··
's
-«и ν·'5^·:.;..-: ..
^
%✓ -.,ν,ΜΤ
«,*-'
■»:
J
.■ ..
XON-INTERIOR PIECEWISE-LLXEAR PATHW AY'S
TO
SOLUTIONS OF OVERDETERMIXED
LINEAR SYSTEMS
A THESIS
SUBMITTED TO THE DEPARTMENT OF INDUSTRIAL
ENGINEERING
AND THE INSTITUTE OF ENGINEERING AND SCIENCE
OF BILKENT UNIVERSITY
IN PARTIAL FULFILLMENT OF THE REQlTRExMENTS
FOR THE DEGREE OF
MASTER OF SCIENCE
By
Samir Elhedhli
June, 1996
Jamie....
i// J
I certify that I have read this thesis and that in my opinion it is fully adeciuate.
in scope and in quality, as a thesis for the degree of .Master of Science.
Pınar
(,\d visor)
I certify that I have read this thesis and that in my opinion it is fully adequate,
in scope and in quality, as a thesis for th^e degree of Master of Science.
I certify that I have read this thesis and that in my opinion it is fully adequate,
in scope and in quality, as a thesis for the degree of Master of Science.
Assist. Prof. Tuğrul Dayar
.Approved for the Institute of Engineering and Sciences:
Prof. Mehmet Krttay
(9л
(i 4-6.4
ABSTRACT
X O N -IN T E R IO R P I E C E W IS E -L IX E A R P A T H W A Y S T O
(y,
S O L U T IO N S O F O V E R D E T E R M IX E D L I X E A R S Y S T E M S
Samir Elhedhli
M .S. in Industrial Engineering
Supervisor: Assist. Prof. M ustafa Ç . Pınar
June. 1996
In this thesis, a new characterization of
solutions to overdetermined sys
tems of linear equations is described based on a simple quadratic penalty func
tion, which is used to change the problem into an unconstrained one. Piecewise-
linear non-interior pathways to the set of optimal solutions are generated from
the minimization of the unconstrained function. It is shown that the entire
set of
solutions is obtained from the paths for sufficiently small values of
a scalar parameter. As a consequence, a new finite penalty algorithm is given
for fx, problems. The algorithm is implemented and exhaustively tested us
ing random and function approximation problems. .A comparison with the
Barrodale-Phillips algorithm is also done. The results indicate that the new
algorithm shows promising performance on random (non-function approxima
tion) problems.
Key words:
Optimization; Overdetermined Linear Systems, Quadratic
Penalty Functions, Characterization.
ÖZET
D O Ğ R U S A L ^oc P R O B L E M İ İÇ İN BİR P A R Ç A L I
D O Ğ R U S A L DIŞ N O K T A A L G O R İT M A S I
Saınir Elhedhli
Endüstri Mühendisliği Bölüm ü Yüksek Lisans
Tez Yöneticisi: Yrd. Doç. Mustafa Ç. Pınar
Haziran, 1996
Bu tez çalışmasında, doğrusal
problemi için yeni bir algoritma önerilmiştir.
Algoritma karesel bir ceza fonksiyonunun problemin doğrusal programlama
formülasyonuna uygulanması ile elde edilmiştir. Karesel ceza fonksiyonunun
çözüm kümesi parçalı doğrusal bir yol izleyerek esas problemin ( ) çözüm
kümesine ulaşır. Algoritmanın sonlu sayıda adımda optimal çözüme ulaştığı
gösterilmiştir. .Algoritma bilgisayarda programlanmış ve değişik problemler
üzerinde denenmiştir. .Ayrıca optimizasyon literatüründe en iyi bilinen Barrodale-
Phillips simplex algoritması ile karşılaştırılmıştır.
Anahtar sözcükler:
Problemi, Doğrusal Sistemler, Karesel Ceza Fonksiy
onu, Çözüm Kümesi Karakterizasyonu.
ACKNOWLEDGEMENT
I am indebted to Assist. Prof. Mustafa Ç. Pınar for his invaluable guidance,
encouragement and the enthusiasm which he inspired on me during this study.
I am also indebted to Assoc. Prof. Mustafa Akgül and Assist. Prof. Tuğrul
Dayar for showing keen interest on the subject matter and accepting to read
and review this thesis.
