vinç hareketlerinin çalışma hassasiyeti ve güvenliği üzerindeki öneminin de peşinden arttığını göstermiştir. Bomlu vinçlerde yükün hareketinin denetimi için bir yörünge takip ve kontrol mekanizması üzerinde çalışmıştır. Halat açısını ileri ve geri beslemeli kontrol mekanizmasıyla istenilen sınırlarda tutmaya çalışmıştır. Yörünge izleme denetimi LIEBHERR LHM 400 bomlu vinci üzerinde denenmiş ve olumlu sonuçlar alınmıştır.
Kawada ve ark. (2002), çalışmasında PID kontrolcülerin basit ve uygulanabilir kontrol yapıları olduğunu belirtmiştir. Bununla birlikte zamana göre değişen ve / veya doğrusal olmayan sistemlerde uygun kontrol parametrelerini bulmanın çok zor olduğunu belirtmiştir. Etkili bir kontrolcü tasarımı için uygun anma modelinin seçmenin
bir etken olmasına rağmen bunun genellikle kolay olmadığını belirtmiştir. Bu çalışmada yeni bir PID kontrolcü tasarımı düzenini, uygun nominal model üzerinde gerçek kodlu genetik algoritma kullanarak dizayn etmiş ve önermiştir.
Sawodny ve ark. (2003), robot kollarındaki esnek modellemeyi bomlu vinçlere uygulamışlardır. Yörünge takip ve kontrol mekanizması kullanmıştır. Bu çalışmada ek olarak vincin vincin dönme konumlandırılması üzerine yörünge izleme modülünü, kinematik kısıtları da göz önüne alarak zaman değişkenli dizayn etmiştir. Jiroskobik etkileri de sisteme dahil etmiştir. İleri beslemeli denetim sistemi kullanmıştır.
Arnold ve ark. (2005), çalışmasında bomlu vinçlerde, optimal kontrol yaklaşımlı geri bildirim kontrol sistemini yük salınımlarını azaltmada kullanılmıştır. Vinç ve yük doğrusal olmayan ve Newton-Euler yöntemiyle modellenmiştir. Yük salınım kontrolü için çok aşamalı bir denetim mekanizması kullanmıştır. Kaldırma silindirinin meydana getirdiği küçük salınımlar önlenemese de uygulamada aşama kaydetmişlerdir.
Ouyang ve ark. (2010), döner vinçlerde bom hareketlerinden düşey ve yatay hareketleri inceleyip yük salınımına büyük ölçüde etki eden hareketin yatay yönde olduğunu belirlemiştir. Düşey yöndeki hareketin oluşturduğu salınımda yerçekiminin sönümleyici etki oluşturduğunu belirlemiştir. Sistemde kullanılan yörünge denetim mekanizması Şekil 2.10‟da gösterilmiştir. Lyapunov istikrar teorisini kullanmıştır. Salınımı önlemede önemli bir başarı kaydetmiştir.
ġekil 2.10 Döner vinç şematik gösterimi (Ouyang 2010)
Yanai ve ark. (2000), çalışmasında doğrusal olmayan denetçi kullanarak döner vinçlerde yük salınımını sönümlemeye çalışmıştır. Bu yük salınımı problemi için doğrusal model kullanarak yapılan kontrolcü tasarımlarının iyi bir performans göstermediğini belirtmiştir. Vinçlerin yüksek frekanslarda birden fazla moduyla
doğrusal olmayan dinamik sistem olarak ele alınması gerektiğini belirtmiştir. Dönme mekanizmasındaki servo sistemin yük salınımı göz önüne alınıp tasarlanması gerektiğini belirtmiştir.
Kawada ve ark. (2001), araç üstü mobil vinçlerde yük salınımı üzerine olan çalışmasında bom uzunluğu bom açısı ve bomun ivmelenme açısını dahil eden bir değişken kazanç parametreli PD kontrolcü tasarlamıştır. Ana kumanda girişi olarak PD kontrolcü tanımlamıştır. PD kazanç parametrelerinin değişimi, on-line tabanlı tahmini cevaplar kullanılarak yapılmıştır, bu işlem yapılırken LR ve LJ yinelemeli en küçük kareler yöntemini uygulamıştır. Sonuç olarak sistemdeki yük salınımında etkin azalmalar olduğunu belirtmiştir.
Ahmad ve ark. (2011), döner vinçlerde yük salınımı ve vincin modellemesinde Euler ve Lagrange metodunu kullanmıştır. Döner hareket ve oluşturduğu salınım için yan yana yerleştirilmiş PD denetleyiciler ile bulanık mantık tabanlı denetleyicileri birlikte kullanmıştır. İki kontrol metodunun birlikte kullanılmasının klasik denetleyicinin yalnız oluşturduğu etkiye nazaran daha hızlı cevap verdiğini belirlemiştir.
Hamalainen ve ark. (1995), çalışmalarında vinç uzuvlarını 5 konumda incelemiştir: kaldırma kısmı, hem kaldırma hem de ilerleme, sabit hızda ilerleme, hem indirme hem de yavaşlama anı, indirme kısmı. Minimum enerji ve zaman kullanmak için kaldırma ve indirmeyi, hareket zamanı ile aynı anda kullanarak nonlineer vinç modeli oluşturmuşlardır. Konumların minimum sürede ve istenilen cevapları için deneme yanılma metodu kullanmışlardır. Nümerik simülasyonlar ve çeşitli deneylerin sonucu, artık salınımların olmadığını göstermişlerdir. Ayrıca hareket sırasında salınım açısının 6° kadar olmasını sağlamışlardır ve operatörün kullandığından daha hızlı ve daha düzgün bir taşıma grafiği çizmişlerdir.
