T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
MOBĠL VĠNÇ ROBOT KABĠNĠN TASARIMI VE ANALĠZĠ
Mustafa KARAGÖZ YÜKSEK LĠSANS
Makine Eğitimi Otomotiv Anabilim Dalını
Eylül-2010 KONYA Her Hakkı Saklıdır
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
Mustafa KARAGÖZ Tarih:23.09.2010
iv
Makine Eğitimi Anabilim Dalı
DanıĢman: Doç. Dr. Hayrettin DÜZCÜKOĞLU Yıl, 2010, 73 Sayfa
Jüri
Doç. Dr. Hayrettin DÜZCÜKOĞLU Doç. Dr. Mesut UYANER Yrd. Doç. Dr. Ali KAHRAMAN
Yapılan bu çalıĢmada, operatörün kabin içersinden görüĢ alanını arttırmak amacı ile belirli açılarda ve yönlerde hareket edebilen robot operatör kabini tasarlanmıĢtır. Bu sayede operatör yükleme ve boĢaltmalarda görüĢ alanını arttırmak için kabin içersinden kumanda ederek belirli mesafe ve açılarda görüĢ alanı sağlayacaktır. Bu proje öncelikle bilgisayar ortamında 3D tasarımı yapılmıĢtır. Malzeme seçimi, yük, sınır Ģartları belirlenerek robot kabinin hareketlerinin ve kabinin ağırlığından dolayı oluĢan gerilmelerin statik, dinamik, rijit dinamik ve düĢme analizleri ANSYS paket programı yardımı ile çözüm yapılmıĢtır.
v
ABSTRACT MS
DESIGN OF MOBILE CRANES ROBOT CABINET AND ANALYSIS
Mustafa KARAGÖZ
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF MASTER OF SCIENCE DEPARTMENT OF MACHINE EDUCATION
Advisor: Assoc.Prof.Dr.Hayrettin DÜZCÜKOĞLU Year, 2010, 73 pages
Jury
Assoc.Prof.Dr. Hayrettin DÜZCÜKOĞLU Assoc.Prof.Dr. Mesut UYANER Assit. Prof. Dr Ali KAHRAMAN
In this study, robot operator cab increase operator’s view area, by moving in defined directions, intervals, angles. Therefore, operator increase view area by remote controlling in the cab, in defined directions,intervals, angles. Engineering analysis, such as; material selection, load minimum, maximum values, robot cab movements, cab weight which cause robot arms is performed in CAD-Computer Aided Design and CAE-Computer Aided Engineering Programs
vi
esirgemeyen MPG ACAR AR-GE çalıĢanlarına teĢekkürü bir borç bilirim. ANSYS yazılımları için S.Ü.B.A.P koordinatörlüğü tarafından 10201035 nolu proje ile destek alınmıĢtır.
Mustafa KARAGÖZ KONYA-2010
vii ĠÇĠNDEKĠLER ÖZET ... iv ABSTRACT ... v ÖNSÖZ ... vi ĠÇĠNDEKĠLER ... vii ġEKĠL LĠSTESĠ ... ix ÇĠZELGE LĠSTESĠ ... xi
SĠMGELER VE KISALTMALAR ... xii
1 GĠRĠġ ... 1 1.1 Vinç ... 1 1.2 Vinç ÇeĢitleri ... 1 1.3 Mobil Vinçler ... 2 1.4 Operatör Kabinleri ... 2 1.4.1 Sabit kabin ... 3
1.4.2 Yarı hareketli kabin ... 4
1.4.3 Hareketli kabin ... 5
2 KAYNAK ARAġTIRMASI ... 6
2.1 ÇalıĢmanın Amacı ... 8
3 KIRILMA VE AKMA TEORĠLERĠ ... 9
3.1 Gerilme teorileri ... 9
3.1.1 Maksimum gerilme ( Rankine ) teorisi ... 9
3.1.2 Maksimum kayma gerilmesi teorisi (Tresca Kriteri) ... 10
3.1.3 Ġç sürtünme teorisi (Coulomb Kriteri) ... 11
3.1.4 Ġç Sürtünme teorisi (Mohr Kriteri) ... 12
3.2 ġekil DeğiĢimi Teorileri ... 12
3.2.1 Maksimum birim uzama (Saint- Venant) teorisi ... 12
3.2.2 Maksimum Çarpılma Açısı Teorisi... 13
3.3 Enerji Teorileri ... 14
3.3.1 Toplam Ģekil değiĢimi enerjisi teorisi (Beltrami Enerji Teorisi) ... 14
3.3.2 Çarpılma enerjisi teorisi veya biçim değiĢtirme enerjisi teorisi (Von Mises) 14 4 KONSTRÜKSĠYONDA GÜVENĠRLĠK ... 16
4.1 Konstrüksiyon’da Emniyet Gerilmesi ve Emniyet Katsayısı ... 16
viii
6.1 DesignModeler ... 31
6.1.1 Ön hazırlık ... 32
6.2 Statik Analiz ... 34
6.2.1 Statik analizin ANSYS Workbench’ de modellenmesi ... 35
6.3 Rijit Dinamik Analiz ... 41
6.3.1 Rijit dinamik analizin Ansys Workbench’te modellenmesi ... 41
6.3.1.1 Malzemeyi rijit yapma ... 42
6.3.1.4 Deplasmanın verilmesi (pistona kuvvet uygulanması) ... 45
6.4 Flexible Dinamik Analiz ... 47
6.4.1 Flexible dinamik analizin ANSYS Workbench’de modellenmesi ... 48
6.5 DüĢme Analizi ... 50
6.5.1 DüĢme analizinin ANSYS Workbench’de modellenmesi ... 50
7 ARAġTIRMA BULGULARI ... 52
7.1 Rijit Dinamik Analiz ... 52
7.2 Statik Analiz ... 55
7.2.1 Hareketli kabinin statik analizi ... 55
7.3 Filexible Dinamik Analiz ... 61
7.4 DüĢme Analizi ... 66
7.4.1.Çarpmanın neden olduğu yer değiĢtirme ... 66
8 SONUÇLAR ... 70
KAYNAKLAR ... 71
ix
ġEKĠL LĠSTESĠ
ġekil 1.1 Mobil vinç ... 2
ġekil 1.2 Operatör kabinleri ... 3
ġekil 1.3 Sabit operatör kabini ... 4
ġekil 1.4 Yarı hareketli operatör kabini ... 5
ġekil 1.5 Hareketli kabin ... 5
ġekil 3.1Malzemenin akma veya kırılma değerine ulaĢması ... 10
ġekil 3.2 Düzlem gerilme için Tresca akma kriterinin gösterimi (Anonim 2010) ... 11
ġekil 3.3 Coulomb kriterinin 3 boyutlu gösterimi ... 12
ġekil 3.4 Mohr kriterinin iki eksende grafiği ... 12
ġekil 3.5 Saint-Venant teorisinin iki eksenli diyagramı ... 13
ġekil 4.10 Von mises teorisi için oluĢturulan Ģekil ... 15
ġekil 5.1 Hareketli kabinin ön görülen boyutları ... 19
ġekil 5.2 Hareketli kabinin yukarı yükselme hareketi ... 19
ġekil 5.3 Operatörün binebileceği seviyeye inmiĢ hareketli kabin ... 20
ġekil 5.4 Operatörün binebileceği seviyeye inmiĢ hareketli kabin ... 20
ġekil 5.5 Hareketli kabinin farklı Ģekillerde konumlanması ... 21
ġekil 5.6 Hareketli kolların katlanmıĢ hali ... 21
ġekil 5.7 Kabinin yatayda hareketi ... 22
ġekil 5.8 Hareketli kabinin 180 derece dönüĢü ... 22
ġekil 5.9 Döndürme diĢlisinin sisteme montajı (A) Ġzomertik görünüm, (B) Üstten görünüĢ, (C) kesit ... 23
ġekil 5.10 Pro engineer’ de oluĢturulan hareketli kabin ... 26
ġekil 5.11 Sonlu elemanlara ayrılmıĢ hareketli kabin ... 27
ġekil 5.12 Analizi yapılacak olan hareketli kabine malzeme atama ... 28
ġekil 5.13 Yeni malzeme oluĢturma ... 28
ġekil 5.14 Temas noktası tanımlama ve temas tipleri ... 29
ġekil 5.15 Yük ve sınır koĢullarının verilmesi ... 29
ġekil 5.16 Programa çözüm yaptırma ... 30
ġekil 5.17 Çözüm yaptırılmıĢ hareketli kabin görülmektedir. ... 30
ġekil 6.1 Design modeler’da basitleĢtirme seçeneklerinin menü görünümü ... 32
ġekil 6.2 Face delete özelliğinin uygulanması (Anonim 2010)... 33
ġekil 6.3 Boolean komutunun uygulanması ... 33
ġekil 6.4 Ġmprint face özelliğinin uygulanması ... 34
ġekil 6.5 Design modelere 3D parça çağırma ... 35
ġekil 6.6 Desing modeler’de düzenlenen 3D katı modeli simülasyon kısmına aktarma 36 ġekil 6.7 Yeni kontak tanımlama ... 37
ġekil 6.8 Kontak tipleri ve temas yüzey seçim kutucukları ... 37
ġekil 6.9 Kontak tanımlanmıĢ geometri ... 38
ġekil 6.10 Mesh edilmiĢ hareketli kabin montajı ... 39
ġekil 6.11 Ankastre mesnet uygulanmıĢ yüzeyler ... 39
ġekil 6.12 Yük ve yer çekimi ivmesinin uygulanması ... 40
ġekil 6.13 Çözüme hazırlanmıĢ model ... 41
ġekil 6.14 Malzemeyi rijit yapma ... 42
ġekil 6.15 Yeni joint oluĢturma adımları ... 43
ġekil 6.16 Body’nin sabitlenmesi ... 43
ġekil 6.17 Refrans ve mobili seçilmiĢ montaj ... 44
ġekil 6.18 Joint çeĢitleri ... 45
x
ġekil 7.6 Piston ve pim gerilme analizi ... 56
ġekil 7.7 Piston ve pimlere gelen gerilme dağılımı ... 56
ġekil 7.8 Kabinin statik analiz sonucu ... 57
ġekil 7.9 Kabin üzerindeki gerilme dağılımları ... 57
ġekil 7.10 Pim yataklarının büyütülmüĢ resmi ... 58
ġekil 7.11 Hareketli kolların statik analiz sonucu 2 ... 58