I would like to thank my office mates Alev Kaya and Murat Bayiz for their
patience and moral support.
I would like also to thank Abdullah Daşçı for his help during the preparation
of this thesis.
Finally, I would like to thank Fatma Gzara for everything.
Contents
1 Introduction
2
2 Literature Review
3
2 . 1
Historical Background ...
3
2 .2
The Algorithm of Barrodale and Phillips (1 9 7 -5 )...
4
2.3
The Algorithm of Bartels, Conn and Charalambous (1978) . . .
5
2.4
The Algorithm of Ruzinsky and Olsen (1989)
6
2.0
The .Algorithm of Coleman and Li (1 9 9 2 )...
S
2.6
Zhang’s -\lgorithm (1993)
9
3
A Quadratic Penalty Function Approach
11
3.1
Introduction...
1 1
3.2
Pathways To
Solutions
13
3.2.1
The Minimizers of F
...
14
3.2.2
Characterization of
S o lu t io n s ...
17
3.3
Extended Binary V ectors... 24
CONTENrS
vm
3.3
. 1
Behavior of the Set of Minitnizcrs near t he Feasible Bound
ary
2.5
3.4
The Penalty .Algorithm...
28
3.4.1
Computing an Unconstrained M in im ize!·...
>9
3.4.2
Reducing t ...
3
q
3.5
Finite C onvergence...
3
[
4 Example
34
5 Numerical Issues and Implementation
38
5 .1
The Penalty A lgorithm ...
3 3
5.1.1
D e s crip tio n ...
3 3
5.1.2
Computing a minimizer of F (jr,y ,t)
39
5.1.3
Line S e a r c h ...
4 1
5.1.4
Reducing t ...
42
5.2
Implementation and Linear A lg e b ra ...
44
6
Numerical Testing
46
6.1
The Test P ro b le m s ... 46
6.2
Behavior of the algorithm ...
4
§
6.3
Initialization...
5 3
CONTENTS
7 Conclusion
IX
List of Figures
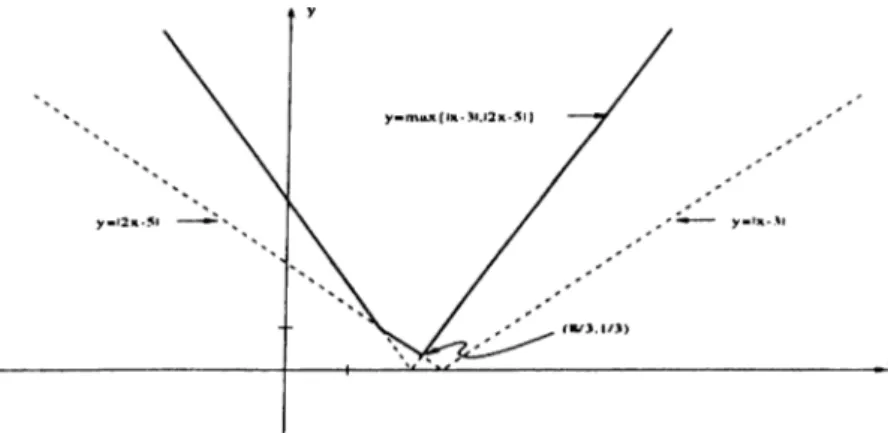
4.1
Plot of the function max(|r — 3|. |2jr — 5|)...
.34
4.2
The division of
according to the values of 0 i and
0 2
.
35
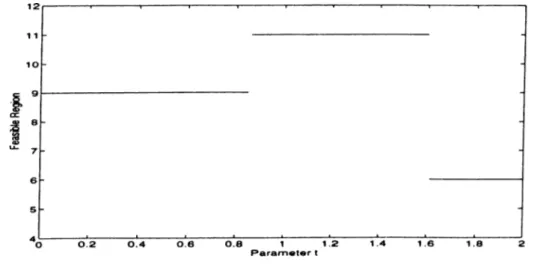
4.3
The region that contains the minimizer for different values of
t.
