UYDU RADAR GÖRÜNTÜLERĐNDEN ÜÇ BOYUTLU SAYISAL ARAZĐ
MODELĐN ÜRETĐLMESĐ
Mehmet Hakan KÖSE YÜKSEK LĐSANS TEZĐ JEODEZĐ VE FOTOGRAMETRĐ
ANABĐLĐM DALI Konya, 2006
FEN BĐLĐMLERĐ ENSTĐTÜSÜ
UYDU RADAR GÖRÜNTÜLERĐNDEN ÜÇ BOYUTLU SAYISAL ARAZĐ MODELĐN ÜRETĐLMESĐ
MEHMET HAKAN KÖSE
YÜKSEK LĐSANS TEZĐ
JEODEZĐ VE FOTOGRAMETRĐ ANABĐLĐM DALI
Bu tez 14 / 07 / 2006 tarihinde aşağıdaki jüri tarafından oy birliği/oyçokluğu ile kabul edilmiştir.
Prof. Ömer Halis Tombaklar Yrd.Doç.Dr.Ayhan Ceylan
(Danışman) (Üye)
Yrd.Doç.Dr.Aydın Üstün
i T.C
SELÇUK ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ
UYDU RADAR GÖRÜNTÜLERĐNDEN ÜÇ BOYUTLU SAYISAL ARAZĐ MODELĐN ÜRETĐLMESĐ
MEHMET HAKAN KÖSE
YÜKSEK LĐSANS TEZĐ
JEODEZĐ VE FOTOGRAMETRĐ ANABĐLĐM DALI KONYA, 2006
ii
ÖZET
Yüksek Lisans Tezi
UYDU RADAR GÖRÜNTÜLERĐNDEN ÜÇ BOYUTLU SAYISAL ARAZĐ MODELĐN ÜRETĐLMESĐ
MEHMET HAKAN KÖSE
SELÇUK ÜNĐVERSĐTESĐ FEN BĐLĐMLERĐ ENSTĐTÜSÜ JEODEZĐ VE FOTOGRAMETRĐ ANABĐLĐM DALI
Danışman: Prof. Ömer Halis TOMBAKLAR
2006, 78 Sayfa
Jüri: Prof. Ömer Halis TOMBAKLAR
Yrd.Doç.Dr.Ayhan CEYLAN Yrd.Doç.Dr.Aydın ÜSTÜN
Sayısal Arazi Modeli genel olarak, yeryüzünün bilgisayarda yapılacak işlemlere esas olmak üzere, sayısal olarak temsil edilmesidir. Günümüzde, maden, harita, jeoloji ve inşaat gibi bilim dallarında yapılan çalışmalarda kullanılmaktadır.
Sayısal Arazi Modeli, yersel veya fotogrametrik ölçümlerle veya haritaların sayısallaştırması yoluyla toplanan verilerin bilgisayar ortamında değerlendirilmesiyle elde edilmektedir. Ancak günümüzde bu şekilde üretimin yanısıra, Sentetik Açıklıklı Radar (SAR) görüntülerinin bilgisayar ortamında değerlendirilmesi suretiyle de Sayısal Arazi Modeli üretimi yapılabilmektedir.
Sentetik Açıklıklı Radar (SAR) görüntülerinden Sayısal Arazi Modeli (SAM) doğrudan elde edilemez. Bu görüntülerden, öncelikle Sayısal Yükseklik Modeli (SYM) elde edilir. Ardından bu SYM kullanılarak SAM üretmek için gerekli olan dayanak noktalarının koordinatları (x, y, z) elde edilir. Daha sonra bu koordinatlar kullanılarak bilgisayar ortamında SAM elde edilir.
Anahtar Kelimeler: Radar, sayısal arazi modeli, sayısal yükseklik modeli, yapay
iii
ABSTRACT
MS Thesis
THREE DIMENSIONAL DIGITAL TERRAIN MODEL GENERATING OF THE SATELLITE RADAR IMAGES
MEHMET HAKAN KÖSE
GRADUATE SCHOOL OF NATURAL AND APPLĐED SCĐENCES DEPARMENT OF GEODESY AND PHOTOGRAMETRY
Supervisor: Prof. Ömer Halis TOMBAKLAR
2006, 78 Page
Jury : Prof. Ömer Halis TOMBAKLAR
Assoc.Prof.Dr.Ayhan CEYLAN Assoc.Prof.Dr.Aydın ÜSTÜN
Digital Terrain Model, in general, represents a part of the earth quantitatively to form a basis for the computer processing. Currently, this model is used for scientific studies in areas such as, natural resources, mapping, geology, and construction. Digital Terrain Model can be obtained by evaluating data on computers, which are compiled by local or photogrametric method, or digitaling of maps. However, at present, in addition to this production method, Digital Terrain Models can also be produced by evaluating Synthetic Aperture Radar (SAR) images by computers. Digital Terrain Model cannot be obtained directly from Synthetic Aperture Radar images. First, these images can be used to obtain Digital Evelation Model (DEM). Second, by using this Digital Evelation Model, support point coordinates (x, y, z) can be found that is required to produce Digital Terrain Model. Then, Digital Terrain Models can be produced by computers by using these coordinates.
Key Words: Radar, digital terrain model, digital evelation model, synthetic aperture
iv
TEŞEKKÜR
Bu çalışmada, tez danışmanlığımı üstlenen ve çalışmanın her aşamasında bilgi ve deneyimleriyle bana yol gösteren sayın hocam Prof. Ömer Halis Tombaklar’a teşekkür ederim. Ayrıca bu yüksek lisans tez çalışması boyunca benden bilgilerini ve ilgisini esirgemeyen sayın Yrd.Doç.Dr.Özşen Çorumluoğlu’na da teşekkürü bir borç bilirim.
Ayrıca çalışmam sırasında benden maddi ve manevi yardımlarını esirgemeyen aileme ve harita mühendisleri Kaan Tunca ile Erdal Gürlek’e de teşekkürü bir borç bilirim.
Mehmet Hakan KÖSE
v ĐÇĐNDEKĐLER Sayfa ÖZET... ii ABSTRACT ... iii TEŞEKKÜR ... iv KISALTMALAR ... vii SĐMGE LĐSTESĐ... ix ŞEKĐL LĐSTESĐ ... x
ÇĐZELGE LĐSTESĐ ... xii
1. GĐRĐŞ... 1
2. UZAKTAN ALGILAMA ... 4
2.1 Elektromanyetik Spektrum... 5
2.2 Uzaktan Algılamayı Etkileyen Faktörler... 8
2.2.1 Atmosferik etkenler... 9
2.2.2 Yeryüzünün etkileri... 9
2.3 Uzaktan Algılamada Sensör Sistemleri... 11
2.4 Uzaktan Algılama Platformları ... 12
2.4.1 Uzay platformları ... 13
2.5 Uzaktan Algılamada Görüntü Özelliklerini Etkileyen Faktörler ... 16
2.5.1 Piksel ... 16
2.5.2 Tarama genişliği ... 17
2.5.3 Band ... 17
2.5.4 Çözümleme... 18
3. RADAR SĐSTEMLERĐ ... 20
3.1 Radar Görüntüleme ve Özellikleri ... 20
3.1.1 Frekans etkisi... 21
3.1.2 Polarizasyon ... 22
3.1.3 Pürüzlülük etkisi ve yüzeyin geometrik yapısı ... 23
3.1.4 Yansıyan sinyallerin geliş açısı ... 23
3.1.5 Nemlilik etkisi ... 24
3.2 Radar Görüntüleme Sistemleri ... 24
3.2.1 Gerçek açıklıklı radarlar... 25
vi
3.3 SAR Görüntülerinden Sayısal Yükseklik Modeli (SYM)
Oluşturulmasında Kullanılan Yöntemler ... 30
3.3.1 Stereoskopi yöntemi ... 31
3.3.2 Radar Đnterferometri yöntemi... 33
3.4 Radar Görüntülemede Karşılaşılan Etkiler ... 34
3.5 Günümüzde Kullanılan Bazı Radar Uyduları Ve Özellikleri... 36
3.5.1 Radarsat ... 37
3.5.2 ERS (European Remote Sensing Satellite)... 41
3.5.2.1 ERS görüntü ürünleri ... 44
3.5.3 Envisat (European Enviropment Satellite)... 44
3.5.3.1 Gelişmiş yapay açıklık radarı ... 45
3.5.3.2 Orta çözünürlüklü görüntüleme spektrometresi (MERĐS) ... 47
3.5.3.3 Envisat ASAR görüntü ürünleri ... 47
4. SAYISAL ARAZĐ MODELĐ ... 50
4.1 Sayısal Arazi Modelinin Oluşturulması ... 50
4.2 Sayısal Arazi Modeli Üretiminde Kullanılan Enterpolasyon Yöntemleri52 4.2.1 Noktasal enterpolasyon ... 53
4.2.2 Parça parça fonksiyonlarla enterpolasyon... 53
