Makinal
ı
Şekerpancar
ı
Hasad
ı
nda Ba
ş
Kesme S
ı
ras
ı
nda
Ayar Tamburu Yörüngesinin izlenmesini Olanakl
ı
K
ı
lan
Bir Yöntem Geli
ş
tirilmesi
Ahmet ÇOLAK'Geliş Tarihi: 23.06.2001
Özet: Ayar düzenlen' baş kesme derinliğini belirleyen bir ölçü düzlemi oluşturmaktadırlar. Hareketini bir güç kaynağından alan tamburlu ayar düzenlen' ise uygulamada yaygın olarak kullanılmaktadır. Hasat sırasında ayar tamburu ile pancarın teması, tambur kütlesi ve ilerleme hızının da etkili olduğu bir çarpma hareketini beraberinde getirmektedir.
Bu çalışmada, kontrollü koşullardaki bir simülasyonla ayar tamburunun hareket yörüngesinin izlenmesini olanaklı kılan bir yöntem geliştirilmiştir. Geliştirilen yöntemle 0.39, 0.68, 0.98 ve 1.7 m/s ilerleme hızları ile 175 N ve 235 N tambur düşey kuvveti kombinasyonlarında denemeler yapılmıştır.
Denemeler sonunda, hareket yörüngeleri sayısal verilerle elde edilmiş ve grafikleri çıkarılabilmiştir. Ayrıca, 1.7 m/s'lik ilerleme hızının tamburda yaklaşık 20 mm'lik bir sıçramaya neden olduğu belirlenmiştir. Anahtar Kelimeler : Şekerpancarı hasadı, ayar tamburu yörüngesi, hız fazIalığı, simülasyon
The Developing a Method which Makes Possible Analising the Trajectory of
Feeler Wheel During Sugar Beet Topping Using Machine
Abstract: The feelers provide the referance plane to determine thickness of slice during topping. Driven feeler wheel used commonly on sugar beet harvesters. During the topping feeler wheel impact with beet crown. The mass of feeler and forward speed effect on this action.
In this research the method was developed which let to monitor and save the data to PC belonging to trajectory of wheel. Trials were carried out with combination of 0.39; 0.68; 0.98 and 1.7 m/s forward speeds and 175 N and 235 N vertical force of wheel by using developed method in soil canal.
At the result of research the wheel trajectories had been obtained digitally and graphically. Besides, it had been determined that 1.7 m/s forward speed had been caused jump of wheel 20 mm far away.
Key Words: Sugar beet harvesting, feeler wheel trajectory, excess of peripheral velocity, simulation
Giriş
Tarladaki bir pancarın ideal kesim yen ya da baş
kesme için tolerans bölgesi, pancardan pancara değişim
göstermektedir. Kesilen baş dilimi kalınlığı genellikle
büyük pancarda fazla, küçük pancarda ise az olmaktadır.
Makina ile baş kesme sırasında kesim yüzeyinin
pancarın bir boyutundan bulunması ve baş kesme
bıçağının kesim yüzeyine otomatik olarak getirilmesi
gerekmektedir. Bu amaçla sökümden önce baş kesme
yapan bir makinenin pancar tepelerinin topraktan
yüksekliklerini referans olarak kullanması yaygın olan bir
uygulamadır.
Pancarların sıra arası ve sıra üzeri uzaklıkları ile
topraktan yükseklikleri oldukça değişken bir karakter
göstermektedir. Bu durum, değişik yapı ve işlev
özelliklerine sahip baş kesme düzenlerinin doğmasına
neden olmuştur.
Baş kesme düzenleri şeker pancarı hasat
makinelerinin önemli organlarından biri olup başlıca üç
elemandan oluşmaktadır. Bunlar;
• Ayar düzeni,
• Baş kesme bıçağı,
• Bağlantı kollarıdır.
Ankara Üniv. Ziraat Fak. Tarım Makinaları Bölümü- Ankara
Ayar düzenlen baş kesme derinliğini belirleyen bir
ölçü düzlemi oluşturmaktadırlar. Pancarın tepesine
tırmanan ayar düzeninin kesilecek baş dilimi kalınlığı
kadar altında bulunan baş kesme bıçağı, ayar düzeni
pancarın en üst noktasındayken, kesme işlemine
başlamaktadır.
Hareketini bir güç kaynağından alan tırtıllı tamburlu
ayar düzenleri uygulamada yaygın olarak kullanılmaktadır
(Şekil 1).