ġekil 7.12 Piston ve pim gerilme analizi 2 ... 59
ġekil 7.13 Kabin üzerindeki değiĢiklikler ... 60
ġekil 7.14 Kabinin statik analiz sonucu 2 ... 60
ġekil 7.15 Deplasman uygulanan A, B, C pistonları ... 61
ġekil 7.16 Flexible analiz çözüm 1 ... 62
ġekil 7.17 Sistemin hareketi esnasında sisteme gelen gerilme değiĢimleri ... 62
ġekil 7.18 Flexible analizde gerilme değiĢimi ve sistem hareketi ... 63
ġekil 7.19 Flexible analiz çözüm 2 ... 64
ġekil 7.20 Sistemin hareketi esnasında sisteme gelen gerilme değiĢimleri 2 ... 64
ġekil 7.21 Flexible analizde gerilme değiĢimi ve sistem hareketi ... 65
ġekil 7.22 KiriĢin Dinamik Yer DeğiĢtirmesi ... 66
ġekil 7.23 Toplam deformasyon ... 69
xi
ÇĠZELGE LĠSTESĠ
Çizelge 5.1 Kabin malzemesinin fiziksel özellikleri………...23 Çizelge 5.2 Kabin hareketini sağlayan kolların fiziksel özellikleri……….24 Çizelge 5.3 Pim malzemesinin fiziksel özellikleri………..24
xii
T Sıcaklık ( C)
σ
maks. Maksimum von Mises gerilmesi (MPa) ε
g Gerçek Ģekil değiĢtirme (mm) S Emniyet katsayısı
τ
yz, τxz, τxy Sırasıyla yz, xz, xy düzlemlerindeki kayma gerilmeleri (MPa) ε
x, εy, εz Sırasıyla x,y,z eksenlerindeki Ģekil değiĢtirmeler (mm)
GB Gigabyte
I Kesit atalet momenti ( )
1 GĠRĠġ
Hidrolik mobil vinç sektörü ülkemizde hızlı bir geliĢim göstermektedir. Özellikle inĢaat sektörü, kaldırma, kurtarma ve montaj iĢlerinde bu vinçlere olan gereksinim giderek artmaktadır. Vinç kabini operatörün kullanması gereken tüm kumanda sistemini içinde barındıran ve operatörün güvenliğini ve konforunu sağlayan bir ünitedir. Operatör tarafından bu kabin içersinden yük kaldırma ve boĢaltma iĢlemlerini gözlem yaparak veya yardımcı personel kullanarak gerçekleĢtirmektedirler. Ancak bazı durumlarda vinç operatörü kabin içersinden yükü veya boĢaltma yerini tam olarak görememekte ya da yardımcı operatör tecrübesizliği sebebiyle yük veya çevre güvenliğinde istenmeyen olaylar meydana gelmektedir.
Yapılan bu çalıĢmada operatörün kabin içersinden görüĢ alanını arttırmak amacı ile belirli açılarda ve yönlerde hareket edebilen robot operatör kabini tasarlanmıĢtır. Bu sayede operatör yükleme ve boĢaltmalarda görüĢ alanını arttırmak için kabin içersinden kumanda ederek belirli mesafe ve açılarda görüĢ alanı sağlayacaktır. Bu proje öncelikle bilgisayar ortamında 3D tasarımı yapılmıĢtır. Malzeme seçimi, yük, sınır Ģartları belirlenerek robot kabinin hareketlerinin ve kabinin ağırlığından dolayı oluĢan gerilmelerin statik, dinamik, rijit dinamik ve düĢme analizleri ANSYS paket programı yardımı ile çözüm yapılmıĢtır.
1.1 Vinç
Herhangi bir kütle veya malzeme kaldırma, farklı bir yöne dönerek veya hareket ederek aktarma, yerlerini değiĢtirme, yükleme, boĢaltma iĢlerinde kullanılan makinelere vinç denilmektedir.
1.2 Vinç ÇeĢitleri
Kullanım yerlerine göre vinçler aĢağıdaki Ģekilde sınıflandırılabilir Kaba arazi vinçleri
Paletli vinç Güverte vinci Liman vinci Kollu vinç
1.3 Mobil Vinçler
Hareketsiz olan vinçlerin farklı yerlere kolayca taĢıyabilme fikrinden doğan mobil vinçler, kamyonla vincin birleĢimidir. Özellikle inĢaat sektörü, kaldırma, kurtarma ve montaj iĢlerinde bu vinçler yaygın olarak kullanılmaktadır. ġekil 1.1’ de mobil vinç resmi gözükmektedir.
ġekil 1.1 Mobil vinç
1.4 Operatör Kabinleri
Vinç kabini operatörün kullanması gereken tüm kumanda sistemini içinde barındıran ve operatörün güvenliğini ve konforunu sağlayan bir ünitedir. Operatör tarafından bu kabin içerisinden yük kaldırma ve boĢaltma iĢlemlerini gözlem yaparak
veya yardımcı personel kullanarak gerçekleĢtirmektedirler. ġekil 1.2’de vinç operatör kabini görülmektedir.
ġekil 1.2 Operatör kabinleri
1.4.1 Sabit kabin
Mobil vinç kabinlerinde ve iĢ makineleri operatör kabinlerinde karĢılaĢılan en büyük problemlerden bir tanesi, kaldırılan yükün her açıdan görülememesidir. Yük taĢırken yükün görülememesi, sadece yük için insanlar içinde büyük bir risk ortaya çıkarmaktadır. Sabit kabin; kabinin Ģaseye hareket etmeyecek Ģekilde bağlanması ile oluĢan sistemdir. Sabit kabinde ek bir sistem kullanılmaz. Maliyet bakımından diğer kabinlerden çok faklı değildir. Göz seviyesinin üstünde çalıĢmalarda operatör kafasını yukarı doğru kaldırmakta, uzun süreli çalıĢmalar boyun tutulmalarına neden olmaktadır. Ayrıca operatör yükü tam olarak göremez. Kullanım kolaylığı sağlamak, operatör görüĢünü arttırmak için farklı tasarımlar yapılmıĢtır. ġekil 1.3’te sabit kabin resmi görünmektedir.
ġekil 1.3 Sabit operatör kabini
1.4.2 Yarı hareketli kabin
Operatörün daha kolay çalıĢması için tasarlanmıĢ operatörün görüĢ alanını arttıran yarı hareketli kabin Ģekil 1.4’te gözükmektedir.
ġekil 1.4 Yarı hareketli operatör kabini
1.4.3 Hareketli kabin
Operatörün istediği gibi konumlandırabileceği tam hareketli kabin Ģekil 1.5’ de görülmektedir. Hareketli kabin sayesinde operatör konumunu istediği gibi ayarlayarak maksimum görüĢ açısını yakalar. Uygun pozisyonu kendisi ayarlayarak en rahat çalıĢma ortamını ayarlayabilir.
trafik yoğunluğunun gün geçtikçe artmasına yol açmakta, bunun sonucu olarak meydana gelen trafik kazaları, kaçınılmaz olmaktadır. Kaza etkilerini azaltmak adına ele alınan bu çalıĢmada, sürücülerin taĢıtlarına sonradan yaptırmıĢ oldukları ek tamponların dayanıklılığı 3-D modeli oluĢturulup, sonlu elemanlar yöntemiyle incelenmiĢ. Tamponun darbeye karĢı dayanıklılığını artırmak için farklı geometriler denenmiĢlerdir. Yapılan iyileĢtirmeler sonucunda ağırlıkça daha hafif aynı zamanda darbeye karĢı daha dayanıklı tampon geometrileri elde edilmiĢlerdir.
Wu ve ark. (2000) tarafından yapılan çalıĢmada, hareket yükleri altındaki yapıların dinamik davranıĢları analitik yöntemlerle ve sonlu elemanlar metoduyla incelenmiĢtir. Önceki çalıĢmalarda atalet etkileri göz önüne alınmaksızın hareketli kütleler hareket yükleri olarak kabul edilmiĢtir. Bu genellikle doğru bir yöntem değildir, burada atalet etkileri analiz sonuçlarını etkilemektedir. Öncelikle tekil kütlenin basit mafsallı kiriĢ üzerindeki hareketi modellenmiĢ ve metodoloji geliĢtirilmiĢtir. GeliĢtirilen metodoloji gezer köprülü portal kren sistemi üzerine uygulanmıĢ ve deneysel olarak sistemin dinamik davranıĢları incelenmiĢtir.
Toker ve Ünay’ın (2004) ‘’Kemerli TaĢ Köprülerin Matematiksel Modellenmesi Ve Sonlu Elemanlar Yöntemiyle Analizi’’ adlı çalıĢmasında genel kemerli taĢ köprü tipolojisini yansıtacak Ģekilde geliĢtirilen kemer prototipi üzerinde, çeĢitli yük etkileri altında matematiksel modelleme teknikleri denenmiĢtir.
Fetvacı ve Ġmrak (2005) yapmıĢ olduğu düz diĢlilerde kavrama çevriminde gerilmelerin değiĢiminin sonlu eleman metodu ile incelenmesi adlı çalıĢmada ANSYS yazılımının parametrik programlama lisanı kullanılarak düz diĢli çark sonlu eleman modeli elde edilmiĢtir. Elde edilen modelden hareketle yeni bir diĢli çark sonlu eleman modeli geliĢtirmiĢlerdir. GeliĢtirilen model düz diĢlilerde kavrama çevriminde gerilme
değiĢimi incelenmiĢtir. ÇeĢitli haller için analiz neticeleri grafikler ile takdim etmiĢlerdir.