4.2.3 Tüm alanı kapsayan tek bir fonksiyonla enterpolasyon ... 54
4.3 Sayısal Arazi Modellemede Kullanılan Yöntemler ... 54
4.3.1 Grid yöntemi ... 54
4.3.2 Üçgen yöntemi ... 55
5. UYGULAMA... 57
5.1 Koordinat Sistemleri ... 59
5.2 SYM Elde Edilmesi... 61
5.3 Sayısal Arazi Modeli Đçin Veri Toplama ... 64
5.4 Sayısal Arazi Modelinin Elde Edilmesi ... 64
5.5 Sayısal Arazi Modelinin Doğruluğunun Araştırılması... 67
6. SONUÇ ve ÖNERĐLER... 73
KAYNAKLAR ... 76
vii
KISALTMALAR
ASAR : Advanced Synthetic Aperture Radar ATSR : Along Track Scanning Radiometer
CAD : Computer Aided Design
CAM : Computer Aided Mapping
CBS : Coğrafi Bilgi Sistemleri DEM : Digital Evelation Model DTM : Digital Terrain Model
EME : Elektromanyetik Enerji
EMR : Elektromanyetik Radyasyon
ENVISAT : European Enviropment Satellite ERS-1 : European Remote Sensing - 1 ERS-2 : European Remote Sensing - 2
ESA : European Space Agency
GCP : Ground Control Points
GPS : Global Positioning System InSAR : Đnterferometrik SAR
ĐR : Đnfrared
MERIS : Medium Resolution Imaging Specrometer RADAR : Radio Detection And Ranging
RAR : Real Aperture Radar
SAM : Sayısal Arazi Modeli
SAR : Synthetic Aperture Radar
SHF : Super High Frequency
SLAR : Side Looking Airbone Radar
SYM : Sayısal Yükseklik Modeli
TIN : Triangulated Đrregular Network
viii
UHF : Ultra High Frequency
WGS84 : World Geodetic System 84
ix SĐMGE LĐSTESĐ c : Işık Hızı f : Frekens λ : Dalga Boyu raz : Azimut Çözünürlüğü
R : Anten ile Yeryüzü Arası Eğik Uzunluk
β : Işın Genişliği γ : Bakış Açısı G : Yer Menzili S : Eğimli Menzil θ : Bakış Açısı h : Yükseklik r : Eğik Uzunluk s : Eğik Mesafe
y : Yer (Arazi) Mesafesi H : Radar Anteninin Yüksekliği
x
ŞEKĐL LĐSTESĐ
Sayfa
Şekil 2.1 Transversal dalga (URL1)... 5
Şekil 2.2 Elektromanyetik spektrum ve kullanılan bölgeleri (URL2) ... 6
Şekil 2.3 Elektromanyetik spektrumda kızılötesi enerji bölgesi ... 7
Şekil 2.4 Bir bitkide gelen ışın (I), emme (A), geçirme (T) ve yansıma (R) (Đşlem 2000)... 10
Şekil 2.5 Pasif sensörün çalışma metodu (Đşlem 2000)... 11
Şekil 2.6 Aktif sensörün çalışma metodu... 12
Şekil 2.7a Ekvator yörüngeli uydu sistemleri (URL 15)... 14
Şekil 2.7b Kutup yörüngeli uydu sistemleri (URL 15) ... 14
Şekil 2.7c Eğik (oblik) yörüngeli uydu sistemleri ... 15
Şekil 2.8 Piksellerin gösterimi (URL 16)... 16
Şekil 2.9 Tarama genişliği ... 17
Şekil 2.10 Tayfsal çözümleme ... 18
Şekil 3.1 Ormanlık alanda X bandının kullanılması ... 22
Şekil 3.2 Ormanlık alanlarda L bandının kullanılması ... 22
Şekil 3.3. Neme bağlı olarak radar sinyallerinin su ve toprak ortamında yansıması . 24 Şekil 3.4 Işın genişliği (β) ve azimut çözünürlüğü (raz) ... 26
Şekil 3.5 Arazi noktasının görüntülenmesi ... 27
Şekil 3.6 Eğik mesafeler ... 28
Şekil 3.7 Radarın yeryüzünü görüntülemesi (Akabalı 2002)... 29
Şekil 3.8 Eğik mesafe ve yer mesafesi... 29
Şekil 3.9 Eğik mesafe ve yer mesafesi arasındaki ilişki ... 30
Şekil 3.10 Stereoskopi yönteminin SAR tekniğindeki uygulaması ... 32
Şekil 3.11 Eğik menzil ve yer menzilinin gösterimi ... 33
Şekil 3.12 Uzunluk kısalması etkisi ... 35
Şekil 3.13 Yerdeğiştirme etkisi ... 35
Şekil 3.14 Gölgeleme etkisi ve bu etki ile ilgili bir görüntü örneği... 36
Şekil 3.15 Radarsat-1, Radarsat-2 ve ERS uydularında polarizasyon (URL18) ... 38
Şekil 3.16 Radarsat (URL 17)... 39
xi
Şekil 3.18 ERS-1 uydusu (URL13)... 42
Şekil 3.19 ERS-2 uydusu (URL13)... 42
Şekil 3.20 Envisat uydusu (URL4) ... 45
Şekil 3.21 ASAR görüntü modu (URL6)... 46
Şekil 3.22 ASAR değişken polarizasyon modu (URL6) ... 46
Şekil 3.23 ASAR geniş şerit modu (URL6)... 47
Şekil 4.1 Sayısal arazi modeli (SAM) oluşum süreci ... 51
Şekil 4.2 Grid yöntemi ile oluşturulmuş ağ (Çetiner 1994) ... 55
Şekil 4.3 Üçgen yöntemi ile oluşturulmuş ağ (Çetiner 1994)... 56
Şekil 5.1a Referans görüntü ... 58
Şekil 5.1b Eşlenik görüntü ... 58
Şekil 5.2 ASAR görüntülüerinin konumları... 59
Şekil 5.1 Yer sabit koordinat sistemi ... 60
Şekil 5.2 Radar görüntülerinden elde edilen SYM ... 63
Şekil 5.3 Dayanak noktaları ve belirlenen bölgenin Netcad ekranındaki görüntüsü . 65 Şekil 5.4 Belirlenen alan SYM üzerindeki görüntüsü ve konumu... 65
Şekil 5.5a Elde edilen üçgen modelin ekrandaki görüntüsü ... 66
Şekil 5.5b Elde edilen üçgen modelin ekrandaki üç boyutlu görüntüsü ... 66
Şekil 5.6 10 m aralıklı eşyükseklik eğrileri... 67
Şekil 5.7 Dayanak noktaları ve seçilmiş bölgenin Netcad ekranındaki görüntüsü .... 68
xii
ÇĐZELGE LĐSTESĐ
Sayfa
Çizelge 2.1 Görünür bölgedeki renkler ve bunlara ait dalga boyları ... 7
Çizelge 2.2 Landsat 7 uydusunun algılama yaptığı bantlar ve dalga boyları... 19
Çizelge 3.1 Radarsat ışın demet ve çözünürlükleri ... 40
Çizelge 3.2 ERS-1 ve ERS-2’ye ait özellikler ... 43
Çizelge 3.3 Envisat ASAR görüntü ürünlerinin sınıflandırılması ... 49
Çizelge 5.1 Kullanılan stereo ASAR görüntülerinin bazı özellikleri... 57
Çizelge 5.2 “z” koordinat değerlerinin farkları... 69
1. GĐRĐŞ
Bilimsel bir araştırmanın temel kaynağı veridir. Her türlü araştırma için gerekli bilgiye, elde edilen verilerin belirli bir sistem içerisinde analizi ve yorumlanması sonucu ulaşılır (Demirel 2002). Yakın zamana kadar bilgiye klasik yollardan ulaşılırken, günümüzün gelişen teknolojisi ve insanoğlunun düşünce ufuklarının genişlemesi sonucu, bilgiye ulaşım da uzaktan algılama teknolojisi ile yeni bir boyut kazanmıştır. Önceleri uçaklarla geniş alanlar görüntülenirken, 1960’dan sonra uzaya fırlatılan uydulara yerleştirilmiş algılayıcılarla çok hızlı ve daha geniş alanların görüntülenmesi sağlanmıştır.
Uzaktan algılamada kullanılan ve uydulara yerleştirilmiş elektro-optik sensörler, yeryüzünden yansıyan güneş ışınlarını algılamak suretiyle yeryüzünün görüntüsünü elde ederler. Bu nedenle güneş olduğu zamanlarda, yani gündüzleri algılama yaparlar. Geceleri, bulutlu ve sisli havalarda bu sensörler (algılayıcılar) çalışamazlar.
