1997 IEEE International Symposium on Circuits and Systems, June 9-12, 1!197, Hoizg Kong
Robust
Least Mean Mixed
Norm
Adaptive
Filtering
for
a-Stable
Random
Processes
Gul A
y d z n l ,
0 . i ~ ~
Tanrzkulu2,
A.Enis
Cetznl
'Bilkent University,
Dcpartment
of
Electrical Engineering,
06533,
Bilkent, Ankara, Turkey
Imperial College
of
Science, Technology
and
Medicine,
Department
of
Electrical and Electronic Engineering
Exhibition
Road
London SW7
2BT,
United Kingdom
AB s T RAC T
Uased on the concept of Fractional Lower Order
Stat,ist,ics (FLOS), we present the Robust Least Mean
Mixed Norin ( R L M M N ) adaptive algorithm for ap-
plical,ioiis i r r impidsive environments inodeled by N-
ble distribut,ioiis. A sufficient condition for finite
variance of t,he iipdxte term i s obtained for the un-
tlrrlyirig u-stable process. Simula,tion results are pro- viclcd regarding t>he identification of the parameters
of air AR system.
In ina.iiy signal processing applica.tions the noise
is iiioclciid as a Gaussian stochastic process. This as- sumpt,iori ha,.; been broadly accepted due t o the Cen-
t r d Limit Theorein but a large class of physical ob-
tioiis such as low frequency atmospheric noise,
~ i ~ i ~ ~ r - i i i a ~ l ~ ~ noise and underwater acoustic noise ex-
hillit. uon-GaussitLii behaviour [1]-[4]. A class of statis- t,icaJ nrodels applicable in these cases is the a-stable
(0
<
Q5
2) distributions[5].
Having heavier tailst l i i ~ r i the Gaussian distributions, these distributions
1 spikes or occasional bursts in their re-
a
I
iz n t i oils.ci-stahle distributions do riot have closed form
proha.Ijilit~y density functioiis except the cases N = 1
( C a i i c h y tlistxibiition) and a = 2 (Gaussian distribu-
l . i o i i ) . Howc:vccr t,hcy have closed forrri characteristic
fiinct.ions givrn hy :
~ > ( t ) = fix[p{ist - ritl"[I
+
i p s g n ( t ) w ( t , a)]} ( I )wlicre ((1
<
n5
2 ) is the characteristic exponent,s is t,he location parameter,
j3
(--15
p 5
1) is theiiiclex of skewiiess, 7
>
0
is the dispersion parameter,sgn(. ) c l e n d PS tlic sigiium function ~ and
T h c distribution is called Symmetric a-Stable
( S Q S ) ,
if ,J' = 0 T h e parameter a controls the tails of the
distribution. For 0
<
a<
2 the distributions havealgebraic tail which are significantly heavier than the
exponential tail of the Gaussian distribution. T h e
smaller the value of the a , the heavier the ta,ils of
the distributions. This property makes the cvstable
distributions a n appealing model for impulsive noise
environments. It is well known t h a t if the noise is
impulsive, a1:gorithrns developed under the Gaussian-
ity assumption may produce unacceptable results, [5],
[el
'T h e Gaussian signals can be treated in a Hilbert
space framework which allows the use of La norm
in various optimiza.tion criteria. Whereas the linear
vector space genera.ted by a-st,able distributions is a
Banach space when 1
5
a<
2. In the Banach spa.ceof a-stable processes only L , norm exists for p
<
C Y ,hence the us'e of La norm is unacceptable in this case,
[51, [71 .
Due t o the heavy tails, stable distributions do not have finite second or higher order moments, except
the limiting case of a = 2. Let X be a n a-stable
random variable with 0
<
a<
2 , thenE[IXl'] = 00, if p
2
a . ( 3 )However, for 0
5
p<
a the Fractional Lower. OrderMonicnt (FLOM) is finite, i.e.,
E[lXlp]
<
00, if0
5
p<
C Y . ( 3 ).E[lXl']
<
00, for all p2
0. (5)If N = 2, then
T h e fractional p t h order moment [5] of an S N S
random variable wii h zero location parameter, a = 0 ,
is given by :
E[IXI"'] = C ( p , a)yp'" for 0
<
I,<
c v , (6) where111 Lqua.tioii { 7 ) , l( ,) denotes the gainina function. The constant, C ; ( p > (I,) depends only on Q and p.
