T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
METRĠK OLMAYAN DĠJĠTAL KAMERALARIN HAVA
FOTOGRAMETRĠSĠNDE YAKIN RESĠM ÇALIġMALARDA(YERE YAKIN
YÜKSEKLĠKLERDE) KULLANILABĠLĠRLĠĞĠ ÜZERĠNE BĠR ÇALIġMA
Ali ULVĠ
DOKTORA TEZĠ
Harita Mühendisliği Anabilim Dalı
Ay-2015 KONYA Her Hakkı Saklıdır
TEZ BĠLDĠRĠMĠ
Bu tezdeki bütün bilgilerin etik davranıĢ ve akademik kurallar çerçevesinde elde edildiğini ve tez yazım kurallarına uygun olarak hazırlanan bu çalıĢmada bana ait olmayan her türlü ifade ve bilginin kaynağına eksiksiz atıf yapıldığını bildiririm.
DECLARATION PAGE
I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
Ali ULVĠ
ÖZET
DOKTORA TEZĠ
METRĠK OLMAYAN DĠJĠTAL KAMERALARIN HAVA
FOTOGRAMETRĠSĠNDE YAKIN RESĠM ÇALIġMALARDA(YERE YAKIN YÜKSEKLĠKLERDE) KULLANILABĠLĠRLĠĞĠ ÜZERĠNE BĠR ÇALIġMA
Ali ULVĠ
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Harita Mühendisliği Anabilim Dalı DanıĢman: Doçent Dr. Murat YAKAR
2015, 185 Sayfa Jüri
Doç. Dr. Murat YAKAR Prof. Dr. Ferruh YILDIZ Doç. Dr. Ġbrahim YILMAZ
Doç. Dr. Koray ÖZCAN Doç. Dr. Ömer MUTLUOĞLU
GeliĢen ve değiĢen teknoloji harita mühendisliğini özellikle fotogrametri anabilim dalını yakından etkilemektedir. Son yıllarda sayısal arazi verilerinin elde edilmesinde çok farklı seçenekler kullanıma sunulmaya baĢlanmıĢtır. Bunlardan biri Ġnsansız Hava Araçlarına metrik olmayan kameraların monte edilmesi yoluyla araziden sayısal verilerin toplanmasıdır.
Bu tez çalıĢmasında metrik olmayan dijital kameraların hava fotogrametrisinde yere yakın yüksekliklerde kullanılabilirliği çeĢitli uygulamalar eĢliğinde test edilmiĢtir. Elde edilen veriler sonucunda metrik olmayan kameraların ĠHA'lara monte edilerek, sayısal verilere ulaĢmada baĢarılı bir seçenek olduğu görülmüĢtür.
Anahtar Kelimeler: Fotogrametri, Ġnsansız Hava Aracı, Metrik Olmayan Kamera, 3B Model
ABSTRACT
Ph.D THESIS
A STUDY ON USABILITY OF NON-METRIC DIGITAL CAMERAS AT AERIAL PHOTOGRAMMETRY IN CLOSE RANGE STUDIES( AT NEAR TO
GROUND HEIGHTS)
Ali ULVĠ
THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCE OF SELÇUK UNIVERSITY
THE DEGREE OF DOCTOR OF PHILOSOPHY IN GEOMATIC ENGINEERING
Advisor: Assoc.Prof.Dr. Murat YAKAR 2015, 185 Pages
Jury
Advisor Assoc.Prof.Dr. Murat YAKAR Prof.Dr. Ferruh YILDIZ
Assoc.Prof.Dr. Ġbrahim YILMAZ Assoc.Prof.Dr. Koray ÖZCAN Assoc.Prof.Dr. Ömer MUTLUOĞLU
Developing and changing technology affect to the survey engineering, especially photogrammetry department. In recent years, many different options have started to use for obtaining the digital datas. One of these is the collection of numerical datas by assembling to the non-metric camera on the UAV.
In this thesis, the availability of non-metric digital camera was tested on close to the ground by using the various applications in the aerial photogrammetry. It was seen that the non-metric cameras mounted on UAV was a successful option in getting the digital datas as a result of the data obtained.
ÖNSÖZ
Bu Tez çalıĢmamda öncelikle tez konumu belirleyen, çalıĢmalarımın her aĢamasında yakın ilgi ve yardımlarını esirgemeyen çok değerli danıĢman hocam Sayın Doç. Dr. Murat YAKAR’ a sonsuz teĢekkürlerimi sunuyorum.
Ayrıca Tez çalıĢmamda bana yardımcı olan değerli arkadaĢım Öğr. Gör. Ahmet Suad TOPRAK’ a teĢekkür ediyorum.
Bunun yanında çalıĢmalarım sırasında gösterdikleri özveri ve desteklerinden dolayı bütün aileme ve Ceyda KARAGÖZ ' e çok teĢekkür ediyorum.
Ali ULVĠ KONYA-2015
ĠÇĠNDEKĠLER ÖZET ... 1 ABSTRACT ... 2 ÖNSÖZ ... 3 ĠÇĠNDEKĠLER ... 4 SĠMGELER VE KISALTMALAR ... 6 1. GĠRĠġ ... 7 2. KAYNAK ARAġTIRMASI ... 9 3. MATERYAL VE YÖNTEM ... 12 3.1. Fotogrametri ... 12 3.1.1. Fotogrametrinin sınıflandırılması ... 13
3.1.2. Yersel fotogrametri ve uygulama alanları ... 15
3.1.3. Hava fotogrametrisi ve uygulama alanları ... 16
3.1.4. Fotogrametrik değerlendirmede yöneltme iĢlemleri ... 16
3.2. Metrik Olmayan Dijital Kameralar ... 19
3.3. Ġnsansız Hava Araçları ... 21
3.4. ĠHA Fotogrametri ... 59
3.4.1. ĠHA Fotogrametri için Gereksinimler ... 61
3.4.2. ĠHA Fotogrametride kullanılan yazılımlar ... 63
4. YÖNTEMĠN UYGULANMASI ... 77
4.1. Metrik Olmayan Dijital Kameralarda Piksel Büyüklüğünün Hassasiyete Etkisi .... 77
4.2. Metrik Olmayan Dijital Kameralarda,Resim Çekim Ġstasyon Sayısının Fotogrametrik Değerlendirmede Hassasiyete Olan Etkisinin AraĢtırılması ... 82
4.3. Metrik Olmayan Dijital Kameraların Farklı Yüksekliklerde Fotogrametrik Değerlendirme Hassasiyetine Etkisinin AraĢtırılması ... 87
4.4. Ġnsansız Hava Aracı ile Kızkalesinin Hava Fotoğraflarının Çekilmesi ve Fotogrametrik Yöntemle Modellenmesi ... 91
4.5. ĠHA ile fotogrametrik çalıĢmalarda kullanılmak üzere YKN büyüklüğü araĢtırması ... 102
4.6. Metrik olmayan dijital kameraya sahip Ġnsansız Hava Aracı (ĠHA) ile üretilen Ortofoto Haritalarda Doğruluk Analizi ... 109
4.7.Geleneksel Hava Fotogrametrisi ve ĠHA Fotogrametrisinin maliyet yönünden karĢılaĢtırılması...126
4.8. ĠHA'na monte edilen metrik olmayan dijital kameranın hacim hesabında kullanılabilirliğinin araĢtırılması ... 130
4.9. Uçurtma Platformuna Monte EdilmiĢ Metrik Olmayan dijital kameranın Arkeolojik Dokümantasyon ÇalıĢmalarında kullanılabilirliğinin araĢtırılması ... 145
5. SONUÇLAR VE ÖNERĠLER ... 156 5.1 Sonuçlar ... 156 5.2 Öneriler ... 160 KAYNAKLAR………...………..161 EKLER ... 168 ÖZGEÇMĠġ ... 182
SĠMGELER VE KISALTMALAR
Simgeler
к1, к2, φ1, φ2 ve ω2 : BeĢ Bağımsız DıĢ Yöneltme Elemanı
P : Cisim Noktası
P', P'' : P Cisim Noktasının Birinci Ve Ġkinci Resimdeki KarĢılıkları O1, O2 : Birinci ve Ġkinci Resmin ĠzdüĢüm Merkezleri
X, Y, Z : Cisim koordinat sistemi
u', v', w' : Birinci Resim Koordinat Sistemi u'', v'', w'' : Ġkinci Resim Koordinat Sistemi
bx, by, bz : ĠzdüĢüm Merkezleri Arasındaki Baz Vektörü BileĢenleri
x', y',-c : P Cisim Noktasının Birinci Resim Koordinatları x'', y'',-c : P Cisim Noktasının Ġkinci Resim Koordinatları A' ve A'' : Birinci ve Ġkinci Fotoğrafla Ġlgili Ortagonal Matris X0, Y0 ve Z0 : Öteleme Parametreleri
φ, ω, к : Dönüklük Parametreleri
λ : Ölçek Katsayısı
A11, A12, A13, ..., A33 : A Ortagonal Matrisinin Elemanları
X, Y ve Z : Modeldeki Noktaların Arazi Koordinatları W, H : Kameranın Sensör Büyüklükleri
w, h : Kameranın Sensör Büyüklüklerinin Çözünürlüğü
c : Kameranın Asal Uzaklığı
h : UçuĢ Yüksekliği
mr : Fotoğraf Ölçeğinin Paydası
Mr : Fotoğraf Ölçeği
θ, φ ve ψ : Euler açıları
Kısaltmalar
CBS : Coğrafi Bilgi Sistemi Flight-CTRL : UçuĢ Kontrolcüsü
GNSS : Global Navigation Satellite System GPS : Global Positioning System
ĠHA : Ġnsansız Hava Aracı LĠPO : Lityum Polimer
PM : PhotoModeler
RTK : Real Time Kinematik SAM : Sayısal Arazi Modeli UAV : Unmanned Aerial Vehicle
VRML : Virtual Reality Modeling Language
VTOL : Vertical Takeoff and Landing(Dikey kalkıĢ ve iniĢ)
3B : Üç Boyutlu
KAP : Kite Aerial Photogrammetry INS : Ġnersiyal Navigasyon Sistemi
1. GĠRĠġ
Bilindiği üzere fotogrametrinin ilk uygulamaları yersel fotogrametri alanında yapılmıĢtır. Fotogrametri’nin ilk uygulamaları yersel fotogrametri ile baĢlamıĢ olsa da zaman içerisinde harita yapımında geniĢ olanaklar sağlaması nedeni ile yerini hava fotogrametrisi almıĢtır. Çünkü geniĢ alanların haritalarının yapımında hava fotogrametrisi ekonomi ve hız sağlamıĢtır. Birçok alanda olduğu gibi fotogrametri alanında da hızlı geliĢmeler olmakta, gittikçe kısalan zaman dilimleri içinde yeni metotlar geliĢmektedir. Özellikle son zamanlarda fotogrametri alanında da, dijital fotogrametri uygulamaları ile çok hızlı değiĢiklikler yaĢanmaktadır. Dijital fotogrametri sayesinde, gerek resim çekiminde, gerekse bu resimlerin değerlendirilmesinde büyük kolaylıklar sağlanmıĢtır.