Uçar ve ark. (2007) yapmıĢ olduğu çalıĢmada, hidrolik boom tipi örnek bir krende statik yükleme sonucu oluĢan gerilmelerin sonlu elemanlar yöntemi ile incelenmesi adında bir çalıĢma yapmıĢ ve çalıĢmasında örnek olarak seçilen hidrolik boom tipi bir krendeki taĢıyıcı kol (boom) 3 boyutlu olarak modellenmiĢtir. TaĢıyıcı kol üzerinde statik yükleme durumu altındaki gerilme dağılımları sonlu elemanlar metodu kullanılan bir paket yazılım ile incelenmiĢtir. Analiz sonrası elde edilen sonuçlar yorumlanmıĢ, kren konstrüksiyonunun hasara uğramadan çalıĢtığı gerçekleĢtirilen simülasyon ile gösterilmiĢtir. Kren konstrüksiyon elemanları için malzeme akma mukavemeti baz alınarak analiz sonuçlarına göre çalıĢma güvenlik katsayıları çıkartmıĢlardır.
Dağ (2007), Hidromek Ltd. Ģirketi tarafından imal edilmekte olan HMK220LC-2 model 22 ton kapasiteli bir ekskavatör için iĢ makinelerinde kırılma ve yorulma problemlerinin sonlu elemanlar yöntemiyle incelenmesi adında bir çalıĢma yapmıĢtır. ÇalıĢmada 22 ton kapasiteli bir ekskavatör bomunun parametrik üç boyutlu sonlu elemanlar modeli geliĢtirilmiĢtir. Bu model kullanılarak ekskavatör bomu üzerinde istenilen noktalarda eĢdeğer von Mises gerilme dağılımı hesaplanmıĢ. Ekskavatör kepçesinin sabit büyüklükte çevrimsel yüke maruz kaldığı varsayılarak değiĢik noktalar için yorulma hesaplamaları yapılmıĢtır. Dayanıklılık sınırı ve Goodman yaklaĢımının kullanıldığı yorulma hesaplarında farklı tasarım geometrileri için yorulma ömründe meydana gelen farklılıkları incelemiĢtir. Elde edilen sonuçlar farklı dayanıklılık sınırı kullanılarak yapılan hesapların ömür hesaplamalarında birbirine yakın yüzde artıĢlar verdiğini ortaya koymaktadır.
Eruslu (2007) çalıĢmasında ince cidarlı basınçlı tüplerde ASTM standartlarında belirtilen iki farklı çelik için basınç etkisi altında gerilme analizi yapılmıĢtır. Ġki boyutlu ve üç boyutlu sonlu elemanlar modelleri ANSYS 9.0 yardımıyla oluĢturmuĢ, üç boyutlu model tasarım yönünden iki farklı Ģekilde incelemiĢtir. Maksimum gerilme kriteri yardımıyla patlama basınçlarını bulunuĢ, tüp üzerindeki hasarlı bölgeler belirlemiĢtir. Hasar sonuçları von Mises kriteri sonuçları ve standartlardan elde edilen analitik sonuçları ile karĢılaĢtırmıĢtır.
yüksek gerilme değerlerinin düĢürülmesi için gerekli değiĢiklikleri yaparak optimum tasarımın elde edilmesi amaçlanmıĢtır. Diğer çalıĢmalardan farklı olarak bu çalıĢmada hareketli kabin sistemi statik, flexible dinamik, rijit dinamik ve düĢme analizlerinin tümü ele alınarak sistemde düzenlemeye gidilmiĢtir.
3 KIRILMA VE AKMA TEORĠLERĠ
ġu ana kadar hiçbir teori tam olarak malzemenin akmasına ve kırılmasına cevap vermemektedir. Bu teoriler kurulurken malzemeler gevrek ya da sünek diye gruplandırılır. Fakat gerçekte malzeme karakteristikleri sıcaklıkla ve gerilme halleri ile yakından ilgilidir. Kabul görmüĢ ve günümüzde kullanılan bu teorileri 3 sınıfta toplamak mümkündür (Sayman, O. ve Ark., 1997). Bunlar:
I. Gerilme Teorileri
a. Maksimum gerilme teorisi
b. Maksimum kayma gerilmesi teorisi (Tresca) c. Ġç sürtünme teorisi (Coulomb kriteri)
d. Ġç sürtünme teorisi (Mohr kriteri)
II. ġekil DeğiĢimi Teorileri
a. Maksimum birim uzama (Saint- Venant) teorisi b. Maksimum çarpılma açısı teorisi
III. Enerji Teorileri
a. Toplam Ģekil değiĢimi enerjisi teorisi (Beltrami Enerji Teorisi) b. Çarpılma enerjisi teorisi (von Mises kriteri)
3.1 Gerilme teorileri
3.1.1 Maksimum gerilme ( Rankine ) teorisi
Bu teoriye göre malzemenin akması veya kırılması en büyük asal gerilmenin tek eksenli haldeki akma ya da kırılması değerine ulaĢmasıyla olur. Malzemenin akma ya da kırılma değeri olsun ; > > = malzeme kırılır. ġekil 3.1
ġekil 3.1Malzemenin akma veya kırılma değerine ulaĢması
Bu teori bu sahada kullanılan ilk teori olması ile birlikte gevrek malzemeler için kısmen iyi sonuçlar vermektedir. Teoride her zaman en büyük gerilme değeri alındığından dolayı teorinin eksiklikleri bulunmaktadır. Teoriye göre kopmanın meydana geldiği yüzey teorikte düzken gerçekte girintili çıkıntılıdır. Ġlaveten bu teori hidrostatik basınca maruz bir malzemenin akmasını ya da kırılmasını izah edemez (Sayman, O. ve Ark., 1997).
3.1.2 Maksimum kayma gerilmesi teorisi (Tresca Kriteri)
Tresca’ ya göre; genel çok boyutlu gerilme durumlarında akmanın meydana gelebilmesi için maksimum kayma gerilmesinin kritik değere ulaĢması gerekmektedir.
Bu teori sünek malzemeler için uygun sonuçlar vermektedir. Bu nedenle mühendislikte sıkça kullanılır.
Malzeme üstüne gelen gerilmeler ; > > ve malzemenin maksimum kayma gerilmesi olsun sistemin maksimum kayma gerilmesi:
(3.1)
ġekil 3.2 Düzlem gerilme için Tresca akma kriterinin gösterimi (Anonim 2010) 3.1.3 Ġç sürtünme teorisi (Coulomb Kriteri)
Bu teoriye göre malzemenin kırılması, maksimum kayma gerilmesi ve malzemenin iç sürtünme kuvvetine bağlıdır.
Basınca maruz kalan gevrek malzemelerin tam kırılma noktasına yaklaĢıldığında çubuğun orta kesitlerinde kırılmalar ve kopmalar meydana gelmektedir, teori bu olayı açıklayabilmektedir (Çemberli taĢ ve Konya’daki Alâeddin cami sütunları bu olaya örnek gösterilebilir.). Ayrıca bu teori hidrostatik basınç olayına da açıklık getirebilmektedir. Bu teori gevrek malzemeler için oldukça kullanıĢlıdır. Teorinin tek eksiği ortanca gerilme olan : ‘yi hesaba katmamasıdır (Sayman, O. ve Ark., 1997).
Coulomb kriterine göre ;
-
=
1 dir. (3.2)ġekil 3.3 Coulomb kriterinin 3 boyutlu gösterimi 3.1.4 Ġç Sürtünme teorisi (Mohr Kriteri)
Bu kritere göre malzemenin kırılması maksimum kayma gerilmesine bağlı olmanın yanı sıra iç sürtünme gerilmelerinin de bir fonksiyonudur.
Gevrek malzemeler için mükemmel bir kriterdir. Tek eksiği ortanca gerilmenin hesaba katılmamasıdır. Fakat son zamanlarda ortanca gerilmeyi hesaba katan bir zarf bandı ile bu eksiklik giderilmektedir (Sayman, O. ve Ark., 1997). Bu kriterin iki eksenli haldeki grafiği ġekil 3.4’te gösterilmiĢtir.
ġekil 3.4 Mohr kriterinin iki eksende grafiği 3.2 ġekil DeğiĢimi Teorileri
3.2.1 Maksimum birim uzama (Saint- Venant) teorisi
Bu teoriye göre bir malzemenin akması, birleĢik gerilme durumunda maksimum birim uzamanın tek eksenli haldeki birim uzamaya ulaĢması ile olur.
Tek eksenli halde : (3.3)
Genel halde : (3.4)
Ġki eksenli halde ise : (3.5)
(3.6)
Ġki eksenli halde diyagramı ġekil 3.5’te gösterilmiĢtir.
ġekil 3.5 Saint-Venant teorisinin iki eksenli diyagramı
Bu teori deneysel sonuçlarla tam uyuĢmaz, hidrostatik basınç olayına açıklık getiremez ve ayrıca iki eksenli durumda gerilmeler birbirine eĢit olunca malzeme mukavemeti artacağı Ģeklinde hatalı bir sonuca götürmektedir. Fakat kalın cidarlı top namlularının imalatında iyi sonuçlar verebilmektedir (Sayman, O. ve Ark., 1997).
3.2.2 Maksimum Çarpılma Açısı Teorisi
BirleĢik gerilme halindeki maksimum çarpılma açısı tek eksenli haldeki çarpılma açısına ulaĢırsa kırılma veya akma baĢlar bu teori hidrostatik basınç olayına bir açıklama getirememektedir.
camın kırılması olayı bu teori ile ifade edilebilir (Sayman, O. ve Ark., 1997).