36
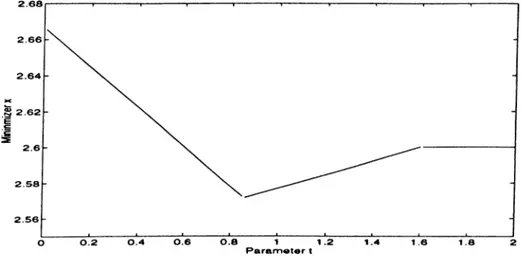
4.4
The minimizer x as a function of t ...
37
4.5
The minimizer
y as, s.
function of t ...
37
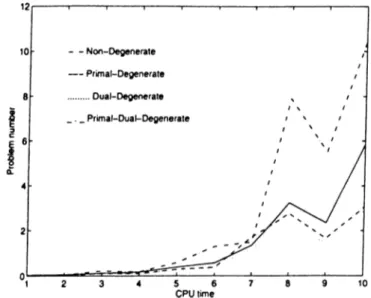
6.1
CPU time on nondegenerate, primal, dual and primal-dual de
generate problems...
51
6.2
Comparison of the different initialization schemes of to...
63
6.3
CPU time comparison between LINFSOL and B-P for nonde
generate problems... 63
6.4
CPU time comparison between LINFSOL and B-P for different
ratios of m to n on nondegenerate problems.
64
6.5
CPU time comparison for primal degenerate problems...64
6.6
CPU time ratio versus m to n ratio for primal degenerate prob
lems... 65
6.7
CPU time comparison for dual degenerate problems.
65
LIST OF FIGURES
XI
6.8
CPU time ratio versus m to
n
ratio for dual degenerate problems.
66
6.9 CPU time comparison for primal-dual degenerate problems.
66
6 .1 0
CPI time ratio versus
m
to
n
ratio for primal-dual degenerate
problems...
g j
Xl l
Glossary of Symbols and Notations
X
y
(■■»·, i/)
cL
a,
T
e
^ n + l
0
F{ z , t )
b
/1
0
Q
p
P
vector of length n.
scalar (€ -R).
pair of vector
x
and scalar
y.
(n
+ l)-vector with
Z{
=
X{
for i =
1
, ..,n and
=
y.
(n
+ l)-vector with d,; =
for
i =
and
=
dy.
j-th column of matrix
A.
¿-th row of matrix
A.
vector of all I ’s of appropriate length, i.e, e ^ = ( l ,
1
)^.
(n + l)-vector with
Ci = 0
for
i =
1
,
..,n
and e„+i =
1
.
vector or matrix of zeroes of appropriate length.
=
F { x , y , t ) = Ft{x,y).
277
r-vector of the form ^ , where
b
G R '".
(2m)
X
(n + l)-m atrix of the form
- A - e
A - e
01
_0
0
02
where
0
i and
0 2
are
(2m
X
2m) matrix of the form
771
X
m matrices.
(2m)
X
(n + l)-m atrix which is equivalent to 0 A .
(?2 +
1)
X (?2 +
l)-m atrix which is equivalent to
Q ^ Q .
Chapter 1
Introduction
The
problem has many applications in a wide range of fields, and for
that reason, fast, accurate and stable methods to solve it were all the time
sought. The first attempts seem to have been made by statisticians cis the
problem arises frequently in data fitting analysis. More efficient ways, however,
were designed when it was realized that the problem is equivalent to a linear
program, and , hence it can be solved via any linear programming method.
Since then, the solution approaches w'ere following developments in linear
programming. Barrodale and Phillips [
1
] designed a simplex-like method in
which the special structure of the coefficient matrix is exploited. .After Kar-
rnarkar's outstanding paper which opened the area of interior-point methods.
Ruzinsky and Olsen [14] used the same ideas to design a polynomial algorithm
for the
problem. Later, large developments in the interior-point area led to
the solution method of Zhang [16], where an affine scaling approach is used.
.Again, in this thesis, the linear programming formulation of the
problem
is used. The constraints are coupled with the objective function through the
use of a simple quadratic penalty function and a smoothing parameter. In
theory, a .solution to the original problem could be obtained from a solution
to the unconstrained problem w'hen the parameter tends to zero. It is shown,
however, that it is not necessary to let the parameter converge to zero and that
C H A P T E R 1. INTRODUCTION
there is a threshold value, for which a solution could be detected. This remark
is essential both for the efficiency and the numerical stability of the designed
algorithm. The approach could be termed as an
exterior point
approach, as
a .seci’uence of non-interior iterates is generated that satisfies primal feasibility
only upon termination.