Şekil tde; Q, tamburun ağırlığını, VT, tambur çevre
hızını, VF ise makinenin ilerleme hızını göstermektedir.
Tambur çevre hızı makine ilerleme hızından daima büyük
olmalıdır. Bu hız fazIalığı tamburun tırmanma sırasında
pancarı devirmemesi ve pancarı bıçağa karşı tutabilmesi
için gereklidir. Tambur çevre hızı (VT) ile makine ilerleme
hızı (VF) arasında;
VT11,1 ...1,5)VF
El
bağıntısı bulunmaktadır (Kanafojski ve Karwowski 1976).
Ayar tamburu hız fazlalığının etkisi pancar başlarının
topraktan çıkma yüksekliklerine göre değişmektedir. Bu
ÇOLAK, A. "Makinalı şekerpancarı hasadında baş kesme sırasında ayar tamburu yörüngesinin izlenmesini olanaklı kılan bir
yöntem geliştirilmesi" 71
VF
T
Şekil 1. Güç kaynağı tahrikli tırtıllı tamburlu ayar düzeninin çalışması
Şekil 2. Ayar tamburu hız fazIalığının pancarların topraktan çıkma
yüksekliklerine göre etkisi (Albrecht 1961)
Şekil 2 a' da olduğu gibi, başları kesilecek olan
pancarların topraktan çıkma yükseklikleri birbirine eşit
olduğunda ayar tamburu doğrusal kabul edilebilecek hafif
bir dalgalanma hareketi ile ilerlemektedir. Bu durumda hız
fazIalığı tüm çevre boyunca etkili olmakta ve ayar tamburu
görevini tam olarak yapmaktadır.
Şekil 2 b' de ise topraktan çıkma yüksekliği bir
öncekinden fazla olan bir pancara doğru yönelen ayar
tamburunun çalışması görülmektedir. Tambur yüksek
pancara değme noktasından itibaren bir yay çizerek
pancar tepesine tırmanmaya zorlanmaktadır. Yükselme
durumunda hız diyagramında sapma meydana gelmekte
ve pancarlar arasındaki yükseklik farkının derecesine de
bağlı olarak hız fazIalığı daha az etkin olmaktadır. Yüksek
bir pancarın tepesinden aşağıya inme durumunda ise
(Şekil 2 c) hız fazIalığı yeniden ilk durumdaki etkinliğine
dönmektedir. Hız fazIalığının küçük olması durumunda
devrilme, eğik kesme ve pancarların kesilmeden
sökülmesi; çok büyük olması durumunda ise derin kesim
ve parçalanma gibi hasat kalitesini olumsuz etkileyen
durumlar ortaya çıkmaktadır.
Ayar tamburu ile pancarın teması; tambur kütlesi ve
ilerleme hızının da etkili olduğu bir çarpma hareketini
beraberinde getirmektedir (Şekil 3).
FRy
Şekil 3. Ayar tamburunun pancara çarpması sırasında oluşan
kuvvetlerin, açıların ve hızların ilişkisi (Umari ve
Brinkmann 1978)
Çarpma olayı sırasında ortaya çıkan toplam kuvvetin
(FR) yatay bileşeni FRx tırtıllı tambur için aşağıdaki eşitlikle verilebilmektedir:
2
m TVF sin
• (in P
FR x = 2ris
Eşitlik [2] ve Şekil 3'de; FR : Toplam kuwet,
FRx : Toplam kuwetin yatay bileşeni,
FRy : Toplam kuwetin düşey bileşeni,
VF : ilerleme hızı,
VT : Tambur çevre hızı,
mT : Ayar tamburunun kütlesi,
P : Ayar tamburu tahrik gücü,
S : Pancarın deformasyonu,
: Ara teğet açısı,
: Pancarla çelik arasındaki sürtünme açısı,
Tl : Pancarın yutma faktörü,
: Bağlantı kolunun yatayla yaptığı açı
olmaktadır.
Ayar tamburunun bir pancara çarpması sırasında
tambur üzerine yukarıya doğru dikey bir kuwet etkili
olmaktadır. Bu kuvvet tamburun pancar başından aniden
kalkması, dolayısıyla temasın kesilmesi tehlikesini
doğurmakta ve hatalı kesimler meydana gelmektedir.