Klasik hava fotogrametrisinde kullanılan ekipmanlar (özellikle kullanılan hava kameraları) açısından bakıldığında ürünlerin elde edilmesine kadar geçen süreçte maliyet çok fazladır. Ayrıca istenilen zamanda uçuĢ yapılamaması ve uçuĢ iznine tabi olmasıyla zamansal açıdan dezavantaj sağlamaktadır. Dolayısıyla resmi kurumlar haricinde hava fotogrametrisi sivil anlamda çok fazla talep görmemektedir.
Son zamanlarda, metrik olmayan dijital kameraların, yersel fotogrametri amaçlı değerlendirme çalıĢmalarında kullanımı oldukça yaygınlaĢmıĢtır. Bu tip kameraların yersel fotogrametri amaçlı metrik kameralara göre fiyatlarının çok daha düĢük olması kullanıcıların ilgisini çekmekte ve birçok projede yaygın olarak kullanılmaktadır (Yıldız ve ark.,2005). Fotogrametrik amaçlar için üretilmemelerine rağmen, film kameralarına oranla çok yoğun bir uygulama avantajına sahip olan dijital kameralar fotogrametri de güçlü ve etkin dijital veri elde etme aracı olarak kullanılmaktadırlar (Ahmad ve Chandler, 1999).
Büyük geliĢim gösteren ve kendinden söz ettiren taĢıyıcı platformlardan birisi de kuĢkusuz ĠHA’dır (KarakıĢ, 2011). ĠHA’ların kullanımı ile hem hava hem de yersel fotogrametrinin sağlamıĢ olduğu avantajları bir araya toplanmıĢtır. ĠHA askeri amaçlardan 3B modelleme, haritacılık, gözetleme ve izleme gibi farklı birçok amaç için kullanılmaktadır (Uysal ve ark., 2013). Metrik olmayan dijital kameraların ĠHA’lara entegrasyonu, fotogrametrik veri toplama ve değerlendirme iĢlemlerine yeni bir soluk katmıĢtır.
Bu çalıĢmada yeni bir sınıflandırmaya dayalı olarak metrik olmayan dijital kameraların ĠHA sistemlerine entegrasyonu ile fotogrametrik veri elde etme ve değerlendirme iĢlemleri için uygulanabilirliği araĢtırılmıĢtır. Bunun yanı sıra metrik olmayan dijital kameralar ile elde edilen hava fotoğraflarının hassasiyetinin belirlenmesi ve ĠHA'ların sınıflandırılması ele alınmıĢtır.
Bu çalıĢma kapsamında metrik olmayan dijital kameraların hassasiyet analizi, kültürel mirasların dökümantasyonu, ortofoto harita üretimi ve arkeolojik dökümantasyon uygulamaları araĢtırılmıĢ ve maliyet analizi yapılarak sonuçlar sunulmuĢtur. ÇalıĢmanın;
Ġkinci bölümünde izlenen yöntem ve ĠHA’ların bu uygulamalarda kullanımı ile ilgili literatür özeti sunulmuĢtur.
Üçüncü bölümünde kullanılan materyal ve yöntem ile ilgili olarak, Fotogrametrinin tanımı, sınıflandırılması ve kullanım alanları ile ĠHA’ların tanımı, sınıflandırılması ve kullanım alanları anlatılmıĢtır.
Dördüncü bölümünde Metrik Olmayan Dijital Kameralarda Piksel Büyüklüğünün Hassasiyete Etkisi, Metrik Olmayan Dijital Kameralarda,Resim Çekim Ġstasyon Sayısının Fotogrametrik Değerlendirmede Hassasiyete Olan Etkisinin AraĢtırılması, Metrik Olmayan Dijital Kameraların Farklı Yüksekliklerde Fotogrametrik Değerlendirme Hassasiyetine Etkisinin AraĢtırılması, Ġnsansız Hava Aracı ile Kızkalesinin Hava Fotoğraflarının Çekilmesi ve Fotogrametrik Yöntemle Modellenmesi, ĠHA ile fotogrametrik çalıĢmalarda kullanılmak üzere YKN büyüklüğü araĢtırması, Metrik olmayan dijital kameraya sahip Ġnsansız Hava Aracı (ĠHA) ile üretilen Ortofoto Haritalarda Doğruluk Analizi, Geleneksel Hava Fotogrametrisi ve ĠHA Fotogrametrisinin maliyet yönünden karĢılaĢtırılması, ĠHA'na monte edilen metrik olmayan dijital kameranın hacim hesabında kullanılabilirliğinin araĢtırılması, Uçurtma Platformuna Monte EdilmiĢ Metrik Olmayan dijital kameranın Arkeolojik Dokümantasyon ÇalıĢmalarında kullanılabilirliğinin araĢtırılması ile ilgili uygulamalar yapılmıĢ, uygulamaların yapım aĢamaları anlatılmıĢ ve hassasiyetleri incelenerek ara sonuçlar yorumlanmıĢtır.
BeĢinci bölümde Metrik olmayan kameraların fotogrametrik teknikler kullanılarak Ġnsansız Hava Araçları ile birlikte kullanılabilirliği araĢtırmasının sonuçları verilmiĢ ve önerilerde bulunulmuĢtur.
Ekler Bölümünde ise uygulamalarda kullanılan cihazların teknik özellikleri, ĠHA’ya Kamera ve Görüntü Aktarım Sisteminin entegrasyonu ve PM yazılımında Kameraya ait Ġç Yöneltme Parametrelerinin hesabında iĢlem adımları anlatılmıĢtır.
2. KAYNAK ARAġTIRMASI
Altan ve ark. (2004), çalıĢmalarında tarihsel yerlerin dokümantasyonu ve ölçülmesi ile ilgili yersel fotogrametri ile yüksek çözünürlüklü sonuçların elde edildiğinden ve klasik hava fotogrametrisi ile de yüksek maliyetli çalıĢmaların yapıldığından bahsedilmektedir. Patara antik kentinin hava fotoğraflarının balon ile çekildiği ve çizim çalıĢmalarının yapıldığı anlatılmaktadır.
Bilgi (2007), çalıĢmasında, dünyanın en eski bilimlerinden biri olan haritacılıktan ve bilinen en eski haritadan kısaca bahsetmiĢtir. Ayrıca, insanoğlunun yeryüzüne ait çeĢitli bilgilerin toplanması ve harita üretiminde etkili bir yöntem geliĢtirilmesi konularındaki gayretlerinin tarihsel süreci incelenecektir. Bu bağlamda söz konusu tarihsel süreçte önemli bir yeri olan fotogrametrinin, baĢlangıcından bugüne kadar geliĢiminde yer alan basamaklardan ve geliĢen teknolojinin kullanılması sonucu uzaktan algılamanın oluĢumundan ve bazı uygulamalarda kullanımından kısaca bahsedilmiĢtir.
Bigras (1997), çalıĢmasında arkeolojik araĢtırmalarda hava fotoğrafçılığında kullanılan platformlardan bahsetmektedir. Bu platformların avantajları ve hangi alanlarda kullanıldıkları anlatılmaktadır.
Eisenbeiss ve ark. (2005), çalıĢmalarında Peru da bulunan Palpa isimli arkeolojik bölgenin fotogrametrik dokümantasyonunu çıkarırken kullanılan model helikopterin kullanım olanaklarının araĢtırılması, elde edilen verilerin değerlendirilmesi ve yorumlanmasını yapmıĢtır.
Eisenbeiss ve Zhang (2006), çalıĢmalarında kültürel miras uygulamalarında kullanılan insansız hava araçları (ĠHA) yardımıyla üretilen ve yersel lazer tarayıcılarıyla üretilen çalıĢmaların karĢılaĢtırılması ve değerlendirmesini yapmıĢtır.
Eisenbeiss (2008), çalıĢmasında bağımsız uçuĢ yapabilen mini helikoptere takılan lazer scanner yardımıyla çeĢitli uygulamalar yapmıĢtır.
Eisenbeiss (2009), çalıĢmasında insansız hava araçlarının tarihi geliĢimini, kullanım alanlarını ve geçmiĢten günümüze yapılan çalıĢmaları değerlendirmiĢtir.
Ġnsansız hava araçlarını eksi ve artı yönleriyle değerlendirmiĢ ve birbirleriyle karĢılaĢtırmıĢtır.
Everaerts (2008), çalıĢmasında uzaktan algılama ve haritalama iĢlerinde Ġnsansız hava araçlarının kullanımı hakkında değerlendirme ve yorumlama yapmıĢtır.
Gawronski ve Boyarsky (1997), KAP bilimi, mühendislik ve diğer meslek uygulamaları ile son yıllarda daha ciddi bir geliĢim göstermiĢtir. DüĢük yükseklikli, büyük ölçekli hava fotoğrafçılığı genellikle konvansiyonel hava fotoğrafları elde etmek zor, pahalı ya da tehlikeli olacağı durumlarda haritalama ve kaynak araĢtırmaları için gereklidir. KAP çevresel saha değerlendirmesi için değerli olduğunu kanıtlamıĢtır.
Johnson ve ark. (1990), çalıĢmalarında güney Peru'daki Nazca Çölü'nde bazı canlı biçimlerini ya da çeĢitli geometrik biçimleri betimler tarzda yere çizilmiĢ, bazıları kilometrelerce uzunlukta olan Nazca çizgilerinin hava fotoğraflarıyla daha iyi görüntülenmesi çalıĢmaları yapılmıĢtır.
Kerle ve ark. (2008), çalıĢmalarında hava sensörleri kullanarak gerçek zamanlı veri toplama ve bilgi üretimi iĢlemlerinin nasıl yapılacağı araĢtırmıĢtır.