The organization of the thesis is as follows. In the ne.xt chapter a summary
of the most known algorithms for the
tx,
problem is given. Then a new char
acterization of the solution set is done in the third chapter, followed with a
numerical example in the fourth chapter. Chapter five is devoted to the anal
ysis and design of the algorithm. Numerical testing and a comparison with
the Barrodale-Phillips algorithm is provided in the fifth chapter. The thesis
concludes with some remarks and suggestions for future research.
Chapter 2
Literature Review
2.1
Historical Background
The
approximation problem is to find or € /2” that minimizes
||
j
4
i
— 6 ||oo = rnax
\afx
— 6 ,|
1 = 1 ..m
where
A
€
with columns
aj
and rows
a j
and
b .y ^
/2'” .
The problem is also known as
minimax
or the
Chebychev
approximation prob
lem, and is believed to have been first posed by the French mathematician
Laplace
in 1799 in a study of inconsistent linear systems . However the Rus
sian mathematician
Chebychev
seems to be the first to have studied deeply
such class of problems in the 1850’s [15].
One of the first systematic methods to solve the
problem was due to Stiefel
(1959), who points out that for a subset J of n -h
1
indices ( among the
2 m
),
either
min max
\ajx
—
6
,| < min max
\ajx
—
6
,|
j-eft"
i e J
x e / ? " i = i . . m ' ‘
'
or, an other subset
J*
of indices can be formed from
J
by interchanging one
index, so that
min max
\ajx —
6
,| < min max jafx —
6
,|.
CU.\rTI-R 2. LITERArURE REVIEW
riie method which he called the
Exchange Method
[13] is similar in principal
to the simplex method, as n +
1
equations among the
2m .
1
''^ “ 'J j^^'j =
are
solved for at a time. Then either max.^j |/·,(J·)| < max
,¿7
|/·,(.r)| and optimality
is reached, or an exchange is made. The method requires that at each step the
matrix picked from
>s of full rank.
■\mong the first to notice that the
problem could be formulated as a linear
program was Zuhovitzki in the 1950’s [15], who used the primal formulation.
min y
[LIA F L P ]
s.t
Ax — ye < b
Ax A ye > b
to design an algorithm. Kelley (1958), however was the first to use the dual
formulation
max
b^(v — u)
s.t
A'^(
v
—
u
) =
0
e^(u
+ i’) =
1
u,
V
>
0
which decreases the size of the problem and puts it directly into a standard
form. In the late 1960’s versions of the simplex method were designed for the
problem, the first of which is due to Barrodale and Young (1966) and Bartels
and Golub (1968) [15].
[ L IN F L D ]
2.2
The Algorithm of Barrodale and Phillips
(1975)
Barrodale and Phillips [1] use a modified simplex algorithm that exploits the
special structure of
[ L IN F L D ] .
Like the simplex algorithm, their algorithm
moves from one vertex to a neighboring one that provides a decrease in the
objective function. The structure of the problem, however, makes the exchange
of u, and
Vi
easy to accomplish. Consider the constraint matrix
, the
columns corresponding to u, and i>, are ["j*'] and
respectively, and suppose
that the basis contains the variables ( x i , ...,
u·} and the ( n +
1
) x (n +
1
)-niatrix
B
= [ w i,..., w „, w„+i] where w 's
j =
L ..,n are columns of length
n
+
1
and w„+| =
and that r, will take the place of «, in the basis, then
instead of solving
n
r
-«i
ni A P T E R 2. LITERATURE REVIEW
r>
we solve
In other words.
is solved instead of
L
+
;=i
7 =
1
B x = —Vi
» , =
0
,
c, =
0
.
B x = Ui
where
B
= [ w i , w „ ] , and thus if
B~^
exists, then it is easy to solve for the
second system.
In the first phase of the algorithm, artificial variables are introduced and are
taken in the basis, then only variables « ,'s are allowed to enter the basis in
place of the artificial variables. At the end of the first phase, a basic feasible
solution is found where n + 1 constraints hold with equality. At that point,
the ordinary simplex algorithm is applied until optimality is reached.
