T.C.
SELÇUK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
ĠKĠ BOYUTLU SPLĠNE FONKSĠYONLARI
Oğuzer SİNAN
DOKTORA TEZİ
MATEMATİK ANABİLİM DALI Konya, 2008
T.C.
SELÇUK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
ĠKĠ BOYUTLU SPLĠNE FONKSĠYONLARI
Oğuzer SİNAN
DOKTORA TEZİ
MATEMATİK ANABİLİM DALI
Bu tez 17/12/2008 tarihinde aşağıdaki jüri tarafından oybirliği/oyçokluğu ile kabul edilmiştir.
Prof. Dr. Şaziye YÜKSEL Prof. Dr. Dursun TAŞCI Prof. Dr. Haydar BULGAK
(üye) (üye) (danışman)
Doç. Dr. Kemal AYDIN Yrd. Doç. Dr. Ayşe Dilek GÜNGÖR
ÖZET
Doktora Tezi
ĠKĠ BOYUTLU SPLĠNE FONKSĠYONLARI
Oğuzer SİNAN Selçuk Üniversitesi Fen Bilimleri Enstitüsü Matematik Anabilim Dalı Danışman: Prof. Dr. Haydar Bulgak
2008, 43 + vii sayfa
Jüri: Prof. Dr. Şaziye YÜKSEL
Prof. Dr. Dursun TAŞCI Prof. Dr. Haydar BULGAK Doç. Dr. Kemal AYDIN
Yrd. Doç. Dr. Ayşe Dilek GÜNGÖR
İki boyutlu Spline fonksiyonlar uygulamalı matematikte ve matematiğin bilgisayar uygulamalarında önemlidir. Yüzey oluşturmada ve yüzey üzerinde yaklaşık değer aramada yaklaşımlar ortaya koyar.
Selçuk Üniversitesi Uygulamalı Matematik Araştırma Merkezinde “Graphics Constructor” ve bilgisayar diyalog programları geliştirildi. Bu programlar fonksiyon grafiklerinin görüntülenmesinde tek boyutlu spline fonksiyonlar kullandılar. Bu çalışma t- hiperbolik kısmi diferansiyel denklemlerin Cauchy probleminin çözümünü grafiksel gösterimi için geliştirilmiştir.
Bu çalışmanın sonuçlarına dayanarak bir bilgisayar programı yazıldı.
ANAHTAR KELĠMELER: Spline fonksiyonlar, İki boyutlu spline, Kısmi diferensiyel denklemler, Cauchy problemi, t-hiperbolik denklemler
ABSTRACT
PhD Thesis
TWO DIMENSIONAL SPLINE FUNCTIONS Oguzer SINAN
Selçuk University
Graduate School of Natural and Applied Sciences Department of Mathematics
Supervisor : Prof. Dr. Haydar Bulgak 2008, 43 + vii page
Jury: Prof. Dr. Şaziye YÜKSEL
Prof. Dr. Dursun TAŞCI Prof. Dr. Haydar BULGAK Doç. Dr. Kemal AYDIN
Yrd. Doç. Dr. Ayşe Dilek GÜNGÖR
Two dimensional spline functions are important for mathematics and computer application of mathematics. It suggests approaches for forming surface and searching approximate value on the surface.
“Graphics Constructor” and “Cauchy Solver” computer dialog programs were created in the Selcuk Universty Reearch Center of Aplied Mathematics. These programs use the one dimensional spline functions for visualisation of the function graphics. The study generalises this approach to the Cauchy problem for t-hyperbolic partial differential equations.
The results of the thesis are realised in one computer program.
KEY WORDS: Spline-functions, Two dimensional splines, partial differential equations, Cauchy problem, t-hyperbolic equations
ÖNSÖZ
Bu çalışmasının her aşamasında büyük sabır ve titizlik gösteren ve yardımlarını esirgemeyen danışmanım Sayın Prof. Dr. Haydar BULGAK‟ a, çalışma süresince her konuda bana destek olan Doç. Dr. Kemal AYDIN ve Öğr. Gör. Dr. Ayşe BULGAK‟ a, değerli katkılarını gördüğüm tez izleme komitesi üyeleri Prof. Dr. Şaziye YÜKSEL ve Prof. Dr. Dursun TAŞCI‟ ya, manevi desteğini her zaman hissettiğim Prof. Dr. Ali A. SİNAN‟ a teşekkür ederim.
Bu çalışmanın hazırlanmasında her zaman bana desteklerini sunan aileme ve dostlarıma teşekkürü bir borç bilirim.
ĠÇĠNDEKĠLER ÖZET ………..…….………..iii ABSTRACT ……….……...…………..iv ÖNSÖZ ………...………....v ĠÇĠNDEKĠLER………..vi 1. GĠRĠġ ……….………..……..….1
2. TEZĠN AMACI VE YAPISI……….4
3. BĠRĠNCĠ MERTEBEDEN HOMOJEN LĠNEER SABĠT KATSAYILI t- HĠPERBOLĠK DENKLEMĠ……….….7
4. BAZI ENTERPOLASYON POLĠNOMLARI……...……….…………..12
4.1. Lagrange Enterpolasyon Polinomu………..…...12
4.2. Üçüncü Dereceden Spline Fonksiyonu………..….13
4.3. Bir Algoritma………..………....14
4.4. Algoritma İçin Yordam………..…….…….…………..……….15
5. ĠKĠ BOYUTLU ENTERPOLASYON…….….…………...…….……….17
5.1. Problemin Tanımı………...…..……..17
6. ĠKĠ BOYUTLU ENTERPOLASYON PROBLEMĠNDE KÜBĠK
SPLĠNE FONKSĠYONLARININ KULLANILMASI …..….……..…20
6.1. Başlangıç Verilerinin Tanımlanması………..……….……….…..20
6.2. Spline Fonksiyonlara Ait Noktaların Üç Boyutlu Koordinat Sistemine Yerleştirilmesi………....22
6.3. Türev Değerleriyle İlgili Kararlar………….………...24
6. 4. İki Boyutlu Spline Fonksiyonun Bir Noktadaki Değerinin Hesaplanması.…27 7. KISMĠTÜREVLĠ DĠFERENSĠYEL DENKLEME BAĞLI OLARAK IZGARA VE SPLĠNE EĞRĠLERĠ………..…....….….…………..30
7.1. Başlangıç Verilerinin Tanımlanması………..…30
7.2. Izgara Tanımı………..……..………….………31
8. DEĞERLENDĠRME ve SONUÇ ………36
9. KAYNAKLAR ………..…..………...38
EKLER………...………40
EK-A. GENEL ÇĠZĠM YÖNTEMLERĠ………..………..………..40
1.GĠRĠġ
Spline kelimesinden, An Introduction To Splines for use in Computer Graphis & Geometric Modeling isimli (Bartels ve ark. 1987) kitabın Forrest R. tarafından yazılan önsözünde şu şekilde söz etmektedir;
“Gemi ve hava araçlarının tasarımında karmaşık eğrilerin ve şekillerin oluşturulması her zaman problem olarak görülmüştü. Geleneksel olarak, araçlar büyük çatı arası boşluklarda (loft), gerçek ölçülerde tasarlanırdı. Bu aşama (lofting) olarak adlandırılırdı. Eğriler, ağaçtan veya metalden yapılmış ince çıta ve benzeri, mekanik araç gereç kullanılarak oluşturulurdu. 1940‟lı yıllarda ilk matematiksel yöntemler geliştirilerek özellikle konik parçaların tarımında başarıyla kullanıldı. Bu yıllarda matematiksel spline fikri Schoenberg tarafından tanıtıldı”.
Kısmi diferensiyel denklemler teorisinde yer alan problemlerde çözümü grafiksel olarak göstermek matematiğin klasik olan problemlerden birisidir. Çoğu kitapların kapağında, böyle grafiklerin yerleştirilmesi bunun bir göstergesidir, örneğin (Ganzha ve Vorozhtsov 1996). Ayrıca bu gibi grafikleri bilgisayarlar yardımıyla göstermek son elli senedir gündemde olan bir konudur.
Bilgisayar cebir sistemleri (Computer Algebra Systems(CAS)) olarak isimlendirilen, MAPLE, MATHEMATICA, MATLAB gibi yazılımlar, iki boyutlu spline hesaplamalarını ve görüntü oluşturma işlemini yetenekli bir şekilde yapmaktadırlar.
Chibisov, Ganzha ve Zenger (2003), “Object oriented finite element calculation using Maple” isimli makalede, problemin çözümününe ait grafikler göstermek için Maple yazılımı kullanılır. Maple yardımıyla yüzeylerin görüntüleri bilgisayar grafiği olarak oluşturulur.
Ganzha ve arkadaşları (2002) “Support operator method for Laplace equation on unstructured triangular grid” isimli makalede problemin çözümüne yönelik görüntüleme teknikleri uyguladılar. Burada Laplace denklemi için, bir bölge üzerinde farklı çözümlerin gösterilmesi söz konusudur. Verilen bölge üzerinde ızgara (grid) seçiminin önemi tartışılır.
Huckle ve Stadaucher (2002) “A new order preconditioner for high resolution image reconstruction with multisensors.” isimli makalede yüksek çözünürlüklü imajı oluşturan noktalar ele alınır. Bu makalede imajın yeniden boyutlandırılması sırasında oluşan bozukluklar incelenir. Bu problemin çözümü için CG (Conjugate Gradient) tipi bir algoritma kullanılır.
Liska, Shashkov ve Swartz (2002) “Locally exact smooth reconstruction of lines, circles, planes, cylinders and cones by blending successive circular interpolants” isimli makalede üç boyutlu uzayda belirli enterpolasyon işlemlerle katı cisimler oluşturmayı tartışırlar.
İki boyutlu spline fonksiyonlar uygulamalı matematikte ve matematiğin bilgisayar uygulamalarında önemlidir. Yüzey oluşturmada ve yüzey üzerinde yaklaşık değer aramada yaklaşımlar ortaya koyar.
Selçuk Üniversitesi Uygulamalı Matematik Araştırma Merkezinde tek boyutlu spline fonksiyonlar için Bulgak ve Eminov (2003) tarafından “Graphics Constructor” bilgisayar interaktif yazılımı hazırlanmıştır. Bu bilgisayar programı; birinci, ikinci ve üçüncü dereceden tek boyutlu spline fonksiyonlarını grafiksel olarak göstermeye imkân sağlamıştır. “Graphics Constructor” programın dayandığı algoritmalar, Bulgak ve Eminov‟un (2003) çalışmalarında, bir Cauchy problemine uygulandı ve “Cauchy Solver” yazılımı ortaya konuldu. 𝑡0 , 𝑡1 ∈ 𝑅, 𝐴 karesel 𝑁
boyutlu reel matris, 𝑦0 reel 𝑁 boyutlu vektör olmak üzere,
𝑦′ 𝑡 = 𝐴𝑦 𝑡 , 𝑡
0 ≤ 𝑡 ≤ 𝑡1; 𝑦 𝑡0 = 𝑦0; (1.1)
bahsi edilen Cauchy problemidir. “Cauchy Solver” bilgisayar programı, (1.1) ile verilen Cauchy problemini çözüyor ve elde edilen yaklaşık çözümün her bir bileşenini tek boyutlu kübik spline fonksiyonlarının grafikleri olarak gösteriyor.