Özçelik ve BeĢdok (2009), çalıĢmalarında hedef izleme, arazi kullanım analizleri, orman alanlarının belirlenmesi gibi uygulamaları ele almıĢtır. Uydu görüntülerinin ve bu görüntülerden elde edilen verilerin ilgili kullanıcıya ve kuruma maliyeti küçümsenmeyecek boyutlarda seyretmektedir. Kısaca verinin elde edilmesi kolaylaĢtıkça maliyeti artmaktadır. Büyük ölçekli fotogrametrik uygulamalarda veri maliyeti kaçınılmaz durumdadır. Buna karĢın küçük ölçekli fotogrametrik uygulamalarda veri maliyeti açısından alternatif ölçüm yöntemleri geliĢtirilebilmektedir. Peng ve ark. (2008), çalıĢmalarında kentsel geliĢim ve değiĢimlerin daha iyi gözlemlenebilmesi için insansız zeplinin kullanılması çalıĢmalarını yapmıĢtır. Çekilen fotoğraflarda yüksek çözünürlüklü hava görüntüleri elde edilmiĢtir.
Ries ve Marzolff (2003), çalıĢmalarında orta Ebro havzasında su erezyonunun, uzaktan kumandalı bir helyum balonuna monte edilen fotoğraf çekme sistemiyle büyük ölçekli fotoğraflar çekilerek izlenmesi iĢlemlerini yapmıĢtır.
Rubio ve ark. (2005), çalıĢmalarında Ġspanya ve Clvnya arasında kalan arkeolojik bir çalıĢma alanında yapılmıĢtır. Helyum balon ve fotoğraf çekme aparatı kullanarak sayısal yükseklik modeli üretilmesi amaçlanmıĢtır.
Soro (2008), çalıĢmasında Ġtalya'daki Sardinya bölgesinde arkeolojik alan olan kültürel mirasın belgelenmesindeki fotogrametrik çözümlerin iĢlevselliğini araĢtırmıĢtır.
Theodoridou (2000), çalıĢmasında arkeolojik ölçümlerde ve bina inĢaatlarının kontrolünde radyo kontrollü model helikopterin kullanımının araĢtırılmasını gerçekleĢtirmiĢtir.
Wanzke (1984), çalıĢmasında antik yerlerin sıcak hava balonu yardımıyla stereofotogrametrik dokümanlarının elde edilmesi ve belgelenmesi çalıĢmaları yapmıĢtır.
Yakar ve Ulvi (2009), çalıĢmalarında Knidos antik tiyatrosunun hava fotoğraflarıyla 3 boyutlu modeli çıkarılmıĢ ve bununla birlikte restorasyon projelerine bir altlık olabileceği ortaya konmuĢtur. Bu alanda yapılmıĢ çalıĢma ile diğer tarihi mekânlarda bu örnek çalıĢmanın benzerinin yapılabileceği ortaya konmuĢtur.
3. MATERYAL VE YÖNTEM
Fotogrametrinin etkin bir Ģekilde kullanılmaya baĢlanmasından bu yana çok çeĢitli taĢıyıcı platform ve görüntüleme sistemleri kullanılmıĢtır. Helikopterlerden uçaklara, uzay mekiklerinden uydulara kadar bir çok taĢıyıcı platform, yapılan projeye uygunluğuna göre literatürdeki yerlerini almıĢtır. Son zamanlarda bu anlamda en çok kendinden söz ettiren taĢıyıcı platformlardan birisi de kuĢkusuz insansız hava aracı (ĠHA) dır . Günümüzde birçok farklı amaç için kullanılabilen ĠHA’lar fotogrametri için de taĢıyıcı platform olarak kullanılmaktadır. Uçak, helikopter, octocopter veya zeplin Ģeklinde farklı uçuĢ Ģartlarına sahip birçok ĠHA’dan bahsetmek mümkündür.
Tez kapsamında ĠHA, ĠHA’ da kullanılan metrik olmayan dijital kameralar, ĠHA görüntü aktarım sistemi, yer ve yapı kontrol noktaları, total station ve GNSS cihazları temin edilmiĢtir.
ÇalıĢmada ilk uygulama olarak metrik olmayan dijital kameraların hassasiyet analizi yapılmıĢtır. Bu kapsamda metrik olmayan dijital kameraların çözünürlüğünü etkileyen odak uzaklığı, konvergent çekim teknikleri, uçuĢ yüksekliği ve yer kontrol noktaları baz alınarak çözünürlük analizi yapılmıĢtır. Öncelikle odak uzaklığı aynı olan farklı metrik olmayan dijital kameralar laboratuar ortamında karĢılaĢtırılmıĢtır. ĠHA’lar dan elde edilen fotoğraflar yardımıyla fotogrametrik tekniklerle üretilmiĢtir. Uygulama alanında belirlenen 20 adet kontrol noktasının GNSS cihazı ile RTK yöntemiyle koordinatları ölçülerek kesin değer olarak kabul edilmiĢ, bu kontrol noktalarının fotogrametrik teknikle üretilen hâlihazır harita üzerinden değerleri bulunmuĢ ve bu değerler arasında y, x ve z koordinat farkları hesaplanmıĢtır. Hesaplanan bu fark değerlerine göre y, x ve z koordinatlarının karesel ortalama hatası hesaplanmıĢtır.
3.1. Fotogrametri
Fotogrametri, cismin bir veya birkaç resminden yararlanarak uzaydaki Ģeklini,boyutlarını ve konumunu incelikli bir Ģekilde belirlemeyi amaç edinmiĢ bir bilim dalıdır. Resimler üzerinde yapılan ölçmeleri kullanan bu tekniğin genel yararı cismin ayrıntılı olarak tam bir görünümünü vermesidir. Resim ölçmesi, geniĢ kapsamlı olarak
aslına uygun merkezi perspektiflerin oluĢturulmasına ait optik teknik yöntem olan fotoğrafçılığın ortaya çıkması ile pratikleĢmiĢtir. Fotoğrafik yöntemler, diğer yöntemlerin kullanılamadığı alanlarda kolaylıkla uygulanabilmektedir.
3.1.1. Fotogrametrinin sınıflandırılması
Fotogrametriyi, kullanılan kameranın durumuna göre, ölçülecek nesnenin yakın ve uzak oluĢuna göre, edinilecek bilgi türüne, değerlendirme yöntemine ve uygulama alanlarına göre sınıflandırmak mümkündür.
- Resim Çekilen Yerin Konumuna Göre
Yersel Fotogrametri: Yer üzerinde bulunan bir noktadan çekilmiĢ fotoğraflarla
çalıĢan bir tekniktir.
Hava Fotogrametrisi: Uçaktaki ya da genel olarak bir hava aracında bulunan bir
kamera ile çekilmiĢ fotoğraflarla çalıĢan fotogrametri tekniğidir.
Yakın Resim Fotogrametrisi: Nesne-kamera uzaklığı en çok 300 m olan bir
fotogrametri tekniğidir.
- Değerlendirmede Kullanılan Resim Sayısına Göre
Tek Resim Fotogrametrisi: Tek tek resimleri kullanarak metrik bilgiler üretmeyi
amaçlayan, foto plan, foto-mozaik üreten fotogrametri yöntemidir.
Çift Resim Değerlendirmesi: Ortak alanları bulunan fotoğraf çiftleri üzerinde
ölçüler yaparak bilgi üretmeyi amaçlayan fotogrametri yöntemidir. Çoğunlukla stereoskopik görüĢ de söz konusu olduğu için buna stereo fotogrametride denilmektedir.
- Değerlendirme Yöntemine Göre
Grafik (Plançete) Fotogrametri (1850-1900): Fotoğraflar üzerinden açı
(doğrultu) ve uzunluk ölçmeleri ile projektif ve perspektif geometrinin kavramlarını kullanarak çizgisel harita üretimi için kullanılan fotogrametri tekniğidir.
Analog Fotogrametri (1900-1980): Optik ve/veya optik mekanik değerlendirme
stereoskopi yoluyla tekrar elde edilmesi ve objenin çizimsel yollarla değerlendirildiği fotogrametri tekniğidir.
Analitik Fotogrametri (1970-1990): Çözümlerin matematiksel yöntemlerle
yapıldığı, stereo değerlendirme aletlerine bilgisayar ve elektronik ölçme sistemlerinin eklenmesi suretiyle bazı yöneltme, ölçme ve değerlendirme iĢlemlerinin otomatik ya da yarı otomatik yollarla değerlendirildiği fotogrametri tekniğidir.
Sayısal (Digital) Fotogrametri (1990- ): Sayısal forma dönüĢtürülmüĢ veya
sayısal olarak elde edilmiĢ stereo görüntülerin tamamen grafik iĢlemcili bilgisayarlar ile, bilgisayar ortamında tüm değerlendirme iĢlemlerinin yapıldığı fotogrametri tekniğidir.
- Uygulama Alanlarına Göre
Foto-Yorumlama: Fotoğrafik dokuyu inceleyerek nesne ve yakın çevresi
hakkında bilgi üreten, arazinin yapısını ve yüzey özelliklerini inceleyen fotogrametri kolu.
Metrik Fotogrametri: Fotoğraflardan konum, yükseklik, uzaklık, alan ve hacim
gibi metrik bilgilerin alınmasını ya da doğrudan doğruya harita çizimini amaçlayan fotogrametri.
Topoğrafik Fotogrametri: Topoğrafik harita üretimi ile ilgili haritacılık
fotogrametrisi.
Topoğrafik Olmayan Fotogrametri: Topoğrafik harita yapımı, topoğrafik
ölçmeler dıĢında, baĢka bir deyiĢle haritacılık fotogrametrisi dıĢında kalan fotogrametri.
Kadastro Fotogrametrisi: Kadastro haritalarının yapımında uygulanan
fotogrametri
Jeodezik Fotogrametri: Jeodezik nokta üretmede uygulanan fotogrametri
tekniğidir.
•Endüstri Fotogrametrisi: Yapı mühendisliğinde, metalürji, madencilik, gemi ve uçak yapımı, otomobil sanayi vb. alanlarda uygulanan yakın resim fotogrametrisi.
Mühendislik Fotogrametrisi: Mühendislik projelerinin hazırlanmasında vb.
çalıĢmalarda uygulanan fotogrametri.
Mimarlık Fotogrametrisi: Özellikle tarihsel değeri olan yapıların
belgelenmesinde uygulanan fotogrametri.
Ortofotografi: Çizgi harita ile aynı geometrik doğruluğa sahip foto haritaların (ortofoto) üretimi ile ilgilenen fotogrametri.
- Obje Büyüklüğüne Göre
Resim çekme makinesi ile cisim arasındaki uzaklığa bağlı olarak mikro ve makro fotogrametri olarak sınıflandırılır ve 25 m’ye kadar olan çekim uzaklıklarında uygulanır.