Küçüker (2007) çalışması olan asılı sarkaç sisteminde konum kontrolünü ele almıştır. Bu çalışma basite indirgenmiş, bir vinç sisteminde yük salınım kontrolü ile örtüşmektedir. Sarkaç parametrelerinde oluşan değişimlerin sistemin kontrolünü olumsuz yönde etkilemekte ve kararsızlığa sebep olabileceğini belirtmiştir. Söz konusu bu sorunların çözümü için literatürde geniş uygulama alanı bulan PID vb. gibi klasik kontrol yöntemleri yetersiz kaldığını öngörmüştür. Sorunun çözümü için model esaslı adaptif kontrol (MAEK) yöntemlerini kullanılması gerektiğini önermiştir. Çalışmasında asılı sarkaç sisteminin model esaslı adaptif konum kontrolü öngörmüştür. Öncelikle laboratuar ortamında gerçekleştirilen bir asılı sarkaç sisteminin matematiksel modeli
kullanılarak Matlab/Simulink yazılımı ortamında PID ve model esaslı adaptif kontrol yöntemleri uygulanmıştır. Daha sonra aynı kontrol yöntemleri Labview yazılımı kullanılarak gerçek zamanda yürütülerek değişik koşullar için deneysel sonuçlar elde edilmiştir. Elde edilen deneysel sonuçlar ile benzetim sonuçlarının oldukça uyumlu olduğu, PD kontrolör ile model esaslı adaptif kontrolün birlikte kullanılması durumunda oldukça iyi sonuçlar elde edildiği gözlenmiştir.
ġekil 2.11 MAEK yöntemi kullanılarak kontrol blok diyagramı (Küçüker 2007)
Butler ve ark. (1991), klasik geri beslemeli birincil kontrollerden ibaret olan PID kontrol stratejisini ve birincil kontrollerin tasarımı için kullanılan modellenmemiş dinamik ihmal edilmiş lineer referansları, uygulanmış kontrolleri hesaplamak için kullanmıştır. Modellenmemiş dinamikleri hesaplamak için, model hatalarını minimize etmek için modellenmemiş transfer fonksiyonlarını seçmiştir. Bu kontrol stratejileri skalalı vinç modelinde gerçeklenmiştir. Sonuçlar, yürütme arabasının önceden tanımlanmış hattı boyunca yaptığı birkaç evrimden sonra artık salınımların engellenmesinde önemli gelişmeler kaydetmiştir.
Gustafsonn (1995), çalışmalarında bomlu vinçlerde, dönme ve kalkma hareketlerin oluşturduğu salınımları tek düzlemde kontrol etmenin mümkün olmadığını göstermişlerdir. Sadece düzlem dışı kontroller kullanarak düzlem dışındaki palanga hareketlerinin sabitleştirmeyi başarabilmiş fakat düzlem içinde olan hareketlerin durağanlığını sağlayamamıştır. Böylece palanganın durağanlığını hem iç hem de dış düzlemlerde kontrol etmenin daha doğru olacağına karar vermiştir. Bomlu vinçler için;
dönme, kalkma ve kaldırma hareketine palanganın cevabından dolayı bomlu vinçlerde palanga hareketinin tahmini ve kontrolü diğer tipteki vinçlere göre daha karışık olduğunu belirtmiştir. Ayrıca birçok bomlu vinç taşınabilir olduğundan bozucu giriş etkilerinden vinci korumanın imkansız olduğunu belirtmiştir. Sonuç olarak, bomlu vinçler için yapılan her etkin kontrolde temel etkiler hesaplanması gerektiğini söylemiştir.
Schaper ve ark. (2014), çalışmasında bomlu vinçlerin çalışma sahasında yükün bir yerden başka bir yere taşınması esnasında yük konum doğruluğunun ve taşıma hızının endüstriyel uygulamadaki öneminden bahsetmiştir. Bu önem arz eden durumun çalışma alanlarında uygulanabilmesinin ise yük salınım kontrolü ile mümkün olabileceği üzerinde durmuştur. Yük salınımının ölçülmesi için bir sensör kullanılması gerektiğini ve algoritma için gerekli yükün tahmini konum bilgilerinin bu yolla sağlanabileceğini ve bu şekilde kontrol mekanizması oluşturarak yükün salınımının minimize edilebileceğini belirtmiştir. Bu operasyonun bilgi işlem algoritması gerektiren, halat askı noktasındaki ivmelenmeden sinyalle alınabilecek bir sistem olduğunu belirtmiştir. Matematiksel modelden alınan bilgilerden yola çıkarak oluşturulan tahmini yük konum bilgisinin yanlış sonuçlar verebileceğini, uygulamada sensör bilgisinin daha gerçekçi ve daha hızlı çözüm olacağını savunmuştur.
Uçuk (2009), çalışmasında klasik (PD, PID) denetleyiciler ve bulanık (fuzzy) denetleyici, bir köprülü vincin minimum salınımlı konum kontrolünü sağlamak amacıyla tasarlamıştır. Denetim sistemlerini, klasik denetleyicileri ve bulanık denetleyicileri açıklamıştır. Daha sonra sistemin hareket denklemleri elde etmiştir. Vincin bulanık mantık kontrolü için sistem Matlab Simulink yazılımı yardımıyla modellemiştir. Doğrusal olmayan hareket denklemleri, doğrusallaştırıldıktan sonra klasik kontrol (PD ve PID) tasarımında kullanılması için transfer fonksiyonu bulmuştur. Bu denetleyiciler sisteme uygulanarak konum-zaman ve salınım-zaman grafikleri elde edilmiş ve denetleyiciler karşılaştırılmıştır.