Bu konudaki birikime dayanarak benzer programları ve onların temelinde yatan algoritmaları geliştirmek amacıyla iki boyutlu spline fonksiyonlar bu çalışmada ele alınmıştır. Çalışmanın sonucunda konuyla ilgili algoritmalar ve görsel yaklaşımı gerçekleştiren bir bilgisayar yazılımı hazırlanmıştır.
Çalışma birinci mertebeden homojen lineer sabit katsayılı t-hiperbolik denkleme ait bir Cauchy probleminin çözümünü, iki boyutlu spline fonksiyonları kullanarak görüntülenmesine yönelik yapılmıştır.
Birinci mertebeden lineer homojen sabit katsayılı t-hiperbolik kısmi türevli diferensiyel denklemi, 𝑡, 𝑥 iki bağımsız değişken reel sayıları tararken bir reel 𝑎
sayısı için,
𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0
şeklinde olduğu bilinmektedir (Godunov 1979).
Bu probleme bağlı olan Cauchy problemi ele alalım. 𝑎, 𝛼, 𝛽 𝑣𝑒 𝑇 > 0 reel sayılar;
𝐺 = { 𝑡, 𝑥 ; 𝑎𝑡 + 𝛼 ≤ 𝑥 ≤ 𝑎𝑡 + 𝛽, 0 ≤ 𝑡 ≤ 𝑇} şeklinde tanımlı bir paralelkenar;
: [𝛼, 𝛽] → 𝑅 türetilebilen bir reel fonksiyon olmak üzere 𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0 , 𝑡, 𝑥 ∈ 𝐺
𝑢 0, 𝑥 = 𝜑 𝑥 , 𝛼 ≤ 𝑥 ≤ 𝛽
Bu problemin çözümünün var ve tek olduğu bilinmektedir (Godunov 1979). Çalışmanın amacı belirtilen 𝐺 bölgesinde çözümü grafiksel olarak göstermektir.
2. TEZĠN AMACI VE YAPISI
𝛼, 𝛽 ∈ 𝑅, 𝜑: [𝛼, 𝛽] → 𝑅 türetilebilen fonksiyonlar için 𝑎 reel sayı, 𝐺 = { 𝑡, 𝑥 ; 𝑎𝑡 + 𝛼 ≤ 𝑥 ≤ 𝑎𝑡 + 𝛽, 0 ≤ 𝑡 ≤ 𝑇} olmak üzere;
𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝐺 𝑢 0, 𝑥 = 𝜑 𝑥 ; 𝑥 ∈ [𝛼, 𝛽]
bir Cauchy problemini ele alalım. Bu problemin çözümünün verilen 𝐺 bölgesinde var ve tek olduğu bilinmektedir. Tezin amacı bu problemin bir yaklaşık çözümünü grafiksel göstermektir. Bu amaca ulaşabilmek için aşağıda belirtilen soruların cevaplarını vermeliyiz.
1. 𝜑 fonksiyonu nasıl tanıtılabilir? 2. Tanım bölgesi nasıl gösterilebilir?
3. Tanım bölgesiyle birlikte çözümü oluşturan fonksiyon, üç boyutlu olarak nasıl gösterilebilir?
Birinci soruya verilebilecek değişik cevaplar vardır. Örneğin bir fonksiyonlar bankası oluşturulabilir. Bu çalışmada, birinci soruya cevap; 𝜑 fonksiyonu yerine onun bir yaklaşımı olan özel üçüncü dereceden spline fonksiyonu alınmasıdır. Burada, Bulgak ve Eminov (2003) un “Graphics Constructor 2.0” isimli çalışmasında ortaya konulan üçüncü dereceden spline fonksiyonların hesaplanmasına ait formüller kullanıldı.
İkinci soruya cevabı ise Şekil 2.1 de gösterilen bir Dekart koordinat sistemine bağlı olarak gösterebiliriz. 𝑡𝑂𝑥 koordinat sistemi üzerinde bir paralelkenar tanım bölgesini oluşturmaktadır.
Üçüncü soruya cevap vermek için üç boyutlu Dekart koordinat sistemi Şekil 2.2 de gösterildiği gibi seçilmiştir. 𝑡𝑂𝑥 düzlemi üzerinde tanım bölgesinin bir paralelkenar şeklinde verilmesiyle, bölge üzerinde 𝜑 fonksiyonuna ait tablo değerlerden oluşan veriler yüzeyi oluşturacak spline fonksiyonların hesaplanmasını sağlar.
Bu temel üç soruya verilen cevaplara bağlı olarak çalışmanın yapısı oluşturuldu.
Bölüm 3 te genel olarak t-hiperbolik denklem ele alındı. Denklemle bağlı olan karakteristikleri ve bunlara dayanarak problemin genel çözümü hatırlatıldı. Bu bilgilere dayanarak Cauchy problemin çözümü hatırlatıldı.
Bölüm 4 de birinci soruya bağlı olarak tek boyutlu spline fonksiyonlar hatırlatıldı.
Bölüm 5 de iki boyutlu enterpolasyon problemi ile ilgili literatür taraması verildi.
Bölüm 6 da iki boyutlu spline fonksiyonlarının oluşturulması için gerekli işlemler gösterildi. Ω ∈ 𝑅2 bölgesi üzerinde bir ızgara 𝛺
ı𝑧𝑔 olsun. Izgarayı 𝛀 𝝎 ġekil 2. 3 ġekil 2. 1 𝑥 0 𝑡 𝑥 𝑡 𝑢 ġekil 2. 2
oluşturan düğüm noktaları ile sınırlanan herhangi bir bölge 𝜔 olmak üzere, 𝛺ı𝑧𝑔 üzerinde tanımlı reel değerli fonksiyonlara dayanarak,
𝑔: 𝛺ı𝑧𝑔 → 𝑅; 𝑣𝑒 𝑓: 𝛺 → 𝑅 olmak üzere, enterpolasyon fonksiyonu
∀ 𝑧 ∈ 𝛺ı𝑧𝑔 ; 𝑓 𝑧 = 𝑔 𝑧
olacak şekilde 𝑓: 𝜔 → 𝑅 fonksiyonlarının hesaplanması anlatıldı (Şekil 2.3).
Bölüm 7 de kısmi türevli diferensiyel denklemin verilen sınırlar çerçevesinde oluşan çözüm bölgesi üzerinde özel ızgaranın kurulması ve başlangıç koşulunu teşkil eden 𝜑 fonksiyonu için düğüm değerlerine bağlı spline fonksiyonun oluşturulması anlatıldı.
Bölüm 8 de çalışmanın değerlendirilmesi yapılarak, gelecekte yapılması amaçlanan çalışmalar hakkında kısa açıklamalar verildi. 𝐸𝑉𝐷 ( Özdeğer Ayrışımı) ye dayanarak matris-vektör şeklinde verilen t-hiberbolik denklemlerin (onların bir çeşidi olan akustik denklemler de içine alan) çözümüne bağlı olarak araştırma hedefimizi açıkladık.
Çalışmanın sonunda bir ek verilmiştir. Ek olarak verilen bölüm, (𝑡, 𝑥, 𝑢) üç boyutlu koordinat sisteminde 𝐺 çözüm bölgesi üzerinde oluşan spline fonksiyonlara ait noktaların iki boyutlu bir düzlem üzerine izlerinin düşürülmesi ile ilgili işlemler verildi. Söz konusu iki boyutlu düzlem genellikle bilgisayar ekranı gibi bir görüntüleme cihazı olacaktır.
3. BĠRĠNCĠ MERTEBEDEN HOMOJEN LĠNEER SABĠT KATSAYILI t-HĠPERBOLĠK DENKLEMĠ
𝑎 bir reel sayı olmak üzere,
𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 (3.1)
lineer sabit katsayılı homojen kısmi türevli diferensiyel denklemi ele alalım. Kaynaklarda bu denklem t-hiperbolik denklemi olarak bilinmektedir, örneğin Godunov (1976 ve 1979) bu tip denklemlerden söz etmiştir. Bu kaynaklara dayanarak bu denklemle ilgili bazı temel bilgileri verelim.
𝑑𝑡 𝑡 = 𝑑𝑥 𝑎 , 𝑎 ≠ 0 şartını sağlayan 𝑥 − 𝑎𝑡 = 𝑐 ; 𝑡, 𝑐 ∈ 𝑅
doğruların kümesine (3.1) denkleminin karakteristiklerin kümesi denir. Bu kümenin her bir elemanına, (3.1) denkleminin karakteristiği denir. Birkaç örnekle tanımlanan kavramı açıklayalım.
Örnek 3.1.
𝑢 𝑡 𝑡, 𝑥 + 𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin üç farklı karakteristiğini
grafiksel olarak gösterelim.
Verilen denklemi (3.1) denklemiyle kıyaslarsak 𝑎 = 1 dir ve dolayısıyla 𝑥 − 𝑡 = 𝑐; 𝑡, 𝑐 ∈ 𝑅 karakteristiklerin kümesidir. 𝑐 = 0 için 𝑥 − 𝑡 = 0 , 𝑡 ∈ 𝑅 doğrunun grafiğini (0,0) noktadan geçen doğru olarak Şekil 3.1 de gösterdik. Açıktır ki 𝑐 = 1 ve 𝑐 = −1 parametrelerine karşılık gelen iki karakteristikler de (0,1) ve (0, −1) noktalardan geçen ve ilk doğruya paralel olan doğrulardır.
Örnek 3.2.
𝑢 𝑡 𝑡, 𝑥 + 3𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin üç farklı karakteristiğini grafiksel olarak gösterelim. Bu denklemi, (3.1) denklemi ile kıyaslarsak 𝑎 =3 dür.
Bu durumda 𝑥 − 3𝑡 = 𝑐 , 𝑡, 𝑐 ∈ 𝑅 karakteristiklerin kümesidir. 𝑐 = 0 için 𝑥 − 3𝑡 = 0 , 𝑡 ∈ 𝑅 doğrusunun grafiğini (0,0) noktadan geçen doğru olarak Şekil
3.2 de gösterdik. Bu doğruya paralel olan iki farklı doğruda, Şekil 3.3 deki gibi elde edilir.
Literatürde iyi bilinen bir teorem verelim. Örneğin Godunov (1979) a bakınız.
Teorem 3.1.
𝑎 bir reel sayı ve 𝑓: 𝑅 → 𝑅 ye türetilebilen fonksiyon olmak üzere 𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin genel çözümü 𝑥 = 𝑎𝑡 + 𝑐 𝑥 𝑡 0 ġekil 3. 4 𝑥 = 3𝑡 𝑥 𝑡 1 3 1 0 ġekil 3. 2 𝑥 𝑡 1 3 1 0 ġekil 3. 3 𝑥 𝑡 1 1 0 ġekil 3. 1
𝑢 𝑡, 𝑥 = 𝑓 𝑥 − 𝑎𝑡 , 𝑡, 𝑥 ∈ 𝑅 (3.2) şeklindedir.
