Envanter Kontrol Sisteminde Ölü Zamanın İncelenmesi
Görkem Arasıl1, Ali Fuat Ergenç21Doğuş Üniversitesi, Endüstri Mühendisliği, İstanbul [email protected]
2İstanbul Teknik Üniversitesi, Kontrol Mühendisliği, İstanbul [email protected]
Özet:
Bu çalışmada, üretim-envanter sistemlerinin ve daha da geniş alanda ele alınırsa tedarik zinciri sistemlerinin kaçınılmaz bir parçası olan ölü zaman kontrol mühendisliği bakış açısıyla incelenmiştir. Zaman gecikmesinin matematiksel olarak gösterilebildiği sürekli akış modeli, üretim-envanter sisteminin dinamiğini ifade etmek için kullanılmıştır. Burada ölü zaman, sistem dinamiğine daha gerçekçi bir yaklaşımda bulunabilmek için birinci dereceden eksponansiyel gecikme olarak ele alınmamış, saf ölü zaman olarak kabul edilmiştir. Sistemde, satış değerleri ileri besleme yolunda sisteme bozucu etki olarak yer almış ayrıca ortalama satış değerlerini elde etmek için giriş fonksiyonu olarak kullanılmıştır. Üretim hızının belirmesinde P tipi kontrolör kullanılmıştır. Bu çalışmanın amacı sistemin kararlılığını farklı gecikme değerleri açısından incelemek ve envanter düzeyini istenilen seviyede tutmaktır. Bunlara ek olarak da, karar merciinde bulunan kişilere satış ve envanter değerlerini dikkate alarak üretim hızının nasıl ayarlanmasının gerektiği ile ilgili bir fikir sunmaktır.
Anahtar Kelimeler: envanter kontrolü, kararlılık, tedarik zinciri, üretim hattı, zaman gecikmesi 1. Giriş
Rekabetin giderek arttığı üretim sektöründe var olabilmek için maliyetleri düşürmek kaçınılmaz bir hale gelmiştir. Maliyetleri etkileyen faktörler incelendiğinde karşımıza üretim hızı, ara stok seviyeleri, envanter düzeyi, taşıma sistemleri gibi birçok değişken çıkmaktadır. Bu alanda çalışan araştırmacılar imalatı etkileyen faktörleri var olan kısıtlar dahilinde maliyeti en düşük seviyeye getirmeye amaçlayan yöntemler üzerinde çalışmaktadırlar. Günümüzde kullanılan bu yöntemlerin büyük çoğunluğu üretim-envanter sisteminin ortalama performansına ya da kararlı hal durumuna dayanmaktadır.[2]. Bu varsayımlara dayanarak oluşturulan yöneylem araştırması modelleri uygulanabilirliği ve yöntem çokluğu nedeniyle tercih edilse de, sistem dinamiğini anlamada ve sürekli değişen koşulların yol açtığı parametre değişimlerine cevap vermede yetersiz kalmaktadır. Sıkca rastlanan diğer bir metod olan kesikli olay simülasyonu istatiksel yöntemleri kullanarak sistemin dinamik davranışını modellemeye çalışır. Güçlü bir modelleme tekniği olmasına rağmen büyük ölçekli üretim sistemlerinin gerçek zamanlı simülasyonunu yapmakta yetersiz kalmasının yanında aşırı bilgisayar gücü gerektirir[1]. Sürekli zaman diferansiyel denklemleri ve bu modelin zamanda ayrıklaştırılmış ifadesi olan kesikli zaman fark denklemleri modelleri üretim-envanter sistemleri davranışının zaman içinde nasıl evrimleştiği hakkında bilgi vermesi ve kesikli olay simülasyonu modellerine göre daha az hesap gücü gerektirmesinden dolayı 1960 yıllarından bu yana kullanılan diğer bir modelleme türüdür. Gerçek zamanlı çözümler için yeterli olmasına rağmen, sistemde meydana gelen makina ve insan hataları, hazırlık süreleri ve üretimde meydana gelen duraksamaların modellenmesinde yetersizdirler. Kontrol mühendisliği disiplini ise fiziksel sistemlerin zaman cevabını veren diferansiyel denklem çözüm, araç ve yöntemlerini çatısı altında bulundurmasından ötürü, bu tür çalışmalara kontrol mühendisliği bakış açısıyla yaklaşılmıştır.