Çarpma sonrasındaki ayar tamburu konumları Şekil 4' de
görülmektedir. Şekil 4' de;
SH : Sıçrama yüksekliği,
SW : Sıçrama genişliği,
ASH : Sıçrama yüksekliği farkı,
ASW: Sıçrama genişliği farkı
olmaktadır.
Uygulamada tarla koşullarında ayar sisteminin
çarpma ve sıçrama ilişkilerini tam olarak izleyebilmek
oldukça güç olmaktadır. Bu nedenle kontrollü koşullardaki
bir simülasyonla ayar tamburunun hız ve kütleye bağlı
hareketinin izlenmesini olanak!ı kılan bir yöntem
geliştirilmesi çalışmanın amacı olmuştur.
GENIE 3.00 yazılımı
14-
".xls dosyası * txt dosyası Tırtıllı ayar tamburuŞekil 7. Data toplama ve işleme sistemi
Transducer
Şekil 4. Tırtıllı ayar tamburunun çarpma sonrasında konumları
(Umari ve Brinkmann 1978)
Materyal ve Yöntem
Çalışmada Ankara Üniversitesi Ziraat Fakültesi Tarım Makinaları Bölümü Toprak işleme Aletleri
Laboratuvarında bulunan toprak kanalından
yararlanılmıştır. Çeşitli çaplardaki pancarlar toprak kanalına (TK) değişik çıkma yüksekliği ve sıra üzeri uzaklığı verecek şekilde sabitlenmiştir. Böylece tarla ortamını simüle eden bir pancar sırası oluşturulmuş ve pancarlar numaralanmıştır.
Diğer yandan toprak kanalı arabası (TKA) üzerindeki üç nokta bağlantı sisteminin alt bağlantı kollarına (ABK) kendi çatısına (ATÇ) rulmanlı yataklarla yataklanmış bir ayar tamburu (TAT) bağlanmıştır. Ayar tamburu kanal arabası şasisine bağlı ve yukarı hareketi özel bir yay sistemi ile baskılanmış olan 30 cm çapında kauçuk bir tahrik tekerleği (KT) tarafından hareketlendirilmiştir. Ayar tamburunun yapısı ve ölçüleri Şekil 5'de görülmektedir.
Şekil 5. Denemelerde kullanılan tırtıllı ayar tamburunun yapısı ve ölçüleri
Hareketin, kauçuk tekerlekten ayar tamburuna aktarılması bir zincir-dişli sistemi (ZDS) tarafından sağlanmıştır. Kullanılan zincirin uzunluğu harekete izin verecek en büyük değere ayarlanmıştır. Böylece, tamburun yukarı-aşağı hareketi tahrik tekerleği tarafından engellenmemiştir.
Tamburun pancar üzerine tırmanması ve inmesi indüktif bir yol ölçer (YÖ) tarafından algılanarak bilgisayara kaydedilmiştir. Indüldif yol ölçerin hareketli çubuğu, tambur çatısına, tambur mili hizasında olacak ve tamburun yörüngesine uygun hareket edebilecek serbestlikte bağlanmıştır. Yol ölçerin ana gövdesi ise hareketli çubuğun yörüngesine uyumlu olacak serbestlikte, kanal arabasının şasisine cıvatalarla sabitlenmiş, yatay bir bağlantı lamasına (BL) yataklanmıştır. Deney düzeneği
Şekil 6'da görülmektedir.
Denemelerde veri aktarımı ve kaydedilmesi Şekil 7'deki gibi gerçekleştirilmiştir.
Tamburun hareketlerini algılayarak elektriksel büyüklüklere dönüştüren indüktif yol ölçer; verileri kesintisiz olarak bir ara kablosu arcılığıyla bir yükselticiye (amplifıer), oradan da PCL 818 HG karta sahip bir veri işleme sistemine iletmiştir. PCL 818 HG ise analog verileri sayısal veriler haline dönüştürerek PC bilgisayara aktarmıştır. Verilerin bilgisayara kaydedilmesinde GENIE 3.00 yazılım programı kullanılmıştır.
