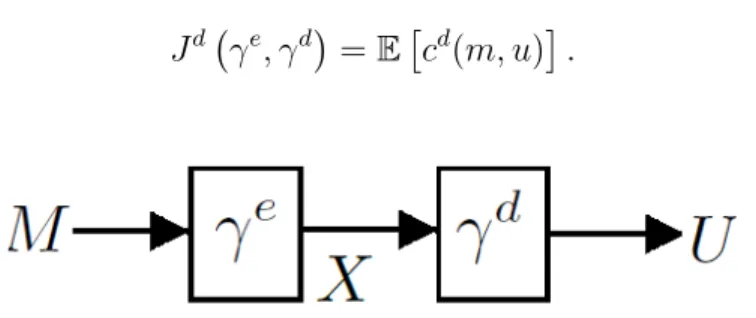
Signaling games in networked systems
Tam metin
Şekil




Benzer Belgeler
One alternative approach, the entrapment of enzymes in conducting polymer matrices during electrochemical polymerization, is attracting great interest, because it
Official change in the TL per dollar rate is the variable proxying for the economic risk factors where premium for US dollars at the free market rate and annualized dividend yield
Ulusal Kongremizde bu y›l da konusunda yetkin yerli ve yabanc› konuflmac›larla panel, sempozyum, uzman›na dan›fl ve bildiri sunumlar›yla bilgilerimizi
But now that power has largely passed into the hands of the people at large through democratic forms of government, the danger is that the majority denies liberty to
This study provides clear evidence of and outcomes about the effects of the magnitude of overhead cost on the difference in the results of ABC and TDABC
Bu varsayımlar çerçevesinde Tablo 4’te kore- lasyon analiz sonuçları incelendiğinde, ekonomiklik boyutu ile kurumsal iletişim, kurumsal davranış ve algılanan kurumsal
Dutch juvenile idiopathic arthritis patients, carers and clinicians create a research agenda together following the James Lind Alliance method: a study protocol.. 2018; Available
LPS ile deneysel olarak sepsis oluşturulan ratlarda, intestinal apopitoz üzerinde poly ADP ribose sentetaz inhibitörü 3 AB’nin rolünü araştıran bir çalışmada, H/E ve M-30