Auering ve Troger (1987), Maksimum hız, minimum salınım prensibini, çalışmalarında sabit hızda seyahat eden ve kaldırma hareketini yaparken sınırlı hızlarda çalışan kule vinçlerde taşıma zamanını minimize etmek için kullanmışlardır. Tekniği vincin kaldırma ve seyahat hareketleri için gerekli olan kuvvetlerden oluşturmuşlardır. Palanganın serbest artık salınımlarla çalışması esnasında önemli gelişmeler kaydetmişlerdir.
verimliliği, güvenliği ve hassasiyeti etkilediğini belirtmiştir. Bu problemi aşmak için yaklaşım metodu olarak sensörsüz bir geri bildirim ve bulanık mantık tabanlı denetleyiciyi seçmiştir. Modellemesini bir prototip vinç üzerinde, farklı halat uzunlukları ve yükleri kullanarak yapmıştır. Bu modellemelere uygulanan denetleyici sistemin sonuçlarını ise karşılaştırmıştır ve Şekil 2.12 ve 2.13‟de görülmektedir.
ġekil 2.12 Vinç ve yük salınımı; halat uzunluğu 0,8-1,5-2,2 m için yük 10kg (Smoczek 2014)
Solihin ve Wahyudi (2007), çalışmasında gezer vinçlerde otomatik kontrol tabanlı olarak sensör kullanmanın iyi bir performans eldesi için etkili olduğunu fakat algılama noktasında yükün yapmış olduğu salınım hareketi için sensör kullanmanın maliyetli ve zahmetli olacağını belirtmiştir. Bu yüzden çalışmasının temeli olarak sensörsüz yük salınım kontrolünü almıştır. Sensörsüz salınım kontrolü için vincin matematiksel modeline sayalı iki temel yaklaşım önermiştir. İlk yaklaşım olarak hayali bir konum sensörünü, gerçek konum sensörü girdisi elde edebilecek şekilde blok diyagramında tanıtmıştır. Bu yöntemde yükün salınım hareketi, tahrik uzuvlarından alınan hayali sensör bilgilerini yani matematiksel modelden alınan tahmini verileri kullanarak tahrik uzuvlarını konumlandırmaya yönelik bir çalışma yapmıştır. İkinci yaklaşımda ise yörünge takip mekanizması oluşturarak konum değişikliğine bağlı referans değişikliğine bağlı veri elde edip tahrik mekanizmasını konumlandırmaya yönelik bir çalışma yapmıştır. Önerilen bu yöntemleri laboratuar ortamında bir prototip vinç üzerinde verimlilik ve kontrol açısından değerlendirmiştir. Çalışma sonuçlarında kullanılan iki yöntemin de sensör tabanlı yük salınım kontrol sonuçlarına yakın performans değerleri sağladığını belirtmiştir. İki yöntemi kendi içlerinde kıyasladığında ise sanal sensör olarak sisteme entegre ettiği vinç modellemesinde daha kontrollü sonuçlar almıştır. Yapılan çalışmanın farklı parametrelerde de yapılarak desteklenmesi gerektiği önerisinde bulunmuştur.
ġekil 2.15 Sensörsüz salınım kontrol blok diyagramı 2 (Solihin ve Wahyudi 2007)
Klosinski (2005), çalışmasında mobil vinçler de yükün taşınması esnasındaki yük salınımlarını önleme metotları ve yöntemleri üzerinde durmuştur. Bunun için vinci modellerken matematiksel model ile birlikte vinç hidrolik tahrik mekanizması için bir kontrol ve klasik denetçileri de dahil eden bir sistem oluşturmuştur. Yük salınımının, vincin özellikle dönme hareketinden kaynaklanan açısal ivmelerden ve atalet kuvvetlerinden kaynaklandığını belirtmiştir. Bu problem merkezkaç ve coriolis kuvvetlerinin de görülebildiği bir problem olarak da tanımlanabilmektedir. Vincin dönme hareketi için hidrostatik tahrik sistemi (hidromotor) sürücü olarak tanımlanmıştır. Yükün belirlenen gitmesi gerektiği konumdan sapma değerine göre alınan geri bildirim ile oransal vana aracılığı ile hidrolik yağ akışı kontrol edilerek, dönme hareketi yükte minimum salınım etkisi oluşturacak şekilde hareketini tamamlamıştır.
Takeuchi ve ark. (1988), çalışmalarında artık salınımları minimize ederken dönüş hareketlerini en uygun zamanda yapmak için Input-Shaping tekniğini kullanmayı önermiştir. Artık salınımların kontrolü ve dönme hareketini kule vinçlerde yapmak için dönme açısının ivmelenme profilini kullanarak bu kontrolü uygulamıştır. Nümerik simülasyonlar bu stratejinin dış düzlemlerdeki salınımı önleyebildiğini ancak bomlu vinç durmaya başladıktan sonra oluşan iç düzlemdeki salınımları önleyemediğini göstermiştir.
karşın dönen bomun ve yükün konumunun kontrolü için iki kat kontrol tipi kullanmışlardır. Kullandıkları kontrolcü tipleri PID ve PD kontrolcülerdir. PD kontrol ile palanganın salınım açısını PID kontrol ile de bomun dönme ve kalkma hareketleri esnasında konumlarını kontrol etmiştir. Bunları nümerik bir simülasyona döktüklerinde ise palanga salınımlarının 10° olduğunu göstermişlerdir.
ġekil 2.16 Salınım kontrol mekanizması blok diyagramı (Klosinski 2005)
Lee (1997), Tavan vinci üzerine yaptığı bir çalışmada yürütme arabasının konumu için PI kontrolünü ve palangadaki salınımlar için de PD kontrollü bir yapı önermiştir. Bu kontrol stratejisi palanga sisteminin doğal frekansı çevresinde titreşim azaltıcı bir filtre gibi davrandı. Sabit halat uzunluğunda, skalalı vinç modelinde yapılan çeşitli deneyler, hızlanma ve yavaşlama ivmelenme sırasındaki geçici salınımları kadar olduğunu gösterdi. Fakat hedef noktasında artık salınımlar olmadı. Bununla beraber yüksek dişli çevrim oranlarından dolayı değişken palanga kütlesine karşı hassas değildi. Ayrıca vincin seyahati esnasındaki titreşim azaltıcı kontroller çok yavaştı böylece dış etkilerin neden olduğu salınımlardan kolayca etkilenebiliyordu.
