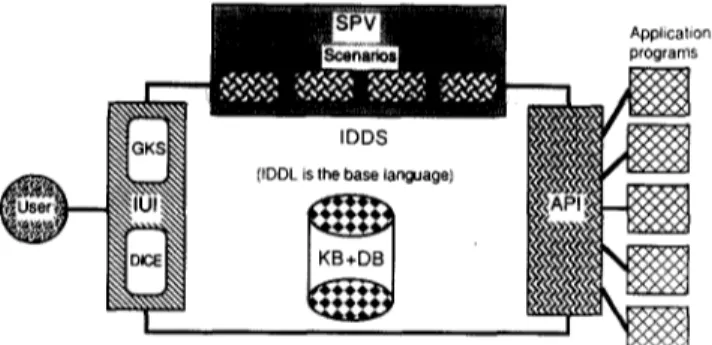
A fundamental and theoretical framework for an intelligent CAD system
Tam metin
Şekil

Benzer Belgeler
Aşağıda düşüm yataklarının sonundaki oyulmalar hakkında yapılmış olan çalışmalar hakkında bilgi verilmiştir. Aksoy [1] “Yüksek düşülü barajların
Bu besi ortamı için organogenezin görüldüğü eksplantlar incelendiğinde %3 sükroz ortamında %6 sükroz içeren ortama göre kallus + sürgün oluşumu %47.2,
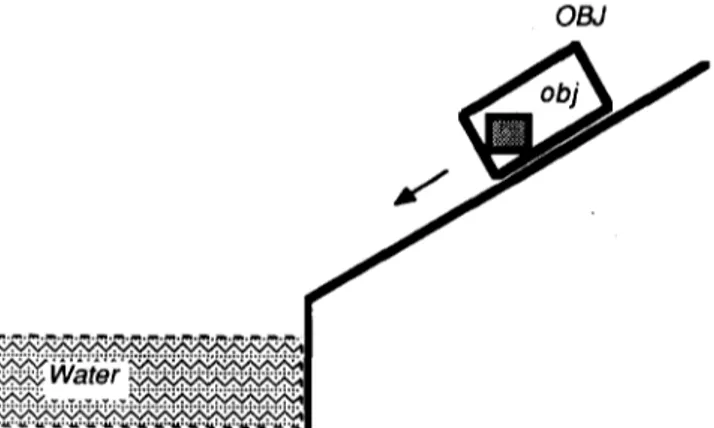
The aim of this thesis is to build an intelligent water volume measurement device that calculates the water volume for any shape of tank precisely by
than five or six fundamental competencies. It‟s also hard to find company produced list of core competencies in case it‟s containing a list of 19 to 29 capabilities but, it is most
Starting from Chapter 3 to Chapter 8, we applied the Hirota direct method to the several examples which we may separate them in two parts: the equations writ- ten as a single
arasındadır. Bu nüshanın istinsah tarihi ve müellifi belli değildir. Ancak mecmuanın fizikî konumu ve yazıya nazaran 18. yüzyılda istinsah edildiği söylenebilir.
1327 senesinde tahta çıkan Edward zamanında lisana Fransızca ve İtalyanca ve Rumca- daıı pek çok kelimeler alınarak bu muhtelit lisan resmî ve ilmi ve
Zaman zaman kapitalist sistemin zorlandığı veya toplumun çaresiz kaldığı anlarda rejimlerin temel sorunu başka nedenselliğe bağlanır, Nietzsche’nin modernizm bunalımı
