Koordinatlarda geometrik konveks fonksiyonlar için integral eşitsizlikler
Tam metin
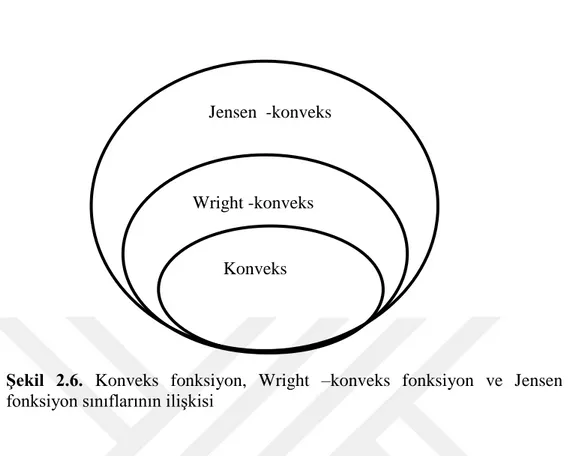
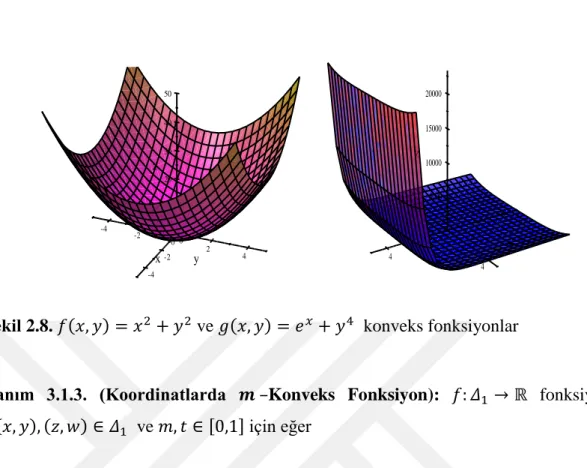
Şekil

Outline
Benzer Belgeler
Bu çalışmada, Türkiye' de yaşanan ekonomik krizlerin ardından 1980-1999 yılları arasında uygulanan ekonomik istikrar tedbirlerinin sosyal politikalara,
This chapter reported the results of the pre- and post-questionnaires and interviews which were conducted to investigate the effect of using portfolio as a self- assessment tool
Bu başlıklar sırasıyla, çağdaşlaşmanın başlatıcıları ve uygulayıcıları olarak bürokrasi ve siyaset; çağdaşlaşmanın savunucuları olarak aydınlar;
Tablo 16: Araştırmaya Katılan Turizm İşletme Yetkilileri Perspektifinden Ekoturizm Potansiyeli Bakımından Bartın İlinin Zayıf Yönleri………...76 Tablo 17:
Basamaklandırılmış ters yüz öğrenme modelinin öğrenci merkezli bir eğitim anlayışına sahip olması, öğrenme sorumluluğunu öğrenciye vermesi ve süreç içinde
Methods: We analyzed blood gas data in patients that underwent cardiopulmonary arrest out-of-hospital, had intervention by an ambulance first-aid team and Then were
Bu amaçla Teucrium türlerinin incelen populasyon örneklerinin uçucu yağ analizleri sonucunda elde edilen kalitatif ve kantitatif bileşenlerden major olarak seçilen 20
Reklamın hedef kitlesi olarak çocuklar üzerindeki etkileri ve televizyon reklamlarında çocuk kullanımının etkilerinin değerlendirilmekte ve özellikle çocuk bedeni