3. TEORĠK ESASLAR
Tez çalışması kapsamında, Mobil Hidrolik Teleskobik Vinçlerde Yük Salınım sisteminin fiziksel modeli ve hareket dinamikleri; dönüş hareketinin gerçekleştiği bir dikbom, buna bağlı kaldırma hareketinin gerçekleştiği bir anabom, uzatma bomlarının ucunda halat ile konumlandırılmış bir yük tanımlanarak; konum kontrolü yapılmıştır.
Sistemin doğrusal olmayan hareket denklemleri Langrangian metoduyla elde edilmiştir. Bu hareket denklemlerinden yola çıkarak, normal sistem davranışı incelenip, durum uzay modeline göre sistemin matematiksel modelli çıkarılmıştır.
İlk olarak sistem matlab/simulink ortamında SolidWorks katı modelden alınan veriler referans alınarak modellenmiştir daha sonra gerçek girdilere göre sinyaller aracılığıyla verilen tahrikler sonucu oluşan salınımı ölçülmüştür. Matematiksel modelden elde edilen sonuçlar ise matlab/simulink ortamına dahil edilerek sistem burada da gerçeklenerek salınım ölçülmüştür.
Sistemin kontrolü ilk olarak, transfer fonksiyonları ve doğrusal olmayan hareket denkleri kullanılarak geliştirilmiş olan PID kontrolcü ile yapılmıştır. Sistemin PID kontrol cevabı irdelenip, PID kontrol kazançları belirlenmiştir. P,I ve D; bu kontrol cevaplarına göre yük salınımını minimize edecek kazanç katsayıları, sisteme geri besleme şeklinde dahil edilmiştir.
3.1 Matematiksel Modelleme
Bir fiziksel sistemin dinamik davranışını temsil eden matematiksel denklemlere matematiksel model denir. Kontrol edilmek istenen dinamik sistemin matematiksel modellenmesi, sistemin analiz ve denetleyici tasarımında önemli bir adımı oluşturur. Kontrol edilen bir sistem verildiğinde, öncelikle sistemin dinamik özelliklerini belirleyen bir değişken takımını tanımlamak gerekir. Örneğin, kontrol etmek istediğimiz bir elektrik motorunu ele alalım. Burada sargılara uygulanan gerilim, sargılardan akan akım, motorun milinde oluşan moment, rotorun açısal hızı veya konumu sistem değişkeni olarak seçilebilir. Bu değişkenler, motorun dinamiğini ifade eden matematiksel denklemleri tanımlayan fiziksel kurallar üzerinden birbirleriyle ilişkilidir. Burada motorun çalışma koşullarına ve modellerin ayrıntısına bağlı olarak türetilen
sistem denklemleri doğrusal, doğrusal olmayan, zamanla değişen ya da zamanla değişmeyen olabilir.
3.2Lagrange Formülasyonu
Dinamik bir sistemin hareket denklemlerini ve bunların cevaplarını (konum, hız, ivme) elde etmek için kullanılan matematik tabanlı yaklaşıma Lagrange formülasyonu denir. Formülasyon şu şekildedir;
L= T – V (3.1) d dt ∂L ∂qi
−
∂L ∂q = Ʈ 1 (3.2) L: Lagrangian T: Sistemin toplam kinetik enerjisi
V: Sistemin toplam potansiyel enerjisi
i: Serbestlik derecesi
qi: Genelleştirilmiş koordinat setleri; i:1,2,3….n
3.3 Kontrol ve Yapısı
Mobil hidrolik teleskobik vinçlerde yük taşıma işlemi esnasında harekete başlama ve durma anlarında operatörü salınımı önlemek için hesap noktasında zora sokan kontrol problemi ortaya çıkar. Bu problemi aşmak için bir çok yol denendiyse de ortak ve tek yok insan kontrolünden bu durumu alıp bir sistem içine dahil ederek otomatik kontrol ile yükün hareketini ve salınımı matematiksel modelden elde edilen veriler ışığında tahmin ederek optimum çalışma şartlarında hareketi kontrol etmektir. Bu veriler ışığında birçok kontrolcü ile sistem kontrol edilebilmektedir. Bu kontrolcülerin performans kriterlerine göre uygulanabilirliği de değişmektedir. Yapmış olduğum çalışma kapsamında kontrolcü olarak PID kontrolcüler tercih edilmiştir. PID kontrolcülerin yapısını, çalışma şekillerini, yaklaşım tekniklerini, sonuçlarını ve performanslarını incelemek çalışmanın geriye kalan kısımları için yol gösterici
olacaktır. Doğrusal sistemler iki şekilde sınıflandırılmıştır; birinci mertebeden gecikmeli sistemler, ikinci mertebeden gecikmeli sistemler olmak üzere.
3.3.1 Birinci Mertebeden Gecikmeli Sistemler (BMG)
𝐱𝐚(s)=𝐬.(𝐬.𝐓+𝟏)𝐊 (3.3)
ġekil 3.1 Birinci mertebeden gecikmeli sistem diyagramı
Son değer teoremi:
x
adr=
lim
𝑠→0(𝑠. x
a(s))
(3.4)x
adr=lim
s→0(s.
s.(Ts +1)K)
(3.5)x
adr=
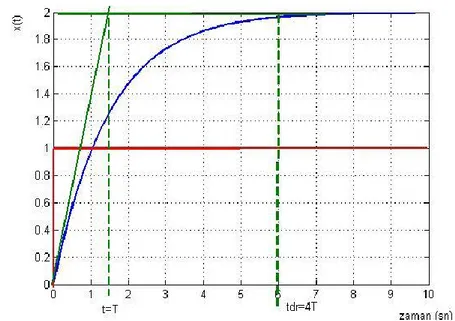
K (3.6)Düzenli rejim süresi:
t=T => xa(T)=0,632.xadr (3.7)
t=3T => xa(3T)=0,95.xadr (3.9)
t=4T => xa(4T)=0,982.xadr (3.10)
3.3.2 Ġkinci Mertebeden Gecikmeli Sistemler (IMG)
İkinci mertebeden istemlerin analizinde sistemin mekanik, elektriksel vb. özellikleri olup olmasına bakılmaksızın karakteristik iki parametre belirlenmiştir. Bunlar sönüm faktörü ve doğal frekanstır.