Bu teorem gereği ve
𝑑𝑢 (𝑡, 𝑐 − 𝑎𝑡)
𝑑𝑡 = 0 , 𝑡 ∈ 𝑅
olduğundan verilen denklemin çözümü keyfi bir c ile tanımlanan 𝑥 − 𝑎𝑡 = 𝑐 , 𝑡 ∈ 𝑅 karakteristik üzerinde sabittir. 𝑎 > 0 için bir karakteristiği Şekil 3.4 de verildi.
Örnek 3. 3.
𝑢 𝑡 𝑡, 𝑥 − 5𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin genel çözümünü bulalım.
Burada 𝑥 + 5𝑡 = 𝑐; 𝑡, 𝑐 ∈ 𝑅 denklemin karakteristikleridir. Dolayısıyla 𝑓: 𝑅 → 𝑅 bir türetilebilen fonksiyon ise
𝑢 𝑡, 𝑥 = 𝑓 𝑥 + 5𝑡 , 𝑡, 𝑥 ∈ 𝑅 istenilen genel çözümüdür.
Örnek 3. 4.
𝑢 𝑡 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin genel çözümünü bulalım.
Burada 𝑓 𝑥 = 0; 𝑡, 𝑐 ∈ 𝑅 denklemin karakteristikleridir. Dolayısıyla 𝑓: 𝑅 → 𝑅 bir fonksiyon ise,
𝑢 𝑡, 𝑥 = 𝑓 𝑥 , 𝑡, 𝑥 ∈ 𝑅 istenilen genel çözümüdür.
Bu örnek bize gösteriyor ki 𝑎 = 0 ise genel çözümü tanımlayan fonksiyonun türetilebilme şartı aranmaz.
Örnek 3. 5.
𝑢 𝑡 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin genel üç farklı çözümünü yazalım. 𝑢 1 𝑡, 𝑥 = 𝑥2+ 5,
𝑢 2 𝑡, 𝑥 = 𝑥 − 3 ,
𝑢 3 𝑡, 𝑥 = 𝑥 sin 𝑥 + 7 .
Örnek 3. 6.
𝑢 𝑡 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅 denkleminin üç farklı karakteristiğini grafiksel olarak Şekil 3.6 ile gösterelim.
Literatürde iyi bilinen bir teoremi verelim. Örneğin Godunov (1976 ve 1979) a bakınız.
Teorem 3. 2.
𝜑: 𝑅 → 𝑅 türetilebilen bir fonksiyon ve 𝑎 ≠ 0 verilen bir sabit olmak üzere, 𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝑅
𝑢 0, 𝑥 = 𝜑 𝑥 ; 𝑥 ∈ 𝑅 Cauchy probleminin çözümü vardır ve tektir.
Açıktır ki bu çözüm 𝑢 𝑡, 𝑥 = 𝜑(𝑥 − 𝑎𝑡) dir.
𝑎, 𝛼, 𝛽, 𝑇 > 0 reel sayılar 𝜑: [𝛼, 𝛽] → 𝑅 türetilebilen fonksiyonlar için, 𝐺 = { 𝑡, 𝑥 ; 𝑎𝑡 + 𝛼 ≤ 𝑥 ≤ 𝑎𝑡 + 𝛽, 0 ≤ 𝑡 ≤ 𝑇} Bu taktirde; 𝑥 − 𝑎𝑡 = 𝛽 𝑥 − 𝑎𝑡 = 𝛼 𝛽 𝛼 𝑥 0 𝑇 𝑡
𝐺
𝑥 𝑡 3 0 ġekil 3. 5 0 𝑥 𝑡 ġekil 3. 6 ġekil 3. 7𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0; (𝑡, 𝑥) ∈ 𝐺
𝑢 0, 𝑥 = 𝜑 𝑥 , 𝑥 ∈ [𝛼, 𝛽] (3.3) Cauchy probleminin çözümü var, tek ve 𝑢 𝑡, 𝑥 = 𝜑 𝑥 − 𝑎𝑡 , 𝑡, 𝑥 ∈ 𝐺 dir.
SONUÇ: Bir t-hiperbolik denklemi için Cauchy problemin çözümü var ve tektir. Eğer veriler 𝑡 = 0 olmak üzere bir sonlu aralıkta verildi ise çözüm de tek olarak bir bant üzerinde tanıtılır. Çözüm 𝑡 = 𝑇‟ye kadar isteniliyorsa çözüm bölgesi de bir paralelkenardır. Örneğin 𝑎 > 0 için çözüm bölgesi Şekil 3. 7 de gösterildi.
4. BAZI ENTERPOLASYON FONKSĠYONLARI
Bulgak ve Eminov (2003) yayınladıkları “Graphics Constructor 2.0” isimli makalede, tablo değerlere dayanarak Lagrange enterpolasyon polinomu ile birlikte, birinci dereceden, ikinci dereceden ve üçüncü dereceden tek boyutlu spline fonksiyonları tanıtmışlardır. Bu çalışmada, üçüncü dereceden spline fonksiyonlar, düğüm noktalarındaki türev değerlerinin serbest seçilebilmesi yönüyle, Cauchy probleminin çözümünde önemli olduğu için tercih edilmiştir.
4.1. Lagrange Enterpolasyon Polinomu
𝑋 𝑥0 𝑥1 𝑥2 … 𝑥𝑛−1
𝑌 𝑦0 𝑦1 𝑦2 … 𝑦𝑛−1
Tablo 4. 1
Eğer tablo 4.1 için 𝑥0, 𝑥1, 𝑥2, … , 𝑥𝑛−1 ayrık noktalarda tablolu fonksiyonun değerleri 𝑦0, 𝑦1, 𝑦2, … , 𝑦𝑛−1 ise bu takdirde 𝑥𝑘, 𝑦𝑘 , 𝑘 = 0,1, … , 𝑛 − 1 noktalarından geçen 𝑚 ≤ 𝑛 − 1 dereceli tek bir enterpolasyon polinomu vardır (Aydın ve ark. 2003, Bulgak ve Eminov 2003). Belirtilen enterpolasyon polinomu
𝐿𝑖 𝑥 = 𝑥 − 𝑥𝑘 𝑥𝑖 − 𝑥𝑘 𝑛−1 𝑘=0,𝑘≠𝑖 olmak üzere 𝑝 𝑥 = 𝑦𝑖 𝑛−1 𝑖=0 𝐿𝑖(𝑥)
olarak yazılır. 𝑝(𝑥) polinomunun buradaki gösterilişine Lagrange enterpolasyon polinomu denir (Aydın ve ark. 2003, Bulgak ve Eminov 2003). Bu polinomun ikinci bir yazılış şekli;
dir. Bu gösterime Newton enterpolasyon polinomu denir (Aydın ve ark. 2003, Bulgak ve Eminov 2003).
4.2. Üçüncü Dereceden Spline Fonksiyonu (kübik spline)
Tablo 4.1‟ e reel sayı dizisi 𝐹0, 𝐹1, … , 𝐹𝑛−1 eklenerek elde edilen Tablo 4.2 ye göre,
𝑋 𝑥0 𝑥1 𝑥2 … 𝑥𝑛−1
𝑌 𝑦0 𝑦1 𝑦2 … 𝑦𝑛−1
𝐹 𝐹0 𝐹1 𝐹2 … 𝐹𝑛−1
Tablo 4. 2
bir kübik spline 𝑦 = (𝑥) ∈ 𝐶1 𝑥0, 𝑥𝑛−1 , tablo 4.2 yi ve ′ 𝑥𝑗 = 𝐹𝑗, 𝑗 = 0,1, … , 𝑛 − 1 şartını sağlayan yegane fonksiyondur (Aydın ve ark. 2003, Bulgak ve Eminov 2003). (𝑥) fonksiyonu, 𝑤𝑖 = 1 𝑥𝑖 − 𝑥𝑖−1 𝑦𝑖− 𝑦𝑖−1 𝑥𝑖 − 𝑥𝑖−1− 𝐹𝑖−1 , 𝑖 = 1,2,3, … , 𝑛 − 1 𝑎𝑖 = 1 𝑥𝑖 − 𝑥𝑖−1 𝐹𝑖 − 𝐹𝑖−1 𝑥𝑖 − 𝑥𝑖−1 − 2𝑤𝑖 𝑏𝑖 = − 𝑥𝑖 + 2𝑥𝑖−1 𝑎𝑖 + 𝑤𝑖 𝑐𝑖 = 𝐹𝑖−1− 3𝑎𝑖𝑥𝑖−12 − 2𝑏 𝑖𝑥𝑖−1 𝑑𝑖 = 𝑦𝑖−1− 𝑎𝑖𝑥𝑖−13 − 𝑏𝑖𝑥𝑖−12 − 𝑐𝑖𝑥𝑖−1 olmak üzere, 𝑥 = 𝑎𝑖𝑥3+ 𝑏 𝑖𝑥2+ 𝑐𝑖𝑥 + 𝑑𝑖; 𝑥𝑖−1 ≤ 𝑥 < 𝑥𝑖 , 𝑖 = 1,2,3, … , 𝑛 − 1
şeklinde tanımlanır (Aydın ve ark. 2003, Bulgak ve Eminov 2003).
(𝑥) fonksiyonun özelliği, 𝑥𝑖−1 ≤ 𝑥 < 𝑥𝑖 aralığında üçüncü dereceden polinomun,
𝑥𝑖−1 = 𝑦𝑖−1;
𝑑
𝑑𝑥 𝑥𝑖−1 = 𝐹𝑖−1; 𝑥𝑖 = 𝑦𝑖; 𝑑
𝑑𝑥 𝑥𝑖 = 𝐹𝑖;
şartlarına göre tek olarak bulunmasıdır (Aydın ve ark. 2003, Bulgak ve Eminov 2003).
4.3. Bir Algoritma
Tablo 4.2 de verilen değerlere göre herhangi bir 𝑥 için hesaplama yapmak istersek algoritmayı oluşturan işlem adımlarını kısım 4. 2 de belirtilen formülleri göz önünde tutarak aşağıdaki gibi yazabiliriz.