Mikro Fotogrametri: Resim çekme uzaklığının 0.1 m’den daha az olduğu
uygulamalara denir. Boyutları cm olarak ifade edilen veya daha küçük objelerin modellenmesi, ölçülmesi ve kalite kontrolünün sağlanması amacına yönelik olan bu sistem, aynı zamanda uydu ve uzay çalıĢmalarında kullanılan sayısal sensörlerin testi, kalibrasyonu ve modern görüntüleme ve ölçme çalıĢmalarında da kullanılabilmektedir.
Makro Fotogrametri: Resim çekme uzaklığının 0.1 m’den fazla olduğu
uygulamalara denir.
3.1.2. Yersel fotogrametri ve uygulama alanları
Fotogrametrinin ilk uygulamaları yersel fotogrametri alanında olmuĢtur. Fotoğrafın bulunuĢundan kısa bir süre sonra 1858 yılında Alman Meydenbauer, resmin nesnel içeriğini ölçme tekniği ile bütünleĢtirerek, yıkılan bir kilisenin eldeki mevcut fotoğraflara göre onarımını gerçekleĢtirmiĢtir. Fotogrametrinin topoğrafik olmayan uygulama alanlarında genellikle yerden çekilen fotoğraflardan yaralanılır. Bu nedenle topoğrafik olmayan uygulamalar yersel fotogrametri adı verilen bölüme dâhil edilmektedir. Yersel fotogrametrinin uygulanabilmesi için;
- Arazide yeterince yükseklik farkının bulunması - Arazinin açık olması
gerekmektedir. Ayrıca bu yöntemle büyük alanların haritalanması zor olmakta, çok sayıda Yer Kontrol Noktasının gerektirdiğinden, yapım zamanı ve maliyeti yükselmektedir. Yersel fotogrametri, incelenecek cismin ve kameranın hareket durumuna göre,
-Yarı statik (Hareketli cisimlerin, duran kameralarla çekilen resimleriyle incelenmesi),
-Dinamik (Hareketli cisimlerin, hareketli kameralarla çekilen resimleriyle incelenmesi)
olarak ayrılabilir.
Yersel fotogrametri, çok geniĢ uygulama alanlarına sahiptir. Bu alanlar, mimarlık, arkeoloji, endüstri, madencilik ve deformasyon ölçmeleri, taĢıt yollarının inĢası, su yapıları, tıp ve veterinerlik, kriminoloji, trafik kazaları, CBS vb. olarak sıralanabilir. GeliĢen teknoloji ile birlikte, yersel fotogrametrinin uygulama alanları kiĢinin hayal gücüne dayanmaktadır.
3.1.3. Hava fotogrametrisi ve uygulama alanları
Fotogrametri’nin ilk uygulamalar yersel fotogrametri ile baĢlamıĢ olsa da zaman içerisinde harita yapımında geniĢ olanaklar sağlaması nedeni ile yerini hava fotogrametrisi almıĢtır. Çünkü geniĢ alanların haritalarının yapımında hava fotogrametrisi ekonomi ve hız sağlamıĢtır. 1897’ de T. Scheimpflug, havadan çekilmiĢ fotoğrafları düĢeye çevirip, ölçeğe uygun olarak arazinin plana geçirilmesini sağlamıĢtır. Hava fotoğraflarının sistematik olarak kullanılması, 1. Dünya SavaĢı ile yaygınlaĢan motorlu uçakların geliĢmesiyle ortaya çıkmıĢtır. 1915 yılında O. Mester tarafından ilk seri ölçme kamerası üretilmiĢ ve arazinin Ģerit Ģeklindeki fotoğrafların çekilmesine imkân sağlanmıĢtır.
Hava fotogrametrisi atmosferde belirli bir yükseklikteki uçak vb. hava araçları yardımıyla elde edilen fotoğrafları kullanan fotogrametri tekniğidir.
Hava fotogrametrisi tekniği haritacılıkta standart bir harita yapım yöntemidir. Özellikle büyük alanların, ihtiyaç duyulan her türlü haritalarının üretiminde yaygın olarak kullanılmaktadır. Hava fotoğrafları, yalnız harita üretimi için değil baĢka amaçlar için de kullanılır. Örneğin, yer yüzeyinin yapısı ya da bitki örtüsü hakkında bilgi toplamak, bilgi sistemleri oluĢturmak gibi amaçlarla çekilebilir.
3.1.4. Fotogrametrik değerlendirmede yöneltme iĢlemleri
Fotogrametrik Değerlendirmede hangi yöntem kullanılırsa kullanılsın yöneltme iĢlemlerinin yapılması gerekmektedir. Fotoğrafların çekim anındaki konumlarının
yeniden elde edilmesi iĢlemine fotoğrafların yöneltilmesi adı verilir. Ġç ve dıĢ yöneltme olmak üzere iki adımda yapılır. DıĢ yöneltme, karĢılıklı yöneltme ve mutlak yöneltme olmak üzere iki aĢlamada yapılır. Genel olarak yöneltme iĢlemleri üç aĢamada gerçekleĢtirilir.
Bunlar; 1. Ġç yöneltme
2. KarĢılıklı yöneltme 3. Mutlak yöneltme’ dir.
- Ġç yöneltme
Ġç yöneltme iĢlemi, genel olarak çekim kamerası özelliklerinin değerlendirme aletine getirilmesi olarak ifade edilir. Sayısal fotogrametrik sistemlerde yapılan iç yöneltme, kalibrasyon raporundaki kamera bilgilerinin sisteme tanımlanmasıdır.
Diğer bir ifade ile iç yöneltme adımı, kameranın parametrelerinin belirlenmesi iĢlemidir.
- KarĢılıklı yöneltme
KarĢılıklı yöneltme ile fotoğrafın eğiklik ve dönüklükleri giderilerek fotoğraf çiftleri birbirine göre çekildiği andaki konuma gelirler. KarĢılıklı yöneltme ile arazinin ya da nesnenin 3B modeli elde edilir. Fakat bu 3B model araziye paralel ve ölçekli değildir.
Bir P noktasına iliĢkin iki izdüĢüm ıĢınının kesiĢebilmesi için, bu iki ıĢının bir düzlemde bulunması gerekir. Bu iki ıĢının aynı düzlemde olması düzlemdeĢlik (koplanarite) koĢulu ile sağlanır.
KarĢılıklı yöneltme ile her iki fotoğraftan elde edilen ıĢın destelerinin birbirlerine göre konumları ve duruĢları ayarlanır ve her iki fotoğraftaki eĢlenik noktalardan gelen ıĢınların birbiri ile kesiĢmesi sağlanır. KarĢılıklı yöneltme ile bir uzay modeli elde edilir. Bu adım sonunda beĢ bağımsız dıĢ yöneltme elemanı (к1, к2, φ1, φ2,
ω2) elde edilir.
KarĢılıklı yöneltme ile önce, karĢılıklı ıĢınlar birbiri ile kesiĢtirilir. Bir P noktasına iliĢkin iki ĠzdüĢüm ıĢınının kesiĢebilmesi için, bu iki ıĢının bir düzlemde
bulunması gerekir. O1, P' ve O2, P'' noktalarının aynı düzlemde olması koĢulu
düzlemdeĢlik koĢulu ile sağlanır. Bu koĢul, baz bileĢenleri ve O1P' ve O2P'' vektörleri,
O1 den geçen ve X, Y, Z eksenine paralel bir u, v, w koordinat sisteminde ifade edilirse,
u've u'' dir. Buna göre düzlemdeĢlik koĢulu eĢitlik 3.1 ile ifade edilir.
Bu denklemdeki u'v'w' ve u''v''w'' koordinatları x'y' ve x''y'' fotoğraf koordinatları cinsinden aĢağıdaki eĢitlikler ile ifade edilir.
Burada A' ve A'' birinci ve ikinci fotoğraf ile ilgili ortogonal matrisleri, x', x'' ve x'', y'' ise, birinci ve ikinci fotoğraftaki koordinatları göstermektedir. EĢitlik 3.1 ile verilen düzlemdeĢlik koĢulu, seçilecek 5 yöneltme elemanına göre doğrusallaĢtırılır. Elde edilecek denklem sistemi çözülerek seçilen yöneltme elemanları hesaplanır. Daha sonra mutlak yöneltme yapabilmek için noktaların model koordinatları hesaplanır.
- Mutlak yöneltme
KarĢılıklı yöneltme ile elde edilen uzay modelinin ölçeği belirsiz olduğu gibi, uzaydaki konumu ve yöneltmesi de belirsizdir. Bu modelin istenilen model ölçeğine getirilmesi ve arazi koordinat sistemindeki o cisme ait koordinat değerleri ile model koordinatlarının çalıĢacağı biçimde ötelenmesi ve döndürülmesi gerekir. Bu üç boyutlu bir benzerlik dönüĢümü problemidir. Ġki koordinat sistemi arasında üç öteleme (X0 Y0
(3.1)
(3.2)
Z0), üç dönüklük (φ ω к) ve bir ölçek (λ) söz konusudur. Üç boyutlu benzerlik dönüĢüm
formülleri eĢitlik 3.4 ile ifade edilir.
A11, A12, A13, ...., A33 katsayıları A ortogonal matrisinin elemanlarıdır. Bunlar φ,
ω, к dönüklük açılarının trigonometrik fonksiyonlarıdır. Toplam yedi bilinmeyenin çözümü için her iki sistemde de koordinatları bilinen ortak noktalara gereksinim vardır. Bu noktalar, fotoğraflar üzerinde koordinatları ölçülen, dolayısı ile model koordinatları hesaplanmıĢ olan ve arazi sisteminde de koordinatları bilinen kontrol noktalarıdır. Bu tür noktalar, bir model içinde yeteri sayıda olmalıdır. Pratikte de en az üç, dört, hatta daha fazla kontrol noktası vardır. Bu noktalarla ve dengelemeli bir çözüm yaparak dönüĢüm parametreleri hesaplanır. Bu parametrelerle, modeldeki tüm noktaların XYZ arazi koordinatları hesaplanır.
3.2. Metrik Olmayan Dijital Kameralar
Son zamanlarda, metrik olmayan dijital kameraların, yersel fotogrametri amaçlı değerlendirme çalıĢmalarında kullanımı oldukça yaygınlaĢmıĢtır. Bu tip kameraların yersel fotogrametri amaçlı metrik kameralara göre fiyatlarının çok daha düĢük olması kullanıcıların ilgisini çekmekte ve birçok projede yaygın olarak kullanılmaktadır(Yıldız ve ark.,2005).