Sönüm faktörü: Sistemin kendi dinamiğinden doğan titreşimleri yok etme yeteneğini belirleyen boyutsuz bir parametredir. Tanım olarak transfer fonksiyonumuzun paydasının katlı kökleri olduğu durumdaki sönüm değeri kritik sönüm değeri olarak tanımlanmıştır.
Δ=𝐜𝐤𝐫𝐢𝐭𝐢𝐤𝟐 – 4mk = 0 (3.11)
ckritik=2 mk (3.12)
Bir sistemin sönüm faktörü; o sistemdeki sönüm katsayısının, o sistem için kritik olan sönüm katsayısına oranını ifade eden büyüklüktür.
ξ=c c kritik = c 2 mk (3.13) Doğal Frekans=Wn= k m (3.14) Kazanç= 1 k (3.15)
Eğer sönüm faktörümüz 1 den küçük ise karekök içindeki ifade negatif sonuç verir ve sistemin iki karmaşık (eşlenik) sayı kökü vardır. Bu durumda sistem kritik altı sönümlü sistem olarak tanımlanır. Dolayısı ile sistemin davranışı salınımlıdır, bu tür sistemler titreşim sistemleri olarak da adlandırılır.
ġekil 3.2 Kritik altı sönümlü sistem
Genel olarak kritik altı sönümlü sistemlerin birim basamak cevapları, Bazı teknolojik performans tanım değerleri açısından önem taşır. Bu değerler, tepe zamanı, tepe genliği, düzenli rejim süreci, azalma faktörüdür.
Tepe zamanı(Tp): İkinci mertebeden gecikmeli bir sistemin düzenli rejime
geçişi sırasında genliğinin maksimum değere ulaşıncaya dek geçen süredir.
En büyük genlik(Mp): İkinci mertebeden gecikmeli bir sistemin düzenli rejime
geçişi sırasında genliğin ulaştığı maksimum değerdir.
AĢma değeri (%AD): En büyük genliğin 1‟in (birim basamak cevabı olduğu için) üstünde kalan kısım olarak tanımlanır.
Düzenli rejim süreci (Tdr): Yaklaşık olarak birim basamak zaman cevabının
asimtotlarından hesaplanır.
3.3.3 Kontrol Etkisi
Kontrol etkisi bir sistemin çıktısının önceden belirlenen kriterlere uygun bir zaman davranışı göstermesini ifade etmektedir. Bu açıdan bakıldığında en temel kontrolcü, sistemin başında duran operatördür. Yani operatör; sistemi gözlemler, algılarına uygun öngörülerde bulunur ve buna uygun olarak sistem girdisini değiştirir.
Bu duruma getirilen bir başka çözüm ise sisteme operatörün yaptığı işi yerine getirebilecek bir başka sistem eklemektir. Böylelikle artık sistem manuel değil otomatik olarak kontrol edilmiş olur. Bu sisteme otomatik otomatik kontrol sistemi, kontrol edilen sisteme eklenen, sisteme de kontrolcü denir. Kontrolcü diye adlandırılan alt sistem esas olarak tüm sistemin bir parçası olarak düşünülmelidir. Yani sistem davranışı denildiğinde tüm sistemin bir aradaki davranışından (sistem değişkenlerinin zaman ile değişiminden) bahsedilmektedir. Burada kontrolcünün görevi sistem davranışını biçimlendirmektir. Yani kontrolcü bir sistemin tüm işlevselliğini bir amaca yönelik değiştirecek şekilde iş görür. Bu sebep ile girdi olarak sistemin o andaki durumunun ve ya çıktısının bir göstergesine ihtiyaç duyar. Çoğu uygulamada bu girdi sistem hatasıdır. Çünkü bu hata bizim girdimizin referansımızdan ne kadar uzakta olduğunu gösterir. Aradaki bu fark sistemin ne yapması gerektiğini belirlemek için kullanılır. En yaygın kullanılan kontrolcü PID kontrolcüdür.
3.3.3.1 PID Kontrol ve Yapısı
PID kontrol algoritması sistem hatasının üç ayrı matematiksel işlemden geçirilip toplanması ile kontrol çıktısını oluşturur. Buna bağlı olarak siysem üzerindeki etkisi aşağıda verildiği şekilde ayrıştırılır:
Oransal etki: Kontrolcü çıkışına hatanın belirli bir kazanç değeri ile çarpımı kadar etki gösterir.
Ġntegral etki: Kontrolcü çıktısında kontrol işlemi başladığı andan etkinin hesaplandığı ana kadar geçen tüm anlardaki hatanın toplamına orantılı olarak etkisini gösterir. Bu İntegral etkisi sistemin geçmişteki yaptığı hataların toplamını ifade eder.
Türevsel etki: Kontrolcü çıktısına hatanın değişimi ile doğru orantılı olarak etkisini gösterir.