Algoritma 4.1. 𝐵𝑎ş𝑙𝑎 𝐺𝑖𝑟𝑖ş 𝐷𝑒ğ𝑒𝑟𝑙𝑒𝑟𝑖 𝑥0, 𝑥1, 𝑥2, … , 𝑥𝑛−1; 𝑦0, 𝑦1, 𝑦2, … , 𝑦𝑛−1; 𝐹0, 𝐹1, 𝐹2 , … , 𝐹𝑛−1; 𝑥 Çı𝑘𝑡ı 𝑑𝑒ğ𝑒𝑟𝑖: 𝑦 Adım 1: 𝐸ğ𝑒𝑟 𝑛 < 2 𝑖𝑠𝑒 𝑎𝑙𝑔𝑜𝑟𝑖𝑡𝑚𝑎𝑦ı 𝑜𝑙𝑢ş𝑡𝑢𝑟𝑎𝑛 𝑖ş𝑙𝑒𝑚 𝑎𝑑ı𝑚𝑙𝑎𝑟ı𝑛ı 𝑡𝑒𝑟𝑘 𝑒𝑡 Adım 2: 𝐸ğ𝑒𝑟 𝑥 < 𝑥0 𝑣𝑒𝑦𝑎 𝑥 > 𝑥𝑛−1 ise algoritmayı oluşturan işlem adımlarını
terk et
Adım 3: 𝑗 = 1,2,3, … , 𝑛 − 1; olmak üzere her bir 𝑗 için eğer 𝑥 ≥ 𝑥𝑗 ise 4. adımı
yürüt
Adım 4: 𝑖 = 1,2,3, … , 𝑗 ; olmak üzere her bir 𝑖 için
Adım 4.1: 𝑤 = [(𝑦𝑖 − 𝑦𝑖−1)/(𝑥𝑖− 𝑥𝑖−1) − 𝐹𝑖−1]/(𝑥𝑖− 𝑥𝑖−1); Adım 4.2: 𝑎 = [(𝐹𝑖− 𝐹𝑖−1)/(𝑥𝑖 − 𝑥𝑖−1) − 2𝑤]/(𝑥𝑖− 𝑥𝑖−1); Adım 4.3: 𝑏 = − 𝑥𝑖+ 2𝑥𝑖−1 𝑎 + 𝑤𝑖; Adım 4.4: 𝑐 = 𝐹𝑖−1− 3𝑎(𝑥𝑖−1)2− 2𝑏𝑥 𝑖−1; Adım 4.5: 𝑑 = 𝑦𝑖−1− 𝑎(𝑥𝑖−1)3− 𝑏(𝑥𝑖−1)2− 𝑐𝑥𝑖−1; Adım 5: 𝑦 = 𝑎𝑥3+ 𝑏2+ 𝑐𝑥 + 𝑑;
Bu algoritmaya bağlı olarak n adet noktadan geçen spline eğrilerine ait noktaları hesaplayan yordam aşağıdaki şekildedir.
4.4. Algoritma Ġçin Yordam
Algoritma 4.1 in bilgisayarda uygulanabilir duruma getirmek için C programlama dili kullanılarak aşağıdaki yordam hazırlandı. Yordam ismi spline3 olarak tanıtıldı.
Yordam 4.1.
double spline3(double* X, double* Y, double* F, double x) {
double a,b,c,d,w; int n;
if((n=XMax)<2) return 0;
if((x<X[0])||(x>X[n-1])) return 0; for(int i=1;i<n;i++) if(x<X[i]) break; for(int k=1;k<=i;k++) { w=(Y[k]-Y[k-1])/(X[k]-X[k-1]); w=(w-F[k-1])/(X[k]-X[k-1]); a=(F[k]-F[k-1])/(X[k]-X[k-1]); a=(a-2*w)/(X[k]-X[k-1]); b=w-(X[k]+2*X[k-1])*a; c=F[k-1]-3*a*X[k-1]*X[k-1]-2*b*X[k-1]; d=Y[k-1]-a*X[k-1]*X[k-1]*X[k-1]-b*X[k-1]*X[k-1]-c*X[k-1]; } return a*x*x*x+b*x*x+c*x+d; }
Bu yordamda giriş olarak Tablo 4.2 ile verilen değerler ve hesaplanmak istenen değer olarak 𝑥 sayısı girilmektedir. Yordamın hesapladığı değer, girilen x sayısına karşılık gelen y değeridir.
Örnek4.1. 𝑋 1 2 3 4 5 𝑌 −3 3 2 −2 1 𝐹 0 0 0 0 0 Tablo 4. 3
Tablo 4.3 de yer alan veriler için 𝑥 = 3,7 ve 𝑥 = 2,07 için 𝑦 değerlerini hesaplayalım.
Tablo 4.3 de 5 adet nokta için 𝑋 , 𝑌, 𝐹 değerleri verilmiştir. Yordam 4.1 e 𝑋 , 𝑌, 𝐹 vektörlerini ve aranan 𝑥 değerini girdi olarak verdiğimizde 𝑥 e karşılık gelen 𝑦 değerini Algoritma 4.1 i uygulayarak bulacaktır. 𝑋 , 𝑌, 𝐹 vektörleri C programlama dilinin kurallarına göre tanıtılmıştır.
#define XMax 5 double X[XMax]={ 1, 2, 3, 4, 5}; double Y[XMax]={-3, 3, 2,-2, 1}; double F[XMax]={ 0, 0 ,0, 0, 0}; double y; y=spline3(X, Y, F, 3.7); 𝑦: −1.1359999999998536 y=spline3(X, Y, F, 2.07); 𝑦: 2.9859860000000111
5. ĠKĠ BOYUTLU ENTERPOLASYON FONKSĠYONU
5.1. Problemin Tanımı
𝑥0t düzleminde 𝑅 = 𝑎, 𝑏 × 𝑐, 𝑑 dikdörtgenini ele alalım.
𝑎 = 𝑡1< 𝑡2< ⋯ < 𝑡𝑚 = 𝑏; 𝑚 ≥ 2 𝑐 = 𝑥1< 𝑥2< ⋯ < 𝑥𝑛 = 𝑑; 𝑛 ≥ 2
olmak üzere, 𝑡𝑂𝑥 düzleminde 𝑛 × 𝑚 adet nokta yer alır (Şekil 5. 1).
𝜁𝑖,𝑗 = 𝑡𝑖, 𝑥𝑗 ; 𝑖 = 1,2, … , 𝑚 − 1; 𝑗 = 1,2, … , 𝑛 − 1; 𝜁𝑖,𝑗 noktaları, 𝑅 = 𝑎, 𝑏 × 𝑐, 𝑑
dikdörtgeninin düğüm noktaları olarak isimlendirilirler(Spath 1995) .
Bu dikdörtgen 𝑚 − 1 × 𝑛 − 1 adet alt dikdörtgene bölünmüştür (Şekil 5.1). Bu alt dikdörtgenlerden her biri:
𝑅 𝑖,𝑗 = 𝑡 , 𝑥 ∶ 𝑡𝑖 ≤ 𝑡 ≤ 𝑡𝑖+1 , 𝑥𝑖 ≤ 𝑥 ≤ 𝑥𝑖+1 𝑖 = 1,2, … , 𝑚 − 1; 𝑗 = 1,2, … , 𝑛 − 1; 𝜁𝑖+1,𝑗 +1 𝜁𝑖+1,𝑗 𝜁𝑖,𝑗 𝜁𝑖,𝑗 +1 ġekil 5. 2 𝑏 𝑎 𝑡 𝑥 𝑐 𝑑 ġekil 5. 1
şeklinde tanımlanır. 𝑅 𝑖,𝑗 alt dikdörtgenlerin köşe noktaları:
𝜁𝑖,𝑗 , 𝜁𝑖+1,𝑗 , 𝜁𝑖+1,𝑗 +1 , 𝜁𝑖,𝑗 +1 olarak gösterilir (Şekil 5. 2) ve m+𝑛 adet ızgara çizgisi 𝑡 = 𝑡𝑖; 𝑖 = 1,2, … 𝑚 − 1 𝑣𝑒 𝑥 = 𝑥𝑗; 𝑗 = 1,2, … 𝑛 − 1
olarak gösterilir.
İki boyutlu enterpolasyon problemi;
𝑅 𝑖,𝑗 , 𝑖 = 1,2, … , 𝑚 − 1; 𝑗 = 1,2, … , 𝑛 − 1; bir ızgara tanıtılsın. 𝑓 𝑡𝑖, 𝑥𝑗 = 𝑢𝑖,𝑗 şartları sağlayan 𝑓: 𝑅 → 𝑅
fonksiyonuna enterpolasyon fonksiyon denir. Enterpolasyon probleminin hedefi ızgara üzerinde tanıtılan fonksiyonun (Şekil 5.3) bir bölge üzerine genişletilmesidir.
5.2. Ġki Boyutlu Enterpolasyon Polinomlarının Lagrange Formu
Spath (1995) a göre enterpolasyon probleminin bir çözümü iki değişkenli Lagrange polinomlarıdır, 𝐿𝑛𝑘 𝑥 = 𝐿 𝑘 𝑛 𝑥, 𝑥 1, … , 𝑥𝑛 = 𝑥 − 𝑥𝑖 𝑥𝑘 − 𝑥𝑖 𝑛 𝑖=1 𝑖≠𝑘
şeklinde tanımlı temel Lagrange fonksiyonu iki değişkenli bir polinom olarak, Spath (1995) aşağıdaki gibi göstermiştir.
2 1 2 1 0 𝑢 𝑡 𝑥 ġekil 5. 3
𝐹 𝑥, 𝑦 = 𝑎𝑘𝑙 𝑚 𝑙=1 𝑛 𝑘=1 𝑥𝑘−1𝑦𝑙−1; 𝐹 𝑥, 𝑦 = (1, 𝑥, 𝑥2, … , 𝑥𝑛−1) 𝑎11 ⋯ 𝑎1𝑚 ⋮ ⋱ ⋮ 𝑎𝑛1 ⋯ 𝑎𝑛𝑚 1 𝑦 ⋮ 𝑦𝑚 −1
Spath (1995) göre, nokta sayısı arttıkça Lagrange formunda hesaplama yapmanın oldukça zorlaştığını ve yüksek dereceden polinomların karşımıza çıktığını açıkca göstermiştir. Bu nedenle hesaplanabilir bir yöntem olarak spline fonksiyonları, iki boyutlu enterpolasyonda daha çok tercih edilir olduğu sonucu çıkarılmıştır.
6. ĠKĠ BOYUTLU ENTERPOLASYON PROBLEMĠNDE KÜBĠK SPLĠNE FONKSĠYONLARININ KULLANILMASI
6.1. BaĢlangıç Verilerinin Tanımlanması
Bir enterpolasyon problemini çözmek için, tek boyutlu fonksiyonlarda hedef fonksiyonun seçilen noktalar üzerinde değerleriyle birlikte bu noktalar üzerinde türevlerde belirtildi. Bu yaklaşımı iki boyutla fonksiyonlarına genişletelim. Şöyle ki; 𝑥0t düzleminde 𝑅 = 𝑎, 𝑏 × 𝑐, 𝑑 dikdörtgenini ele alalım.