Envanter kontrol sistemlerine teoritik yaklaşımlar genel olarak iki farklı kategoride değerlendirilebilirler. Bunlar maliyet tabanlı olan ve maliyet tabanlı olmayan yaklaşımlardır. İlki optimal kontrol teorisini kullanarak envanterde oluşan elde bulundurma maliyeti ile üretim maliyeti arasında bir değiş tokuş dengesi oluşturarak ve talep tahmininde bulunarak çözüm bulmayı amaçlarken, maliyet tabanlı olmayan yaklaşımlar genellikle karmaşık olan üretim ve envanter maliyetleri ile ilgili detaylı bilgiye ihtiyaç duymazlar ve gerçek zamanda değişen talep değerlerine cevap vermede daha başarılıdırlar[4]. Bu çalışmada, üretim sistemlerinde imalat süreci, ürünlerin taşınması, karar aşaması gibi birçok sebepten meydana gelen ölü zaman model içine dahil edilmiş ve değişen ölü zaman değerlerinin
sistem kararlılığına etkisi incelenmiştir. Bu bildiride ele alınan envanter sistemi, daha önceki çalışmalarda da[6,7] sıklıkla incelenen, satış değerlerinden elde edilen öngörü ve gerçek zamandaki envanter seviyesiyle, kontrol yöntemleri aracılığıyla üretim planının belirlenmeye çalıışıldığı envanter seviyesini istenilen düzeyde tutmayı hedefleyen modeldir. Diğer çalışmaların aksine, ölü zaman, sistem dinamiğine daha gerçekçi bir yaklaşımda bulunabilmek için birinci dereceden eksponansiyel gecikme olarak ele alınmamış, saf ölü zaman olarak kabul edilmiştir. Bu çalışmada, Karakteristik Köklerin Yığınlı İşlenmesi (Cluster Treatment of Characteristic Roots-CTCR) ile Genişletilmiş Kronecker Toplama metodu (Extended Kronecker Summation Method (EKSM) envanterin kararlılığının incelenmesinde kullanılmıştır. Bu çalışmadaki amaç, envanter seviyesinin farklı gecikme değerleri için kararlığını incelemek, yani envanter düzeyinin salınım yapmasını[5] ve üretimde meydana gelebilecek kesintileri engellemektir. Teknik olarak sistemin zaman sabitlerinin imajiner eksen üzerinde bulunmamasını sağlamaktır.İkinci bölümde sürekli sistem modelleri kullanılarak genel bir envanter modeli örnek olarak verilmiştir. Üçüncü bölümde Genişletilmiş Kronecker Toplama Metodu ile ölü zamanlı bir sistemin nasıl analiz edildiği anlatılmıştır. Dördüncü bölümde ise ölü zamanlı sistemin analizi ve simülasyonu ve son bölümde de genel sonuçlar aktarılmıştır.
2. Modelleme ve Problemin Tanımlanması
Bu bölümde, ölü zaman içeren sürekli bir sistemin diferensiyel denklemler kullanılarak nasıl modellendiği, bu modelin çözümü için altyapı oluşturan Laplace dönüşümü ve kontrol mühendisliğinin temel kavramlarından biri olan sistem kararlılığına değinilmiştir.