Şekil 6. Toprak kanalında oluşturulan deneme sistemi
2200 22041 2400 2500 2500 2700 2500 2000 zıo0 2200 2300 2400 2500 2600 2700 2000 2100 2200 2300 24. 2500 2600 Yol (mm) Yol (mm) Yol (mm) 10 E E !?- 110 100 90 80 70 60 :g 30 20 10 O 2200 2400 2600 2800 3000 Yol (mm) a1=175 N VF1=0,39 mis a2=235 N VF1=0,39 mis 110 00 2". „' E 70 50 . . .7 ›- "10 2000 00 2z00 2300 2400 2500 2600 2700 Yol (mm) a1=175 N VF2=0,69 mis 60 O 4. 2000 2100 2200 2300 2400 2500 2600 2700 Yol (mm) a2=235 N VF2=0,68 nYs a1=175 N VF3=0,98 mis 400 2500 2600 2700 .00 Yol (mm) a2=235 N VF3=0,98 m/s a1=175 N VF4=1,70m/s 20 1: 25002500270025002900300031003200 3300 Yol (mm) a2=235 N VF4=1,70 mis Yüks e kl ik ( rr ı m 60
ÇOLAK, A. "Makinalı şekerpancarı hasadında baş kesme sırasında ayar tamburu yörüngesinin izlenmesini olanaklı kılan bir
yöntem geliştirilmesi" 73
Denemelere başlanmadan önce; tamburun toprak yüzeyine temas ettiği nokta referans alınarak, 2 cm kalınlığında ahşap bloklar yardımıyla, tamburun yükselmesi ve GENIE 3.00 dosyasına kaydedilen değerlerin kalibrasyonu gerçekleştirilmiştir.
Denemelerde toprak kanalı arabasında sağlanabilen 0.39; 0.68; 0.98 ve 1.7 m/slik ilerleme hızları ile 175 N ve 235 N'Iuk tambur düşey kuwetleri esas alınmıştır. Kauçuk tekerlek ile tambur arasındaki iletim oranı i=1,16'dır. Tambur çevre hızı ile ilerleme hızı arasındaki (VTNF) hız oranı ise 1,29 olmuştur. Hız ve kütle faktörlerinin oluşturduğu 8 kombinasyonda denemeler yapılarak ölçümler kaydedilmiştir.
Bulgular ve Tartışma
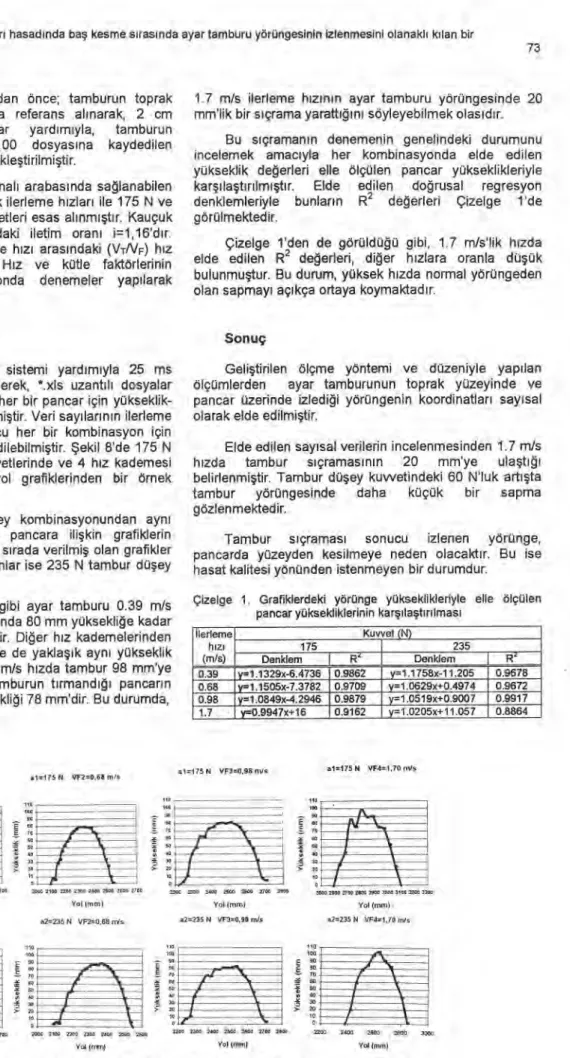
Veri ölçüm ve işleme sistemi yardımıyla 25 ms zaman aralıklarında kaydedilerek, *.xls uzantılı dosyalar haline dönüştürülen verilerle her bir pancar için yükseklik-veri sayısı grafikleri elde edilmiştir. Veri sayılarının ilerleme hızları ile düzeltilmesi sonucu her bir kombinasyon için yükseklik-yol grafikleri elde edilebilmiştir. Şekil 8'de 175 N ve 235 N tambur düşey kuvvetlerinde ve 4 hız kademesi için elde edilen yükseklik-yol grafiklerinden bir örnek görülmektedir.