𝑎 = 𝑡0< 𝑡1< ⋯ < 𝑡𝑚−1= 𝑏; 𝑚 ≥ 1 𝑐 = 𝑥0 < 𝑥1< ⋯ < 𝑥𝑛−1= 𝑑; 𝑛 ≥ 1
olmak üzere, 𝑡𝑂𝑥 düzleminde 𝑛 × 𝑚 adet nokta yer alır ve bu ızgara üzerinde 𝑢 = 𝑢 0,0 , 𝑢 0,1 , … , 𝑢 0,𝑛−1 , 𝑢 1,0 , … , 𝑢 𝑚−1,𝑛−1 ;
𝑢(𝑖,𝑗 ) ∈ 𝑅, 𝑖 = 0,1, … , 𝑚 − 1; 𝑗 = 0,1,2, … , 𝑛 − 1 değerleri tanımlı olsun. Bununla birlikte 𝑛 × 𝑚 elemanlı
𝑓𝑡 = 𝑓𝑡 0,0 , 𝑓𝑡 0,1 , … , 𝑓𝑡 0,𝑛−1 , 𝑓𝑡 1,0 , … , 𝑓𝑡 𝑚−1,𝑛−1 ;
𝑓𝑡 (𝑖,𝑗) ∈ 𝑅, 𝑖 = 0,1, … , 𝑚 − 1; 𝑗 = 0,1,2, … , 𝑛 − 1 ve
𝑓𝑥 = 𝑓𝑥 0,0 , 𝑓𝑥 0,1 , … , 𝑓𝑥 0,𝑛−1 , 𝑓𝑥 1,0 , … , 𝑓𝑥 𝑚−1,𝑛−1 ;
𝑓𝑥 (𝑖,𝑗) ∈ 𝑅, 𝑖 = 0,1, … , 𝑚 − 1; 𝑗 = 0,1,2, … , 𝑛 − 1
iki küme elimizde olsun. Hedefimiz; 𝑅 üzerinde tanımlı bir 𝑓(𝑡, 𝑥) türetilebilen fonksiyon bulmak, şöyle ki (𝑖 = 0,1, … , 𝑚 − 1; 𝑗 = 0,1,2, … , 𝑛 − 1 )
𝑓 𝑡𝑖, 𝑥𝑗 = 𝑢 𝑖,𝑗 , 𝑓𝑡′ 𝑡
𝑖, 𝑥𝑗 = 𝑓𝑡 𝑖,𝑗 𝑣𝑒 𝑓𝑥′ 𝑡𝑖, 𝑥𝑗 = 𝑓𝑥 𝑖,𝑗
Bu bilgilere dayanarak ilk önce Tablo 6.1 oluşur. Bu tabloya dayanarak 𝐻(𝑡0, 𝑥), 𝑥0 ≤ 𝑥 ≤ 𝑥𝑚 −1 üçüncü dereceden spline fonksiyonu hesaplanır.
Sonra Tablo 6.2 oluşur. Bu tabloya dayanarak 𝐻(𝑡1, 𝑥), 𝑥0 ≤ 𝑥 ≤ 𝑥𝑚 −1 üçüncü dereceden spline fonksiyonu hesaplanır. Benzer şekilde oluşan verilere dayanarak 𝐻 𝑡2, 𝑥 , … , 𝐻(𝑡𝑛−1, 𝑥), 𝑥0 ≤ 𝑥 ≤ 𝑥𝑚 −1 fonksiyonları hesaplanır. Dolayısıyla n tane
𝑇𝑡0 𝑡0 𝑡1 𝑡2 … 𝑡𝑚 −1 𝑋𝑡0 𝑥0 𝑥0 𝑥0 … 𝑥0 𝐹𝑡0 𝑓𝑡(0,0) 𝑓𝑡(1,0) 𝑓𝑡(2,0) … 𝑓𝑡(𝑚 −1,0) 𝑈𝑡0 𝑢0,0 𝑢1,0 𝑢2,0 … 𝑢𝑚−1,0 Tablo 6. 1 𝑇𝑡1 𝑡0 𝑡1 𝑡2 … 𝑡𝑚 −1 𝑋𝑡1 𝑥1 𝑥1 𝑥1 … 𝑥1 𝐹𝑡1 𝑓𝑡(0,1) 𝑓𝑡(1,1) 𝑓𝑡(2,1) … 𝑓𝑡(𝑚 −1,1) 𝑈𝑡1 𝑢0,1 𝑢1,1 𝑢2,1 … 𝑢𝑚−1,1 Tablo 6. 2 𝑇𝑥0 𝑡0 𝑡0 𝑡0 … 𝑡0 𝑋𝑥0 𝑥0 𝑥1 𝑥2 … 𝑥𝑛−1 𝐹𝑥0 𝑓𝑥(0,0) 𝑓𝑥(0,1) 𝑓𝑥(0,2) … 𝑓𝑥(0,𝑛−1) 𝑈𝑥0 𝑢0,0 𝑢0,1 𝑢0,2 … 𝑢0,𝑛−1 Tablo 6. 3 𝑇𝑥1 𝑡1 𝑡1 𝑡1 … 𝑡1 𝑋𝑥1 𝑥0 𝑥1 𝑥2 … 𝑥𝑛−1 𝐹𝑥1 𝑓𝑥(1,0) 𝑓𝑥(1,1) 𝑓𝑥(1,2) … 𝑓𝑥(1,𝑛−1) 𝑈𝑥1 𝑢1,0 𝑢1,1 𝑢1,2 … 𝑢1,𝑛−1 Tablo 6. 4
Verilere dayanarak Tablo 6.3 oluşur ve 𝑆(𝑡, 𝑥0), 𝑡0 ≤ 𝑡 ≤ 𝑡𝑛−1 üçüncü dereceden spline fonksiyonu hesaplanır. Sonra Tablo 6.4 oluşuyor ve 𝑆(𝑡, 𝑥1), 𝑡0 ≤ 𝑡 ≤ 𝑡𝑛−1 üçüncü dereceden spline fonksiyonu hesaplanır.
Benzer şekilde verilerimize dayanarak 𝑆 𝑡, 𝑥2 , … , 𝑆 𝑡, 𝑥𝑛−1 , 𝑡0 ≤ 𝑡 ≤ 𝑡𝑛−1 üçüncü
dereceden spline fonksiyonları hesaplanır. Dolayısıyla m adet tek değişkenli spline fonksiyonu elimize geçer.
6.2. Spline Fonksiyonlara Ait Noktaların Üç Boyutlu Koordinat Sistemine YerleĢtirilmesi
Kısım 6.1 de tanıtılan giriş verilerine bağlı olarak toplam 𝑛 + 𝑚 adet spline eğrisi Algoritma 4.1 kullanılarak hesaplanabilir.
𝐻 𝑡0, 𝑥 , 𝐻 𝑡1, 𝑥 , 𝐻 𝑡2, 𝑥 , … , 𝐻(𝑡𝑚−1, 𝑥), 𝑥0 ≤ 𝑥 ≤ 𝑥𝑚 −1 ve
𝑆(𝑡, 𝑥0), 𝑆(𝑡, 𝑥1), 𝑆(𝑡, 𝑥2), … , 𝑆 𝑡, 𝑥𝑛−1 , 𝑡0 ≤ 𝑡 ≤ 𝑡𝑛−1
toplam n+m adet üçüncü dereceden spline fonksiyonları hesaplanabilir.
𝑅 = 𝑎, 𝑏 × 𝑐, 𝑑 dikdörtgenini üzerinde
𝑎 = 𝑡0< 𝑡1< ⋯ < 𝑡𝑚−1= 𝑏; 𝑚 ≥ 1 𝑐 = 𝑥0 < 𝑥1< ⋯ < 𝑥𝑛−1= 𝑑; 𝑛 ≥ 1
olmak üzere bir ızgara vardır. Bu ızgarayı bilgisayar ekranındaki piksel kümesi ile uyumlu hale getirmeliyiz. Mevcut ızgara üzerinde tanımlı n+m adet üçüncü dereceden spline fonksiyonlarının her biri için, ardışık piksellere karşılık gelen adım büyüklüğüyle fonksiyonların değerleri hesaplanır(Şekil 6. 1).
𝑛 𝑎𝑑𝑒𝑡 𝑡 𝑦ö𝑛ü𝑛𝑑𝑒 𝑠𝑝𝑙𝑖𝑛𝑒 𝑒ğ𝑟𝑖𝑠𝑖 𝑚 𝑎𝑑𝑒𝑡 𝑥 𝑦ö𝑛ü𝑛𝑑𝑒 𝑠𝑝𝑙𝑖𝑛𝑒 𝑒ğ𝑟𝑖𝑠𝑖 𝑡0 𝑡1 𝑡2 𝑡3 𝑡𝑚 −1 𝑥1 𝑥2 𝑥3 𝑥𝑛−1 𝑥0 ġekil 6. 1
𝑡 𝑥 1 2 3 4 5 1 1 2 3 2 1 2 1 2 3 2 1 3 1 2 3 2 1 4 1 2 3 2 1 5 1 2 3 2 1 Tablo 6. 5 ġekil 6. 2 Örnek 6.1. 𝑡0 = 1, 𝑡1 = 2, 𝑡2 = 3, 𝑡3 = 4, 𝑡4 = 5; 𝑥0 = 1, 𝑥1 = 2, 𝑥2 = 3, 𝑥3 = 4, 𝑥4 = 5
olmak üzere 𝑢(𝑖,𝑗 ) değerleri Tablo 6.5 de verildi.
𝑓𝑡 (𝑖,𝑗) = 0; 𝑣𝑒 𝑓𝑥 (𝑖,𝑗 ) = 0; 𝑖 = 0, … , 4 𝑣𝑒 𝑗 = 0, … , 4;
her bir spline fonksiyon için 500 nokta seçilirse Şekil 6.2 deki yüzey görüntüsü oluşacaktır.
Bu örnekte 𝑛 = 5 ve 𝑚 = 5 olmak üzere 𝑛 + 𝑚 = 10 adet spline eğrisi için hesaplama yapılmıştır. Her bir eğri için 500 nokta hesaplanmıştır. Toplam 5000 nokta için hesaplama yapılmış ve görüntü bu 5000 nokta kullanılarak oluşturulmuştur.
6.3. Türev Değerleriyle Ġlgili Kararlar
Şöyleki; 𝑥0t düzleminde 𝑅 = 𝑎, 𝑏 × 𝑐, 𝑑 dikdörtgenini ele alalım.
𝑎 = 𝑡0< 𝑡1< ⋯ < 𝑡𝑚−1= 𝑏; 𝑚 ≥ 1 𝑐 = 𝑥0 < 𝑥1< ⋯ < 𝑥𝑛−1= 𝑑; 𝑛 ≥ 1
olmak üzere, 𝑡𝑂𝑥 düzleminde 𝑛 × 𝑚 adet nokta yer alır ve bu ızgara üzerinde 𝑢 = 𝑢 0,0 , 𝑢 0,1 , … , 𝑢 0,𝑛−1 , 𝑢 1,0 , … , 𝑢 𝑚−1,𝑛−1 ; 𝑢(𝑖,𝑗 )∈ 𝑅
değerler tanımlı olsun. Eğer
𝑓𝑡 = 𝑓𝑡 0,0 , 𝑓𝑡 0,1 , … , 𝑓𝑡 0,𝑛−1 , 𝑓𝑡 1,0 , … , 𝑓𝑡 𝑚−1,𝑛−1 ; 𝑓𝑡 (𝑖,𝑗) ∈ 𝑅
ve 𝑥 yönünde türev değerleri
𝑓𝑥 = 𝑓𝑥 0,0 , 𝑓𝑥 0,1 , … , 𝑓𝑥 0,𝑛−1 , 𝑓𝑥 1,0 , … , 𝑓𝑥 𝑚−1,𝑛−1 ; 𝑓𝑥 (𝑖,𝑗) ∈ 𝑅
tanımsız ise bu değerleri 𝑢 kümesini kullanarak, türevin sonlu farklarla yaklaşımı yoluyla kendimiz oluşturabiliriz. Bu yaklaşım kullanılarak aşağıdaki iki örnek çözüldü.
Örnek 6. 2.
Tablo 6. 5 de verilen 𝑢(𝑖,𝑗 ) değerlerine göre ve
𝑡0 = 1, 𝑡1 = 2, 𝑡2 = 3, 𝑡3 = 4, 𝑡4 = 5;
𝑥0 = 1, 𝑥1 = 2, 𝑥2 = 3, 𝑥3 = 4, 𝑥4 = 5
olmak üzere, her bir düğüm noktasındaki türev değerlerini kısım 6. 3 de belirtilen yaklaşıma göre hesapladığımızda Şekil 6. 3 deki yüzey görüntüsü oluşacaktır.