Fotogrametrik amaçlar için üretilmemelerine rağmen, film kameralarına oranla çok yoğun bir uygulama avantajına sahip olan dijital kameralar fotogrametri de güçlü ve etkin dijital veri elde etme aracı olarak kullanılmaktadırlar (Ahmad, A. ve Chandler, J.H., 1999).
Dijital kameralar yakın resim fotogrametrisi ve bilgisayarda görüntüleme (machine vision)uygulamalarında yaygın bir biçimde kullanılmaktadır. Veri depolama kolaylığı, taĢınabilirlikleri ve hızlı veri iĢleme avantajlarına sahip olmalarından dolayı, bu kameralar endüstri teknolojisi ve yapısal hareketlerin izlenmesinde orta ölçekli film kameralarının yerini almıĢlardır.
Fotoğrafla ilgilenen birçok disiplin artık dijital kameraları kullanmakta ve kullanıcılarına daha etkin ve hızlı hizmet sunabilmektedirler. Fotogrametrik amaçlı tasarlanmamalarına rağmen, özellikle yakın resim fotogrametrisi uygulamalarında dijital kameralar veri elde etme aracı olarak kullanılmaktadırlar. Bunun yanında, son 1-2 yıldır deneme aĢamasında olan, havadan dijital kamera ile fotoğraf alımı artık kullanıma sunulmaya baĢlanmıĢtır. Böylece hava fotogrametrisi de görüntü alımı aĢamasında tamamen dijital teknolojiyi kullanmaya baĢlamıĢtır.(Karslı F. ve Ayhan E.,2005)
Fotoğrafik malzemede ortaya çıkacak önüne geçilmeyen hataların ölçme inceliğine etki etmediği ve mercek distorsiyonunun analog değerlendirme aletinde yapılacak çizimsel değerlendirmeler için ihmal edilebilir derecede olması , metrik makineler için ek Ģart olarak söylenebilir (Toz,1985). Bu özelliklere sahip olmayan makinelere de Metrik Olmayan Resim Çekme Makineleri adı verilir.
Metrik resim çekme makineleriyle kıyaslandığında , metrik olmayan resim çekme makinelerinde karĢılaĢılan sonuçlar ; düzensiz distorsiyon , iç yöneltmenin devamlı olarak değiĢmesi , orta nokta bulucularının olmaması , resim çekme makinesinin belirli bir doğrultuya yöneltilmesindeki zorluk , filmin düzgünlüğünü sağlayacak özel bir donanımın olmaması olarak sıralanabilir. Ġç yöneltmesi kararlı olan bazı makinelerde , orta nokta bulucuları gibi ek bazı donanımlar yardımıyla , metrik makinelerde olduğu gibi ayar yaparak iç yöneltme elemanlarını belirleme imkanı elde edilmektedir . Ancak bu ek donanımlar resim çekme makinesinin bedelini arttırmaktadır. Ġç yöneltmesi sabit olmayan ve orta nokta bulucuları bulunmayan resim çekme makinelerinde ayar iĢlemi , iç yöneltme elemanlarının bilinmeyen parametrelerini kullanılan matematik modelle ekleme imkanını veren analitik yöntem yardımıyla , her resim için tek tek yapılmalıdır(Göktepe A.,1998).
Ġç yöneltme elemanları:
•Asal noktanın koordinatları (Hx,y)
•ĠzdüĢüm merkezinin koordinatları (X0,Y0,Z0)
•Kamera odak uzaklığı c
Metrik resim çekme makinelerinin nitelikli bölgelerinin ( odak uzaklığı ve diyaframın değerine bağlı olarak ) kısıtlı olması ve fiyatlarının yüksekliği birçok kullanıcıyı metrik olmayan resim çekme makinelerinden yararlanma yoluna itmiĢtir. GeçmiĢte kullanılan metrik olmayan resim çekme makineleriyle pek iyi sonuçlar elde edilememesine karĢılık , günümüzdeki metrik olmayan resim çekme makinelerinin bu amaçlar için düzenlenmesi çalıĢmalarına baĢlanmasıyla çok iyi sonuçlar bulunmaktadır.
3.3. Ġnsansız Hava Araçları
3.3.1. Tanım
ĠHA'larla ilgili temelde birbirine benzeyen pek çok tanım karĢımıza çıkmaktadır.
Ancak bu tanımlamalarda zaman içerisinde ĠHA'ların yüklenecekleri görevlere yeni teknolojilere ve kullanım Ģekillerine göre değiĢiklik olabileceğini söylemek mümkündür.Günümüzde dünyada kabul görmüĢ bazı tanımlara aĢağıda yer verilmiĢtir(Kök T., 2012).
- Kuzey Atlantik AntlaĢması Örgütü(North Athlantic Traty Organization-NATO) kaynaklarında kabul gören ĠHA tanımı:ĠHA içerisinde Ġnsan olmayan uzaktan kumanda ilen veya otonom olarak kendisini yönlendiren motorlu itiĢ gücü olan silah veya faydalı yükleri ana gövdesine yüklenip çıkarılabilen,görev sonu geri dönerek iniĢ yapabilen veya hedefte silah olarak kendini imha edebilen araçlar olarak tanımlanmıĢtır(Pakkan ve ErmiĢ,2010).
- ABD Savunma Bakanlığının yapmıĢ olduğu ĠHA tanımı;
ĠHA, aracı kaldırmak için aerodinarnik güç kullanan, otonom ya da uzaktan bir pilotla kumanda edilerek uçabilen, geliĢtirilebilen ve iyileĢtirilebilen, ölümcül veya ölümcül olmayan yük taĢıyabilen ve insan operatörü içermeyen güçlendirilmiĢ bir hava taĢıtı olarak tanımlanmıĢtır(ITU,2005b).
- Ġnsansız Hava Araçlarının (ĠHA) farklı havacılık organizasyonları tarafından yapılan birden fazla tanımı olsa da, (Degarmo, M. T., 2004) uzaktan kontrol edilebilen veya önceden programlanmıĢ uçuĢ planı veya karmaĢık dinamik otomasyon sistemleri ile otonom olarak uçabilen, herhangi bir pilot taĢımayan, aerodinamik kuvvetleri kullanarak kaldırma kuvveti oluĢturan, motorlu tek ya da çok kullanımlık hava araçları olarak tanımlanabilir.
- Van Blyenburg, (1999), “ĠHA’lar insansız ve tekrar kullanılabilen motorlu araçlar olarak bilinmektedirler” diye belirtir.Bu araçlar uzaktan, yarı bağımsız, bağımsız kontrol edilir ya da bütün bu özelliklerin hepsine sahiptir. ĠHA ile insanlı uçakları
karĢılaĢtırdığımızda, tabiki en önemli fark, ĠHA ’nın uçağın içinde pilota sahip olmamasıdır.Bu mutlaka ĠHA bağımsız tek baĢına uçuyor anlamına gelmez. Birçok durumda, ĠHA’dan sorumlu mürettebat (operatör, yedekleme-pilot vs) geleneksel uçaktakinden (Everaerts, J., 2008) daha fazladır.
Yapılan tanımlar ve uygulamalara göre bir ĠHA sistemi, temelde hava aracı ve yer sistemi olarak iki ana bölürnden oluĢrnaktadır. Hava aracı: bünyesindeki faydalı yükleri, veri link hattının hava kısmını, görev bilgisayarı ve uçuĢ için gerekli tüm aviyonik(hava araçları üzerinde bulunan tüm elektrik ve elektronik sistemler) cihazlan ve haberleĢme sistemlerini taĢıyan kısmıdır. Yer sistemleri ise; hava aracının ve faydalı yüklerin kontrol edildiği, görevin planlandığı Yer Kontrol istasyonunu (YKĠ), veri iletim hattının yer kısmını oluĢturan Yer Veri Terminali (YVT), elde edilen faydalı yükün (görüntü, telemetri bilgileri vb) değerlendirildiği görüntü kıyrnetlendirrne birimi,görüntü almaya yarayan uzak görüntü terminali, alınan verileri iletmek için kullanılan uydu yer terminali ve bu sistemlerin sağlıklı çalıĢmasını sağlayan yer destek teçhizatı ve test bakım ekipmanlarından oluĢrnaktadır (AktaĢ, 2007 s.11-18).
3.3.2. Modellenme ve Benzetimi
ĠHA’ları altı dereceli serbestlik seviyesinde hareket eden, döner kanat ya da sabit kanatlı olan çeĢitli boyutlarda olabilen araçlardır. ĠHA ya da Hava Aracının modellenmesinin de buna göre yapılması ve tanımlanmasına ihtiyaç vardır. Bu amaçla öncelikle hava aracının konumunun nasıl tanımlandığı sonrasında ise hava aracı ve sensörlerin modellenmesi incelenecektir( Oğuz A.E.,Doktora Tezi,2012).
-Koordinat Sistemlerinin Tanımı ve Euler Açıları
ĠHA ve diğer hava araçları için çeĢitli koordinat sistemi tanımları yapılabilir ve Euler açıları dönüĢümü ile istenilen hareket denklemleri elde edilebilir.
Hareket denklemlerinin elde edilebilmesi için tanımlanan düzlemler Ģöyledir:
* Coğrafi koordinat sistemi
Bu sistemde boylam çizgilerinin baĢlangıcı Greenwich’den geçen boylam çizgisi,enlem çizgilerinin baĢlangıcı ekvatordur. Her bir noktadan geçen enlem çizgisinin ekvatordan derece cinsinden uzaklığına o noktanın Enlem’i, aynı noktadan geçen boylam çizgisinin baĢlangıç boylam çizgisinden açı cinsinden
uzaklığına Boylam’ı ve bu değerlerin bir arada ifadesine de Coğrafi Koordinatı adı verilir. Enlemler 0 ile 90 derece arasında, boylamlar 0 ile 180 derece arasında değer alır. Coğrafi koordinatlar aralarına nokta, virgül gibi herhangi bir iĢaret konmaksızın bir sırada yazılır. Ġlk olarak enlem derece değeri ve N (kuzey) harfi, sonra boylam derece değeri ve E (Doğu) harfi yazılır. Noktanın yeryüzünün güney – batısında olması halinde harfler S(güney), W(batı) Ģeklinde değiĢir. Türkiye için N ve E harfleri kullanılır.