Elektro-optik algılayıcıların algılama yapamadığı durumlar için yapay açıklıklı radar (SAR) sistemleri geliştirilmiştir. Bu sistemler günün her saatinde ve her türlü hava koşulunda çalışabilmektedir.
Radar sistemlerinin aktif bir sistem olması nedeniyle kesintisiz gece ve gündüz gözlem yapabilme kapasitesi, değişken frekanslar kullanarak ilgilenilen detayın farklı özelliklerini ortaya çıkarabilme özelliği gibi bir çok üstünlükleri vardır. Bu üstünlükler radar sistemlerinin çok değişik uygulama alanlarında kullanımına imkan sağlamış ve vazgeçilemeyecek bir veri kaynağı olmuştur (Demirel 2002).
SAR, uçak veya uydular üzerine yerleştirilen ve ışıması sonucu yeryüzündeki nesnelere radar sinyalleri gönderen ve geri gelen sinyalleri algılayan bir radar sistemidir. Đşlem, SAR cihazının yeryüzüne radar sinyalleri göndermesi sonucu bu sinyallerin yeryüzündeki cisimlerle etkileşerek yansıtılıp veya emilmesi ile başlar. SAR cihazına geri dönen sinyaller yardımı ile yeryüzüne ait görüntü elde edilmeye çalışılır.
ve gözlenmesi zor alanlarda yükseklik verisi elde etmektir (Akabalı 2002). Buna bağlı olarakta geniş alanların SAM’ı üretilebilmektedir. Ancak SAR görüntülerinin düşük çözünürlükte olması, yani piksel kenar uzunluğunun temsil ettiği arazideki uzunluğunun büyük olması (12.5, 25 metre gibi) , daha fazla detay görüntüleme ihtiyacı olan uygulamalarda kullanımı zorlaştırmaktadır. Bu da yapay açıklıklı radar (SAR) sistemleri için bir dezavantaj olarak kabul edilebilir.
Yapılan bu tez çalışmasının amacı, günümüzde hizmet veren radar uydularından elde edilen stereo SAR görüntülerini kullanmak suretiyle SAM elde edilmesi ve elde edilen bu SAM’ın haritacılık uygulamalarında kullanılabilir olup olmadığının araştırılmasıdır. Ancak SAR görüntülerinden doğrudan SAM elde edilmesi mümkün değildir.
Bu nedenle tez çalışmasında, SAR görüntülerinden stereoskopik yöntemle SYM üretilmiş ve bu SYM üzerinden otomatik olarak nokta koordinatları elde edilmiştir. Bu noktalardan yararlanılarak, belirlenen bir alanın SAM’ı, üçgenleme yoluyla üretilmiş ve üretilen bu model üzerinden 10 m aralıkla eşyükseklik eğrileri geçirilmiştir. Daha sonra, yine SYM üzerinden elde edilen noktalardan yararlanarak, belirlenen başka bir alanın SAM’ı elde edilmiş ve doğruluk kontrolu yapılmıştır.
Tez çalışmasında SYM’den, sadece nokta koordinatları elde edilmesinde faydalanılmıştır. Ancak eğrilerin geçirilmesi ve doğruluk kontrolünde SAM kullanılmıştır.
Çalışmanın ikinci bölümünde; kullanılan kavramların daha iyi anlaşılabilmesi amacıyla uzaktan algılama konusu ile ilgili genel bilgilere yer verilmiştir.
Üçüncü bölümde ise, radar görüntüleme ve özellikleri, radar görüntüleme sistemleri, SAR görüntülerinden SYM oluşturmak için kullanılan stereoskopi ve interferometri yöntemleri, radar görüntülemede karşılaşılan etkiler ve günümüzde kullanılan radar uydularının özellikleri hakkında bilgilere yer verilmiştir.
Dördüncü bölümde, sayısal arazi modelinin tanımı, SAM için veri elde edilme yöntemleri, enterpolasyon ve modelleme yöntemleri anlatılmaktadır.
üretilmesi, elde edilen SAM üzerinden 10 m aralıkla eşyükseklik eğrileri geçirilmesi ve elde edilen başka bir SAM için doğruluk kontrolünün yapılması anlatılmıştır.
2. UZAKTAN ALGILAMA
Uzaktan algılama; yeryüzünden belirli uzaklıklara, atmosfer yada uzaya yerleştirilen platformlara monte edilmiş ölçüm aletleriyle yeryüzünün doğal ve yapay objeleri konusunda bilgi alma ve değerlendirme tekniğidir (Sesören 1999).
Bir başka ifadeyle, yeryüzüne fiziksel bir temas olmadan cisimlerin gözlenmesi ve ölçülmesine ilişkin bilgi sağlayan bir bilimdir.
Bu bilgi; yansıyan veya yayılan enerjinin algılanması ve analizi sonucunda elde edilmektedir. Günümüzde uzaktan algılama verisi, kameralar ve sensörler ile donatılmış uydular tarafından sağlanmaktadır.
Bugün yerküre çevresindeki çeşitli yörüngelerde bulunan uyduların algılayıcıları, amaçlarına göre elektromanyetik spektrumun değişik bölümleri aracılığı ile sağlanan bilgiyi sayısal olarak depolamaktadırlar. Çeşitli yer istasyonları tarafından sinyaller halinde alınıp kullanıcıların işleyebileceği duruma getirilen yeryüzü ile ilgili bu sayısal veriler, görüntü işleme ve analiz sistemlerinde değerlendirilirler (Hat 2002).
Uydulardan elde edilen görüntülerin;
• Uçaktan elde edilen görüntü maliyetinden daha ucuz olması,
• Süreklilik içermesi,
• Bilgisayar ortamında değerlendirilebilecek formatta (sayısal) olması,
• Neredeyse orta ve büyük ölçekli hava fotoğrafları niteliğinde olması
uzaktan algılamanın daha yaygın bir şekilde kullanımını destekleyen faktörler olarak sayılabilir (URL1).
Uzaktan algılama çalışmaları için en önemli enerji kaynağı Güneştir. Güneş enerjisi elektromanyetik dalgalar şeklinde yeryüzüne ulaşmaktadır. Bu dalgalar transversal dalgalar halinde yayılmaktadır. Yani oluşan bir dalgada, moleküller dalga hereketi yönüne dik açılar oluşturacak şekilde sallanmaktadır. Şekil 2.1’de bir transversal dalga şekli gösterilmektedir.
Şekil 2.1 Transversal dalga (URL1)
Dalga boyu (λ), bir dalga tepesi ile onu takip eden dalga tepesi arasındaki uzaklık, frekans (f) ise bir saniyede oluşan dalga sayısı veya birim zamanda bir noktadan geçen dalga tepe sayısıdır. Dalganın maksimum yüksekliğine de büyüklük adı verilmektedir.
c = f . λ (2.1)
dır. c yayılma hızı, sabit olduğundan (3x108 m/sn), verilen her dalga için λ dalga boyu ve f frekansı birbiriyle ters ilişkili olup, her iki terimden biri özel şekilde bir dalgayı tanımlamada kullanılabilir (Örüklü 1988).
2.1 Elektromanyetik Spektrum
Elektromanyetik spektrum; çeşitli dalga boylarındaki ışıksal enerjiyi içeren ve bu ışıksal enerjinin, içinde eletromanyetik dalgalar halinde serbestçe hareket ettiği bir ortam olarak tanımlanır. Elektromanyetik spektrum süreklidir. Ancak çalışmalarda kolaylık sağlanabilmesi için özellikleri gözönüne alınarak belirli bölümlere ayrılmıştır. Bu bölümler arasında kesin bir sınır yoktur ve yer yer çakışırlar (Sesören 1999). Elektromanyetik spektrum ve uzaktan algılamaya imkan sağlayan bölgeleri,
Şekil 2.2 Elektromanyetik spektrum ve kullanılan bölgeleri (URL2)
Elektromanyetik spektrumun bölümleri şu şekilde açıklanmaktadır:
Gamma (γ) – ışını: λ < 0.03 nm dalga boyundaki elektromanyetik enerji türüdür.
Güneşten bu dalga boylarında gelen enerjinin tümü atmosfer tarafından yutulur. Ancak yüksek irtifa balonları veya uydular tarafından bu ışınlar kaydedilebilmektedirler. Radyoaktif minerallerin yaymış olduğu bu ışın alçaktan uçan uçaklarla tespit edilebilmektedir. λ ışını Uzaktan Algılama için önemsizdir (URL2).
X – ışını: 0.03 nm < λ < 3 nm dalga boyunda ki elektromanyetik enerji türüdür.