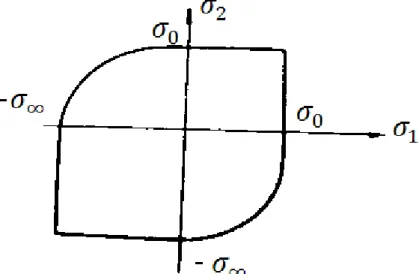
3.3.2 Çarpılma enerjisi teorisi veya biçim değiĢtirme enerjisi teorisi (Von Mises)
Bu kriteri ilk kez 1865 yılında Maxwell formüle etmesine karĢın genellikle matematikçi Richard Von Mises (1913)’e atfedilmektedir. (Wikipedia 2010)
Sünek malzemeler için çok iyi sonuç verir. Bu kriter hidrostatik basınç olayına açıklık getirebilmektedir. Birim hacim genel çarpma enerjisi:
– – – (3.7)
Asal gerilme cinsinden;
– – – (3.8)
ġeklinde yazılır. Tek eksenli halde;
(3.9)
Genel halde;
– – – (3.10)
(3.11)
(3.12)
Bulunur ve diyagramı bir elipstir.
4.1 Konstrüksiyon’da Emniyet Gerilmesi ve Emniyet Katsayısı
Emniyet gerilmesi; bir elemanın geometrik yapısının bozulmadan üzerine gelen yüke gösterebildiği maksimum gerilme değerinin bir ölçüsüdür. Emniyet gerilmesinin bulunabilmesi için malzemenin mekanik özelliklerinin elde edildiği bazı deneysel çalıĢmaların yapılması veya önceden belirlenmiĢ verilerin kullanılması gerekir. Deneysel çalıĢmaların durumuna göre statik ve dinamik zorlamalar için farklı mukavemet veya sınır değerleri bulunur. Statik deneylerde kopma mukavemeti, akma mukavemeti gibi büyüklükle, dinamik deneylerle de sürekli mukavemet değerleri elde edilir ve değiĢik belirsizlikleri de içine alan bir katsayı ile küçültülerek emniyet gerilmesi elde edilir.
Emniyet gerilmeleri:
(4.1)
(4.2)
Burada S>1 olup emniyet katsayısı veya emniyet faktörü denilen bir belirsizliktir. Bu katsayının belirlenmesinde çalıĢma koĢulları, dıĢ kuvvet ve momentlerin tahmin edilmesinde karĢılaĢılabilecek belirsizlikler, teoride yapılan kabuller ve malzeme özellikleri önemli olmaktadır. Emniyet katsayısının belirlenmesinde herhangi bir kural yoktur. Bu katsayı çok yüksek olduğunda malzeme, iĢçilik ve maliyet artıĢına neden olacak, büyük kesitli parçalar elde edilecektir. Bu katsayı çok küçük seçildiğinde ise; konstrüksiyonda zayıf ve tehlikeli bölgelerin ortaya çıkmasına sebep olan kırılma veya kopma kısa sürede gerçekleĢir. Emniyet katsayısının belirlenmesinde Ģu faktörler dikkate alınmalıdır: (Koç, 2003)
Malzeme özelliklerindeki değiĢiklikler
Malzeme mukavemet özelliklerine büyüklük ve Ģeklin etkisi Yükleme tipi Ģekillendirme prosesi veya iĢleme etkisi AĢınma etkeni
Elemanın kullanacağı ortamda zaman ve çevre etkeni Ömür ve güvenirlilik için özel istekler
operatör kabin özellikleri aĢağıdaki gibi olması tavsiye edilmektedir. Bunlar;
Operatörü 2-2.5 m yüksekliğe kaldırabilme,
Boyutlarına göre uzanabileceği maksimum uzunluk, Operatörün binebileceği mesafeye kadar hareket kabiliyeti, Katlanabilme özelliği,
Operatörün isteği doğrultusunda konumlanma, Ġstenilen görüĢ açısını yakalayabilme,
Yukarıda ve aĢağıdaki çalıĢımlar için kabinin yatayda en az 30 derece aĢağı ve yukarı konumlanabilmesi,
dönebilme kabiliyeti,
Bir operatörün rahatça çalıĢabileceği güvenli bir kabin,
Hafif, kullanıĢlı, performansı yüksek ve estetik görünümlü bir dizayn,
5.1.1 Tasarımı düĢünülen örnek hareketli kabin tasarım kriterleri
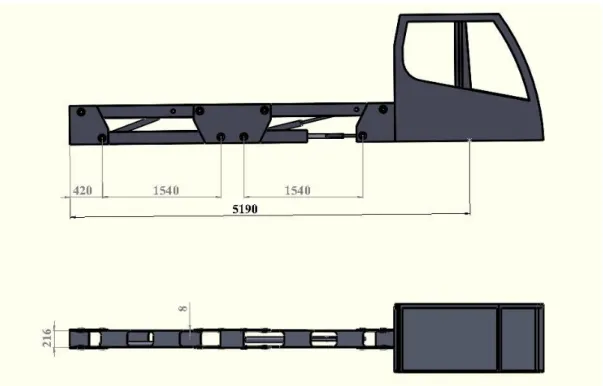
Kabin boyutları; mobil vinç üretiminde yaygın kullanılan taĢıtların yüksekliklerine göre boyutlandırılmıĢtır. Hareketli kollarda kullanılan sac kalınlığının yaklaĢık olarak 8 mm olması ön görülmüĢtür. Tasarımı yapılan makine parçasının ön boyutlandırılması tahmin yöntemiyle (analitik yöntemle) boyutlandırılarak çizilmiĢtir. Analiz sonucunda bu değerler değiĢiklikler yapılarak emniyet katsayısı 1,5< S <2 arasında alınmıĢtır. Emniyet gerilmesinin belirlenmesinde Ģu verilerde göz önünde bulundurulmuĢudur. T.C. karayollarında trafiğe çıkacak araç ya da iĢ makinelerinin dingil baĢına gelen yük sınırlanmıĢtır. Bu sebeple yapılacak olan kabinde hafiflik çok önemlidir. Kabin içi alan sınırlı olması itibari ile binebilecek kiĢi sayısı bellidir ayrıca kabine eklenen ağırlık sensörü sayesinde güvenli ağırlık üzerindeki yük hallerinde
hareket etmeyecektir. Bu faktörler doğrultusunda emniyet katsayısı 1,5 ile 2 arasında seçilmiĢtir. ġekil 5.1’de ön görülen kabin boyutları verilmiĢtir.
ġekil 5.1 Hareketli kabinin ön görülen boyutları
Tasarlanan hareketli kabinle operatör yaklaĢık 2.2 m yüksekliğe çıkabilecektir. ġekil 5.2’de kabinin 2.2 m yükseldiği görülmektedir.
ġekil 5.3 Operatörün binebileceği seviyeye inmiĢ hareketli kabin
Operatör hareketli kabini istediği gibi konumlandırabilir. ġekil 5.5’te hareketli kabinin farklı konumlanmaları görünmektedir.
ġekil 5.5 Hareketli kabinin farklı Ģekillerde konumlanması
Kabin hareketli kolları tamamen katlanarak daha az yer kaplaması Ģekil 5.6’da planlanmıĢtır.
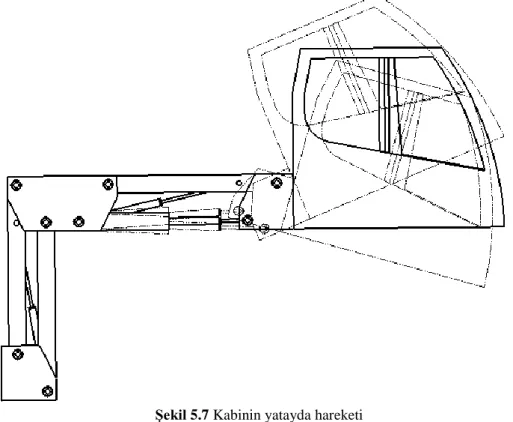
ġekil 5.7 Kabinin yatayda hareketi
Hareketli kabin diĢli çark sistemi sayesinde 180 derece dönüĢ kapasitesine sahip olacaktır. ġekil 5.8
Döndürme mekanizmasının sistemdeki yeri ve montaj resmi Ģekil 5.9’ da gösterilmiĢtir. (A) Ġzomerik görünüm, (B) Üstten bakıĢ, (C) kesit
ġekil 5.9 Döndürme diĢlisinin sisteme montajı (A) Ġzomertik görünüm, (B) Üstten görünüĢ, (C) kesit
5.1.3 Hareketli kabinde kullanılan malzemeler
Hareketli kabin sistemi üzerinde kullanılan malzemeler, sistem üzerine gelen gerilme büyüklüklerine göre farklı atanmıĢtır. Montaj üç kısma ayrılmıĢtır. Bu üç kısma ayrı ayrı malzeme atanmıĢtır. Bunlar sırayla; sistemin en kritik olduğu düĢünülen pimlere alaĢım çeliği atanmıĢtır. Üzerinde yatakları bulunduran kabini hareket ettiren kollara AISI 1020 çeliği kullanılmıĢtır. Son olarak kabin malzemesi de galvanizli çelik atanmıĢtır. Malzeme özellikleri aĢağıdaki çizelgelerde verilmiĢtir.
Çizelge 5.1 Kabin malzemesinin fiziksel özellikleri Galvanizli Çelik Elastisite modülü 200000 N/ Poisson oranı 0.29 Yoğunluk 7870 kg/ Gerilme direnci 356.9 N/ Akma gerilmesi 203.94 N/ .
Çizelge 5.3 Pim malzemesinin fiziksel özellikleri AlaĢım Çeliği AISI 5140
Elastisite modülü 210000 N/
Poisson oranı 0.28
Yoğunluk 7700 kg/
Gerilme direnci 723.83 N/
5.2 ANSYS
5.2.1 ANSYS programı
ANSYS yazılımı mühendislerin mukavemet, titreĢim, akıĢkanlar mekaniği ve ısı transferi ile elektromanyetik alanlarında fiziğin tüm disiplinlerinin birbiri ile olan interaksiyonunu simule etmekte kullanılabilen genel amaçlı bir sonlu elemanlar yazılımıdır.