En basit anlamıyla envanter, bir elektrik devresindeki kapasitör gibi enerji depolama birimi olarak düşünülebir. Nasıl ki bir elektrik devresinde akımla taşınan elektrik yükleri kapasitör üzerinde enerjinin artmasına ya da azalmasına sebep oluyorsa, aynı şekilde üretilen ürünlerin envantere girmesi stokların yükselmesine, gelen taleplere cevap vermek için envanterden çekilen ürünler ise stokların azalmasına yol açar. Yani, burada elektrik yükleri ürünlere, kapasitör de envantere denk düşmektedir. Envanter seviyesi, talep ve üretim arasındaki ilişki aşağıdaki denklemde verilmiştir:
(1)
(1) denkleminde sırasıyla üretim hızını, talebi ve stok seviyesini göstermektedir[3,4]. Stok seviyesinin zamana bağlı değişim oranı, üretim hızı ve talep arasındaki farka eşittir. Bu ifade ideal bir üretim sistemini temsil eder. zamanındaki bir talebin anında karşılandığını gösterir. Gerçekte ise üretim sisteminde insan hatası, makina bozulması gibi ve dahası karar sürecinde oluşan gecikmelere bağlı olarak talep anında karşılanamaz. Tüm bu etmenler model içine ölü zaman olarak dahil edilebilir.
(2)
değeri (2) denkleminde yukarıda sayılan sebeplerden kaynaklanan gecikmeyi temsil eder.
Laplace dönüşümü (1) ve (2) denklemleri gibi tanımlanmış doğrusal diferansiyel denklemlerin çözümünde büyük kolaylıklar sağlar. (3) numaralı denklemde tanımlanan Laplace dönüşümü diferansiyel ifadeleri basit cebrik ifadelere çevirerek analizi ve çözümü kolaylaştırır.
(3)
Diferansiyel denkleme Laplace dönüşümü uygulanarak sistemin karakteristik denklemi elde edilir. Karakteristik denklemin kökleri bize sistemin zaman sabitlerini verir. Zaman sabitlerine bakarak sistemin davranışı hakkında bilgi sahibi oluruz. Esasen kontrol mühendisliğinin temel gayelerinden biri, sistemin zaman sabitlerini, sistemin istenilen davranışını verecek şekilde seçilmesini sağlamaktır. Bir diğer önemli kriter ise sistemin kararlı davranmasıdır. Matematiksel olarak karakteristik denklemin tüm köklerinin reel kısmı negatif ise, bu sistem sınırlı bir girişe sınırlı bir çıkış verir. Envanter sistemine dönecek olursak, (2) denkleminin Laplace transformu aşağıdaki şekilde verilir;
(4)
(4) denkleminde envanter seviyesi kontrol edilmesi istenilen değişken ( ), üretim oranı da ( ), kontrol girişi olarak seçilirse, talep ve envanter seviyesi arasında girdi-çıktı ilişkisi kurulur[8]. Burada
vurgulanmak istenilen nokta ise ilişkinin nasıl kurulduğu değil, bu ilişkide ifadesinin yer almasıdır. Transandantal ifade sistemin doğrusallığını bozmaz, yalnız sisteme sonsuz sayıda kök(zaman sabiti) getirdiği için analizi zorlaştırır. Eğer sistem belirsiz parametreler de içeriyorsa, kararlılık analizi yapmak iyice güçleşir.