PID kontrolcünün yasası şu şekildedir:
u(t)= Kpe(t) + Ki Kp e t 0 (t)dt + Kp Kd de dt (3.16)
ġekil 3.4 PID kontrol algoritması
Kullanılacak olan kontrolcü sistem karakteristiğine uygun olarak belirlenir. PID kontrol algoritmasının çeşitleri şu şekildedir:
Oransal kontrol => P kontrol
Oransal türevsel kontrol => PD kontrol
Oransal integral kontrol => PI kontrol
Oransal integral türevsel kontrol=>PID kontrol
Oransal kontrol algoritması en basit kontrol etkisini temsil eder. Kontrolcü çıktısı o andaki hata değeri ile bir kazanç değerinin çarpımıyla hesaplanır. Bu kazanç
kontrolcü çıktısının sistem hatasına hassasiyetini gösterir. Kazanç büyüdükçe kontrolcü reaksiyonu artar.
u(t)= Kpe(t) (3.17)
Bu kontrolcü hata azaldıkça daha küçük bir kontrol etkisi gösterip çıktının referansa yumuşak bir şekilde yaklaşmasını sağlar böylelikle salını etkisi azaltılabilmektedir. Buna karşılık hata küçüldükçe kontrol etkisi çok zayıflayacak belirli bir değerin altında kontrol sinyalinin bağlandığı tahrik sisteminin, sisteme etkisi çok zayıflayacak ve sistem çıktısı referansa asla tam ulaşmayacaktır. Oransal kontrolün etkisi şu şekilde özetlenebilir:
Kalkış zamanını kısaltır ( sistem tepkisini hızlandırır)
Düzenli rejim hatasını azaltır
Düzenli rejim değerini biraz azaltır
Aşma değerini azaltır
Türevsel kontrol etkisi, sistemdeki hatanın değişimine orantılı olarak belirlenir. Türev işlemi sistem çıktısının hesaplandığı andan bir sonraki anda alacağı değere ilişkin bir veri üretir. Dolayısıyla türev kontrol etkisi sisteme bir öngörü kazandırır. Türev değeri sistemdeki dalgalanmalar ile büyüyeceğinden bu durumdaki türevsel kontrol etkisi de yüksek olacaktır. Dolayısı ile sistem çıktısı daha az dalgalı bir davranış gösterecektir.
u(t)= KD 𝐝𝐞𝐝(𝐭)
𝐭 (3.18)
Sistem hatası referans doğası gereği geçici rejim süresince daha etkindir. Türevsel kontrolün bu geçici rejim sırasında oluşan salınımları azaltma etkisi oransal kontrolün sebep olduğu aşma değerindeki artışı azaltacaktır. Bu sebep ile oransal kontrolün türevsel kontrol etkisi ile beraber kullanımı göreceli olarak daha iyi bir kontrolcü yapısı oluşturur.
u(t)= Kpe(t) + KD
𝐝𝐞(𝐭)
Oransal türevsel kontrolcünün aşma değerini azaltıp ve sistemin reaksiyon hızını arttıracağı öngörülebilir. Lakin türev etkisi özellikle ölçme sistemindeki gürültülere karşı sistem hassasiyetini arttıracaktır.
İntegral kontrol etkisi oransal kontrol etkisine benzer şekilde hesaplanır fakat burada anlık hata değeri yerine sistem çalışmaya başladığı andan itibaren olan tüm anlardaki hataların toplamı bir kazanç ile çarpılır.
u(t)= Ki 𝐞(𝐭)𝐭𝟏 (3.20)
Bahsi geçen toplam sürekli sistemler için hatanın integralini ifade etmektedir.
u(t)= Ki 𝐞𝟎𝐭 (t)dt (3.21)
Sistem cevabının referans değerine ulaşması geciktikçe integral kontrol etkisi de artacaktır.
İntegral kontrol etkisinin etkisi oransal kontrol etkisi ile beraber kullanıldığında daha etkin bir biçimde belirgin olur. İntegral etkisi kontrolcünün devreye girmesinden belirli bir süre sonra etkin hale geldiği söylenmişti, yine oransal kontrol etkisinin hata küçüldükçe zayıfladığı bilindiğine göre bu iki etkinin tamamlayıcı olarak kullanılabileceği kolaylıkla öngörülebilir.
u(t)= Kpe(t) + Ki 𝐞 𝐭
𝟎 (t)dt (3.22)
Oransal etki hızlı bir şekilde sistem cevabını girdi değerine yaklaştırdıktan sonra etkisini kaybedecek bu noktadan sonra İntegral etki devreye girip kalıcı hatayı yok edecek ve sistemi yavaşta olsa tam referans değerine taşıyacaktır. Oransal denetleyicilerin (Kp), yükselme zamanını azaltmada etkisi vardır ve azaltır, ama asla tamamen yok etmez. İntegral denetleyicinin (Ki), kararlı hal hatasının sıfırlanmasına etkisi vardır ancak bu geçici tepkinin daha kötü olmasına sebep olur. Türevsel denetleyicinin (Kd), sistemin kararlılığının artmasında etkisi vardır, aşmayı azaltır ve geçici geçim davranışını düzeltir.
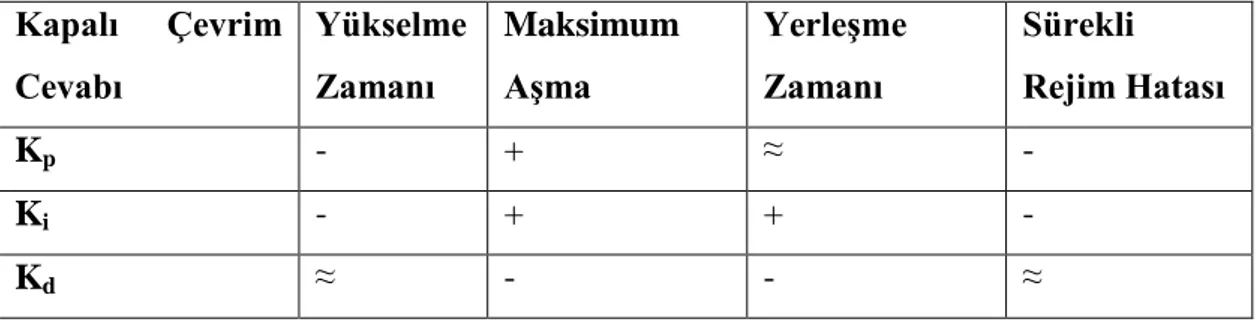
PID kontrolcü kullanılması halinde kontrolcüye ait kazanç parametrelerindeki artışın sistem cevabına etkisi Tablo 3.1‟de özetlenmektedir. (Tınkır ve ark. 2010)
Tablo 3.1 PID kontrol kazanç parametrelerinin değişiminin sistem cevabına etkisi (+ :artma, -:azalma, ≈: çok fazla değişmez)
Kapalı Çevrim Cevabı Yükselme Zamanı Maksimum AĢma YerleĢme Zamanı Sürekli Rejim Hatası Kp - + ≈ - Ki - + + - Kd ≈ - - ≈
PID kontrol kazanç parametrelerini ayarlamak için Ziegler-Nichols metodu en uygun çözüm yolu olarak bilinmektedir. Bu metodun uygulanışı aşağıdaki Tablo3.2 esas alınarak yapılmaktadır.