Bu sayede gerçekleĢtirilen testlerin ya da çalıĢma Ģartlarının simule edilmesine olanak sağlayan ANSYS, ürünlerin henüz prototipleri üretilmeden sanal ortamda test edilmelerine olanak sağlar. Ayrıca sanal ortamdaki 3 boyutlu simülasyonlar neticesinde yapıların zayıf noktalarının tespiti ve iyileĢtirilmesi ile ömür hesaplarının gerçekleĢtirilmesi ve muhtemel problemlerin öngörülmesi mümkün olmaktadır.
ANSYS yazılımı hem dıĢarıdan CAD datalarını alabilmekte hem de içindeki preprocessing imkanları ile geometri oluĢturulmasına izin vermektedir. Gene aynı preprocessr içinde hesaplama için gerekli olan sonlu elemanlar modeli yani mesh de oluĢturulmaktadır. Yüklerin tanımlanmasından sonra ve gerçekleĢtirilen analiz neticesinde sonuçlar sayısal ve grafiksel olarak elde edilebilir.
ANSYS yazılımı ile özellikle temas algoritmalarının çeĢitliliği, zamana bağımlı yükleme özellikleri ve nonlinear malzeme modelleri sayesinde yüksek mühendislik seviyedeki analizleri hızlı, güvenilir ve pratik bir Ģekilde gerçekleĢtirilebilmektedir (Anonim 2010).
5.2.2 ANSYS ile yapılabilecekler
ANSYS paket programı ile aĢağıdaki iĢlemleri yapmak mümkündür (Anonim 2010).
Mekanik tasarım
Mukavemet ve yorulma hesapları Hesaplamalı akıĢkanlar dinamiği Hareket simülasyonları
Çarpma, devrilme ve patlama simülasyonları TitreĢim hesapları modal analizleri
Çözümlenecek problem geometrisi CAD programında ya da sonlu elemanlar paket programlarında modellenebilir. OluĢturulan model sonlu elemanlar paket programının desteklemediği bir CAD programı ise IGES, DXF, SAT gibi dönüĢtürücü formatlar ile transfer edilebilir. ġekil 5.10’da Pro Engineer Wilfire 4.0 kullanılarak oluĢturulmuĢ 3 boyutlu robot kabin görülmektedir. Hareketli kabin modellenmesinde 3D çizim programı olarak Pro Engineer ve Solidworks paket programları kullanılmıĢtır.
ġekil 5.10 Pro engineer’ de oluĢturulan hareketli kabin
5.2.3.2 Sonlu eleman seçimi
Sonlu elemanlar metodunu uygulayacak kiĢinin sonlu elemanlarda eleman seçimi hakkında yeterince bilgisi olması gerekmektedir. Çünkü cismin geometrisi, analizin tipi (mukavemet, ısı transferi, manyetik analiz gibi) ve sınır Ģartları eleman seçimini etkiler. Sonlu eleman paket programının kütüphanesinden ya da kullanıcının model geometrisine ve problem tipine uyumlu bir eleman tanımlaması ile eleman seçimi yapılabilir. Örneğin ANSYS paket programında farklı analiz tipleri için yaklaĢık olarak 252 adet eleman bulunmaktadır (Benli 2003).
5.2.3.3 Sonlu eleman modelinin oluĢturulması
Karmaşık olan model mesh edilerek modelden daha küçük parçacıklara ayrılır ve sonlu elemanlar modeli oluşturulur. Model ne kadar çok elemanlara bölünürse, elde edilecek sonuçlar da gerçeğe o kadar yakın değerlerde olabilmektedir. Ancak fazla eleman sayısı demek modeldeki bilinmeyen sayısının da artması demektir ki bu da bilgisayarlarda daha fazla hesaplama yapılması anlamına gelir, sonucun elde edilme süresi uzar ve daha büyük belleklere gereksinim duyulur. Genellikle sonlu elemanlar paket programları otomatik olarak sonlu elemanlar modelini oluştursalar da, bazı hassas bölgeler üzerinde düzeltmeler yapmak gerekebilmektedir (Benli, 2003). Sonlu modeli oluşturulmuş hareketli kabin şekil 5.11’de görülmektedir.
ġekil 5.11 Sonlu elemanlara ayrılmıĢ hareketli kabin
5.2.3.4 Malzemenin belirlenmesi
Malzeme özellikleri; Elastisite modülü, poisson oranı, yoğunluk, ısı transfer katsayısı gibi seçilen elemana bağlı olarak değiĢen değiĢkenler ve kesit alanı, atalet momenti gibi değerler sabit olarak ya da bir değiĢkene bağımlı olarak kullanıcı tarafından belirlenmelidir. Materyal seçiminden yeni materyal seçilerek gerekli değerler girilebilir (ġekil 5.12). New material sekmesi tıklandığında açılan pencerede (ġekil 5.13) istenilen değer atanıp yeni malzeme oluĢturulabilinir.
ġekil 5.12 Analizi yapılacak olan hareketli kabine malzeme atama
ġekil 5.13 Yeni malzeme oluĢturma
5.2.3.5 Temas noktalarının tanımlanması
Birbirine temas halinde olan yüzeylere kontak tanımlanmalıdır. Eğer montajda bir parçaya kontak tanımlanmamıĢsa parça yer çekiminin etkisiyle aĢağıya doğru hareket eder. DeğiĢik kontak tanımlamalarını program otomatik olarak vermektedir. Bunlar; Ģekil 5.14’te görülen sürtünmeli, kaymalı, birleĢik, sürtünmesiz kontaklardır.
ġekil 5.14 Temas noktası tanımlama ve temas tipleri
5.2.3.6 Yük ve sınır koĢullarının belirlenmesi
Model üzerine gerçekte nereden yük veya moment geliyorsa o noktalara yük veya moment uygulanır. Sabit olan yerler belirlenerek kullanıcı tarafından girilir. ġekil:5.15’te yük ve sınır koĢulları belirlenen hareketli kabin görülmektedir.
A: Uygulanan yük B, C: Mesnet noktaları
D: Standart yer çekimi kuvveti
ġekil 5.16 Programa çözüm yaptırma
5.2.3.8 Sonuçların değerlendirilmesi
Elde edilen analiz sonuçları liste, grafiksel olarak ya da animasyon Ģeklinde ekranda görüntülenmesi iĢlemidir. ġekil 5.17’de analizi tamamlanmıĢ hareketli kabin görüntüsü yer almaktadır (Benli, 2003).
6 ANALĠZ MODELLEMLERĠ
Yapılan hareketli kabin çalıĢmasında ANSYS Workbench programı yardımı ile 4 farklı analiz türü yapılmıĢ olup bunlar;
Statik analiz
Rijit dinamik analiz Flexible dinamik analiz DüĢme deneyi
Analiz modellemeleri geometri, bağlantı noktaları, mesh, yük ve sabitlerin uygulanması ve çözüm adımlarından oluĢur. Analizlerin modellenmesi tek tek anlatılacaktır. Analizlerde aynı olan bölümler birer kere geçilecektir.
ANSYS Worekbench’de analiz yapabilmek için modelin üzerinde değiĢiklikler yapılmalıdır. Bu değiĢiklikler ANSYS Workebench’de design modeler modülünde yapılır. Bu sebeple tasarım analiz modellenmelerine girilmeden önce design modeler modülü kısaca özetlenecektir.
6.1 DesignModeler
Design modeler, ANSYS Workbench yazılımının modelleme çözümleri veren bir modülüdür. Design modeler ile sıfırdan modelleme yapılabildiği gibi, analiz öncesi bir takım hazırlıklar da yapılabilir. Desing modeler, genellikle herhangi bir CAD yazılımından alınmıĢ olan modelleri analize hazırlama amaçlı kullanılmaktadır. Sonlu elemanlar analizlerinin temel mantığında bazı önemli noktalar bulunmaktadır. Bir analizci, katı modeli oluĢtururken analiz için öngörülmemiĢ olan bazı değiĢiklikleri analiz kısmına geçemeden önce düzenlemelidir. Genel anlamda analize önhazırlık olarak adlandırılabilinen bu hususlar kısaca;
BasitleĢtirmeler
Kontak bölgesi tanımlamaları imprint face
Bunun yanı sıra design modeler içersinde sıfırdan modelleme yapmaya yarayacak, geliĢmiĢ CAD yazılımlarında bulunan birçok özellikte mevcuttur.
ġekil 6.1’de face delete, boolen, imprint face seçeneklerinin menü görünümü gösterilmiĢtir.
a. Face delete
Delik, radüs gibi malzemeyi daha da karmaĢık hala getirecek yüzeyleri basit yüzeye çevirmemize yarar. Bunun için create\Face delete özelliğini seçip, delik, radüs yüzeylerini seçerek generate butonunu tıklamamız gerekir. ġekil 6.2’de face delete özelliği ile basitleĢtirilmiĢ yüzeyleri görülebilir.(Anonim 2010)
ġekil 6.2 Face delete özelliğinin uygulanması (Anonim 2010)
b. Boolean
Boolean komutu birden fazla malzemeyi birleĢtirerek tek bir malzeme haline getirmeye yarar. Komutu kullanmak için create\boolean seçtikten sonra ctrl yardımı ile tek parça olması istenilen parçalar tek tek seçilir ve generate sekmesi tıklanarak birleĢtirme iĢlemi tamamlanır. ġekil 6.3’ te sol kısımda üç parça olan cisim boolean komutu kullanarak sağ taraftaki tek parça cisim elde edilmiĢtir.
ġekil 6.3 Boolean komutunun uygulanması
c. Ġmprint face
Makine parçaları montaj halinde iken temas noktalarının gerçekçi olarak modellenebilmesi ve bunun yanında yüklemelerinde gerçekçi olarak uygulanabilmesi
yüzeylerinin kesilmiĢ hali gözükmektedir.