Uzaktan algılama için önemsizdir, atmosfer tarafından tamamı yutulur, tıpta kullanılır.
Ultraviyole (Morötesi): Kısaca UV bölgesi, 3 nm < λ < 0.4 µm dalgaboyunda yer
almakta ve uzaktan algılamaya olanak sağlamaktadır. 0.3 µm’den daha kısa dalga boylu kısmı ozon tabakası tarafından yutulur. Bu nedenle ,0.3 µm < λ < 0.4 µm kısmı kullanılmakta ve fotografik morötesi olarak adlandırılmaktadır.
Görünür bölge: Elektromanyetik spektrumun 0.4 µm < λ < 0.7 µm dalga boyunda
yer almaktadır. Đnsan gözü veya uzaktan algılama sensörleri, görünen ışık bölgesindeki hedefleri tespit ederler. Çizelge 2.1’de görünür bölgedeki renkler ve bunlara ait dalga boyları belirtilmiştir.
Çizelge 2.1 Görünür bölgedeki renkler ve bunlara ait dalga boyları
Renk Dalga Boyu (λ)
Menekşe Rengi 0.4 µm < λ < 0.446 µm Mavi 0.446 µm < λ < 0.5 µm Yeşil 0.5 µm < λ < 0.578 µm Sarı 0.578 µm < λ < 0.592 µm Turuncu 0.592 µm < λ < 0.620 µm Kırmızı 0.620 µm < λ < 0.7 µm
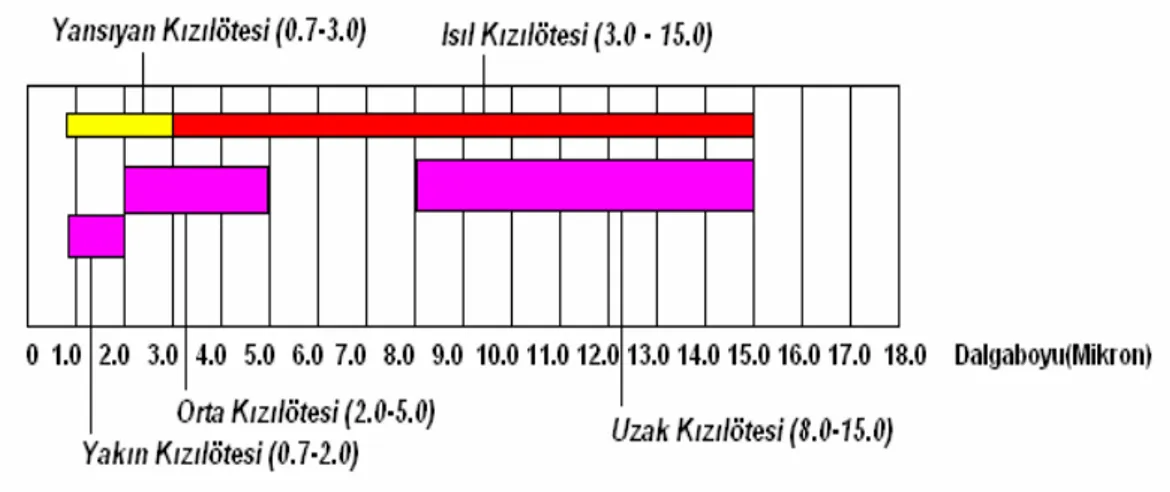
Kızılötesi (ĐR) bölgesi: Elektromanyetik spektrumun 0.7 µm < λ < 15 µm dalga
boyunda yer almaktadır. 0.7 µm < λ < 0.9 µm arası fotoğraflarla saptanabildiği için fotoğrafik kızılötesi bölgesi olarak adlandırılır.
Kızılötesi bölgesi kendi içerisinde de bölümlere ayrılır. Bu bölümler ve kızılötesi bölgesinin elektromanyetik spektrumdaki yeri Şekil 2.3’te gösterilmiştir.
Şekil 2.3 Elektromanyetik spektrumda kızılötesi enerji bölgesi
Mikrodalga bölgesi: Elektromanyetik spektrumun 1 mm < λ < 1 m dalgaboyunda
yer almaktadır. Bu bölgede aktif ve pasif algılama yapılabildiği için her türlü hava koşulunda algılama yapma imkanı vardır (URL2). Mikrodalga bölgesi algılama durumuna göre 2 bölgeye ayrılır.
Pasif mikrodalga bölgesi, elektromanyetik spektrumun 1 mm < λ < 1 m dalgaboyunda yeralır.
Aktif mikrodalga bölgesi, elektromanyetik spektrumun 1 cm < λ < 1 m dalgaboyunda yeralır. Radar olarak da adlandırılır. Kendi içerisinde iki kısma ayrılır. Bunlar:
• SHF (Süper Yüksek Frekans) : 1 cm < λ < 10 cm
• UHF (Ultra Yüksek Frekans) : 10 cm < λ < 1 m
şeklindedir.
Mikrodalga bölgesi algılama durumu dışında, dalga boylarına göre 8 tane banda ayrılmıştır. Bu bantlar şöyle tanımlanmaktadır:
• Ka-Bandı (0.75 cm - 1.1 cm), K-Bandı (1.1 cm - 1.67 cm) ve Ku-Bandı (1.67 cm - 2.4 cm) çok kısa dalgaboylarıdır. Uçaklarda kullanılan ilk radar sistemidir.
• X-Bandı (2.4 cm - 3.75 cm), askeri amaçlar ve arazi haritacılığı amaçları için uçaklarda kullanılmıştır.
• C-Bandı (3.75 cm - 7.5 cm), insansız hava araçlarında ve uzay araçlarında (ERS-1 ve RADARSAT) kullanılmaktadır.
• S-Bandı (7.5 cm - 15 cm), Rusların ALMAZ uydusunda kullanılmıştır.
• L-Bandı (15 cm – 30 cm), ABD’nin SEASAT, Japonların JERS-1 uyduları ve NASA’nın uçaklarında kullanılmaktadır.
• P-Bandı (30 cm - 100 cm), NASA’nın deneyimsel araştırma uçaklarında kullanılmaktadır.
2.2 Uzaktan Algılamayı Etkileyen Faktörler
Enerji kaynağı, hedef ve algılayıcı arasındaki atmosfer ve yeryüzündeki materyaller, uzaktan algılamayı engellemektedir. Güneşin sağladığı enerjinin tümü hiç bir zaman algılayıcılar tarafından kaydedilemez. Atmosferin ve yeryüzünün uzaktan algılamaya olan etkilerinin temel bazda bilinmesi; doğru sensörün seçilmesine ve daha iyi görüntünün elde edilmesine olanak sağlamaktadır.
2.2.1 Atmosferik etkenler
Güneş enerjisi, sensöre atmosferin içinden geçerek ulaşmaktadır. Atmosfer içindeki partiküller ve muhtelif gazlar bu enerjinin yayılmasını etkilemekte, başka bir deyişle engellemektedir. Bu etkileme, saçılma ve emme tarzında olmaktadır (Đşlem 2000).
Saçılma: Atmosferde bulunan gaz molekülleri enerji yayımını etkileyerek onun
orijinal yönünü değiştirir. Meydana gelen dağılma; yayımın dalga boyuna, partikül ve gazların çokluğuna ve ışının atmosferde kat ettiği mesafeye bağlı olarak değişmektedir. Atmosferdeki dağılma; “Rayleigh”, “Mie” ve “Serbest” olmak üzere üç şekilde olmaktadır.
Emme (Soğurma): Atmosferin içinde büyük ölçüde su buharı (H2O), oksijen (O2),
karbondioksit (CO2) ve Metan (CH4) gazları bulunur. Bu gazların tümü dönme ve
titreşimler yoluyla elektromanyetik radyasyon ile etkileşerek bazı dalga boylarındaki enerjinin soğurulmasına neden olurlar. Uzaktan algılama sistemlerinde kullanılacak olan dalgaboyları, atmosferden geçebilme özellikleri dikkate alınarak elektromanyetik spektrumda uygun gölgelerden seçilirler. Bu bölgeler, atmosferden gelen enerjilere göre geçirgen olan dalgaboylarıdır ve “atmosferik pencere” olarak adlandırılır (Shusun 1995).