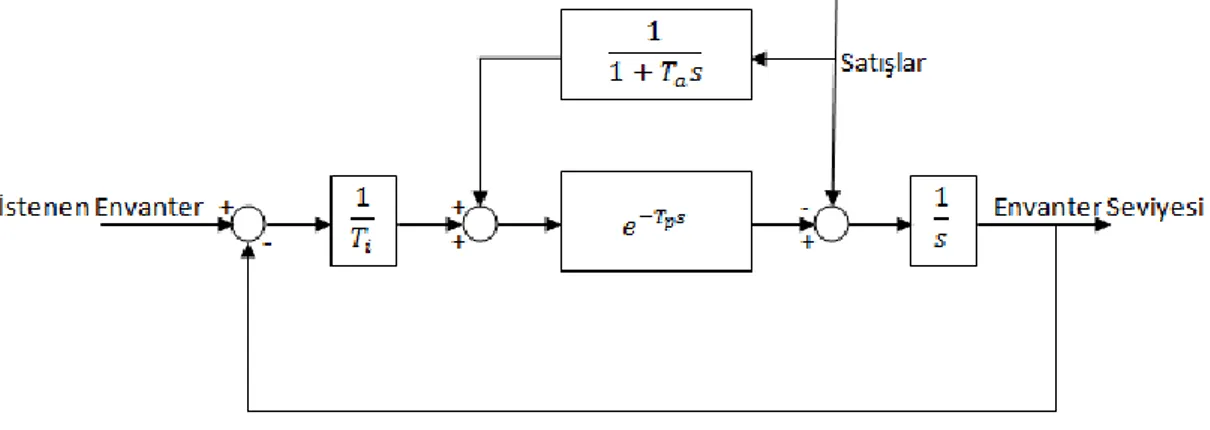
Şekil 1. Üretim-Envanter Sistemi Blok Diyagramı
Şekil 1’de daha önceki çalışmalarda da ele alınan[7], satış değerleri ve envanter seviyesine bakılarak üretim hızının kontrol edildiği sistemin blok diyagramı verilmiştir. , ve sırasıyla gerçek envanter seviyesini, istenilen envanter düzeyini ve satış oranı göstermek için kullanılacaktır. Satışlar envanter düzeyini düşürmek için sisteme bozucu etki olarak verilmekte ve aynı zamanda satış değerlerini tahmin etmek için kullanılmaktadır. Satışları tahmin etmek için üssel düzleme tahmin tekniği kullanılmıştır. parametresi satışların ne oranda filtre edileceğini belirler. Düşük bir değeri satış değerlerindeki küçük değişimleri de dikkate alırken, büyük bir değeri satışların ortalama değerini verir ve anlık değişimlerin etkisini azaltır. bir bakıma alçak frekansları geçiren filtre sabitidir. parametresi üretim esnasında meydana gelen gecikmeleri temsil eder. parametresi ise sistemin orantı kontrolörüdür. İstenilen envanter düzeyi ile gerçek envanter seviyesi karşılaştırılır ve 1/ oranında düzeltme yapılır, bu değere satışlardan tahmin edilen değer de eklenerek üretim miktarına karar verilir. 2 girişli 1 çıkışlı olan envanter sisteminin transfer fonksiyonu aşağıdaki denklemde verilmiştir.
(5) Transfer fonksiyonunda gecikme bloğunu, entegratör bloğunu, satış tahmin bloğunu ve parametresi ise kontrolörü göstermektedir. Blok içindeki ifadeler transfer fonksiyonunda yerine yazılır ve düzenlenirse,
(6)
ifadesi elde edilir. Bu denklemin ters Laplace dönüşümü bize belli bir referans değeri ve satış oranı sisteme girdi olarak verildiğinde, envanterin seviyesinin zaman bölgesindeki çözümünü verir. Daha önce de belirtildiği gibi sistemin zaman bölgesindeki çözümünü, karakteristik denklemin kökleri belirler. Transfer fonksiyonun paydası karakteristik denklemi verir. Bu denklemin kökleri sistemin kutupları, transfer fonksiyonun paydasının kökleri ise sistemin sıfırları olarak adlandırılır. Kutuplar sistemin zaman sabitlerini, sıfırlar ise zaman sabitlerinin sisteme ne oranda katkıda bulunacağını tayin eder. Ele alınan sistemin karakteristik denklemine bakacak olursak, envanterin davranışını belirleyen üç parametre vardır. ve parametreleri bizim tayin edebileceğimiz bağımsız parametrelerken, parametresi gecikmelerden dolayı karşımıza çıkan belirsiz bir parameterdir. Karakteristik denklem aşağıdaki şekilde hesaplanmıştır.
(7)
Bu çalışmadaki amaç sistemin kararlılığını farklı gecikme değerleri açısından incelemek ve envanter düzeyini istenilen seviyede tutmaktır. Bir sonraki bölümde ölü zamanlı ve belirsiz parametreli
sistemlerin analizine olanak veren Genişletilmiş Kronecker Toplama Metoduna değinilmiştir.