In t>liis paper, based on the concept of FLOS, we
iiit,rotliicci a new family of adaptive filtering algorithms t,lrat i ~ t ~ i l i z e a linear mixture of moinent8s similar t.o
t,hr I,MMY algorit,hm [S,9]. It is assumed that the a- st,able noise lias finite mean corresponding 1
5
a<
2 .11 Tirr LMAIN XLGORII'HV I \ I M P U L S I L E
b:N V I R 0 H b1 E I\ T S
' T h i . 1,kIMN algorithm [SI is proposed for the cases \ v h ( > i i tlre noise distribution is a mixture of short and
Ioiig-tail tlist,rihutions. This algorithm coinbines the
Mt'an Square (LMS)
[lo]
and Least Mean Fourth) [ I l l algorithms. T h e cost, function and t,he
uliclat,c, c'qiiat,ion of the L M M N algorithm are respec- I i w l y given 1 3 ~ (8) 1 1 'L
4
.Jk = -XE[cl]+
-(1 - A)E[ei] i111(1 W k + i = Wk+
/ l e k ( x+
(1 - X ) & X k . ( 9 )The t m n p wvc-ights of t8he adaptive filter at time b are Wk = [ 1 i ) ( 1 , 1 . . . . ~ n ~ - l , k ] ~ . T h e input vector is X k =
[ . c ~ . . . . x ~ - n . ~ + I ] ' . The error signalis e k = d k - W k T X k
where i l k i s t,he desired signal. T h e step-size p which coiit#rols ( , ] l e spced of convergence and 0
<:
X5
1 ist,I it' mixing 1) ara.inet er. , ,
111 .App(-\iidix-I, the update equation of the L M h I N
algorit,liiii is st,iidied for a-stable distributions. It is
slio~vn k,lr;rt the variance of the gradient vector is 1111-
l)owidid3 i . e . ~
E[/IWk+i - WlcII:] = W .
(10)
poiids t o unstable behaviour that agrees
pwcisely with our experimental evaluations. 11.1 , > ' / U ) u l a t i o n ,$t,udies
Coiisider a n AR,(Df) a-stable process, defined as f'ollonh,
i = l
wlieue 111; is a symetric cy-stable ( S n S ) distribution.
If { b } is a n absolutely summable sequence, then x k
;\Is0 liiis R syminetric S a S distribution with the same
paraiiietrrs as Pl,k [5, 121.
i h i h K ( ' L ) process with parameters 61 = 0.99 and
li? = -0. L is ideiitified by using the LMMN algo-
ri(lriri, where iiiput, signal z k is generated from a S a S
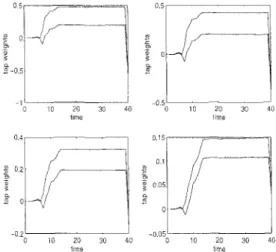
process with a = 1.2. T h e transient helmviour of
the adaptive weights are illustrated in Fig. 1 for one
realization. T h e mixing parameter values are cho-
sen as X = 0.1, 0.3, 0.6, and 0.9 a i d the st,ep-size
is U, = 5.2 x lO-'.The LMMN algorithm experiences
divergence for all values of X even if very small s k p -
sizes are used
.5r!
2t a 0:::/
:02p-j
B I I$ 0 0 5 O o l i r i 1-0.5 1 -0 5 0 10 20 30 40 0 10 20 30 40 lime time 0.4 2 0 -0 2 0 10 20 30 40 -0 05 0 10 20 30 40 m e timeFig. 1. Transient behaviour of tap weights for the 1,MMN
algoritlirii for a SmS input with o = 1 . 2 . Divergence in all
cases w i t h A = 0.1. 0 . 3 , 0.5, 0.9.