2.2.2 Yeryüzünün etkileri
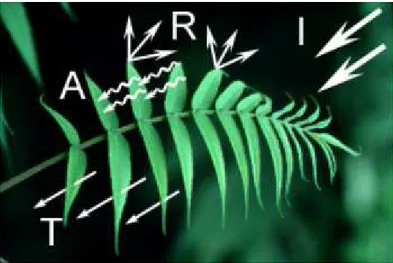
Atmosfer tarafından dağıtılmayan veya emilmeyen enerji, dünya yüzeyine ulaştığında önemli derecedeki bir engelleme ile karşılaşır. Enerji dünya yüzeyine çarptığında ve geldiğinde; emme (Absorption), geçirme (Transmission) ve yansıma (Reflection) olarak adlandırılan 3 tip etkiye maruz kalmaktadır. Gelen enerji yer yüzeyinde 3 tip etkiden biri veya daha fazlası ile karşılaşmaktadır. Bunlardan her birinin etkileme oranı; enerjinin dalga uzunluğuna, yüzeydeki materyale ve şartlara bağlı olarak değişmektedir. Yansıyan veya emilen enerji, algılayıcılar tarafından yapılan ölçümlerle ve kaydedilen sayısal numaralar vasıtasıyla direk olarak kontrol edilebilmektedir. Farklı materyaller, farklı miktarlardaki enerjiyi yansıtır, emer ve aktarır. Bu farklılıklar, görüntüdeki farklı özelliklerin belirlenmesine olanak
sağlamaktadır (Đşlem 2000). Elektromanyetik enerjinin bir bitki yüzeyinde karşılaştığı etkiler Şekil 2.4’de gösterilmiştir.
Şekil 2.4 Bir bitkide gelen ışın (I), emme (A), geçirme (T) ve yansıma (R) (Đşlem
2000)
Enerjinin korunumu kanununa göre; gelen ışının enerjisi, emilen, geçirilen ve yansıyan enerjilerin toplamlarına eşittir. Buna göre:
EI = ER + EA + ET (2.2)
olur. Burada, EI gelen ışının enerjisi, EA emilen ışının enerjisi, ET geçirilen ışının
enerjisi, ER yansıyan ışının enerjisidir.
Emme (Soğurma): Güneş ışınları hedefe çarptığında, materyalin kimyasal bileşimi
veya molekülleri kapsamındaki atomların çekimi nedeniyle emilir. Elektromanyetik spektrumun emilen bu kısmı algılayıcıya dönmez. Emilen spektrum olarak adlandırılan bu tip dalga boyları, görüntülenen alan hakkında birçok bilgiyi içermektedir.
Geçirme: Yansımayan veya emilmeyen enerji, materyalin bir uçundan girip diğer
ucuna doğru gitmektedir. Elektromanyetik spektrumun bu kısmı algılayıcıya dönmemektedir (Đşlem 2000).
Yansıma: Enerjinin tümü veya bir kısmı yüzeye çarptığında yön değiştirerek tekrar
atmosfere döner. Yansıma olarak isimlendirilen bu husus sensörler tarafından algılanarak kaydedilir. Yansıma, maddenin moleküler yapısına, yüzeyin doğasına,
yüzeye düşen enerjinin dalga boyuna ve enerjinin geliş açısına bağlıdır. Đki yansıma durumu söz konusudur: Bu durumlar:
• Ayna yüzeyi (düzgün) yansıma
• Dağınık yansıma
şeklindedir.
2.3 Uzaktan Algılamada Sensör Sistemleri
Uzaktan algılamada sensör sistemleri algılama esaslarına göre iki kısma ayrılır. Bunlar, pasif ve aktif sensörlerdir.
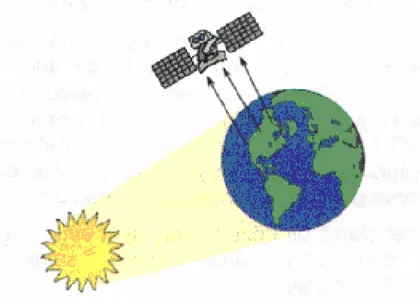
Pasif sensörler: Pasif sensörler, doğal enerjinin mevcut olduğu zamanlarda algılama
yapma kabiliyetindedirler. Bu enerji öncelikli olarak Güneşten gelip yeryüzünden yansımasından ortaya çıkar (URL10).
Pasif sensörler, kendi kaynaklarından enerji yaymazlar. Bu nedenle sadece günışığında (güneşin dünyayı aydınlattığı süre boyunca) çalışırlar. Günışığının olmadığı zamanlarda yani geceleri çalışamazlar. Pasif sensörün çalışma metodu Şekil 2.5’de gösterilmiştir.
Bu özelliklerden istifade ederek algılama yapma kabiliyetine sahip olan kameralar v.b. sensörler, pasif sensör sınıfına girerler.
Aktif sensörler: Bu tip sensörler, algılama için gerekli enerjiyi, güneşe bağlı
olmaksızın kendi kaynağından sağlamaktadır. Sensör hedefe kendi kaynağından enerji gönderir ve takiben hedeften yansıyan enerjiyi tespit eder ve kaydeder. Aktif sensörlerin en büyük avantajı, mevsimlere bağlı olmaksızın her havada ve her zaman algılama yapmasıdır. Bununla beraber hedefi aydınlatmak için büyük miktarlardaki enerji üretimine gereksinim duyulmaktadır (Đşlem 2000). Aktif sensörlerin en çok bilineni Radar (Radio Detection and Ranging) dır. Şekil 2.6’da aktif sensörlerin çalışma metodu şekil olarak gösterilmiştir.
Şekil 2.6 Aktif sensörün çalışma metodu
2.4 Uzaktan Algılama Platformları
Uzaktan algılamanın tanımında da belirtilmiş olduğu gibi Dünya’yı belirli uzaklıklardan gözlemleyebilmek için gerekli algılama aletlerini taşıyacak araçlara gereksinim vardır. Algılama aletlerini taşıyan bu araçlara platform denir.
Platformlar, atmosfer içersinde algılama yapmak için kullanılıyorsa bunlara hava platformları (airborne platform), eğer uzaydan algılama yapmak için kullanılıyorsa, bunlara da uzay platformları (spaceborn platform) adı verilir (Sesören 1999).
2.4.1 Uzay platformları
Uzay platformları, yeryüzündeki çok geniş alanların ayrıntılarıyla birlikte algılanmasına olanak tanır. Değişmeyen ve devamlı bir yörüngeye sahip olmaları, aynı noktaların tekrar tekrar algılamasını sağlar. En büyük dezavantajları, bozulduklarında ulaşılıp tamir edilmelerindeki güçlüktür (Sesören 1999). Uzay platformları; insanlı uydular, otomatik uydular ve uzay istasyonları olarak üç
şekildedir.
Otomatik uydular: Bir otomatik uydu genellikle uydu ismiyle adlandırılır. Bu
uydular yerden 250 km ve daha yüksek uzaklıklar için kullanılırlar. Birkaç aydan birkaç yıla kadar olan periyotlar için planlanırlar.
Otomatik uydular, uzaya, bir yerleştirme aracı vasıtasıyla, hesaplanan belirli bir hız, açı ve yönde gönderilirler. Bir cisim bu şekilde uzaya gönderilirse yerin çekim alanından çıkmak ister. Fakat dünyanın yerçekimi tarafından geri çekilir. Cisim üzerindeki merkezkaç ve yerçekimi kuvvetleri eşit olursa bu sefer cisim dünya etrafında dönmeye başlar.
Otomatik uydular yörüngelerine göre; alçak yörüngeli ve yüksek yörüngeli uydu sistemleri olmak üzere ikiye ayrılır.
Alçak yörüngeli uydu sistemleri, Güneşle eş zamanlı (senkronize) bir yörüngede yol alırlar. Bu uyduların yörünge yüksekliği ortalama 700 km ile 1500 km arasında değişmektedir. Dünya kendi ekseni etrafında ve yörüngesinde dönerken bu uydularda dünyanın çevresinde dönerek algılama işlemini gerçekleştirirler (URL5). Bu tür uydulara örnek olarak; LANDSAT, SPOT ve ERS serileri verilebilir. Alçak yörüngeli uydu sistemleri ekvator yörüngeli, kutup yörüngeli ve eğik yörüngeli olmak üzere üç çeşittir.
yörüngeli uydu sistemleri gösterilmiştir.
Şekil 2.7a Ekvator yörüngeli uydu sistemleri (URL 15)
2.5 Uzaktan Algılamada Görüntü Özelliklerini Etkileyen Faktörler
Uzaktan algılamada görüntüler, dalga boyu ne olursa olsun, elektromanyetik enerjinin analog olarak kaydedilmesi ve sayısal hale dönüştürülmesi sonucunda meydana gelmekte ve bilgisayar ortamında gösterilmektedir. Görüntüleri etkileyen unsurlar ;
• En küçük resim elemanı boyutları (piksel)
• Tarama genişliği
• Band
• Çözümleme olarak ele alınmaktadır.