3. Genişletilmiş Kronecker Toplama Metodu
Genişletilmiş Kronecker Toplama Metodu, ölü zaman değerlerinin ve sistemde beliren parametrik belirsizliklerin bir fonksiyonu olarak kararlılığın bozulduğu noktaların (ς) belirlenmesini sağlayan Karakteristik Köklerin Yığınlı İşlenmesi metodu [9,10,11] içerisinde kullanılır. Metod esas olarak matrislerin Kronecker Toplama metodu ile işleme tabi tutulmasına dayanmaktadır. Üzerinde çalışılan sistem, doğrusal ve zamanla değişmeyen, çoklu zaman gecikmesine sahip olup ( linear time invariant, retarded multiple time delayed systems (LTI-MTDS), genel formu aşağıda verilmiştir.
(8)
Burada , , , düzleminde bulunan matrislerdir, ve zaman gecikmeleri vektörü ve elemanları birbirinden bağımsızdır. Çalışmanın geri kalanında vektör ve matrisler için kalın karakter kullanılmıştır. Çalışmada birim çemberin içi, birim çember ve birim çemberin dış kısmı sırası ile olarak gösterilmiştir.Bu sebeple, , tüm kompleks düzlemi ifade eder. Bu açıklamalardan sonra, kompleks düzlem sol ve sağ yarıdüzlem ve sanal eksen olmak üzere üçe ayrılabilir. (8) denkleminde belirtilen sistemin karakteristik denklemi:
(9)
burada , s düzleminde bulunan n. dereceden bir polinom, ise parametrik belirsizlikleri ve hariç tüm belirsizlikleri taşıyan s düzlemindeki bir sözde polinomdur (quasi-polynomial). , ölü zamanının ( ≤ ) dinamik yapısındaki en yüksek derecedir. en yüksek derecesi
1
n olan s terimlerini içerir ve bu terimler en yüksek uyumluluğa sahip ’ların üstel karşılıklarının çarpılması ile elde edilen faktörlerdir. Sistem (retarded type) ölü zamanlı olduğu için, ifadesi sadece gecikmelerden bağımsız olan içinde yeralır. ise ’den daha düşük uyumluluğa sahip ( ’ler için) terimleri içeren bir sözde polinomdur.
Tanım 1:(8) denkleminde belirtilen sistemin kararlılık durumu (9) denkleminin karakteristik köklerinin ’deki sayısına bağlıdır. Bu köklerin sayısı (8) denkleminin parametreleri olan ölü zamanlara ve parametrik belirsizliklere bağlı bir fonksiyondur. ’da kök bulunmazsa sistem kararlı durumdadır. Herhangi bir kararlılık değişimi durumunda üzerinde bir karakteristik kök i bulunmalıdır. Bu parametrik uzaydaki “kök devamlılığı”nın bir sonucudur [12, 13].
İki matrisin Kronecker toplamı [14, 15]’de verilmiştir. Kronecker toplamı, biri diğeri özdeğere sahip kare matrislerden, özdeğere sahip yeni bir matris oluşturur. Bu matrisin özdeğerleri, işleme tabi tutulan matrislerin özdeğerlerinin ikili kombinasyonlarının toplamıdır. Çalışmamızda, aşağıdaki tanımda da belirtildiği üzere, bu özelliğin avantajından yararlanılmıştır.
Tanım 2: (8) denkleminde belirtilen sistemin Yardımcı Karakteristik Denklem’i (YKD), olmak üzere [12] aşağıdaki gibi tanımlanmıştır:
(10)
Teorem 1: (8) denkleminde verilen sistem için aşağıdaki bulgular eşdeğerdir:
1. p-boyutlu bütünleşik kompleks sayılar , YKD’yi sağlar. 2. (9) denkleminde en azından bir çift sanal karakteristik kök (i) bulunmaktadır.