111. ROBLST LMMN ADAPTIVE FILTERING
In order to ensure finite varknce, i.e.
,
of t h e gradient vector for a-stable distributions, the
L M M X algorithm is modified by using the concept of
FLOS. In particular, the fact t h a t in impulsive noise, t h e variance of the fractional lower order error
is bounded. Based on this observation we introduce
the Robust-LMMN
(RLMMN)
algorithm as :Wl.+l = WI:
+
/ L ~ ; ' > ( A+
(1
- A){e:a>}2)X~e(14)
where X k = [.zk<a>,,,.z:t-fif+l<a>] . Unlike t h e LMNlN
algorithm, the RLMMN algorithm is expected to yield
well-behaved convergence in impulsive noise environ-
ments. Note t h a t , the actual weights define a stable
stationary point of iterations for the RLMMN algo-
rithm.
-
TIn Appendix-11, it is shown t h a t a sufficient con-
dition for the validity of the condition in (12) is
111 I ,Szitt ulntzoii Stiidaes V . APPENDIX-I
7 ’ 1 1 ~ FT,O5 based R L M M N algorithni is compared i o tli(. Normalizcd Least Mean-p Norm ( N L M P ) [7]
,ilgoi i t h i n The update equation of the N L M P algo-
ritliin I \ givcm h y
. < p - l >
whcrt. 1
5
1)<
a, E>
0 and p is choscn such t h a t t h eYLMP
algorithm is stable.In Fig. 2 ) tlie results of a system identification ex- pt,riiirc,nt a r c presented. Note that CY = 1.2 and X =
0.9. A 1 1 AR,(5) process with parameters bl = 0.890,
h2 1 -0.152, hr3 = 0.100, b4 = -0.197 and b5 = 0.097
is gcrierat,ed which is driven by an i.i.d. S a S ran-
I L ~ . T h e system mismatch is obtained
l l W k - W,
11;
over 100 Monte Carlo tri- a n d W, are respec1,ively the current or a.iitl t h e optimal solution. T h e per-c‘ K L M M N algorithm is comparable
wit,li t,lic N LNIP algorithm depending on the mixture
pilralilct,(:r. Note t h a t , the step-sizes are chosen as p = 5.2 x I O - “ for both algorithms and the steady-
em iirisniatches are approximately equal.
O Y , T - - - -.. .~ ~ , . . ~ --. - _ 1000 2000 3000 4000 5000 6000 I l n X Fig. 2 .
a i i d tlir Nl,‘\dP algorithm (dashed) for CY = 1.2 arid X = 0.9.
1111. b y s k i n riiisiiiatch for R L M M N algorithm (solid)
1V. C O N C L U S I O N
Tlic- R o l ~ ~ i ~ l - L i \ i l M N adaptive algorithm is proposed for i,lii: ~ t p p l i c n t i o ~ i s wliere the signals have a n impul-
5iT.e l ~ i ~ d ~ ~ r < ~ . A Iiound is obtained on thc variance of
1,Iie grailiciit vector of‘ fhe proposed algorithm. Simu- lation rc~srilts are presented for adaptive system iden- 1, i 1 i c a 1,ioii.
The unbounded behaviour of the LMMN algo-
rithm for a-stable processes is proven below. Let
e k = d k - WkTXk = VkTXk (17)
where
(18) a
Vk =
w,
- WI;is the weight error vector. Since Vk - Vk+l =
Wk+l -Wk, the weight update equation of tlie LMMN
algorithm can be written in terms of Vk as :
~ k + = l Vk -- p e k ( X
+
(1 - X)e;)Xk (19)arid
p2E[(VrlXh)2(X
-t
(1 - X ) ( V ~ X , ) ” ) 2 ~ ~ X I ; $ ] . (20)Having infinite value of (20) can be simply shown
by considering the term, E[(VZXI,)
I
IXkI
l a ] ,
after ex-panding the parerit hesis. By using the “indepeiidence
theory assumption” in
[lo]
aiid assuming t h a t VI, andXI, are independent, we have
2 2
i = l
We have E ~ X ~ ~ , ~ ~ & / ~ ~ ] = 00, since
E[zi-,]
= 00within this (3xpectation and therefore, (10) is proven
for T,MMN algorithm under ru-stable distributions
VI. APPENDIX-I1
In order to prove (15) the update equation of tjhc
RLMhlN algorithm can be rewritten in terms of v k
as 1
< U >
[5] M.