Şekil 8, sekiz ayrı deney kombinasyonundan aynı
numaralı (şekilde 12 nolu) pancara ilişkin grafiklerin seçilmesiyle derlenmiştir. Üst sırada verilmiş olan grafıkler 175 N, alt sırada verilmiş olanlar ise 235 N tambur düşey kuwetinde elde edilmişlerdir.
Şekil 8'den anlaşıldığı gibi ayar tamburu 0.39 m/s hızla 12 nolu pancara çarptığında 80 mm yüksekliğe kadar tırmanan bir yörünge izlemiştir. Diğer hız kademelerinden 0.68 ve 0.98 m/s değerlerinde de yaklaşık aynı yükseklik sözkonusu olmuş, ancak 1.7 m/s hızda tambur 98 mm'ye kadar yükselmiştir. Oysa, tamburun tırmandığı pancarın elle ölçülen topraktan yüksekliği 78 mm'dir. Bu durumda,
1.7 m/s ilerleme hızının ayar tamburu yörüngesinde 20 mm'lik bir sıçrama yarattığını söyleyebilmek olasıdır.
Bu siçramanın denemenin genelindeki durumunu incelemek amacıyla her kombinasyonda elde edilen yükseklik değerleri elle ölçülen pancar yükseklikleriyle karşılaştırılmıştır. Elde edilen doğrusal regresyon denklemleriyle bunların R2 değerleri Çizelge 1'de görülmektedir.
Çizelge 1'den de görüldüğü gibi, 1.7 mistik hızda elde edilen R2 değerleri, diğer hızlara oranla düşük bulunmuştur. Bu durum, yüksek hızda normal yörüngeden olan sapmayı açıkça ortaya koymaktadır.
Sonuç
Geliştirilen ölçme yöntemi ve düzeniyle yapılan ölçümlerden ayar tamburunun toprak yüzeyinde ve pancar üzerinde izlediği yörüngenin koordinatları sayısal olarak elde edilmiştir.
Elde edilen sayısal verilerin incelenmesinden 1.7 m/s hızda tambur sıçramasının 20 mm'ye ulaştığı
belirlenmiştir. Tambur düşey kuwetindeki 60 N'luk artışta tambur yörüngesinde daha küçük bir sapma gözlenmektedir.
Tambur sıçraması sonucu izlenen yörünge, pancarda yüzeyden kesilmeye neden olacaktır. Bu ise hasat kalitesi yönünden istenmeyen bir durumdur.
Çizelge 1. Grafiklerdeki yörünge yükseklikleriyle elle ölçülen pancar yüksekliklerinin karşılaştırılması
ilerleme hızı (m/s) Kuvvet (N) 175 235 Denklem R2 Denklem R2 0.39 y=1.1329x-6.4736 0.9862 y=1.1758x-11.205 0.9678 0.68 y=1.1505x-7.3782 0.9709 y=1.0629x+0.4974 0.9672 0.98 y=1.0849x-4.2946 0.9879 y=1.0519x+0.9007 0.9917 1.7 y=0.9947x+16 0.9162 y=1.0205x+11.057 0.8864
Kaynaklar
Albrecht, E. H. 1961. Beitrag zur Konstruktiven auslegung von rübenköpfelementen. Grundlagen der Landtechnik, 13, 54-59, Bonn.
Çolak, A. 1990. Şeker Pancarı Baş Kesme Bıçakları Çalışma
Koşullarını Etkileyen Temel Karakteristiklerin Tarla
Koşullarında Saptanmasına İlişkin Yöntem Geliştirilmesi. Ankara Üniv. Fen Bilimleri Enst. Doktora Tezi, Ankara. Kanafojski, Cz. and T. Karwowski, 1976. Agricultural Machines,
Theory and Construction. Vol.2, 1046 p., Varsaw, Poland.
Olbrich, A. und P. Jakob, 1987. Maschineneneinstellung und verbesserung der köpfqualitat der zuckerrübenköpflader 6- ORCS/SC 1-03 und SC 1-04. Agrartechnik, 10, 442-445, Berlin.
Umari, M. und W. Brinkmann, 1978. Zum köpfen der zuckerrüben mit rad-und schleiftastköpfern. Zuckerindustrie, 103, 665- 675, Berlin.
Wormanns, G. 1976. Zusammenhange zwischen
standraumzumessung und köpfqualitat bei zuckerrüben. Agrartechnik, 4, 179-181, Berlin.