ġekil 6. 3
Bu örnekte 𝑛 = 5 ve 𝑚 = 5 olmak üzere 𝑛 + 𝑚 = 10 adet spline eğrisi için heasplama yapılmıştır. Her bir eğri için 500 nokta hesaplanmıştır. Toplam 5000 nokta için hesaplama yapılmış ve görüntü bu 5000 nokta kullanılarak oluşturulmuştur.
Örnek 6. 3.
𝑡0 = 0, 𝑡1 = 1, 𝑡2 = 2, 𝑡3 = 3, 𝑡4 = 4, 𝑡5 = 5, 𝑡6 = 6, 𝑡7 = 7, 𝑡8 = 8, 𝑡9 = 9, 𝑡10 = 12 𝑥0 = 0, 𝑥1 = 1, 𝑥2 = 2, 𝑥3 = 3, 𝑥4 = 4
𝑥5 = 5, 𝑥6 = 6, 𝑥7 = 7, 𝑥8 = 8, 𝑥9 = 9, 𝑥10 = 10
olmak üzere 𝑢(𝑖,𝑗 ) değerleri Tablo 6. 6 da verilmiş olsun. Her bir düğüm noktasında 𝑡 yönünde ve 𝑥 yönünde birinci türevler kısım 6. 3 de belirtilen yaklaşıma göre belirlendiğinde, iki boyutlu spline fonksiyonun görüntüsü Şekil 6. 4 görülmektedir. Bu grafik için her bir eğri üzerinde 500 nokta hesaplanmıştır. Grafik 10000 nokta kullanılarak oluşturulmuştur.
𝑡 𝑥 1 2 3 4 5 6 7 8 9 12 1 0 1 2 1 1 1 2 3 4 2 2 0 1 3 2 1 1 2 3 4 2 3 1 1 3 2 1 1 2 3 4 2 4 1 2 3 2 1 1 2 4 4 2 5 1 2 3 2 1 1 2 4 4 2 6 1 3 4 3 2 1 2 4 4 2 7 1 3 4 3 2 1 2 4 4 2 8 1 3 4 3 2 1 2 4 4 2 9 1 3 4 3 2 1 2 4 4 2 10 1 3 4 3 2 1 2 4 4 2 Tablo 6. 6 ġekil 6. 4
6. 4. Ġki Boyutlu Spline Fonksiyonun Bir Noktanın Değerinin Hesaplanması
Burada elde edilen yüzeye üzerinde istenilen bir noktasının koordinatları nasıl hesaplanır açıklamalıyız.
Kısım 6.1 de tanıtılan başlangıç verileri göz önünde bulunduralım.
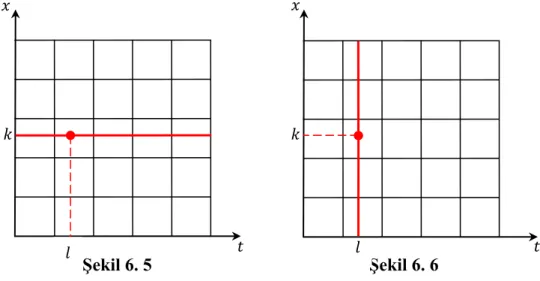
𝑡0 ≤ 𝑘 ≤ 𝑡𝑚 −1 𝑣𝑒 𝑥0 ≤ 𝑙 ≤ 𝑥𝑛−1 olmak üzere 𝑢(𝑘, 𝑙) değerini hesaplayan işlem adımları tanımlanacaktır. Kısım 6.1 ızgara çizgileri üzerinde yer alan spline eğrilerine ait tablolar verdi (Tablo 6. 1 ile Tablo 6. 4 ya kadar olan tablolar) . Bu tabloları kullanarak 𝑡 yönünde veya 𝑥 yönünde hesaplama yapmak üzere yeni iki tablo oluşturulacaktır. Oluşan iki yeni tablodan keyfi olarak herhangi birini kullanabiliriz. 𝑡 yönünde veya 𝑥 yönünde hesaplama yapmak keyfi bir seçim olacaktır (Şekil 6. 5 ve Şekil 6. 6).
𝑡 yönünde 𝑢(𝑘, 𝑙) nin hesaplanması;
Tablo 6. 3 ve Tablo 6. 4 de belirtilen 𝑥 yönündeki 𝑚 adet spline eğrilerine ait her bir tablo verilerine 𝑙 değeri için Algoritma 4. 1 uygulanır,
𝑈𝑙𝑗 ∶= 𝑠𝑝𝑙𝑖𝑛𝑒3 𝑋𝑥𝑗, 𝑈𝑥𝑗, 𝐹𝑥𝑗, 𝑙 ; 𝑗 = 0,1,2, … , 𝑚 − 1 olmak üzere, 𝑇 𝑡0 𝑡1 𝑡2 … 𝑡𝑚 −1 𝑈𝑙 𝑈𝑙0 𝑈𝑙1 𝑈𝑙2 … 𝑈𝑙𝑚−1 𝐹 𝐹0 𝐹1 𝐹2 … 𝐹𝑚 −1 Tablo 6. 7 ġekil 6. 6 𝑙 𝑘 𝑘 𝑥 𝑥 𝑡 𝑡 ġekil 6. 5 𝑙
Tablo 6. 7 elde edilir. Bu tabloda reel sayı dizisi 𝐹0, 𝐹1, … , 𝐹𝑚 −1 keyfi seçilmiş bir dizidir.
𝑢 𝑘, 𝑙 ∶= 𝑠𝑝𝑙𝑖𝑛𝑒3 𝑇, 𝑈𝑙, 𝐹, 𝑘 ; 6.6 6.6 ifadesi 𝑡 yönünde hesaplama ile aranan 𝑢 𝑘, 𝑙 değerini nihai olarak verir
𝑥 yönünde 𝑢(𝑘, 𝑙) nin hesaplanması;
Tablo 6. 1 ve Tablo 6. 2 de gösterilen 𝑡 yönündeki 𝑛 adet spline eğrilerine ait her bir tablo verilerine 𝑘 değeri için Algoritma 4. 1 uygulanır
𝑈𝑘𝑗 ∶= 𝑠𝑝𝑙𝑖𝑛𝑒3 𝑇𝑡𝑗, 𝑈𝑡𝑗, 𝐹𝑡𝑗, 𝑘 ; 𝑗 = 0,1,2, … , 𝑛 − 1 olmak üzere, 𝑋 𝑥0 𝑥1 𝑥2 … 𝑥𝑛−1 𝑈𝑘 𝑈𝑘0 𝑈𝑘1 𝑈𝑘2 … 𝑈𝑘𝑛−1 𝐹 𝐹0 𝐹1 𝐹2 … 𝐹𝑛−1 Tablo 6. 8
Tablo 6. 8 elde edilir. Bu tabloda reel sayı dizisi 𝐹0, 𝐹1, … , 𝐹𝑛−1 keyfi seçilmiş bir dizidir.
𝑢 𝑘, 𝑙 ∶= 𝑠𝑝𝑙𝑖𝑛𝑒3 𝑋, 𝑈𝑘, 𝐹, 𝑙 ; 6.7 (6.7) ifadesi 𝑥 yönünde hesaplama ile aranan 𝑢 𝑘, 𝑙 değerini nihai olarak verir.
Örnek 6.4. 𝑡 𝑥 1 2 3 4 5 1 1 1 1 1 1 2 1 2 2 2 1 3 1 2 3 2 1 4 1 2 2 2 1 5 1 1 1 1 1 Tablo 6.9
𝑓𝑡 (𝑖,𝑗) = 0; 𝑣𝑒 𝑓𝑥 (𝑖,𝑗) = 0; ve Tablo 6.9 de verilen giriş değerlerini göz önünde tutarak, oluşan yüzey üzerinde 𝑢(2.3,2.8) noktasının değerini 𝑡 yönünde hesaplanmasıyla;
𝑢 2.3,2.8 = 2.1935359999999946 bulunur.
ġekil 6. 7
𝑢 2.3,2.8 noktasının, geliştirilen bilgisayar yazılımıyla elde edilen görüntüsü Şekil 6.7 de verilmektedir.
7. KISMĠ TÜREVLĠ DĠFERENSĠYEL DENKLEME BAĞLI OLARAK IZGARA VE SPLĠNE EĞRĠLERĠ
7.1. BaĢlangıç Verilerinin Tanımlanması
Bölüm 3 de (3.3) ile verilen Cauchy problemini tekrar ele alırsak; 𝑎 ≠ 0; 𝛼, 𝛽, 𝑇 > 0 reel sayılar 𝜑: [𝛼, 𝛽] → 𝑅 türetilebilen fonksiyon ve
𝐺 = { 𝑡, 𝑥 ; 𝑎𝑡 + 𝛼 ≤ 𝑥 ≤ 𝑎𝑡 + 𝛽, 0 ≤ 𝑡 ≤ 𝑇} olmak üzere
𝑢 𝑡 𝑡, 𝑥 + 𝑎𝑢 𝑥 𝑡, 𝑥 = 0; (𝑡, 𝑥) ∈ 𝐺
𝑢 0, 𝑥 = 𝜑 𝑥 , 𝑥 ∈ [𝛼, 𝛽] Cauchy probleminin çözümü var, tek ve 𝑢 𝑡, 𝑥 = 𝜑 𝑥 − 𝑎𝑡 , 𝑡, 𝑥 ∈ 𝐺 dir.
Cauchy probleminin çözümünün grafiksel olarak gösterilmesi için önemli olan şu unsurların tanımlanması gerekir. [𝛼, 𝛽] aralığında verilen 𝜑 fonksiyonu bu aralıkta “iyi” temsil eden 𝑛 tane nokta seçilir;
𝑥0 = 𝛼 < 𝑥1 < 𝑥2 < ⋯ < 𝑥𝑛−2 < 𝑥𝑛−1 = 𝛽.
Verilen 𝜑(𝑥) fonksiyonunun her bir 𝑥𝑖 için değeri 𝑥 yönündeki spline eğrilerine ait düğüm noktalarının yüksekliği olarak 𝜑(𝑥𝑖) ve düğüm noktalarındaki türev değeri
olarak 𝜑′ 𝑥𝑖 lere dayanarak bir 𝑔(𝑥) üçüncü dereceden spline fonksiyonu elde edilir ve 𝑧 𝑡, 𝑥 = 𝑔 𝑥 − 𝑎𝑡 , 𝑡, 𝑥 ∈ 𝐺 fonksiyonun grafiği “çizilir”. Gerçekten resim tekniği gereği farklı 𝑡 „ler seçilir; 0 = 𝑡0 < 𝑡1 < ⋯ < 𝑇 = 𝑡𝑚−1 . Bu bilgiler bize
bir ızgara tanıtır. Bu ızgara farklı 𝑎‟lar için Şekil 7.1 ve Şekil 7.2 de verildi. Sonra 𝑧 𝑡, 𝑥 = 𝑔 𝑥 − 𝑎𝑡 , 𝑡 = 𝑡0, 𝑡1, … , 𝑡𝑚−1, 𝑥 ∈ 𝛼 + 𝑎𝑡𝑗, 𝛽 + 𝑎𝑡𝑗
ve
𝑧 𝑡, 𝑥 = 𝑔 𝑥 − 𝑎𝑡 , 𝑥 = 𝑥0, 𝑥1, … , 𝑥𝑛−1, 𝑡 ∈ 0, 𝑇
eğrileri çizilir. Çizim, resim tekniklerine uygun (örneğin perspektif) olarak yapılır. Bunun için kullanılan bilgiler tezin Ek bölümünde toplandı.