2.5.1 Piksel
Resim elemanı olarak ifade edilen piksel, sayısal formatta sunulan ve ekrana getirilen görüntünün eşit boyut ve şekildeki en küçük kısmıdır. Görüntü, piksel gridlerinden meydana gelmektedir. Pikseller, her bir sahanın parlaklığını sayısal numara olarak belirtmektedir. Her bir piksel için sensör tarafından ölçülen bir sayısal numara değeri bulunmaktadır. Bilgisayar, farklı parlaklık seviyesindeki her bir sayısal değeri resim olarak görüntüler. Şekil 2.8’de piksellerin ekranda görüntülenmesi gösterilmiştir.
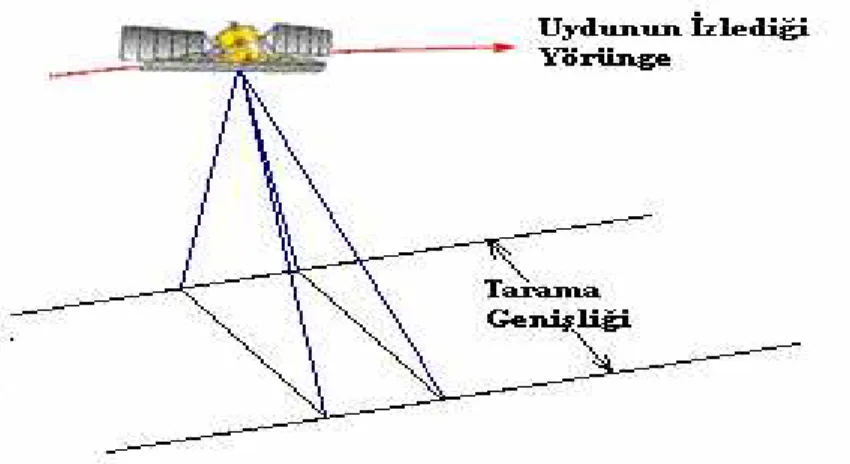
2.5.2 Tarama genişliği
Uydu sensörlerinin yeryüzeyinde gördüğü ve algıladığı sahanın tam genişliğini ifade eden bir terimdir. Örneğin Landsat uydusunun tarama sahasının genişliği 185 km iken, ERS-1 uydusununki 100 km’dir. Uyduların yörünge yükseklikleri farklı olduğu için yer yüzünde kapladığı genişlikler de farklıdır (Đşlem 2000). Şekil 2.9’da tarama genişliği gösterilmiştir.
Şekil 2.9 Tarama genişliği
2.5.3 Band
Elektromanyetik enerji yayılımında herhangi bir dalga boyu aralığını belirtmek için kullanılan bir terimdir. Uzaktan algılama cihazları görüntüleri genellikle farklı bantlarda toplarlar. Bu bantlara temsil ettikleri elektromanyetik dalga boyu aralıklarının özelliklerine göre, mavi, yeşil, kırmızı, kızılötesi, termal, mikrodalga gibi isimler verir.
Piksellerin bir araya gelmesinden bandlar, bir veya daha fazla bandın bir araya gelmesinden görüntüler oluşmaktadır. Her bir band bir ana renk tarafından temsil edilmektedir (Đşlem 2000).
2.5.4 Çözümleme
Çözümleme, bilgisayar ekranında gösterilen piksellerin miktarını veya yeryüzündeki bir alanın görüntü dosyası kapsamında temsil ettiği pikseli ifade etmektedir. Mekansal, tayfsal, radyometrik ve Zamansal çözümleme olmak üzere dört kısma ayrılır.
Mekansal çözümleme: Bir görüntü üzerinde, yeryüzü özelliklerini tanımlamayı
sağlayan en küçük obje büyüklüğü olarak ifade edilir. Düşük mekansal çözümleme değeri hassasiyetin daha iyi olduğunu belirtmektedir. Örneğin 1 metrelik mekansal çözümleme değeri, 10 metrelik mekansal çözümlemeden daha fazla detay vermektedir. Sensörler kendine özgü ve birbirinden farklı mekansal çözümleme değerine sahiptir.
Tayfsal çözümleme: Bu terim; yansıyan enerjiyi ölçen algılayıcıların dalgaboyu
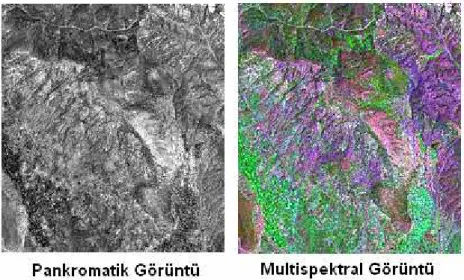
ölçme kapasitelerini tanımlamak için kullanılır. Dalgaboyları, mikrometre veya mikron ölçeğinde ifade edilirler. Şekil 2.10’da bir bölgenin tek bantla ve çok bantla algılanması sonucu ele edilen görüntüler gösterilmiştir.
Şekil 2.10 Tayfsal çözümleme
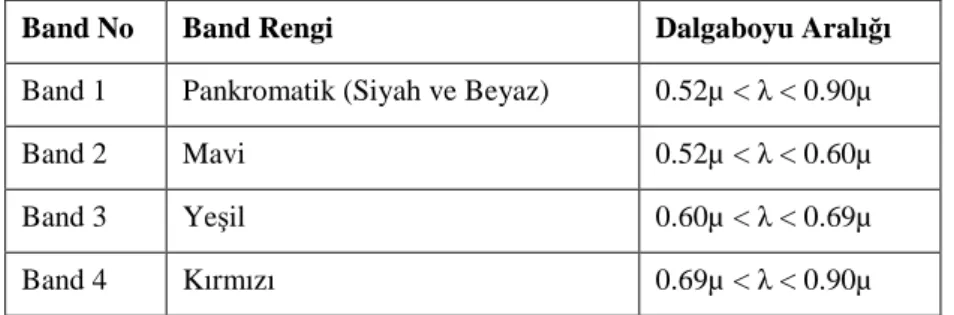
Örnek olarak Landsat 7 uydusunun algılama yaptığı bandlar ve bu bandlara ait dalga boyları Çizelge 2.2’de gösterilmiştir.
Çizelge 2.2 Landsat 7 uydusunun algılama yaptığı bantlar ve dalga boyları
Band No Band Rengi Dalgaboyu Aralığı
Band 1 Pankromatik (Siyah ve Beyaz) 0.52µ < λ < 0.90µ Band 2 Mavi 0.52µ < λ < 0.60µ Band 3 Yeşil 0.60µ < λ < 0.69µ Band 4 Kırmızı 0.69µ < λ < 0.90µ
Radyometrik çözümleme: Radyometrik çözümleme, sensörün parlaklık farklılıklarına olan hassasiyetini belirtmektedir. Görüntü sistemlerinin radyometrik çözümlemesi, enerji kapsamındaki çok ince farklılıkları ayırt etme kabiliyeti olarak da tanımlanmaktadır. Radyometrik çözümleme ile ilişkili olarak görüntü verisinin değerleri, sayısal numaralarla ifade edilmektedir. Bu numaralar ikili (binary) sayı sisteminde ve 2’nin üsleri tarzında düzenlenmiştir (Đşlem 2000). Burada 2’nin üs sayısına “bit” adı verilir.
Örneğin; 8 bit’lik bir görüntü ele alınmış olsun. Burada;
8 bit = 28 = 256
şeklinde bir sonuç elde edilir. Bu durumda, bu görüntüdeki her pikselin 0 ile 255
arası bir değerle gösterildiği anlaşılır. Bit değeri düşük olan görüntüde, radyometrik çözümleme de düşüktür.
Zamansal çözümleme: Zamansal çözümleme, özel bir sahaya yönelik olarak
sensörün algıladığı görüntünün sıklığına işaret etmektedir. Değişiklik tespitinde önemli bir faktör olarak kabul edilen bu çözümleme tipi, görüntüleme faaliyetleri arasındaki zamanı belirtmektedir. Zamansal çözümleme, uydu sensörünün kapasitesine, tarama genişliğine ve yüksekliğe bağlı olarak değişmektedir.
3. RADAR SĐSTEMLERĐ
Radarlar, cisimlere çarpıp geri gelen radyoelektrik dalgalarından yararlanarak nesnelerin konumunu ortaya çıkarabilen cihazlardır. Radar kelimesi, aygıtın çalışma prensibinin orijinal adı olan “Radio Detection And Ranging” kelimelerinin baş harflerinin bir araya gelmesiyle ortaya çıkmıştır.