2.3
The Algorithm of Bartels, Conn and Char-
alambous (1978)
This algorithm [2] is based upon solving the linear programming formulation
[LINFLP] through the use of an exact penalty function. Let [LINFLP] be
written as,
min
C
q
W
CIIAFTEIi 2. LITERATURE REVIEW
whcro.
Co
c. =
0,
1
- a .
t
^rn + i
---
.
/ -
1
... m.
^11
0m+i
— ^
1
·
ZO =
For a fixed parameter /z > 0, they define an unconstrained function,
2m
p{w, ¡/)
=
i
'C
q
W —
^ min(0,
c j w
—
3j),
j=i
(2.1)
and prove that for decreasing values of t/, a solution to [LINFLP] can be got
from a minimizer of
2 . 1
when
u
tends to zero.
The minimization of 2.1 is done through the choice of a descent direction
(null space projected gradient) and the computation of a step size (line search).
If a minimizer of 2.1 is detected for which primal feasibility is satisfied then
that solution is optimal. Otheriwse, if any of the constraints are violated then
1
/
is reduced and the function
p
is again minimized starting from the previous
point. Obviously, the algorithm needs a good starting point, and that was
mainly the subject of [-3].
2.4
The Algorithm of Ruzinsky and Olsen (1989)
This algorithm is a variant of Karmarkar’s algorithm applied to the dual linear
programming formulation [LINFLD], which evolves through the interior o f the
c u . \ P T K R 2 .
UTER.VrURE REVIEW
feasible region. It is mainly a rescaling technique coupled with a projected
gradient method. Putting [LINFLD] in a standard form, yields.
where.
A =
m in
c^x
s .t
Ax = b
X > 0 ,
.4 ^
- . 4 ^ '
r
;
i
=
1
^
—
0
1
c =
- b
b
X
=
u
V
The initial point is chosen as
wq
= Co —
*
A:th iteration,
Kar-niarkar would rescale the problem so that e is the center of the feasible region,
solve a weighted least squares problem to find a search direction, compute a
step size and update the primal variable until the duality gap is closed. This is
exactly what Ruzinsky and Olsen [14] did, the only difference is in the stopping
criteria. The algorithm is the following.
• In itialize:
u
v —
some small positive number.
• Itera te:
-
f = [u
1
-
i f ] ,
- r»:=diag(u ? + y2)^
d =
“ '^•=[[/^.4] [0 °j [/rj)"'[(/rj [o<?][/k]]’
-
r:=b — Ax,
- if
1
+
<
e
then
stop.
- else
* ¿1 := [nf(—
— r,)j; 62:=[vf(—clf^r + ri)], {Search direction}
* ^
wa.\(max,(-St,/u,),max,(S2,/v,) ’
(Step size)
* u : = u + Jb i; v .—v A ^$2,
(Update)
• Until
stop.
(Rescaling matrix)
(Least squares)
(Residual vector)
(Stopping criteria)
CUMn'ER 2. LITERATI RE REVIEW
2.5
The Algorithm of Coleman and Li (1992)
C o l e m a n a n Li [
4
] u s e a f o r m u l a t i o n o f t h e
p r o b l e m t h a t is b a s e d u p o n t h e
n u ll s p a c e o f .
4
. P r e c i s e l y , t h e y c o n s i d e r t h e ( m
— n)
x m m a t r i x
Z
w it h r a n k
(ni — n)
s u c h t h a t
AZ
= 0 t o f o r m u l a t e t h e p r o b l e m a s:
m in ||r||.:.; =
<t>{r)
Zr = Zb
m m
y
Zr = Zb
- y e
< r < ye
a s r = .
4
j
· —
b
le a d s t o
Zr = ZAx — Zb
a n d
Zr = Zb.
T h e f u n c t i o n
4
>{r)
is
n o n - d i f f e r e n t i a b l e a t t h e p o i n t s r w h e r e m o r e t h a n o n e r e s id u a l h a s m a x i m u m
m a g n i t u d e .