Tablo 3.2 Ziegler-Nichols metodu
Kontrol Tipi Kp Ki Kd P 0,5 Ku - - PI 0,45 Ku 1,2 Kp/Tu - PD 0,8 Ku - Kp Tu/8 PID 0,6 Ku 2 Kp/Tu Kp Tu/8 3.4 Kontrol Yöntemleri
Matematik modeli belirlenen bir sistemi kontrol etmek için kullanılabilecek kontrol yöntemleri, açık çevrim ve kapalı çevrim olarak iki ana gruba ayrılır.
3.4.1Açık Çevrim Kontrol Yöntemi
Kontrol işareti çıkış işaretinden etkilenmeyen sistemlere açık çevrim denetim sistemleri denir. Örnek olarak klasik çamaşır makinesi, trafik lambaları verilebilir.
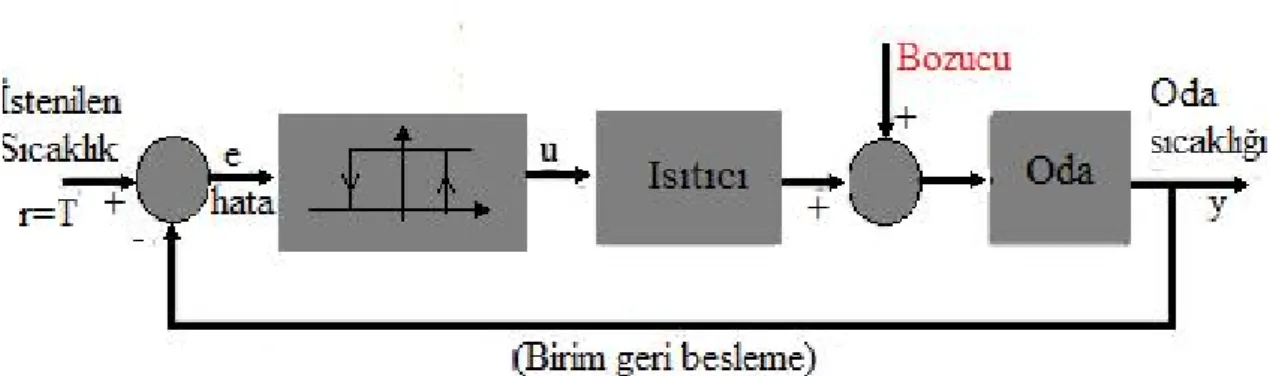
Açık çevrim denetim sistemi; sistemde oluşan değişiklikler veya sisteme etkiyen bozucu faktörler nedeni ile sistemin çıkışında oluşabilecek etkileri düzeltemez. Örneğin; aşağıda temsil edilen oda sıcaklık kontrolü;
ġekil 3.6 Açık çevrim sistemi ile oda sıcaklık kontrolü şematik gösterimi ve blok diyagramı
3.4.2Kapalı Çevrim Kontrol Yöntemi
Sisteme etkiyen kontrol işaretinin, sistem çıkışının da göz önüne alınarak üretildiği kontrol sistemlerine kapalı çevrim (geri beslemeli) kontrol sistemleri denir. Çıkışın aşağıda görüldüğü gibi sistem girişini etkilemesine geri besleme denir.
Şekil 3.6‟da gösterilen açık çevrim oda sıcaklığı kontrol örneği kapalı çevrim ile yapılırsa aşağıdaki gibi olur:
4. MOBĠL HĠDROLĠK TELESKOBĠK VĠNÇLERDE YÜK SALINIMININ MATEMATĠKSEL MODELLENMESĠ VE SĠMÜLASYONU
Bu bölümde yük altında çalışan mobil hidrolik teleskobik vincin hareket denklemleri elde edilecektir. Solidworks programında hazırlanan katı model üzerinden alınan vinç uzuvlarına ve hareketine ait değerler sonucu sistemin kinetik enerjisi ve potansiyel enerjisi elde edilmiştir. Hareket denklemlerini elde ederken Teorik esaslar bölümünde ayrıntılı şekilde anlatılmış olan Lagrange formülasyonun kullanılacaktır. Hareket denklemleri elde edildikten sonra Matlab/Simulink ortamında sistemin modellenmesi yapılarak blok diyagramları oluşturulacaktır.