Radar, Amerika Birleşik Devletleri tarafından 1920’li yıllarda, gemi ve uçakların izlenmesi amacıyla geliştirilmiştir. Ancak bu radar, yer bazlı bir radardır. Bu nedenle, 1930’larda uçağa takılan izleme radarları geliştirilmiştir. Bu tip radarların çok büyük anten boylarına ihtiyaç duyması nedeniyle, 1950’lerde Yapay Açıklıklı Radar (SAR) sistemi geliştirilmeye başlanmıştır. Bu sistemin özelliği, çok büyük anten boylarına ihtiyaç duymamasıdır.
1990’lı yıllarda SAR sistemleri, uydu platformlarına yerleştirilerek uzaya gönderilmeye başlanmıştır. Böylece, daha büyük alanların izlenmesi ve görüntülenebilmesi mümkün hale gelmiştir.
3.1 Radar Görüntüleme ve Özellikleri
Radar görüntülemenin temel prensibi, yeryüzüne aktif mikrodalga sinyallerini göndermek ve bu sinyallerin büyüklüğü ile yüzeyden geri yansıması arasındaki zaman farkını kaydetmektir. Bir radar sistemi, bir alanı mikrodalga sinyalleri ile aydınlatır ve grei dönen sinyallerin kuvveti ile yolculuk zamanını kaydeder. Bu yansıyan sinyaller, nesnelerin dizilimlerinin (ve ya mesafelerinin) tespit edilmesini sağlar (Dilia ve Domingo 1999). Mikrodalga sinyallerini hem gönderme hem de algılama da aynı radar anteni kullanılmaktadır. Bu anten 300 MHz ile 30 GHz frekanslarına karşılık gelen ve 1 cm ile 1 m arasında değişen dalgaboylarına sahip mikrodalga sinyallerini alımı yapılacak alana göndermekte ve buradan geri yansıyan sinyalleri de geri almaktadır (Curlander 1991).
• Radar görüntüleme sistemi aktif bir sistemdir. Yani görüntüleme için ihtiyaç duyduğu enerjiyi kendisi üretmektedir. Bu nedenle güneş ışığından bağımsız olarak her türlü hava şartlarında yeryüzünü görüntüleyebilmektedir.
• Yeryüzü topografyasını ve morfolojisini, deniz ve kara ortamlarındaki morfolojik değişimleri çok hassas algılayabilmektedir.
• Suyu ve bağıl nemi hassas bir şekilde algılayabilmektedir.
• Nem ve düşük yoğunluklu toprağın izin verdiği oranda yeraltı özellikleri ile ilgili bilgiler edinilebilmektedir.
Radar sistemi; yerden yansıyan radar sinyalinin gücüne bağlı olarak, piksel değeriyle sayısal olarak tanımlanan bir görüntü üretir (Akabalı 2002).
Radar sinyallerinin yansımasını etkileyen bir takım parametreler mevcuttur. Bunlar:
• Radar teknolojisinin gözlemsel parametreleri (frekans, polarizasyon ve yansıyan sinyallerin gelme açısı)
• Yeryüzünün fiziksel parametreleri (yüzey pürüzlülük oranı, geometrik şekil ve nemlilik)
şeklindedir.
3.1.1 Frekans etkisi
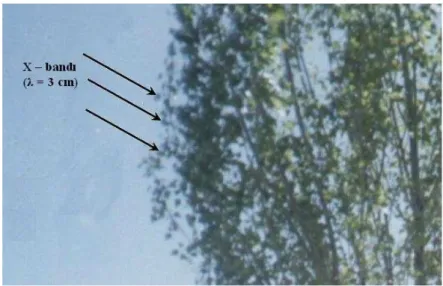
Radar mikrodalga frekansı, arazi yüzeyinin altına inilebilecek derinliğin anlaşılmasında ve yüzey pürüzlülüğünün mutlak (bağıl) olarak ölçülendirilmesinde kullanılır. Đnilebilecek derinlik dalgaboyunun artması ile doğru orantılıdır (URL7).
Ormanlık bir alanda, X – bandı (λ = 3 cm) kullanılması durumunda, sinyaller, ağaçların üst kısmındaki yapraklara etki eder. Bu durum Şekil 3.1’de gösterilmiştir. Bu şekilde ağacın üst kısmındaki yapraklar hakkında bilgi edinilmesini sağlanır. L – bandı (λ = 23 cm) kullanıldığında ise sinyaller, gövde kısmındaki yapraklara ve küçük dallara etki edecektir. Bu durumda da ağacın dalları ve yaprakları, yani ağacın gövdesi hakkında bilgi elde edilmesi sağlanır. Bu durum da Şekil 3.2’de gösterilmiştir.
mikrodalgalar su ve ıslak yüzeylerde birkaç milimetreden fazla derinliğe geçemezler (URL7).
Şekil 3.1 Ormanlık alanda X bandının kullanılması
Şekil 3.2 Ormanlık alanlarda L bandının kullanılması
3.1.2 Polarizasyon
Polarizasyon, elektromanyetik bir dalganın bir bileşke parametresi olan elektrik alanının uyumlandırılması olarak ifade edilir. Radar tekniği ile yatay ve düşey polarize olmuş sinyaller üretilir ve kaydedilir. En çok kullanılan polarizasyon
kombinasyonları HH , VV , HV ve VH’dir. Bu gösterimlerde H (horizontal = yatay), V (vertical = düşey) anlamına gelmektedir. Ayrıca gösterimlerdeki ilk harf gönderilen radyasyonun polarizasyonunu ve ikinci harf ise alınan radyasyonun polarizasyonunu belirtmektedir. Örneğin “LVH” gösterimi “L bandında düşey (V)
olarak gönderilen sinyallerin, yatay (H) olarak geri alındığını” göstermektedir.
3.1.3 Pürüzlülük etkisi ve yüzeyin geometrik yapısı
Pürüzlülük, bağıl bir kavramdır ve radar anteni ile gönderilen mikrodalga sinyallerinin yüzeyle yaptığı geliş açısı ile doğrudan ilişkilidir.Bu sinyaller yüzeyin geometrik yapısına bağlı olarak değişik yönlere yansırlar.Yansıma sonucu geri dönen sinyal sayısı, gönderilen sinyal sayısı ve kuvvetine göre çok daha azdır. Bu bakımdan yansımaların şiddeti düşük ölçülür. Buna paralel olarak da radar görüntüsü üzerindeki parlaklık ton derecesi düşer. Karasal yüzeylerdeki karakteristik şekil ve geometrik farklılıklar pürüzlülüğün oranını artırır. Geri dönen sinyallerin sayısı ve kuvveti ile birlikte parlaklık derecesi yüksek değerlerde algılanır. Deniz ve göl yüzeyleri meteorolojik etmenler (yanı, rüzgar, yağış gibi) dışında sakin ve pürüzsüz ortamlardır. Bu nedenle gönderilen sinyaller bu bölgelerde düzgün yansıma yapar ve sensöre geri yansımaz. Bu nedenle radar görüntüsünde siyah tonda ve düzgün olarak gözükürler. Rüzgarlı bir havada dalgaların yaratacağı geometri ve yüzeyin hareketliliği, geri yansımayı fazlalaştırır, parlaklık artar ve neticede radar görüntüsünde açık gri tonlar belirli dokuda yaygın olarak gözükür. Radara doğru eğik olan yüzeyler,daha fazla yansıma gösterirler ve radar görüntüsünde daha parlak görünürler. Radar tarafından aydınlatılmamış alanlar (dağın arka yamacı) gölgede kalırlar ve koyu görünürler (URL7).
3.1.4 Yansıyan sinyallerin geliş açısı
Geliş açısı, alımı yapılan yüzeyin normali ile yansıyan sinyallerin doğrultusu arasında kalan açıdır. Açının artması veya azalması, yüzeydeki cisimlerden yansıyan sinyallerin kuvvet değerlerinde de değişime sebep olur.
3.1.5 Nemlilik etkisi
Radar sinyallerinin yüzeyle etkileşimi nem ve ıslaklıkla orantılı olarak artar veya azalır. Elektromanyetik dalganın bir yüzeyin altına geçerek alt yüzeylerden yansıyabilmesi, yüzeyin ıslaklık ve nem oranı ile ters orantılı olması anlamına gelir (Shusun 1995).