* Dünya merkezli sabit düzlem
Bu koordinat düzlemi dünya merkezine sabitlenmiĢ bir düzlemdir. Burada Z ekseni dünya dönüĢ eksenidir. X ekseni ise Greenwich meridyeni ile ekvator çizgisinin kesiĢtiği noktadan geçer. Y ekseni ise sağ el kuralına göre belirlenir. Bu koordinat düzlemi her ne kadar Z eksenleri çakıĢık olsa da atalet düzlemi ile aynı değildir.
ġekil 3.1. Dünya merkezli Koordinat Sistemleri
* Atalet düzlemi (D I )
Bu koordinat sistemi dünyayı merkez alan ve orjini dünya merkezinde bulunan, dönmediği ve ivmelenmediği varsayılan koordinat sistemidir. ġekil 3.1’de görüldüğü gibi bu düzlemde Z ekseni dünya dönüĢ eksenidir. X ve Y eksenleri ise ekvator çizgisi üzerinde seçilir. Atalet düzlemi ile Dünya Merkezli Sabit düzlem Z eksenleri çakıĢık olmakla beraber X ve Y eksenleri dünyanın dönüĢ hızı olan 7,292115x10 -5 rad/sn hızla birbirleri üzerinde hareket ederler.
Bu koordinat sistemi dünyayı merkez alan ve orjini seyir sistemi üzerinde tanımlanan bir sistemdir. X yönü kuzeyi, Y yönü doğuyu ve Z ise dünya merkezini iĢaret eder. Bu düzlem genellikle ilk hareket anında gövde düzlemi ile aynı olarak seçilir ve dünya üzerinde sabit olarak durduğu kabul edilir. Böylece aracın hareketi sabit bir noktaya(seyrüsefer düzlemi orjini) göre takip edilebilir. Temel olarak seyrüsefer düzlemi dünya üzerinde belirlenen bir noktayı merkez kabul eden x ekseni doğu y ekseni kuzey ve z ekseni dünya merkezine doğru olan eksen takımını ifade eder.
* Gövde düzlemi (D b )
Bu koordinat sisteminin de merkezi ĠHA’nın ağırlık merkezidir. x yönü ĠHA’nın burnundan dıĢarı,y yönü ekseni kanattan dıĢarı, z yönü ise gövde ortasından dıĢarı (aĢağı) olacak Ģekilde tanımlanmıĢtır. ĠHA hareket ettikçe gövde düzlemi merkezi ĠHA ağırlık merkezinde olacak Ģekilde hareket etmekte yani ġekil 3.2’de görüldüğü gibi ĠHA gövdesi üzerinde sabit kalmaktadır.
ġekil 3.2. Ġnsansız Hava Aracı Koordinat Sistemi (Gövde Düzlemi)
Gövde düzlemi ĠHA koordinat sistemi olarak da adlandırılır. Bu düzlemin kullanılmasında amaç ĠHA merkezine göre hedef, iĢaretçi nesne gibi ihtiyaç duyulan tanımlamaların yapılabilmesi, ĠHA üzerinde oluĢan hareket ve dönülerin ölçülebilmesidir.
* Sensör düzlemi (Kamera)
Hava aracımızda kamera ġekil 3.3’de görüldüğü gibi tam olarak yere bakacak Ģekilde gövdeye doksan derecelik açıyla yerleĢtirilmiĢ olduğu kabul edilmiĢtir. ĠHA üzerinde sabit olarak yere bakan bir kameranın tanımlanması ve kullanılması, elde edilen görüntünün orantılı olacağı, görüntü iĢlemede kolaylık sağlayacağı düĢünülerek tercih edilmiĢtir. Sensör düzleminde x ekseni aĢağı doğru, y ekseni hava aracının kanat yönünde belirlenir. Bu durumda sağ el kuralı ile z ekseni de burun yönünde oluĢur.
ġekil 3.3. Sensör Düzlemi
* Euler açıları
Verilen bir eksen sistemin diğerine göre tanımlanması için açı dönüĢümlerine ihtiyaç vardır. Eğer bu eksenlerden birini seyrüsefer düzlemi ve diğerini de uçağa bağlı gövde düzlemi olarak düĢünürsek Euler açıları dönüĢümü olarak adlandırılan dönüĢüm vasıtası ile iki düzlemin birbirine göre tarifi yapılabilir. Euler açıları θ, φ ve ψ ile gösterilir ve yunuslama açısı, yana yatma açısı ve yönlenme açısı adları ile adlandırılırlar. Hava aracı üzerinde bu açıların gösterimi ġekil 3.4' de verilmiĢtir.
ġekil 3.4.Ġnsansız Hava Aracı Açı Sistemi( Araç Düzlemi)
Eksen sistemleri arasında dönüĢüm formüllerinin elde edilmesi için bir eksendeki dönüĢ hareketinin diğer eksenlere etkisinin hesaplanması ve sonrasında üç eksende arka arkaya dönüĢ hareketi olması durumunun ortaya konması uygun olacaktır (Hanlon, M., Kasım 2004). Z ekseninin sabit olduğu ve bu eksende olan dönüĢ hareketinin diğer eksenlere etkisi ġekil 3.6’ da gösterilmiĢtir.
ġekil 3.5. Euler açıları ile 1. dönüĢüm
Ġlk dönüĢüm z ekseni etrafında yönlenme açısı ile yapılır. Yeni bulunan düzlem D 1 ile gösterilebilir.
ġekil 3.6. Euler açıları ile 2. dönüĢüm
Ġkinci adımda y ekseni etrafının da bir dönüĢüm yapılır. Bu dönüĢümün diğer eksenlere etkisi ġekil 3.7 de gösterilmiĢtir. DönüĢüm sonucunda bulunan düzlem C 2 ile gösterilebilir. Ġkinci dönüĢümde kullanılan açı yunuslama açısıdır.
ġekil 3.7. Euler açıları ile 3. dönüĢüm
Üçüncü dönüĢüm ise yana yatma açısı kullanılarak x ekseni etrafında yapılabilir. Sonuçta seyrüsefer düzlemi olarak alınan düzlem ile gövde düzlemi arasında bir bağ kurulmuĢ olur.
3.3.3. Yararları
Ġnsanlı uçuĢ sistemlerine karĢı, ĠHA’nın en büyük avantajları; ĠHA insan hayatını tehlikeye atmadan riskli durumlarda ve ulaĢılamayan bölgelerde, alçak rakımda ve uçuĢ profilinin cisme yakın olduğu ve insanlı uçuĢ sisteminin uçamadığı yerlerde kullanılır.Bu bölgelerde, örneğin doğal afet yerleri dağlık ve volkanik alanlar, taĢkın ovalar, deprem ve çöl alanları ve kaza sahneleri,girilmesi zor olan bölgelerde, uçağın insansız kullanılabildiği yerlerde veya uçma izninin verilmediği yerlerde, bazen, tek seçenek ĠHA’dır.Ayrıca, bulutlu ve çiseleyen hava koĢullarında, ĠHA ile veri toplama mümkündür. Kötü hava koĢulları, insanlı uçakların içine konulan kameralarının,bu uçakların daha fazla yüksekliğe ihtiyaçları olduğundan, veri toplamalarına el vermemektedir.Buna ek olarak, ĠHA kullanmanın temel bir avantajı da psikolojik sınırlamalar ve pilotların ekonomik giderleri ile yük olmamasıdır.Dahası,ek avantajları, görüntü, video, ve yönelim veri bilgilerini yer kontrol istasyonuna gösterdiği gerçek zaman ve hızlı veri toplama kapasitesidir.
Piyasadaki ticari olmayan ĠHA sistemlerinin çoğu, düĢük maliyete odaklanır ve bu yüzden, ĠHA sistemlerinin kullanılmasının en büyük avantajı maliyettir. ĠHA sistemleri daha az maliyetli ve iĢletme masrafları insanlı uçak sistemlerinden daha düĢüktür.
Ama, bazen bir önceki bölümde bahsedilen uygulamaya bağlı olarak maliyet insanlı sistemlere benzeyebilir.Küçük çaplı uygulamalar içinse, insanlı uçakların masrafı karĢılanamayabilir, projeler genellikle mümkün olmaz ve bütün ihtiyaçlarının yerine gelmediğini kabullenerek, karasal sistemler alternatif olarak kullanılmak zorunda kalınabilir.Böylece, ĠHA sistemleri,belli alan uygulamalarında,karasal fotogrametri yerine veya ek olarak görünebilir.Karasal ve ĠHA fotogrametri birleĢiminde, aynı kamera ve nesneye olan aynı mesafe kullanımı,birleĢik veri iĢleme sürecini kolaylaĢtırır. Bu avantajlarının yanı sıra, ĠHA görüntüleri,aynı zamanda, mevcut 3D modelleri yüksek çözünürlüklü doku haritalama için görüntü düzeltme kullanılabilir.Rektifiye görüntüleri ve türevleri, görüntü mozaikleri , haritalar ve çizimler gibi görüntü yorumlanması için kullanılabilir.
Hem GPS / INS sistemlerinin hem de istikrar ve navigasyon birimlerinin uygulanması, bir tarafta, kusursuz uçuĢa, diğer taraftan, yeterli görüntü kapsama ve örtüĢmeye izin verir. Buda kullanıcının uçuĢ öncesi beklenen ürün doğruluk tahminlerini sağlar.
Döner kanatlı ĠHA baktığımızda, platform,dikey kalkıĢ ve iniĢ, gereken pist ihtiyacını ortadan kaldırır.Ayrıca, VTOL kullanımı (Dikey kalkıĢ ve iniĢ) sistemleri, kameralar yatay ve dikey yönde, havada asılı dönerken, veri elde edinilmesine izin verir.
3.3.4. Sınıflandırılması
- Kullanım alanlarına göre
- Askeri ĠHA Sistemleri
KeĢif, gözetleme ve istihbarat gibi bilhassa düĢman hava sahasında yapılan temel askeri görevlerde günümüze kadar çok sayıda can kayıpları yaĢanmıĢtır. Bu tür görevlerin yerine getirilmesi esnasında insan hayatının tehlikeye atılmaması düĢüncesi ve insan yapısını dayanamayacağı kadar uzun süreli görevlerde daha üst düzey bir performans gerekliliği, ĠHA’ların bu görevlerde kullanılmasını gerekli
kılmıĢtır. Bu sayede insanlı uçaklarla yapılan belirtilen görevler ĠHA sistemleri ile yerine getirilerek yukarıda bahsi geçen istenmeyen durumlar ortadan kaldırılmıĢ olmaktadır. Bu tür görevlerin yerine getirilmesinde yapılacak olan göreve göre ĠHA sistemleri gerekli donanımlarla (uydu iletiĢimi, haberleĢme, veri güvenliği, kendini koruma vb.) donatılmaktadırlar (URL-9, Masat M.,2013).