3. Buna karşılık olarak ’yı kapsayan bir gecikme vektörü ve bir parametre vektörü, bulunmaktadır.
(10) denklemi belirli bir için şartını sağlayan noktası için yeter ve gerek şarttır. ve ’ye bağlı bu fonksiyon gecikmelerden tamamen bağımsızdır, prosedür bu hali
ile belirli bir için (10) denkleminde için çözümü oldukça basitleştirmiştir. Sanal köklerinin bulunması için ve değerleri (9) denkleminde yerine yazılır ve s için çözülür. Bu kökler bizim aradığımız geçiş köklerinin frekansını verir ve aşağıdaki kümeyi oluştururlar;
(11)
Daha sonra hesaplanan s çözümleri gecikme değerlerinin bulunması için aşağıdaki denklemde yerine yazılır.
(12)
burada farklı k değerleri için j. gecikme olduğunu işaret eder.
4. Örnek Olay İncelemesi
Bu bölümde, öncelikle Genişletilmiş Kronecker Toplama Metodu envanter sistemine uygulanarak, sistemin parametreleri ve ölü zamanı arasındaki ilişkinin kararlılığına etkisi incelenmiştir. Ardından sistemin bir senaryo için simülasyonu yapılmış ve sonuçları tartışılmıştır.
(7)’de tanımlanan karakteristik denklemin durum uzayı gösterimi aşağıdaki şekildedir:
(13)
burada,
(14)
Karakteristik denklemde ifadesi yerine yazılır ve Tanım 2’de verilen (10) kullanılarak sistemin Yardımcı Karakteristik Denklemi elde edilir.
(15)
YKD’nin için çözümleri karakteristik denklemde yerine yazılır ve karakteristik denklemin için çözümü parametreler ile ölü zaman arasındaki ilişkiyi belirler.
Çıkan çözümlere bakıldığında, kararlılığının parametresinden bağımsız olduğu görülmüştür. Kontrolör parametresi ve ölü zaman arasında aşağıdaki ilişki bulumuştur.
(16)
(16)’daki eşitlik sağlandığında sistemin zaman sabitleri(Karakteristik denklemin kökleri) frekansından sağ yarı düzleme geçiş yaparlar ve kararsızlığa yol açarlar.
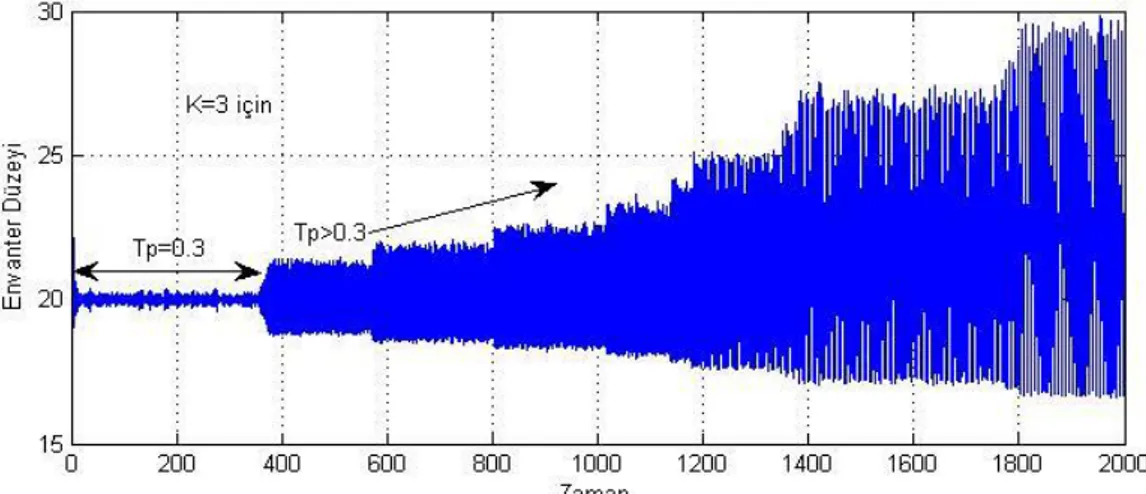
Talep oranının dağılımı şeklinde olduğu varsayılmış ve referans envanter değerinin 20 olarak verildiği bir durumun simülasyonu gerçekleştirilerek, Şekil 2 ve Şekil 3’teki sonuçlar elde edilmiştir. Simülasyon sonuçları Genişletilmiş Kronecker Toplama Metodundan elde edilen sonuçlarla tutarlılık göstermiştir.