A s s u m e t h a t t h is is n o t t h e c a s e , a n d t h e r e is o n l y o n e i n d e x
j
f o r w h ic h |rj| = ||r||co; t h e n
6
{r)
is d i f f e r e n t ia b l e in t h e n e i g h b o r h o o d o f
t h e c u r r e n t p o i n t
r
a n d t h e n e a r - b y n o n - d i f f e r e n t i a b l e r e g io n is d e fin e d b y
lo l =
1
^·! f®*·
^ ^ j
-B y d e fi n in g ,
Ci=Sjrj-Siri i ^ j
a n d
= |r_,|e - | r|-|-Ir^lcj = T - V ,
w h e r e s = s i g n ( r ) a n d T is a s i m p l e e l e m e n t a r y m a t r i x d e f i n e d b y :
T
— [
S i e j , . , ,
Sj _ i C j—1. s ,
T h e n p r o b l e m b e c o m e s .
m in IIT cIloo
ZTc = Zb.
T h e a l g o r i t h m t h e n p r o c e e d s w i t h f in d in g a d e s c e n t d i r e c t i o n
d
u s in g a w e ll
c h o s e n c r i t e r i a s o t h a t b o t h g l o b a l c o n v e r g e n c e a n d t h e a b i l i t y t o c r o s s lin e s o f
n o n - d i f f e r e n t i a b i l i t y a r e e n h a n c e d ,
d =
-A{A^T-'^D-^T-\A)-^A'^9,
(
7/.
\PTEll 2. LITERATURE REVIEW
w h e r e
g = SjCj.
T h e c h o i c e o f
D
is d o n e in a w a y s o t h a t n e a r t h e s o lu t i o n
u n it X e w t o n s t e p s a r e t a k e n , a s
w i t h C ’ = d i a g ( c ) a n d
is a v a r i a b le t h a t e n c a p s u l a t e s t h e o p t i m a l i t y c o n d i t i o n s
a n d t e n d s t o z e r o a s t h e s o l u t i o n is r e a c h e d .
T h e n e x t s t e p is t o p e r f o r m a lin e s e a r c h a lo n g
d.
In o t h e r w o r d s . o ( r + a d )
is m i n i m i z e d w i t h r e s p e c t t o a . T h i s is d o n e b y c o n s i d e r i n g e a c h b r e a k p o in t
in t u r n , a d j u s t i n g t h e g r a d i e n t t o r e f le c t
a
s t e p ju s t b e y o n d t h e b r e a k p o i n t a n d
c h e c k i n g i f
d
c o n t i n u e s t o b e a d e s c e n t d i r e c t i o n . F i n a l ly
r
a n d A , ( t h e d u a l
v a r i a b l e ) a r e u p d a t e d a s,
r"*·
= r + ad
a n d
A"*· = ^ +
T~^D~^T~^d.
In b r i e f , t h e a l g o r i t h m s t a r t s b y a fe a s ib le p o in t
tq
s u c h t h a t
Zro
=
Zb,
m a k e s a r e s c a l in g t r a n s f o r m a t i o n , c o m p u t e s a s t e p s iz e u s in g a lin e s e a r c h a n d
p r o c e e d s i t e r a t i v e l y u n t il r e a c h i n g o p t i m a l i t y . T h e m a in w o r k in t h e a lg o r it h m
is d o n e in t h e s o l u t i o n o f t h e le a s t s q u a r e s p r o b l e m s .
2.6
Zhang’s Algorithm (1993)
■As t h e
7
.x, p r o b l e m is e q u i v a l e n t t o a lin e a r p r o g r a m . Z h a n g [
16
] u.ses a p r im a l-
d u a l i n t e r i o r p o i n t m e t h o d t o s o lv e f o r [ L I N F L P ] a n d [ L I N F L D j. T h e K a r u s h -
K u h n - T u c k e r o p t i m a l i t y c o n d i t i o n s c a n b e w r it t e n eis:
A^{u — v)
e^(u + u) —
1
F{p,q,u,v,i,y) =
pA Ax — yt — b
q
—
Ax — ye + b
Up
Uq
= 0 ,w h e r e
U
= d i a g ( u ) a n d
V
= d i a g ( u ) a n d
(p,q,u,v) >
0
.
CllAPTKR 2. LITERATURE REVIEW
1 0