ĠHA Sistemleri geliĢim tarihçesinde yer alan ilk olgunlaĢmıĢ uygulamalar, belli bir hedefe doğrultulmuĢ mühimmat Ģeklinde tek kullanımlık uygulamalar, radarlarda gözlemlenen insanlı uçakların izini taklit eden sahte uçak uygulamaları, hava savunma atıĢ eğitimlerinde kullanılmak üzere hedef uçak uygulamaları Ģeklindedir. Bu temel uygulamaların ardından ĠHA üreticileri daha özel amaçlı uygulamaları gerçekleĢtirebilecek ĠHA sistemleri meydana getirmiĢlerdir. Bunlar arasında, biyolojik/kimyasal/radyoaktif türü tehdit unsurlarının tespiti, mayın arama, güvenlik koridoru açma vb. kulanım alanları ön planda sayılabilir (URL-9, Masat M.,2013).
- Sivil ĠHA Sistemleri
* Döner Kanatlı Sistemler
Bu sistemler güç kaynağını Ģarj olabilen pil ve yakıttan alan sistemler olmak üzere ikiye ayrılır.
** Pil ile çalıĢan sistemler:
4 kanatlı Quadrotor, 6 kanatlı Hexacopter ve 8 kanatlı Octocopter sistemlerdir.Bu sistemlere inceleyecek olursak;
*** Quadrotor (Dört Pervaneli)
Quadrotorlar kalkıĢ ağırlığı maksimum 5 kg olan hafif ağırlıklı sistemlerdir. Bu sistemlere, bazı ülkelerdeki yönetimler tarafından maksimum 5 kg’ a kadar kalkıĢ izni tanınmıĢtır.
Bu sistemlerin genel büyüklükleri 0.5m ile 2m arasındadır. Besleme üniteleri ise 4 adet elektromotordan oluĢmaktadır. Ağırlık kısıtlamaları nedeniyle, rüzgâr, uçuĢ yüksekliği ve sınırlı taĢıma kapasitesi gibi dezavantajları vardır.
Son zamanlarda bu sistemler güzergâh uçuĢu yapabilir hale gelmiĢlerdir. Bu sistemde hava fotogrametrisinde olduğu gibi uçuĢ planı yapılabilmektedir. Bu geliĢim ile fotogrametrik veri elde etme ve iĢleme anlamında büyük yol kat edilmiĢtir.
ġekil 3.8. Microdrone Quadrotor ĠHA (URL-6)
ġekil 3.9. Quadrotor ĠHA Microdrone’ nin UçuĢ Planı Yapım Örneği (URL-7)
*** Hexacopter (Altı Pervaneli)
Hexacopter kalkıĢ ağırlığı maksimum 5 kg olan hafif ağırlıklı sistemlerdir Bu sistemlerin genel büyüklükleri 0.5m ile 2m arasındadır. Besleme üniteleri ise 6 adet elektromotordan oluĢmaktadır. ÇeĢitli firmaların farklı isimler ile ürettikleri bir çok model bulunmaktadır.Genel özellikleri ise;
Tamamen manuel uçuĢlarda bile otonom pilot yardımı ile dengeli uçuĢ yeteneği,Ġrtifa Sabitleme,Carefree ( Yönelim Serbestliği) Özelliği,Yönelim Sabitleme Özelliği (Cihazın baktığı yeri sabitleme ),GPS ile Geri DönüĢ Özelliği,Cisim (Araba-Ġnsan) Takip Edebilme (opsiyonel),Harita Üzerinden Güzergah UçuĢu,Full Otonom UçuĢ,Güzergah UçuĢunda Kameranın Bakacağı Noktayı Belirleme,Kablosuz Veri Aktarımı ile birlikte ücretiz olan MKtool Programı OSD ekranı üzerinden dizüstü bilgisayarlarda cihazın pil durumunu,cihazın harita üzerindeki konumu,yönelimi ve yüksekliğini , Motor sürücü birimlerinin sıcaklıklarını, Cihazın uçuĢ modlarını, UçuĢ sürenizi ve cihaz ile ilgili diğer özellikler uçuĢ esnasında takip edebilmektesiniz.
Ayrı uçuĢ verilerinizi SD karta kaydedebilir . UçuĢ sonrası kaydedilen verileri inceleyebilirsiniz,Kumanda kesintisi gibi durumlarda motorların baĢladığı noktaya otonom geri dönüĢ ve iniĢ, 5.8Ghz 1000mW Kablosuz görüntü aktarım birimi ile AV çıkıĢ özelliğine sahip kameranız ile çektiğiniz görüntüleri canlı olarak max. 1 km mesafeden izleyebilme,3 eksenli kamera sabitleme ve açılır kapanır iniĢ takımı ile cihazdan bağımsız kamera kontrolü özelliklerine sahiptir.
ġekil 3.10. Droidworx Skyjib 6 Titanium RTF(URL-8)
*** Multicopter (Sekiz Pervaneli)
Multicopter seti uçuĢ ünitesi ve yer kontrol ünitesinden oluĢmaktadır.
UçuĢ ünitesinde;
UçuĢ Kontrolcü (Flight-Ctrl ) :UçuĢ kontrolcü uçuĢa hazır sisteminizin beyni
konumundadır. Sahip olduğu ataletsel algılayıcılar ile ilgili eksenlerdeki açıları ölçer ve bu değerlere göre motor sürücüler için gerekli sinyalleri üretir.
Seyir Kontrolcü (Navi-Ctrl) :UçuĢa hazır sisteminizde uçuĢ kontrolcü ile
birlikte kullanıldığında sisteme GPS sabitleme, güzergâh uçuĢu gibi GPS ve manyetometre algılayıcılarının sağladığı avantajları ekleyen birimdir. Birim manyetometre algılayıcısı içermektedir. SD kart bağlantısına izin verir. GPS birimi ile birlikte kullanılması gerekmektedir.
ġekil 3.11.Mikrokopter UçuĢ Elektroniği(URL-1)
GPS Birimi(MK-GPS):UçuĢa hazır sisteminizde uçuĢ kontrolcü ile birlikte
kullanıldığında sisteme GPS sabitleme, güzergâh uçuĢu gibi GPS ve manyetometre algılayıcılarının sağladığı avantajları ekleyen birimdir. Birim GPS algılayıcısı içermektedir. Seyir Kontrolcü (NaviCtrl) birimi ile birlikte kullanılması gerekmektedir.
Motor Sürücü Birimi ( BL-Ctrl) :UçuĢa hazır sisteminizde uçuĢ kontrolcü
ile birlikte kullanıldığında sisteminize ait fırçasız DC motorları süren birimdir. Motor sürücü birimi uçuĢ kontrolcü birimi ile I2C iletiĢim protokolü üzerinden haberleĢmektedir. Sahip olduğu sensörler ile motor sıcaklıkları, amper ve voltaj değerlerini sağlıklı bir Ģekilde uçuĢ kontrolcüye iletebilmektedir.
Mikrokopter Elektroniği Genel Görünümü Mikrokopter uçuĢ elektroniği genel görünümü ġekil 3.12’de gösterilmiĢtir.
ġekil 3.12.MK UçuĢ Kulesi Elektroniği(URL-1) ġekil 3.12’de gösterilen birimler aĢağıda belirtilmiĢtir; 1. Motor Sürücü (BL-Ctrl )
2. UçuĢ Kontrolcü ( Flight-Ctrl) 3. Navigasyon Kartı (Navi-Ctrl)
4. GPS Katmanı ( GPS sinyalini güçlendirmek için) ( GPS-Shield V1.1) 5. GPS ( MK-GPS)
6. Koruyucu Kapak
UçuĢa hazır sistemlerde önceden belirlenen bir yükseklikte kendini sabitlemesine yarayan ve tek tuĢla aktif edilebilen bir özelliktir. Bu özellik yardımı ile sisteminizin yükseklik kontrolü çok kolay bir Ģekilde gerçekleĢebilmektedir.
Yükseklik sabitleme fonksiyonu maksimum 250 metre yüksekliğe kadar kullanılabilmektedir. 250 metre üstü irtifalarda yükseklik sabitleme fonksiyonu otomatik olarak iptal olmakta ve manüel uçuĢ yapılabilmektedir. Eğer irtifanız tekrardan 250 metrenin altına düĢer ise yükseklik sabitleme fonksiyonu otomatik
olarak aktif olmaktadır.Ayrıca konum sabitleme özeliği ile UçuĢa hazır sistemin sahip olduğu GPS algılayıcı birimi sayesinde sisteminizin o an bulunduğu konumda asılı kalmasına yarayan ve tek tuĢla aktif edilebilen bir özelliktir. Bu özellik aktif edildiği anda sistem bulunduğu konumu yeryüzünde bir nokta (koordinat) olarak belirler ve bu noktada (koordinatta) sabit kalmaya çalıĢır.
Yer Kontrol Ünitesi:
Harita Üzerinden Otonom Güzergâh UçuĢ (Waypoint Flight): UçuĢa hazır
sisteminizin sahip olduğu bu özellik sayesinde tek tuĢ ile sisteminiz önceden ya da uçuĢ esnasında harita üzerinden belirlenen noktalara otonom uçuĢ yapabilmektedir (ġekil 3.13). Sisteminizin lisansız olarak motorların baĢladığı noktadan 250 metre yarıçap ve 250 metre yükseklikte otonom uçuĢ yapabilmektedir(ġekil 3.14). Harita üzerinde maksimumum 200 güzergâh noktası atanabilmekte olup sisteme tek bir seferde maksimumum 32 güzergâh noktası yüklenebilmektedir.UçuĢ mesafelerini yazılım yükseltmesi yaparak artırma olanağı bulunmaktadır.
ġekil 3.14.Harita Üzerinden Otonom Güzergâh UçuĢu Mesafeleri(URL-1)
MikroKopter Tool (MKTool) Programının Kullanılması
Mikrokopter MK Tools yazılımı ile uçuĢa hazır sisteminizin sahip olmuĢ olduğu uçuĢ elektroniğinin belli baĢlı ayarlarını yapabilir, harita üzerinden otonom güzergâh uçuĢu belirlenebilir ve sisteminizin anlık seyrüsefer durum bilgilerini bilgisayarınız veya tabletiniz üzerinden gözlemleyebilirsiniz. MKTool programı ana ekranı ġekil 3.15 de detaylı bir Ģekilde gösterilmektedir.
1- Sisteminiz üzerinde bulunan sensörlerinizin değerlerini grafiksel olarak gözlemleyebileceğiniz alandır.