ġekil 6.4 Ġmprint face özelliğinin uygulanması
6.2 Statik Analiz
ġiddeti, doğrultusu, yönü ve uygulama noktası değiĢmeyen sabit yük ya da kuvvetlerle yapılan analizlerdir. Yapılan hareketli kabinin analizi parçalar halinde değil montaj halinde yapılmıĢtır. Montaj Ģeklinde analiz yapılmasının bazı artıları ve eksileri vardır. Bunlar;
Avantajlar;
Sistem bir bütün olarak incelenebilir,
Temas yerlerinde kontaklar verilerek pim ve yataklardaki kritik noktalar bulunabilir,
Daha net sonuçlara ulaĢılabilinir, Dezavantajlar;
Sistem montaj halde daha kompleks olduğundan çok elemana bölünür matematiksel iĢlem artar buda; çözüm süresini uzatır, mesh sayısını artırır, yüksek kapasitede bellek gerektirir ve daha güçlü bilgisayarlara gereksinim duyulur.
6.2.1 Statik analizin ANSYS Workbench’ de modellenmesi
Statik analizin ANSYS’de modellenme aĢamaları aĢağıda sıralanmıĢtır.
Sistemin 3D modelinin oluĢturulması Modelin Ansys workbench’ aktarımı Geometrinin düzenlenmesi
Simülasyona geçiĢ
Temas noktalarının belirlenmesi ve contact tanımı Sonlu elemana bölme (mesh)
Sabitlerin belirlenmesi Yüklerin uygulanması Çözüm yapılması
6.2.1.1. Modelin ANSYS Workbench’e aktarımı
Ansys design modeler\file\import external geometry file sekmesine tıklanıp oluĢturulan 3D modeli seçilir. Design modeler’ de ‘generete’ tıklanarak 3D model design modeler kısmına aktarılır. Design modeler ansys’de 3D çizim yapmasına olanak sağlayan, yapılan 3D modelde değiĢiklikler yapmasına izin veren, modeli similasyon için hazır hale getirilmesine yardımcı olan programdır.
Design modeler’de yapılan model ismi seçiliyken ‘new simulation’ sekmesine tıklanarak oluĢturulan ve daha sonra design modeler kısmında düzenlenen model, simülasyon kısmına aktarılır.
ġekil 6.6 Desing modeler’de düzenlenen 3D katı modeli simülasyon kısmına aktarma
6.2.1.4 Temas noktalarının belirlenmesi ve kontak tanımı
Design modeler’den simülasyon kısmına model aktarıldığında Ansys programı uygun gördüğü yerlere kendiliğinden otomatik kontak tanımlamaktadır. Bu kontaklar istenilen yerlerde olmadığından otomatik atanmıĢ kontaklar silinerek yerine uygun kontak tanımlanmalıdır. Yeni kontak tanımlamak için simülasyon kısmında iken unsur ağacında Project\Connections sekmesinde sağ tıklanıp insert\manual contact region seçilir. ġekil 6.7’de yeni kontak tanımlama gösterilmiĢtir. Yeni kontak sekmesi oluĢturulduktan sonra oluĢturulan kontak seçilerek kontak yüzeyleri ve kontak tipi belirlenir kontak tipleri: sürtünmeli kontak, sürtünmesiz kontak sabit bağlı kontak olarak seçilebilir. ġekil 6.8’de kontak tipleri ve temas yüzey seçim kutucukları gözükmektedir. ġekil 6.9’ da kontak tanımlanmıĢ geometri gözükmektedir.
ġekil 6.7 Yeni kontak tanımlama
ġekil 6.9 Kontak tanımlanmıĢ geometri
6.2.1.5 Sonlu elemanlara bölme (mesh)
Mesh iĢlemi modellemede önemli bir parametredir. Analizde sonuçların gerçeğe daha yakın olması istenilen bölgelerde mesh sayısı arttırılmalıdır. Optimum eleman sayısının belirlenmesinde ‘’element solution’’ ve ‘’nodal solution’’ bölümlerinden alınan sonuçlar mukayese edilir ve bu değerlerin birbirine en yakın olduğu çözümün eleman sayısı optimum eleman sayısı olarak kabul edilir. Eleman sayısı arttığında daha gerçekçi sonuçlar alınmasına karĢın bilgisayar kapasitesinin yetmeyebileceği ve çözüm süresinin uzayacağı unutulmamalıdır. Mesh sekmesi seçili iken body üstüne sağa tıklayıp mesh sizing özelliği seçilerek body üstünde mesh sayısı ve ya mesh metodu ile oynanabilir. ġekil 6.10’da mesh sayıları girilmiĢ model gözükmektedir.
ġekil 6.10 Mesh edilmiĢ hareketli kabin montajı
6.2.1.6 Sabitlerin belirlenmesi
Static structural seçili iken mesnet uygulanması istenen yüzeye fixed support sekmesi seçilerek istenen yüzeye mesnet konulabilir. Eğer mesnetlenecek yüzey daire ise clyindrical support sekmesi seçilerek mesnet konulabilir. ġekilde (A) ve (B) yüzeylerine fixed support sekmesi yardımı ile ankastre mesnet konulmuĢtur.
ġekil 6.12 Yük ve yer çekimi ivmesinin uygulanması
6.2.1.8 Çözüm yapılması
Solution\ Insert\ Stress, deforamtion, strain seçeneklerinden çözümde görmek istenilen deformasyon ya da gerilmeler seçilerek solve seçeneğini tıklanıp çözüm alınabilir. Hareketli kabin çözümlerinde von Mises teorisi kullanılmıĢtır. ġekil 6.13’te çözüme hazırlanmıĢ sistem görülmektedir.
ġekil 6.13 Çözüme hazırlanmıĢ model
6.3 Rijit Dinamik Analiz
Eğer mekanizmayı oluĢturan parçaların üzerinde oluĢan gerilmeler veya Ģekil değiĢtirme çıktılarından ziyade nasıl bir harekete sahip olacağı öğrenilmek isteniyorsa rigid dinamik modülü tercih edilir. Buda bize flexible dinamik modülüne kıyasla çok daha kısa sürede sonuçlanan bir analiz yapılmasına olanak sağlar ancak; rijit dinamik modülünde parçalar üzerinde deformasyon görülmez. Bunun nedeni malzeme rijittir ve sonlu elemanlara ayrılmamıĢtır. Rijit dinamik analizle modelin herhangi bir parçasının hareket esnasında, x, y, z eksenlerindeki konumu ve üzerine gelen gerilme değerleri sayısal olarak alınabilir.
6.3.1 Rijit dinamik analizin Ansys Workbench’te modellenmesi
Modelleme aĢamaları aĢağıdaki gibidir. Modelin oluĢturulması
Design modeler da düzenlenmesi Simülasyona geçiĢ
Malzemeyi rijit yapma Jointlerin tanımlanması Mesh tanımlanması
Deplasmanın verilmesi (pistona kuvvet uygulanması) Çözüm
ġekil 6.14 Malzemeyi rijit yapma
6.3.1.2 Jointlerin tanımlanması
Statik analizde sistemi sabitlemek için mesnetler kullanıldı, fakat rijit dinamikte mesnet ya da kuvvet uygulanamamaktadır. Bunun için mesnet uygulanması istenen yerlere sabit jointler atanacaktır. Connection \ insert\ joint sekmesine tıklanarak yeni joint oluĢturulabilir (ġekil 6.15)
ġekil 6.15 Yeni joint oluĢturma adımları
Daha sonra yeni oluĢturulan joint seçili iken ‘’connection type’’ kısmından body-body olan seçeneği body-ground ile değiĢtirilir bu Ģekilde sistem sabitlenmiĢ olunur.
ġekil 6.17 Refrans ve mobili seçilmiĢ montaj
Joint tanımlarken type menüsünde bulunan jointler (ġekil.6.18);
1: Sabit bir parçanın üstünde silindirik olarak dönen parçalar için 2: Birbirine sabit olarak bağlanan parçalar için
3: Birbiri üzerinde kayan yüzeyler için 4 Silindir pistonu için
ġekil 6.18 Joint çeĢitleri
6.3.1.3 Mesh tanımlanması
Rijit malzemeler sonlu elemana bölünmez bu yüzden çözüm süresi diğer analizlere göre çok daha kısadır.
6.3.1.4 Deplasmanın verilmesi (pistona kuvvet uygulanması)
Rijit malzemelere standart yerçekimi haricinde yük uygulanamamaktadır. Bunun yerine verilecek ağırlığa eĢit bir kütle çizilip yerçekimi olarak algılatılabilir. Hareketin sağlanması için pistonlara deplasman verilir. Rijit dynamic\insert\ joint condition seçilerek joint oluĢturulur.
ġekil 6.19 Deplasman için joint tanımlama
OluĢturulan joint seçilerek ‘’joint displacement’’ menüsüden joint özellikleri belirlenir. Scope seçeneği hareket edecek pistonu belirlenmesini sağlar. DOF kutucuğu hangi yöne hareket verileceğini belirler. Type kısmından vektör, kuvvet deplasman gibi pistona hareket verilecek tür seçilebilir. ġeki 6.20‘de joint displacement özelliklerinin girilmesi gösterilmektedir.
Magnitude kutucuğu değerleri nasıl girileceğinin belirlenmesini sağlar. DıĢarıdan hareket datası girilmesine olanak verir. Tabular date seçilip değerler elle girilebilir. Hareket edecek malzemenin kaç saniyede kaç mm hareket etmesi isteniyorsa bu bölümden girilebilinir.
6.3.1.5 Çözüm
Geometrinin tamamı rijit olduğundan geometri üstündeki gerilme değerlerini göremeyiz fakat sistemin nasıl hareket ettiğini görebiliriz
6.4 Flexible Dinamik Analiz
Hareketli olan makine parçalarını analiz edilmesini sağlayan bir modüldür. ÇalıĢtırılmak istenen mekanizmadaki parçaların deforme edilebilirliği göz önüne alınması gerektiği zaman flexible dinamik modülünü kullanmalıdır. Bu Ģekilde gerilime ve Ģekil değiĢtirme çıktıları incelenebilir. Bir mekanizmada atalet kuvvetlerinin etkileri ön plana çıktığında flexible dinamik modülünün kullanabilirliğinden söz edilebilir.