Shao andC.L.
Nikias, "Signa.1 Processing withFractional Lower Order Moments : Stable Processes
and their Applications, " Proc. IEEE, Vol. 81, pp.
986-1009, 1993.
[6] S. A . Kassam, Signal Detection in Non-Gaussian Noise. N e w York: Springer, 1988.
[7] 0. Ariltaii, A. E. Cetin, and E. Erzin. " Adaptive
Filtering for Non-Gaussian Stable Processes," IEEE
Transaction o n Signal Processing Letters, Vol. 1, pp.
2
A
$- ( l - A ) { ( v k T x k ) < a > } ' ]~ ~ x k l i ~ '
(23) By using t,lre Hijlder inequality,IVkTXk/
L
llVI;lllllXkllm (24)i n (2:3), TTC obt,aiii
1
1wktl
-w k
11;
5
p2I
IvI;
11;'
I
IxI;
I
I z [ X 2+
2X( 1 -A)
[a]
0. Tanrikulu, J . A . Chambers and A.G. Constan-tinides, Least Mean Mixed-Norm Adaptive Filter-
ing," Electronics Letters, Vol. 30, N o . 19, pp. 1574-
1575, Sep. 1994.
[9]
0. Tanrikulu and J . A . Chambers, "Convergenceand steady-state properties of the Least Mean Mixed
Norm (LMMN) adaptive algorithm" ,to appear in IEE
Proceedings- VIS, 1996. If t8hr statist,ical independence assumption of VI; and
Xk is iiscd oiice inore, we have E[I I W ~ + I ~ W k
II;]
5
~ ~ ' [ ~ ' E [ I I V I , ~ ~ ~ ~ ] E [ ~ ~ X I ; ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~
[ l o ]
S.
Hayltin Adaptive Filter Theory,
Preiitice Hall,N J , 1986
A IEEE Trans. 1984, IT-30, pp.275-283.
[la ] Y. Hosoya, "Discrete Time Stable Processes and
Their Certain Properties, " Ann. Prob., Vol.
(5,
No.Since x k - j = IlXkll,
<
00, from(as),
we obtainU
<
a18(26)
as a sufficient condition for the fulfillment of the con-
tlitioii in (12). It is a.ssumed t h a t no parameter-
i z r clivergc.nce occurs in the R L M M N algorithm) i.e.,
su1)i; ~ ~ V I ; ~ ~ m
<
i-10. In this case, even if VI; is a SCYS w c t o r prowss, when (26) isvalid, we have E[I/VI,II;"]<
x , E[ilVklI':"]
<
00 a.nd E[llV~;il:"]<
00.1, p p . 94-105, 1978.
V I I . REFERENCES
[I]
13.Ma.iidelbrot and J . W . V a n Ness, "Fractional Brow-I I ~ R I I i\/lol,ions, Fractional Noises, and .4pplicatioiis,"
C U I , Vol. 10, pp. 422-437, 1968.
[;'I
S',S.Pilla.i, h/I. Harisankar,''
Simulat,ed performanceof a. DS spread spectrum system in impulsive atmo-
spheric noise, '' IEEE Trans. Electromagmtic Com- p t . . Vol. 2 9 % p p . 80-82, 1987.
[3] hl. Uouvet a,nd S.C. Schwartz, "Comparison of
atlaptivc ancl robust receivers for signal detection in
nmhieiit underwater noise, " I E E E Trans. Acous.
,h'peech ciizd Signal Proc., Vol. 37, pp. 621-626, 1989.
[4]
D.
I\/liddletoii, " Sta.tistica1 Physical Models of Elec-t,roiiiagnetic interference, " IEEE Transactions on Elec-
troi~iagiietzc Coinpat., Vol. 19, pp. 106-127, 1977.