2- Sisteminiz üzerinde bulunan sensörlerinizin değerlerini digital olarak gözlemleyebileceğiniz alandır.
3- Sisteminiz sahip olmuĢ olduğu uçuĢ elektroniğinin donanım ve yazılım sürümlerini görebileceğiniz alandır.
4- Sisteminiz sahip olmuĢ olduğu uçuĢ elektroniğinin her bir biriminin sağlıklı bir Ģekilde çalıĢıp çalıĢmadığını gözlemeyebileceğimiz durum alanıdır. Eğer uçuĢ elektroniğinizin birimlerinde herhangi bir problem yok ise her birim kendi durumunu yeĢil olarak gösterilecektir. Eğer uçuĢ elektroniğinizin birimlerinde herhangi bir problem var ise hatalı birim durumunu kırmızı olarak gösterecek ve bu alanda hatanın ne olduğu ile ilgili size detaylı bir bilgi verilecektir.
5- 1 numaralı alanda sensör değerlerini gözlemlemek için veri akıĢını “Start” ile baĢlatabilir ve “Stop” ile durdurabilirsiniz, ayrıca bu alanda “3D” sekmesini seçer iseniz sisteminizin üç boyutlu benzetim ekranına ulaĢabilir ve sisteminizin hareketlerini gözlemleyebilirsiniz “OSD” sekmesini tıklayarak harita üzerinden otonom güzergâh uçuĢu yapma ve sistemin gerçek zamanlı uçuĢ bilgilerini gözlemleme ekranını açabilirsiniz.
6- UçuĢ Elektroniğinizin belli baĢlı ayarlını yapabilmeniz için gereken ekranların açılmasını bu alandan yapmaktasınız.
7- Yazılım güncelleme ve kablosuz iletiĢim birimi COM port seçme ekranına buradan ulaĢabilirsiniz
8- Sensörel değerlerin kayıt dosyalarının yüklenmesi ve oluĢturulması ilgili alan.
9- Sisteminiz üzerinde bulunan ve sisteminizin tüm uçuĢ bilgilerinin saklandığı SD kart birimine ulaĢmanızı ve uçuĢ dosyalarınızı bilgisayarınıza yüklemenizi sağlayan sekmedir.
** Yakıt ile çalıĢan sistemler:
*** Helikopter:
Model helikopter havadan görüntüleme uygulamalarını daha çok tanıtım ve reklamcılık alanında kullanıyor olsa da, bu donanımların çevre ve arazi gözlemlerine yönelik küçük ölçekli fotogrametrik uygulamalarda da kullanılabilirliği söz konudur.
Model helikopterlerde teknolojik geliĢmelerden etkilenmiĢtir. Günümüzde diğer ĠHA’ larda mevcut olan GPS destekli ve düĢük maliyetli navigasyon sensörleri, stabil ve tamamen otonom veya önceden tanımlanan uçuĢ güzergahı gibi özellikleri barındırmaktadır.
2000 yılında, Zischinsky tarihi bir değirmeni 3 boyutlu modellemek için bir model helikopterden alınan görüntüleri kullanılmıĢtır. Binanın belgelenmesi için, helikopterden 82 fotoğraf alınmıĢtır. Helikopter özellikle çatı ve avlu görüntülerini almak için üzerinde küçük formatlı amatör kamera (37 ve 48 mm odak uzaklığına sahip Kodak DCS460c) monte edilmiĢtir (Zischinsky T., vd., 2000).
ġekil 3.17. Geocopter PH-X1B L-Sınıfı ĠHA (URL-15)
Helikopter ile ilgili diğer bir uygulama Jang ve arkadaĢları tarafından 2004 yılında eski kule ve Çin tapınak sitelerin temini için döner kanatlı ĠHA sistemi kullanılmıĢlardır. Helikopter maliyet, zaman ve ekonomik sebeplerden seçilmiĢtir. Seçilen helikopter Hirobo & Eagle 90 1.8m bir ana rotor çapı ve 8.5kg bir yük kapasitesi vardır.
ġekil 3.18.Hirobo & Eagle 90(URL-16)
* Sabit Kanatlı Sistemler
Sabit kanatlı ĠHA’ lar döner kanatlılara göre daha fazla uçuĢ süresine sahiptirler. Ayrıca dayanıklılık ve uçuĢ yüksekliği yönünden de avantajlıdır.
Sabit kanatlı sistemler fotogrametri ve uzaktan algılama uygulamaları için sahip olduğu yüksek rakım ve uzun dayanıklılık özellikleri ile idealdir .
Bu sistemlerde de uçuĢ güzergâhı tanımlanabilir. Sisteme kolon değerleri girilerek otonom uçuĢ gerçekleĢtirilebilir. Sabit kanatlı sistemlerin döner kanatlı sistemlere göre dezavantajı havada asılı kalamamasıdır.Bu sistemler güç kaynağını Ģarj olabilen pil ve yakıttan alan sistemler olmak üzere ikiye ayrılır.
** Pil ile çalıĢan sistemler:
Pil ile çalıĢan sistemler ilk uçuĢ hareketini fırlatıcı(Rampa) kullanan ve el ile fırlatılan sistemler olmak üzere ikiye ayrılırlar.
*** Fırlatıcı(Rampa) Kullanan Sistemler:
Günümüzde Ortofoto ve SAM üretimi için hazır set olarak kullanıcıya sunulan bu sistemler hem veri toplama, hem de veri değerlendirme safhalarını daha kolay hale getirmiĢtir. Bu sistemler rampadan fırlatma Ģeklinde otonom uçuĢa baĢlarlar.
ġekil 3.19. Trimble Gatewing X100 Sabit Kanatlı M-Sınıfı ĠHA (URL-17)
Gatewing konsepti iki elemandan oluĢur: Görüntülerin elde edilmesi ve görüntülerin iĢlenmesi aĢamasıdır. Görüntü elde etme, 150 m’lik bir varsayılan irtifada uçarken 5 cm çözünürlüklü görüntüleri alan yüksek kaliteli, ayarlı bir kamera ile donatılmıĢtır.UçuĢ irtifasını değiĢtirerek görüntü çözünürlüğü değiĢtirilebilir.
ġekil 3.20. Trimble Gatewing X100 ĠHA Fırlatma Rampası (URL-18)
Çizelge 3.1. X100 Teknik Bilgileri(URL-19)
Kategori Unsur Değer
Kanat Tip Lifting Body, sabit kanat
Ağırlık 2.0 kg, kanat açıklığı 100 cm
Kanat Alanı 23 dm²
Boyutları 100 x 60 x 10
Malzeme Karbon takviyeli EPP yapısı
Konfigürasyon Ġtme gücü Elektrikli, fırçasız, 250W itici güç
Batarya Lityum polimer 11.1 V, 8000 mAh
Yararlı yük AyarlanmıĢ 10 MP dijital kamera
Otomatik pilot Otomatik kalkıĢ ve iniĢ
Koordinat Takipli Navigasyon
Otomatik kamera tetikleme
Arıza emniyeti
ĠĢletme Sistem kurma süresi 15 dakika
KalkıĢ tipi Mancınıkla fırlatma
Tırmanma açısı 15 derece
Seyir süresi 45 dakika
UçuĢ Ġrtifası (AGL) 100 – 750 m
Seyir hızı 75km/saat
ĠniĢ Tipi Gövde üzerine iniĢ
Tavsiye edilen pist 100 x 30 m
yağmur
ĠletiĢim ĠletiĢim ve kontrol linki 2.4 GHz (varsayılan), 900MHz (opsiyonel)
ĠletiĢim ve kontrol menzili 5 km’ye kadar (2.4 GHz)
20 km’ye kadar (900MHz)
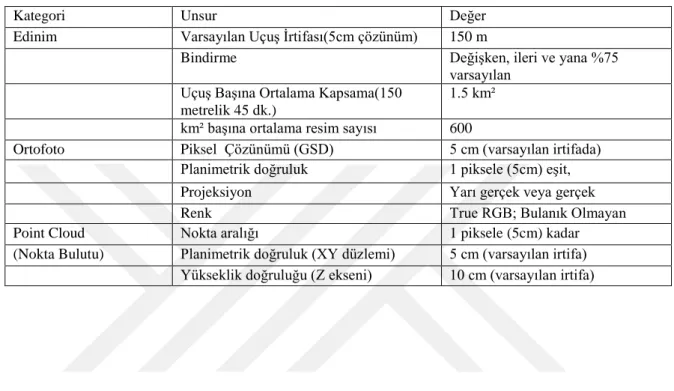
Çizelge 3.2. X100 Sonuç Verileri(URL-19)
Kategori Unsur Değer
Edinim Varsayılan UçuĢ Ġrtifası(5cm çözünüm) 150 m
Bindirme DeğiĢken, ileri ve yana %75
varsayılan UçuĢ BaĢına Ortalama Kapsama(150
metrelik 45 dk.)
1.5 km² km² baĢına ortalama resim sayısı 600
Ortofoto Piksel Çözünümü (GSD) 5 cm (varsayılan irtifada) Planimetrik doğruluk 1 piksele (5cm) eĢit,
Projeksiyon Yarı gerçek veya gerçek
Renk True RGB; Bulanık Olmayan
Point Cloud Nokta aralığı 1 piksele (5cm) kadar (Nokta Bulutu) Planimetrik doğruluk (XY düzlemi) 5 cm (varsayılan irtifa) Yükseklik doğruluğu (Z ekseni) 10 cm (varsayılan irtifa)
*** El ile fırlatılan Sistemler:
Bu sistemler ilk uçuĢ hareketini insan eliyle baĢlatan sistemlerdir.Bu sistem mantığı ile çalıĢan ilk örneğimiz ebee insansız hava aracıdır.
ġekil 3.22.ebee Ġnsansız Hava Aracı el ile fırlatılması
Ġnsansız ebee hava aracı çalıĢma mantığı Ģu Ģekildedir.
Araziye çıkmadan önce uçuĢ yapılacak alan emotion2 yazılımında google earth aracılığı ile görüntülenir.UçuĢ yapılacak alanda ĠHA'nın kaç metre yükseklikten uçulacağı, kolon bindirme oranları ve kolon sayısı hesap edilir.Önceden hazırlanan bu bilgilere göre uçuĢ yapılır.
ġekil 3.23. emotion 2 yazılımının görüntülenmesi Çizelge 3.3. Ebee ĠHA özellikleri
KANAT AÇIKLIĞI 96 cm
KALKIġ AĞIRLIĞI 700 gr