Eğer atalet ve sönümleme kuvvetlerinden söz edilmezse flexible dinamik yerine statik analiz yapılmalıdır.
Kuvvet karakterini belirleyen unsurlardan biri, bir kaçı veya tamamının zamanla değiĢmesi (Ģiddeti, yönü vb. zamanla değiĢen) halinde ortaya çıkan yük tipinin oluĢturduğu gerilmelerin analizleridir. Uygulamada makine ve makine elemanları çoğu kez bu tür gerilmeler altındadır. Bu analizde hareket anının her adımında bilgisayar bir analiz ortaya koymaktadır, bu yüzden filexible dinamik analiz diğer analizlere göre çözüm süresi çok uzun, karmaĢık ve boyut olarak çok büyüktür. Hareketli kabinde yapılan flexible dinamik analizlerin ortalama çözüm süresi 12 saattir. Bunun yanı sıra her bir flexible dinamik analizin kapladığı boyut ise 8 ila 12 GB olarak değiĢmektedir. Filexible dinamik analizde parça sayısının azlığı sistemin basitliği çözüm süresi ve boyut bakımından çok önemlidir. Hareketli kabinin flexible dinamik analizi için 8 çekirdekli 26 GB ram’lı endüstriyel bilgisayar kullanılmıĢtır.
Design modeler da düzenlenmesi Simülasyona geçiĢ
Flexible analiz seçilmesi
Malzemeyi flexible-rijit yapma Jointlerin tanımlanması
Mesh tanımlanması
Deplasmanın verilmesi (pistona kuvvet uygulanması) Çözüm
6.4.1.1.Flexible analiz seçilmesi
Simülasyon kısmında new analysis sekmesinden flexible dynamic modülü seçilerek modele eklenebilir. ġekil 6.21’de flexible dinamik analiz modülünün modele eklenmesi gösterilmiĢtir.
ġekil 6.21 Flexible dinamik analiz modülünün modele eklenmesi
6.4.1.2 Malzemeyi flexible-rijit yapma
Normalde sistemin tamamı flexible olması gerekir. Fakat çözüm kolaylığı olması adına, üstünde gerilme dağılımı görmemesi istenilen parçalar rijit olarak değiĢtirilir. Örnek olarak Ģekil 6.22’deki modelde 3 eleman flexible yapılmıĢtır. Buda sadece seçilen 3 elemandaki gerilme değiĢimini görülebileceği anlamına gelir.
ġekil 6.22 Sistemin bir kısmının flexible olarak çözdürülmesi
6.5 DüĢme Analizi
Adından da anlaĢılacağı üzere malzeme üzerinde düĢen bir parça etkisiyle, malzemenin üzerindeki gerilme değiĢimlerini ve uğradığı deformasyon değiĢimlerini alabildiğimiz bir modüldür. Bu modülde belirli bir yükseklikten belirli bir hızda belirli bir cisim baĢka bir cisim üzerine düĢürülebilir ya da çarptırılabilir. Çarpma etkisi ile oluĢan Ģekil değiĢimi ve gerilme değiĢimleri incelenebilir (TS EN 13001-1,2).
6.5.1 DüĢme analizinin ANSYS Workbench’de modellenmesi
DüĢme analizinin Ansys Workbench de modelleme aĢamaları flexible dinamik modülü modelleme aĢamaları ile aynıdır. Yalnızca düĢme analizinde, düĢen parçanın düĢme hızını girilmesi gereklidir.
Modelin oluĢturulması
Desing modeler da düzenlenmesi Simülasyona geçiĢ
Flexible analiz seçilmesi
Malzemeyi flexible-rijit yapma Jointlerin tanımlanması
Mesh tanımlanması
Deplasmanın verilmesi (pistona kuvvet uygulanması) DüĢme hızının girilmesi
6.5.1.1 DüĢme hızının girilmesi
Initial condition seçili iken input type menüsü constant velocity olarak değiĢtirilir (ġekil6.23).
ġekil 6.23 DüĢme hızı girilmesi
Define by menüsünden component seçilerek X,Y,Z düĢme yönlerinde istenilen düĢme hızı girilebilir. Geometry sekmesinden düĢmesi istenilen parça seçilebilir (ġekil 6.24)
mümkündür. Rijit dinamik analizle sistemin nasıl bir harekete sahip olduğunun yanı sıra sistemdeki herhangi bir parçanın hareket esnasında x,y,z eksenlerinde hangi konuma sahip olduğu sayısal değerler Ģeklinde alınabilir.
ġekil 7.1’deki hareketli kabin sistemindeki pistonlara deplasman değerleri girilmiĢtir. Bu değerler, A pistonuna 60 saniyede 590 mm, B pistonuna 60 saniyede 300 mm, C pistonuna ise 60 saniyede 180 mm ok yönü doğrultusunda verilmiĢtir.
ġekil 7.1 Deplasman uygulanan A, B, C pistonları
ġekil 7.1’deki A, B, C pistonlarına uygulanan deplasman değerleri ile sistem analiz edilmiĢ ve sistem ġekil 7.2’deki hareketi gerçekleĢtirmiĢtir. ġekil 7.2’deki hareket sistemin sorunsuzca çalıĢtığını göstermektedir.
ġekil 7.3 Hareket esnasında X,Y,Z eksenindeki pozisyonun gösterilen piston kolu
Pozisyon probu eklenerek sistem analiz edilmiĢtir. Sistemin ġekil 7.2’deki hareketine göre pozisyon probu eklenen piston kolu ġekil 7.4’te gösterilen koordinattaki yolu izlemiĢtir. ġekil 7.4’deki grafikte x ekseni kırmızı, y ekseni yeĢil, z ekseni mavi renklerle gösterilmiĢtir.
7.2 Statik Analiz
7.2.1 Hareketli kabinin statik analizi
ġekil 7.5’te hareketli kollara gelen maksimum gerilme 307 MPa’dır. Hareketli kollarda kullanılan AISI 1020 çeliğinin akma gerilmesi 351 MPa’dır. Bu değerlere göre emniyet katsayısı: 1.14 olmaktadır. Sistemin emniyet katsayısı 1,5 < S < 2 olarak belirlenmiĢti. Bulunan emniyet katsayısı istenilen değerlerde olmadığından sistemde iyileĢtirmeye gidilecektir (ġekil 7.10)
ġekil 7.5 Hareketli kolların statik analiz sonuçları
Sistemde hareketli kollara gelen maksimum gerilme pim yataklarındadır. Gerilme yığılmalarını azaltmak için pim yatakları geniĢletilerek gelen yükün birim yüzey alanına yayılması sağlanacak ve gerilme değerleri azaltılmaya çalıĢılacaktır.
Piston ve pimlerde oluĢan maksimum gerilme yapılan analiz sonuçlarına göre 548 MPa’dır (ġekil 7.6 ). Sistemde kullanılan alaĢım çeliğinin akma gerilmesi 620 MPa olduğundan sistemin emniyet katsayısı: 1.13’tür. Piston ve pimler için istenen emniyet katsayısı da düĢük çıkmıĢtır. Piston ve pimlerde de düzenlemelere gidilecektir.
ġekil 7.6 Piston ve pim gerilme analizi
Pimlerde ve pistonlarda oluĢan maksimum gerilme pimlerin yatatakla temas halinde oluğu bölgelerde olduğu ġekil 7.7’de gözükmektedir. OluĢan maksimum gerilme pimin yataklanan kısmının sol tarafıdır bunun nedeni operatör kabinin kapı kısmı sol tarafa doğru çıkıntı Ģeklinde yerleĢtirilmesinden kaynaklanmaktadır. Pimin yataklanan kısımlarındaki gerilmeyi azaltmak için pim çaplarını değiĢtirerek maksimum gerilme düĢürülemeye çalıĢılacaktır (ġekil 7.12)
Analizde malzemesi galvanizli çelik olan kabin maksimum gerilmesi 365MPa olarak bulunmuĢtur (ġekil 7.8). Galvanizli çelik akma gerilmesi 203 oluğundan emniyet katsayısı 0,55’tir. Kabin emniyet sınırları içinde olmadığından kabin üzerinde de değiĢikliklere gidilecektir (ġekil7.13)
ġekil 7.8 Kabinin statik analiz sonucu
Kabindeki maksimum gerilme hareketli kollarla kabin arasındaki temas yüzeylerindedir. (ġekil 7.9) Bunun sebebi hareketli kolun kabinle temas halinde olduğu bölgede çekme ve basma etkisi yapmasıdır.
ġekil 7.10 Pim yataklarının büyütülmüĢ resmi
Pim yatakları 23 mm yapıldıktan sonraki analizde maksimum gerilme 201 MPa düĢmüĢtür (ġekil 7.11). Yeni maksimum gerilmeye göre emniyet kat sayısı: 1.74’tür. 1.5 < S (1.74) < 2 olduğundan hareketli kollar emniyetlidir.
Pim çapları 40 mm’den 45 mm’ye çıkartılarak tekrar analiz edilmiĢtir (ġekil 7.12). Analiz sonucunda 548 MPa olan pim ve piston maksimum gerilmesi 311 MPa düĢmüĢtür. OluĢan maksimum gerilmeye göre sistem emniyet katsayısı: 1.99’a çıkmıĢtır. Sistem emniyet kat sayısı istenen değerlere ulaĢtığından sistem güvenlidir.
ġekil 7.12 Piston ve pim gerilme analizi 2
Kabin üstüne gelen maksimum gerilmeyi azaltmak için kabin üzerinde ġekil 7.9’daki gerilme dağılımına göre değiĢikliklere gidilmiĢtir. Bu değiĢiklikler ġekil 7.13’te oklarla gösterilmiĢ olan yüzeyler 3 mm kalınlaĢtırılmıĢ ve yine ġekil 7.13’te oklarla gösterilmiĢ destekler ilave edilmiĢtir.