SONUÇ: Burada 𝜑(𝑥) fonksiyonu yerine onu temsil eden üçüncü dereceden spline fonksiyonu alındı.
7.2. Izgara Tanımı
Şekil 7. 1 ve Şekil 7. 2, (7.1) de verilen Cauchy probleminin çözüm bölgesi 𝐺 yi gösteriyor. 𝑥 − 𝑎𝑡 = 𝛽 , 𝑥 − 𝑎𝑡 = 𝛼 , 𝑡 ∈ 0, 𝑇 doğruları arasında kalan; sol sınırı 0, 𝑥 , 𝑥 ∈ 𝛼, 𝛽 ve sağ sınırı 𝑇, 𝑥 , 𝑥 ∈ 𝛼 + 𝑎𝑇, 𝛽 + 𝑎𝑇 olan bölge 𝐺 olsun.
G bölgesi üzerinde bir ızgara ve bu ızgaraya ait düğüm noktaları Şekil 7. 3 de gösterilmiştir.
𝜁𝑖,𝑗 noktaları,
𝜁𝑖,𝑗 = 𝑡𝑖, 𝑎 𝑡𝑖 − 𝑡0 + 𝑥𝑗 ; 𝑖 = 0,1, … , 𝑚 − 1; 𝑗 = 0,1, … , 𝑛 − 1;
şeklinde tanımlansın.
𝜁𝑖,𝑗 noktaları çözüm bölgesinin düğüm noktaları olarak isimlendirilirler.
𝑥 𝛽 = 𝑥𝑛−1 𝛼 = 𝑥0 𝑡0 𝑡𝑚−1 𝑡 ġekil 7. 3 𝒂 > 0
𝐺
𝛽 = 𝑥𝑛−1 𝑥 𝛽 = 𝑥𝑛−1 𝛼 = 𝑥0 𝑡0 𝑇 = 𝑡𝑚−1 𝑡𝐺
𝑥 𝛼 = 𝑥0 𝑡0 𝑇 = 𝑡𝑚−1 𝑡 𝒂 < 0 ġekil 7. 1 ġekil 7. 2Bahsedilen 𝑔(𝑥) spline fonksiyonu kurmak için Tablo 7.1 kullanılır. 𝑇𝑥0 𝑡0 𝑡0 𝑡0 … 𝑡0 𝑋𝑥0 𝑥0 𝑥1 𝑥2 … 𝑥𝑛−1 𝐹𝑥0 𝜑′ 𝑥0 𝜑′ 𝑥1 𝜑′ 𝑥2 … 𝜑′ 𝑥𝑛−1 𝑈𝑥0 𝜑(𝑥0) 𝜑(𝑥1) 𝜑(𝑥2) … 𝜑(𝑥𝑛−1) Tablo 7. 1
Şimdi iki örnek verelim.
Örnek 7. 1.
𝐺 = { 𝑡, 𝑥 ; 1.2𝑡 + 1 ≤ 𝑥 ≤ 1.2𝑡 + 5,0 ≤ 𝑡 ≤ 5} ve
𝑥0 = 1, 𝑥1 = 2, 𝑥2 = 3, 𝑥3 = 4, 𝑥4 = 5
seçerek 𝜑(𝑥) Tablo 7.2‟yi sağlayan üçüncü dereceden bir spline fonksiyonu olmak üzere 𝑢 𝑡 𝑡, 𝑥 + 6 5𝑢 𝑥 𝑡, 𝑥 = 0; 𝑡, 𝑥 ∈ 𝐺 𝑢 0, 𝑥 = 𝜑 𝑥 ; 𝑥 ∈ 1,5
Cauchy problemin çözümünü grafiksel olarak gösterelim.
𝑋 1 2 3 4 5
𝜑(𝑥) −3 3 2 −2 1
𝜑′(𝑥) 0 0 0 0 0
Tablo 7.2
Söz konusu algoritmayı kullanmak için
olarak seçelim. Bu çalışmanın sonucunda geliştirilen bilgisayar yazılımının ortaya koyduğu sonuç Şekil 7.4 de görülmektedir.
ġekil 7. 4
İkinci örneğe geçelim.
Örnek 7. 2. 𝐺 = {(𝑡, 𝑥), 0 𝑡 100, 0 + 0.5𝑡 𝑥 100 + 0.5𝑡 } bir paralelkenar ve 𝜑 𝑥 = 2𝑥1.45 − 2.5𝑥1.4; 0 ≤ 𝑥 ≤ 100 olmak üzere 𝑢 𝑡 𝑡, 𝑥 + 0.5𝑢 𝑥 𝑡, 𝑥 , 𝑡, 𝑥 ∈ 𝐺; (7.1) 𝑢 0, 𝑥 = 𝜑 𝑥 ; 0 ≤ 𝑥 ≤ 100
Cauchy problemini ele alalım.
𝑥0 = 0, 𝑥1 = 10, 𝑥2 = 20, 𝑥3 = 30, 𝑥4 = 40 𝑥5 = 50, 𝑥 6 = 60, 𝑥7 = 70, 𝑥8 = 80, 𝑥9 = 90, 𝑥10 = 100
seçelim
ve 𝜑(𝑥) başlangıç fonksiyonu yerine ona yakın olan Tablo 7.3 ile tanıtılan 𝑔(𝑥) üçüncü dereceden spline fonksiyonu kullanmak istiyoruz. Bu takdirde;
𝑣 0, 𝑥 = 𝑔 𝑥 ; 0 ≤ 𝑥 ≤ 100
Cauchy problemin 𝐺 üzerinde grafiğini çizmeliyiz. Bunun için de 𝑡0 = 0, 𝑡1 = 10, 𝑡2 = 20, 𝑡3 = 30, 𝑡4 = 40
𝑡5 = 50, 𝑡6 = 60, 𝑡7 = 70, 𝑡8 = 80, 𝑡9 = 90, 𝑡10 = 𝑇 = 100
seçerek programımızı çalıştırıyoruz. Oluşan yüzeyin görüntüsü Şekil 7.5 de görülmektedir.
Tablo 7. 3
ġekil 7. 5
Bu örnekte, çözüm bölgesi üzerinde grafiği gösterilen problemi, Maple ile grafiğini göstermek istersek,
𝑋 0 10 20 30 40 50 60 70 80 90 100 (𝑥) 0 -6.43 -11.72 -15.11 -16.60 -16.24 -14.08 -10.20 -4.65 2.51 11.26 ′(𝑥) 0 -0.62 -0.43 -0.24 -0.05 0.12 0.30 0.47 0.63 0.79 0.95 0 100 100 -16.60
Maple da PDETools paketinde yer alan standart çözüm araçlarıyla Bir Cauchy problemi (Başlangıç değer problemi) yerine, sınır değer problemi olarak ele almak zorunda kalırız. Maple da paralel kenar üzerinde değil, bir
𝐷 = 𝑡, 𝑥 , 0 < 𝑡 < 100,0 ≤ 𝑥 ≤ 100 dikdörtgen üzerinde çözüm aranır ve grafiği çizilir.
ġekil 7. 6
Bunun için (7.1) problemi yerine
𝑢 𝑡 𝑡, 𝑥 + 0.5𝑢 𝑥 𝑡, 𝑥 , 𝑡, 𝑥 ∈ 𝐷;
𝑢 0, 𝑥 = 𝜑 𝑥 = 2𝑥1.45− 2.5𝑥1.4, 0 ≤ 𝑥 ≤ 100
𝑢 𝑡, 0 = 0, 0 ≤ 𝑡 ≤ 100
almak zorundayız. Başlangıç ve sınır problemimi için Maple komut sistemine uygun olarak verildikten sonra, oluşan görüntü Şekil 7. 6 da verilmiştir.
8. DEĞERLENDĠRME ve SONUÇ
t-hiperbolik denklemleri, uygulamalarda sıkça karşımıza çıkar. Örneğin akustik denklemleri bununla ilgilidir.
𝑢 (𝑡, 𝑥) 𝑣𝑒 𝑝(𝑡, 𝑥) fonksiyonlar için 𝑡, 𝑥 reel sayıları tararken 𝜕𝑢 𝜕𝑡 + 1 𝜌0 𝜕𝑝 𝜕𝑥 = 0 (8.1) 𝜕𝑝 𝜕𝑡 + 𝜌0𝑐02 𝜕𝑢 𝜕𝑥 = 0 (8.2)
denklemlere akustik denklemleri denir (Godunov 1976 ve 1979). Burada 𝜌0, 𝑐0 pozitif fiziksel parametrelerdir.
𝜕𝑢 𝜕𝑡 + 1 𝜌0 𝜕𝑝 𝜕𝑥 = 0 1 𝜌0𝑐02 𝜕𝑝 𝜕𝑡 + 1 𝜌0 𝜕𝑢 𝜕𝑥 = 0 denklemleri (8.1) ve (8.2) denklemlerine denktir.
𝐴 = 10 01 𝜌0𝑐02 ; 𝐵 = 0 1 𝜌0 1 𝜌0 0 , 𝑣 𝑡, 𝑥 = 𝑢 (𝑡, 𝑥)𝑝(𝑡, 𝑥) seçilirse akustik denklemleri
𝐴𝑣𝑡 𝑡, 𝑥 + 𝐵𝑣𝑥 𝑡, 𝑥 = 0 (8.3)
matris vektör şeklini alır. Burada 𝐴 ve 𝐵 simetrik iki boyutlu matrisler ve 𝐴 pozitif tanımlıdır;
𝐴 = 𝐴𝑇 > 0; 𝐵 = 𝐵𝑇.
(8.3) denklemi, 𝐴 ve 𝐵 simetrik 𝑁 boyutlu matrisler ve 𝐴 pozitif tanımlı olması durumunda t-hiperbolik denklemi olarak bilinmektedir. (Godunov 1976 ve 1979).
𝜑𝑗: 𝛼, 𝛽 → 𝑅 türetilebilen fonksiyonlar, 𝑗 = 1,2, … , 𝑁 olmak üzere
t-hiperbolik denklemlerin Cauchy problemi
𝑢 0, 𝑥 = 𝜑 𝑥 , 𝑥 ∈ [𝛼, 𝛽] ,
matris-vektör şeklinde verilebilir. Burada Ω karakteristik üçgenidir, örneğin Godunov (1979) da görülebilir. Bu problem ise 𝐸𝑉𝐷 (Ö𝑧𝑑𝑒ğ𝑒𝑟 𝐴𝑦𝑟ışı𝑚ı) (örneğin, Bulgak ve Bulgak (2001) de özdeğer ayrışımından sözedilmiştir) kullanarak 𝑁 adet tek boyutlu Cauchy problemine indirilir.