5. Sonuçlar
Öncelikli olarak, sistem kararlıyken parametresinin değişiminin sisteme etkisi incelenmiş ve ’nın sistem kararlılığı üzerinde etkisi olmadığı gözlenmiştir. Bununla beraber büyük bir değerinin üretim hızında daha az dalgalanmaya yol açtığı belirlenmiştir. Bunun sebebi satış değerlerindeki ani değişimlerin etkisinin satış tahminine olan katkısının azlığıdır. Şekil 2 ve şekil 3’de sabit bir kazanç değeri için değişen ölü zaman değerlerinin sisteme etkisi gösterilmiştir. Zaman gecikmesinin (16)’da verilen eşitliği sağladığı noktada sistem kararsızlığa geçmiştir; envanter seviyesi osilasyon yapmaya
başlamış ve üretimde sistem frekansına bağlı olarak durmalar meydana gelmiştir. değeri kararsızlık noktasından sonra daha da arttırıldığı zaman, üretimdeki duraksamaların süresi artmış ve ortalama envanter değerinde artış gözlemlenmiştir.
Şekil 2. Artan Ölü Zaman Değerine Bağlı Envanter Düzeyi
Şekil 3. Artan Ölü Zaman Değerine Bağlı Üretim Oranı
Kaynaklar
[1] Riddalls, C., and Bennett, S., 2000. “Modelling the dynamics of supply chains”. International Journal of Systems Science, 31(8), pp. 969–976.
[2] Ortega, M., and Lin, L., 2004. “Control theory application to the production-inventory problem: a review”. Internation Journal of Production Research, 42(11), pp. 2303-2322
[3] Sipahi, R., and Delice, I. I., 2010. “Stability of inventory dynamics in supply chains with three delays”. Internation Journal of Production Economics, 123(1), pp. 107–117.
[4] Riddalls, C., and Bennett, S., 2002. “Production-inventory system controller design and supply chain dynamics”. International Journal of System Science, 33(3), pp. 181–195.
[5] Riddalls, C., and Bennett, S., 2002. “The stability of supply chains”. International Journal of Production Research, 40(2), pp. 459–475. cited By (since 1996) 36.
[6] Wikner, J., 1994. Dynamic Modelling and Analysis of Information Flows in Production-Inventory and Supply Chain Systems. Linköping: Linköping Institute of Technology
[7] White, A. S., 1999, “Management of inventory using control theory”. International Journal of Technology Management, 17, pp. 847-860.
[8] Towill, D., 1982. “Dynamic analysis of an inventory and order based production control system”. International Journal of Production Research, 20, pp. 671–687.
[9] Olgac, N., and Sipahi, R., 2002. “An exact method for the stability analysis of time-delayed linear time-invariant (lti) systems”. IEEE Transactions on Automatic Control, 47(5), pp. 793–797. cited By (since 1996) 163.
[10] Olgac, N., Ergenc, A. F., and Sipahi, R., 2005. “Delay scheduling: A new concept for stabilization in multiple delay systems”. Journal of Vibration and Control, 11(9), pp. 1159–1172.
[11] Ergenc, A. F., Olgac, N., and Fazelinia, H., 2007. “Extended kronecker summation for cluster treatment of lti systems with multiple delays”. SIAM Journal of Control and Optimization, 46, pp. 143–155.
[12] Hale, J. K., 1977. Theory of Functional Differential Equations. Springer-Verlag, New York.
[13] Hale, J. K., and Lunel, S. M. V., 1993. An Introduction to FunctionalDifferential Equations. Springer-Verlag, New York.
[14] Bernstein, D. S., 2005. Matrix Mathematics. Princeton University Press.
[15] Brewer, J. W., 1978. “Kronecker products and matrix calculus in system theory”. IEEE Transactions on Circuits and Systems, CAS-25, pp. 772–781.