4.1 Sistemin Modellenmesi
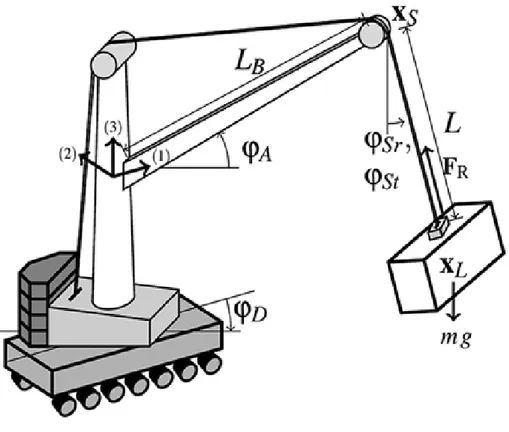
ġekil 4.1 Mobil hidrolik teleskobik vincin yapısı
Sistemde tanımlanan açıların ve parametrelerin resim üzerinde gösterilişi Şekil 4.1‟de gösterilmiştir. Sistemde yükün asılı olduğu anabom uzvunun θ açısı ile y ekseni
etrafında dönmesi, dikbom uzvunun hidromotor tahriki ile dönmesi sonucu sağlanmıştır. Aynı uzvun β açısı ile kalkma hareketi ise anabom kaldırma silindiri ile sağlanmıştır. Anabom uzvunun toplam boyu L1, halatın uzunluğu ise L2 olarak tanımlanmıştır. Anabom uzvunun kütlesi M ile halatın ucuna alınan yük ise m ile tanımlanmıştır. Halat ucuna asılan yük sistemde parametrik olarak ayarlanmıştır. Sistemde bulunan uzuvların ağırlıkları, ağırlık merkezleri, boyları, atalet momentleri SolidWorks modelleme programı ile oluşturulmuş olan katı model üzerinden elde edilmiştir. Halat yüksüz olarak kabul edilmiştir. Halat ucuna asılı yük noktasal kütle olarak tanımlanmıştır. Anabomun uç kısmına asılan yükün salınım hareketinin x-y-z eksenleri ile yapmış olduğu açılar α ve γ olarak tanımlanmıştır. Tez kapsamında sadece iki salınım açısının alınmasının sebebi; bu açılar tork tahriklerinin birebir tetiklediği açılardır, bu yüzden bu tahrik uzuvlarıyla kontrol edilebilecek salınım açıları α ve γ dır. Bu açıların ele alınan sistemde ki konumları ve Şekil4.1‟de gösterilmiştir. Yük konum denklemi elde edildikten sonra yükün hız denklemine ulaşılmış ve sistemin kinetik enerjisi elde edilmiştir. Anabom uzvunun etkisi ile değişen potansiyel enerji, β dönüş açısına bağlı olarak bulunmuştur. Bulunan kinetik ve potansiyel enerji denklem 4.22‟de gösterilmiş olan Lagrange formülasyonunda yerlerine konularak matematiksel model elde edilmiştir. Matematiksel model, simülasyon çalışmalarına temel teşkil etmektedir. Matematiksel model sayesinde sistemin dinamik davranışları tespit edilmiştir.
4.2Sistemin Kinetik Enerjisi
Sistemin kinetik enerjisinin bulunabilmesi için sistemde bulunan yükün çizgisel hız denklemleri ve dönüş açısal hızlarının bilinmesi gerekir. Yükün konumuna ait hız (v) denklemini bulabilmek için x, y, z yük konum denklemleri geometrik kurallar ve rotasyon matrisinin birlikte kullanılmasıyla bulunmuştur. Yükün konum denklemlerinin türevi, kinetik enerjisi ve sonraki aşamada takip edecek Lagrange formülasyonun bulunması için Maple matematik programı kullanılmıştır.
xyük= x1 + x2 (4.1)
yyük= y1 + y2 (4.2)
x1= L1.cosβ.cosθ (4.4) y1= L1.sinβ + h (4.5) z1= –L1.cosβ.sinθ (4.6) cosθ 0 −sinθ 0 1 0 sinθ 0 cosθ
x −L2. cosα. cosγL2. cosα. sinγ L2. sinα
=
L2. sinθ. sinα + L2. cosθ. cosα. sinγ −L2. cosα. cosγ
L2. cosθ. sinα − L2. cosα. sinθ. sinγ
(4.7)
xyük = L1.cosβ.cosθ+ L2.sinθ.sinα + L2.cosθ.cosα.sinγ (4.8)
yyük = L1.sinβ+ h – L2.cosα.cosγ (4.9)
zyük = – L1.cosβ.sinθ+ L2.cosθ.sinα – L2.cosα.sinθ.sinγ (4.10)
v2= x 2+ y 2 + z 2 (4.11)
x yük= –L1 β .sinβ.cosθ – L1θ .cosβ.sinθ + L2θ .cosθ.sinα + L2α .sinθ.cosα – L2θ
sinθ.cosα.sinγ – L2. α .cosθ.sinα.sinγ + L2. γ .cosθ.cosα.cosγ (4.12)
y yük = L1. β .cosβ + L2. α .sinα.cosγ + L2. γ .cosα.sinγ (4.13)
z yük = L1. β .sinβ.sinθ – L1.θ .cosβ.cosθ – L2. θ .sinθ.sinα + L2. α .cosθ.cosα +
L2. α .sinθ.sinα.sinγ – L2. θ .cosθ.cosα.sinγ – L2.γ .sinθ.cosα.cosγ (4.14)
x 2= L 1 2. β 2. sin2β. cos2θ + 2.L 1 2. β. θ .sinβ.cosβ.sinθ.cosθ – 2.L 1. L2. β . θ .sinβ.cos2θ.sinα – 2.L1. L2. β. α .sinβ.sinθ.cosθ.cosα + 2.L1. L2. β . θ .sinβ.sinθ.cosθ.cosα.sinγ +
2.L1. L2. β. α. sinβ.cos2θ.sinα.sinγ – 2.L1.L2. β . γ .sinβ.cos2θ.cosα.cosγ + L21. θ 2. cos2β. sin2θ – 2.L
1. L2. θ 2.cosβ.sinθ.cosθ.sinα – 2.L1. L2. θ . α .cosβ.sin2θ.cosα + 2.L1. L2. θ 2.cosβ.sin2θ.cosα.sinγ + 2.L