Gerçekten , aşağıdaki işlemleri yaptığımızda;
1. 𝐴 pozitif tanımlı simetrik matrisinin 𝐸𝑉𝐷 ayrışımı.𝐴 = 𝑄𝐷𝑄𝑇 Burada 𝐷 köşegen pozitif elemanlı bir matris ve 𝑄 ortogonal bir matristir 𝑄𝑄𝑇 = 𝐼 .
2. 𝐶 = 𝐷−1/2𝑄𝑇𝐵𝑄𝐷−1/2 simetrik bir matris.
3. 𝐶 simetrik matrisinin 𝐸𝑉𝐷 ayrışımı, 𝐶 = 𝑃𝑆𝑃𝑇 . Burada S köşegen bir matris ve P ortogonal bir matristir (𝑃𝑃𝑇 = 𝐼).
4. 𝐹 𝑥 = 𝑃𝑇𝐷1/2𝑄𝑇𝜑(𝑥)
ise, verilen t-hiperbolik denklemi 𝑁 tane basit hiperbolik problemlerin Cauchy problemlerine ayrılır; ( 𝑗 = 1, 2, ⋯ , 𝑁 ) 𝜕𝑧𝑗(𝑡, 𝑥) 𝜕𝑡 + 𝑠𝑗 𝜕𝑧𝑗(𝑡, 𝑥) 𝜕𝑥 = 0; (𝑡, 𝑥) ∈ Ω 𝑧𝑗 0, 𝑥 = 𝐹𝑗 𝑥 ; 𝑥 ∈ [𝛼, 𝛽] olur. 5. 𝑢 𝑡, 𝑥 = 𝑄𝐷−1/2𝑃𝑧(𝑡, 𝑥)
9. KAYNAKLAR
Aydın K. , Bulgak A. , Bulgak H. , 2003. Bilgisayarla Matematik Analiz, Sel-Ün Vakfı Yayınları, Konya, ISBN 975-6652-228
Bartels R.H. , Beatty J.C. , Barsky B. A. , 1987. An Introduction To Splines For Use in Computer Graphis & Geometric Modeling, Morgan Kaufmann Publishers, ISBN 1-55860-400-6
Bulgak A. , Bulgak H. , 2001. Lineer Cebir, Sel Ün Vakfı Yayınları, Konya, ISBN 975-6652-18-7
Bulgak A. , Eminov D. , 2003. Graphics Constructor 2.0 Selçuk J. Appl. Math. 2003 v. 4, n.1, Konya, ISSN 1302-7980, pp 42-57
Bulgak A. , Eminov D. , 2003. Cauchy Solver Selçuk J. Appl. Math. 2003 v. 4, n.2, Konya, ISSN 1302-7980, pp 13-22
Chibisov D. , Ganzha V. G. , Zenger C. , 2003. Object oriented finite element
calculation using Maple, 2003 Selçuk J. Appl. Math. v. 4, n.1 Konya, ISSN 1302-7980, pp 58-86
Cohen E. , Riesenfeld R.F. , Elber G. , 2001. Geometric Modeling with Splines, A K Peters Ltd. ISBN 1-56881-137-3
Fiume E. L. , 1989. The Mathematical Structure of Raster Graphics, Academic Press, ISBN 0-12-257960-7
Godunov S.K. , Zabrodin A.B. , Ivanov M.Ya. , Kraiko A. N. , 1976. Çok Boyutlu Gaszodinamik Problemlerin Sayısal Çözümü, Nauka, Moskova (Rusça)
Godunov S.K. , 1979. Matematiksel Fizik Denklemleri, Nauka, 2. baskı Moskova, (Rusça)
Ganzha V.G. , Vorozhtsov E.V. , 1996. Computer-Aided Analysis of Difference
Schemes for Partial Differential Equations, John Wiley&Sons. Inc., ISBN 0-471-12946-1 New York.
Ganzha V.G. , Liska R. , Shashkov M. , Zenger C. , 2002. Support operator method for Laplace equation on unstructured triangular grid, Selçuk J. Appl. Math. v.3, n.1, Konya, ISSN 1302-7980, pp 21-48
Hammerlin G. , Hoffmann K. H. , 1991. (Translated by Shumaker L.L.) Numerical Mathematics, Springer ISBN 0-387-97494-6
Hearn D. , Baker M.P. , 1986. Computer Graphics, Prentice Hall, NewJersey, ISBN 0-13-165382-2
Huckle T. , Stadaucher J. , 2002. A new order preconditioner for high resolution image reconstruction with multisensors, Selçuk J. Appl. Math. v. 3, n.2, Konya, ISSN 1302-7980, pp 49-64
Liska R., Shashkov M. ve Swartz B. , 2002. Locally exact smooth reconstruction of lines, circles, planes, cylinders and cones by blending successive circular interpolants, Selçuk J. Appl. Math. v. 3, n.2, Konya, ISSN 1302-7980 pp 81-98 Montague J. , 1998. Basic Perspective Draving, Third Edition, John Wiley & Sons Inc. , New York, ISBN 0-471-29231-1
Newman W.M. , Sproull R. F. , 1979. Principles of Interactive Computer Graphics, McGraw-Hill, Tokyo, ISBN 0-07-046338
Spath H. , 1995. Two Dimensional Spline Interpolation Algorithms, A K Peters Ltd, Wellesley, ISBN 1-56881-017-2
Schumaker L.L. , 2007. Spline Functions Basic Theory, Cambridge Mathematical Library, Cambridge University Press, ISBN 978-0-521-70512-7
Shewchuk J. R. , 1994. An Indroduction to the Conjugate Gradient Method Without the Agonizing Pain , School of Computer Science Carnegie Mellon University Pittsburgh
EK-A GENEL ÇĠZĠM YÖNTEMLERĠ
Üç boyutlu görüntü oluşturmada, çeşitli teknikler kullanılmaktadır. Genel olarak iki ana görüntüleme usulü vardır. Montague (1998) bu görüntüleme usullerini açıklamıştır.
a. Paraline Usulü Görüntüleme: Bu görüntüleme usulünün temel prensibi, aynı doğrultudaki bütün çizgilerin paralel olmasıdır(Şekil Ek-A.1). Resmin hızlı ve ölçekli çizilmesini sağlar, Üç boyutlu imajların bazı kısımlarının etkileyici bir şekilde öne çıkmasını sağlar. Özellikle teknik resim çizimlerde kullanılan yöntemdir.
Paraline usulü görüntülemede üç farklı projeksiyon vardır.
Ortografik (Doğrusal) Projeksiyon: Bütün çizgilerin geriye doğru aynı açı ile çizilmesi durumudur(Şekil Ek-1. 2).
Aksonometrik ( Ġsometrik) Projeksiyon: Verilen açıların kombinasyonu temel alınarak çizimin yapılması durumudur(Şekil Ek-A. 3).
ġekil Ek-A. 2 ġekil Ek-A. 1
120°
Eğik Projeksiyon: Çizimin yükseltilerek eğimli çizilmesi durumudur(Şekil Ek-1. 4)..
b. Perspektif Usulü Görüntüleme: Perspektif usulü görüntüleme modelin olduğu gibi, doğal haliyle görüntülenmesi sağlanır. Nesneler uzaklaştıkça daha küçük görünürler(Şekil Ek-A. 5).
Geliştirilen yazılımda, bilgisayarda görüntü işlemeye en uygun yöntem olan perspektif yöntemi kullanıldı.
ġekil Ek-A. 5
EK-B ÜÇ BOYUTLU DÖNÜġÜMLER VE PERSPEKTĠF
Üç boyutlu perspektif görüntünün oluşturulmasında geometrik dönüşümler önemli rol oynar. Geometrik dönüşümler, nesnelerin birbirlerine göre yerini tanımlamada ve üç boyutlu uzayın iki boyutlu ekran uzayına aktarılmasında kullanılır. Newman (1979) perspektif görüntünün oluşturulmasında ihtiyaç duyulan bazı dönüşümleri vermiştir. Bu dönüşümler:
Bir noktayı (𝑥, 𝑦, 𝑧) , yeni bir noktaya (𝑥′, 𝑦′, 𝑧′) öteleme
𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 1 0 0 0 0 1 0 0 0 0 1 0 𝑇𝑥 𝑇𝑦 𝑇𝑧 1
Burada; 𝑇𝑥, 𝑇𝑦 𝑣𝑒 𝑇𝑧 𝑥, 𝑦 𝑣𝑒 𝑧 yönlerinde taşıma büyüklüğüdür.
Bir noktayı (𝑥, 𝑦, 𝑧) , 𝑧 ekseni etrafında 𝜃 açısı kadar çevirmek için işlemler,
Bir noktayı (𝑥, 𝑦, 𝑧), 𝑦 ekseni etrafında 𝜃 açısı kadar çevirmek için işlemler,
𝑧 𝑦 𝑥 𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 𝑐𝑜𝑠𝜃 0 𝑠𝑖𝑛𝜃 0 0 1 0 0 −𝑠𝑖𝑛𝜃 0 𝑐𝑜𝑠𝜃 0 0 0 0 1 ġekil Ek-B. 2 𝑧 𝑦 𝑥 𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 𝑠𝑖𝑛𝜃 𝑐𝑜𝑠𝜃 0 0 −𝑐𝑜𝑠𝜃 𝑠𝑖𝑛𝜃 0 0 0 0 1 0 0 0 0 1 ġekil Ek-B. 1
Bir noktayı (𝑥, 𝑦, 𝑧) , 𝑥 ekseni etrafında 𝜃 açısı kadar çevirmek için işlemler,
Bir noktayı 𝑥, 𝑦, 𝑧 , yeni bir ölçek ile göstermek için işlemler,
𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 𝑆𝑥 0 0 0 0 𝑆𝑦 0 0 0 0 𝑆𝑧 0 0 0 0 1
Burada, 𝑆𝑥, 𝑆𝑦 𝑣𝑒 𝑆𝑧 𝑥, 𝑦 𝑣𝑒 𝑧 yönlerinde ölçek büyüklüğüdür. Bir noktayı (𝑥, 𝑦, 𝑧) , 𝑦0𝑧 düzlemine göre yansıması
𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 −1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1
Bir noktayı (𝑥, 𝑦, 𝑧) , 𝑥0𝑧 düzlemine göre yansıması
𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 1 0 0 0 0 −1 0 0 0 0 1 0 0 0 0 1
Bir noktayı (𝑥, 𝑦, 𝑧), 𝑦0𝑥 düzlemine göre yansıması
𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 1 0 0 0 0 1 0 0 0 0 −1 0 0 0 0 1
Bu dönüşümler kullanılarak, bilgisayar ekranında üç boyutlu görüntüler oluşturulmuştur. 𝑧 𝑦 𝑥 𝑥′, 𝑦′, 𝑧′, 1 = 𝑥, 𝑦, 𝑧, 1 1 0 0 0 0 𝑐𝑜𝑠𝜃1 −𝑠𝑖𝑛𝜃0 0 0 𝑠𝑖𝑛𝜃0 𝑐𝑜𝑠𝜃1 0 0 0 0 1 ġekil Ek-B. 3