Ġlave edilen kısımlarla birlikte kabin tekrar analiz edilmiĢtir (ġekil 7.14). Analiz sonuçlarına göre 365MPa olan maksimum gerilme 125 MPa’ya düĢmüĢtür. Yeni analiz sonucuna göre kabin emniyet katsayısı:1.62’ye yükselmiĢtir. Bu değer 1.5 < S < 2 arasında olduğundan kabul edilebilir bir değerdir ve kabin emniyetlidir.
ġekil 7.13 Kabin üzerindeki değiĢiklikler
7.3 Filexible Dinamik Analiz
Flexible dinamik analiz 2 kısımda yapılmıĢtır. Bunlardan birincisi hareketli kollara yataklık yapan kısımlar ve kabin, ikinci kısım ise hareketli kollar pimler ve kabin birlikte montaj edilmiĢtir. Sistemin bazı kısımlarının birleĢik Ģekilde analiz yapılmasının sebebi sistemdeki temas noktalarını azaltarak çözüme gidebilmektir. Ġki çözümde de kabinin çözüme katılmasının nedeni kabin alt kısmından kuvvet uygulayabilmek adına flexible tutulmasıdır. Flexible dinamik analiz ġekil 7.10, 7.12, 7.13’deki düzenlemeler yapılmadan önce yapılmıĢtır.
ġekil 7.15’deki hareketli kabin sistemindeki pistonlara deplasman değerleri girilmiĢtir. Bu değerler, A pistonuna 1 saniyede 400 mm, B pistonuna 1 saniyede 100 mm, C pistonuna ise 1 saniyede 300 mm ok yönü doğrultusunda verilmiĢtir
ġekil 7.15 Deplasman uygulanan A, B, C pistonları
Yukarda belirtildiği üzere Flexible analizde sistemin tamamı çözdürülemediğinden dolayı sistem 2 analizde incelenmiĢtir. ġekil 7.16’da oklarla gösterilen kısımlar analiz edilmiĢtir. Sistem analiz sonuçlarına göre maksimum gerilme pim yataklarında çıkmıĢtır.
ġekil 7.16 Flexible analiz çözüm 1
Pistonlara verilen deplasman değerleri ile sistem hareketi esnasında çözüm alınan parçalar üzerindeki gerilme değiĢimleri ġekil 7.17’de gösterilmiĢtir.
ġekil 7.17 Sistemin hareketi esnasında sisteme gelen gerilme değiĢimleri
Sistemin üzerine gelen gerilme değiĢimi ve sistem hareketi ġekil 7.18’de verilmiĢtir.
ġekil 7.18 Flexible analizde gerilme değiĢimi ve sistem hareketi
ġekil 7.29’daki 2. Kısım analizde oklarla belirtilen sistem elemanları analiz edilmiĢtir.
ġekil 7.19 Flexible analiz çözüm 2
ġekil 7.19’da gösterilmiĢ parçalar analiz edildiğinde sisteme gelen gerilme değerleri ġekil 7.20’de verilmiĢtir. Analiz edilen parçalar üzerinde en yüksek gerilme pimlerdedir.
ġekil 7.20 Sistemin hareketi esnasında sisteme gelen gerilme değiĢimleri 2
ġekil 7.21’de yukarıdaki deplasman değerleri uygulandığında malzeme üzerindeki gerilme değiĢimleri ve sistemin hareketi gösterilmiĢtir.
yapıĢır ve onunla birlikte hareket eder, enerji kayıpları meydana gelmez, kiriĢ lineer elastiktir, kiriĢin yer değiĢtirmiĢ biçimi, dinamik yük altında statik yük altındakiyle aynıdır ve kiriĢin potansiyel enerjisinin neden olduğu pozisyondaki değiĢim ihmal edilebilir. Genel olarak bu kabuller, eğer düĢen objenin kütlesi çok büyük ise ki bu kütle, kiriĢin kütlesi ile karĢılaĢtırılır, o zaman makuldür. Aksi taktirde bu basitleĢtirilmiĢ analizler geçerli değildir ve daha ilerlemiĢ analizlere ihtiyaç duyulur.
ġekil 7.22 KiriĢin Dinamik Yer DeğiĢtirmesi
Örnek olarak ġekil 7.22'deki AB kiriĢi göz önüne alınsın. Bu kiriĢin ortasına W ağırlığında bir obje düĢüyor. Yapılan kabullere dayanarak tüm iĢin obje tarafından yapıldığı söylenebilir. Bu iĢ objenin düĢüĢü boyunca olup, kiriĢin elastik gerilme enerjisine dönüĢtürülür. Bu iĢlem, objenin bir uçtan bir uca mesafe (h+δ) olana kadar sürer. Burada;
h: KiriĢin üzerindeki baĢlangıç mesafesi
δ: KiriĢin maksimum dinamik yer değiĢtirmesidir. Bu durumda yapılan iĢ;
W (h+ δ) (7.1)
olur.
Eğer P kuvvetini bırakırsak, kuvvetin kiriĢe, yer değiĢtirme maksimum olduğunda etki ettiği söylenebilir. Bu durumda P ile δ arasındaki iliĢki;
veya olur. (7.2)
Nedeni ise, dinamik yük altındaki yer değiĢtirme biçiminin statik yük altındaki yer değiĢtirme biçimi ile aynı olduğunun kabul edilmemesinden kaynaklanır. Bu yüzden kiriĢin gerilme enerjisiyle P kuvveti arasındaki iliĢki;
olur.
Yapılan iĢ, düĢen kütle ile (7.1)’deki gerilme enerjisi arasında eĢitlenirse;
W (h+ δ) elde edilir. (7.3)
Bu eĢitlik δ için 2.derecedendir ve bunun pozitif kökleri için çözülür;
(7.4)
burada kiriĢin statik yer değiĢtirmesi W ağırlığında δ sı Ģeklinde olur;
(7.5)
Bu durumda dinamik yer değiĢtirme için geçerli olan (7.4) denklemi daha basit bir Ģekilde aĢağıdaki gibi yazılabilir:
δ = (7.7)
durumunu alır. Denklem (7.6)'dan hesaplanan δ yer değiĢtirme miktarı genellikle bir üst limiti gösterir. Çünkü çarpma boyunca bir enerji kaybının olmadığını kabul edilmiĢtir.
TS EN 13000 Vinç güvenliği ve genel tasarım adlı standarda göre 2 m yükseklikten düĢen 7 kg ağrılığındaki çelik bir topun darbesi en fazla 50 mm Ģekil değiĢimi göstererek dayanabilecek özellikte olmalıdır
DüĢme hızı V = (7.8)
V= = 6.28 m/s (7.9)
Küre 6.28 m/s hızla kabin üstüne düĢmektedir. Küreye.6.28 m/s hız verilip yer çekimi ivmesi de eklenerek analiz edilmiĢtir.
Analiz sonuçlarına göre 2 metreden düĢen 7 kg ağırlığındaki çelik küre kabin üzerinde 4.1 mm Ģekil değiĢikliğine neden olmuĢtur. Bu deformasyon ġekil 7.23’de gösterilmiĢtir.
ġekil 7.23 Toplam deformasyon
ġekil 7.24’te Ģekil değiĢtirmenin zamana bağlı grafiği verilmiĢtir
ġekil 7.24 ġekil değiĢtirmenin zamana bağlı grafiği
Toplam Ģekil değiĢtirme 50 mm’den düĢük olduğundan kabin düĢmeye karĢı standartlara uygundur.
programları ayrıca sonlu elemanlar yöntemini kullanan ANSYS Workbench paket programı kullanılmıĢtır.
Hareketli operatör kabinin üç boyutlu özgün tasarım yapılmıĢ ve sonlu eleman yöntemiyle çalıĢan ANSYS Workbench paket programı yardımı ile analizi yapılmıĢtır. Analizler sonrasında tasarım parametrelerinin gerilme üzerinde etkileri incelenmiĢtir. Analizlerde optimum tasarım değiĢkenleri elde edilmeye çalıĢılmıĢtır. Sonlu eleman ağı oluĢturulurken eleman sayısının sonucu nasıl değiĢtirdiği incelenerek model için optimum eleman sayısı belirlenmiĢtir.
Kolların analizlerinde farklı saç kalınlıklarına karĢın gerilme dağılımları elde edilmiĢtir. Bu gerilme dağılımlarında görülen kritik yerler ilave lama ve saclarla güçlendirilerek yeniden gerilme analizleri yapılmıĢtır. Güçlendirmelerle genel konstrüksiyon sacı daha küçük değerlerde seçilerek sistemin hafif olması sağlanmıĢ hem de imalat maliyetleri düĢürülmüĢtür. Genel konstrüksiyon sacı 8 mm olarak seçilmiĢtir.
Hareket kolları için farklı kalınlıklarda gerileme analizleri yapılmıĢtır. Yapılan analizlere göre optimum sistem; hareketli kollarında kullanılan saç AISI 1020 malzemesi ve 8 mm kalınlıkta, hareketli kol üzerindeki yataklarda 23 mm’dir. Pimlere gerilmeler çok yüksek olduğundan akma gerilmesi daha fazla olan alaĢımlı çelik seçilmiĢ ve pim çapının minimum 45 mm olarak belirlenmiĢtir. Kabinde oluĢan gerilme daha azdır. Bu yüzden akma gerilmesi düĢük olan galvanizli çelik kullanılmıĢtır.
Statik ve dinamik analizlerde çözüm süresini ve modellemeyi kolaylaĢtırmak için üzerindeki gerilmenin düĢük olduğu bilinen temas noktaları birleĢik yapılabilir. Flexible dinamik analizde kritik olamayan bölgelerin rijit yapılması analiz ve modelleme süresini azaltır. Ayrıca yüksek kapasiteli bir bilgisayar olmadıkça karmaĢık modeldeki sistemler bütün olarak analiz edilmek yerine parça parça analiz edilmelidir.