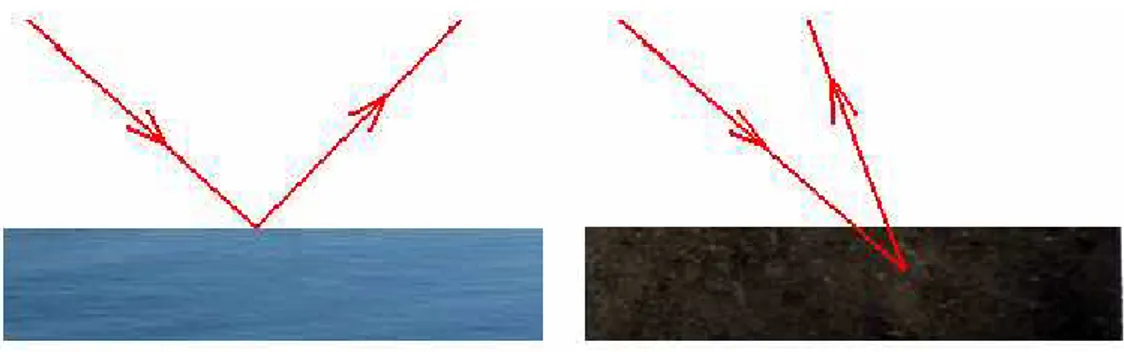
Radar görüntülerinde kuru objeler, ıslak objelerden daha parlak görünürler. Tarımsal bir alanda sulama yapılmamış saha, sulama yapılmış sahaya göre daha parlak tonda görüntülenir. Ancak deniz ve göl yüzeyleri bu durumun dışındadır. Çünkü bu bölgeler sadece sudan oluşurlar ve sinyaller bu bölgelerde düzgün yansıma yaparlar.
Şekil 3.3’de radar sinyallerin su ve toprak ortamında yansıması gösterilmiştir.
Şekil 3.3. Neme bağlı olarak radar sinyallerinin su ve toprak ortamında yansıması
3.2 Radar Görüntüleme Sistemleri
Radar sistemleri, kendi bünyelerinde ürettikleri radar sinyallerini yeryüzüne gönderme ve yeryüzünden geri yansıyan bu sinyalleri de algılama esasına göre çalışmaktadır. Yansıyan sinyaller geri alınarak, yeryüzüne ait radar görüntüleri elde edilir.
Radar görüntüleri pek çok noktanın diziliminden veya resim elemanlarından oluşur. Yeryüzündeki bir alan için radar sinyallerinin geri yansımaları, radar görüntüsünde pikseller şeklinde olmaktadır. Düşük enerjili geri yansımalar, görüntüde ‘karanlık alanlar’ olarak, yüksek enerjili geri yansımalar ‘daha açık alanlar’ olarak gösterilir.
Parlaklık, radar antenine yansıyan yüksek miktardaki enerjiyi, koyuluk ise yansıyan düşük miktardaki enerjiyi ifade etmektedir (URL7).
Günümüzde iki tip radar görüntüleme sistemi mevcuttur. Bunlar:
• Gerçek Açıklıklı Radarlar (Real Aperture Radars , RAR)
• Yapay (Sentetik) Açıklıklı Radarlar (Syntetic Aperture Radars , SAR)
şeklindedir.
3.2.1 Gerçek açıklıklı radarlar
Bu tür radarlar genellikle uçaklara takılan radarlardır. Bu nedenle genellikle “Yan Bakışlı Uçak Radarları” olarak adlandırılmaktadır. Gerçek açıklıklı radarların anten boyu ile sınırlı bir azimut çözünürlüğü vardır. Bu çözünürlük, hedef ile radar anteni arasındaki mesafe (eğik mesafe) ile orantılıdır.
Dar bir enerji ışını uçağın uçuş istikametine dik olacak şekilde gönderilir. Enerji sinyali radar anteninden gönderilir ve değişik şiddetlerdeki yansımalar, arazinin dar bir şerit halinde görüntüsünün elde edilmesinde kullanılır. Bir sonraki sinyal gönderildiğinde, radar ileriye doğru küçük bir miktar hareket etmiş ve arazinin değişik bir bölgesi şerit halinde görüntülenmiş olacaktır. Araziye ait bu sıralı parçalar, azimut istikametini oluşturmak için yan yana kaydedilir (Akabalı 2002).
Azimut çözünürlüğü: Bir radar algılayıcısının hareket yönüne paralel istikamette
bulunan birbirine yakın iki cismi ayırt edebilme yeteneğidir. Gerçek açıklıklı radar için, azimut çözünürlüğündeki iki hedef, aralarındaki mesafe radar ışını genişliğinden fazla ise ayırt edilebilirler. Bu nedenle, ışın genişliği, bu sistemler için azimut çözünürlüğü olarak kabul edilir.
Işın genişliği, mesafeye göre sabit, açısal bir değerdir. Bu değer, gönderilen sinyalin dalga boyuna (λ) ve antenin azimut yönündeki uzunluğuna (dh) bağlıdır. Buna göre
ışın genişliği;
h d
λ
şeklinde tanımlanmaktadır. Mesela; kullanılan sinyalin dalgaboyu 9 cm ve radar
anteninin azimut yönündeki uzunluğu 10 m olursa, ışın genişliği;
h d λ β= = 10 09 . 0 = 0.009 radyan
olarak bulunur.Gerçek açıklıklı azimut çözünürlüğü ise;
raz = R*β (3.2)
olarak bulunur. Burada ;raz azimut çözünürlüğü, R anten ile yeryüzü noktası
arasındaki eğik uzunluk ve β ışın genişliği olarak tanımlanmaktadır. Örneğin 15 miliradyan (0.015 radyan) ışın genişliği, 1000 m eğik mesafesi olan gerçek açıklıklı bir radarın, azimut çözünürlüğü ise;
raz = 1000*0.015 = 15 m
şeklinde olmaktadır. Işın genişliği ve azimut çözünürlüğü kavramları Şekil 3.4’te
gösterilmiştir.
Şekil 3.4 Işın genişliği (β) ve azimut çözünürlüğü (raz)
Gerçek açıklıklı radarlar için, azimut çözünürlüğü sadece anten boyunu uzatarak veya dalga boyunu kısaltarak arttırılabilir. Kısa dalga boylarının kullanılması bulut ve atmosferik koşullardan etkilenmesini arttıracağından radar görüntüleme sisteminin her atmosferik koşulda görüntüleme yapabilme kabiliyetini azaltır (Akabalı 2002).
Bu nedenle, gerçek açıklıklı radarların bu tür sınırlamalarının üstesinden gelebilmek için yapay açıklıklı radar görüntüleme sistemleri geliştirilmiştir.
3.2.2 Yapay açıklıklı radarlar
Yapay açıklıklı radarlar (Syntetic Aperture Radar), gerçek açıklıklı radarların sınırlamalarını ortadan kaldırmak için geliştirilmiş sistemlerdir. Bu radarlar ile, kısa anten boyları ve uzun dalgaboyları kullanarak iyi azimut çözünürlüğüne ulaşılabilmektedir. Ayrıca bu sistemlerde azimut çözünürlüğü, eğik mesafeden bağımsızdır. SAR görüntüleri, herhangi bir bölgedeki değişiklikleri araştırmak için oldukça uygun bir kullanım olanağına sahiptir (Akabalı 2002).
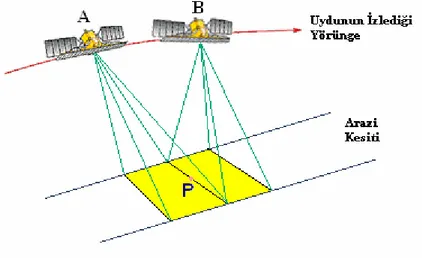
Yapay açıklık radarlarında açıklık, radarın hareket etmesi yardımıyla sağlanmaktadır. Radar hareket halinde iken, bir yeryüzü noktası birçok farklı konumdan algılanır. Algılanan bu sinyaller dijital ortamda değerlendirilerek yapay bir açıklık sağlanmış olur. Aynı zamanda bu durum SAR teknolojisinin temelini oluşturmaktadır.
Şekil 3.5’deki bir P arazi noktası, radarın A noktası konumundan başlayarak B
noktası konumuna kadar görüntülenmektedir. Bu sayede, radarın A noktasından B noktasına hareketi süresince, P arazi noktası birçok farklı konumdan algılanmış olur.
Şekil 3.5 Arazi noktasının görüntülenmesi
ile algılar ve radar anteni ile cisim arasındaki eğik düzlem üzerine doğrusal bir geometri ile görüntüler (Schreier 1993). Radar verisinin iki farklı gösterimi söz konusudur:
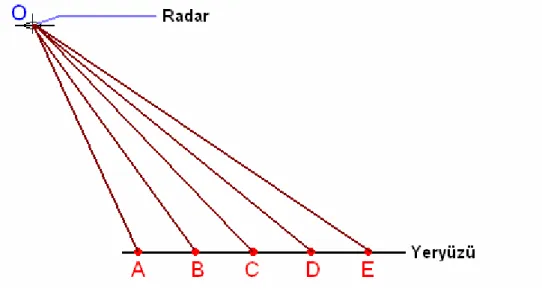
Eğik mesafe radar görüntüsü, radar anteni ile yeryüzü hedef noktası arasındaki eğik mesafelerin ölçüldüğü görüntüdür. Şekil 3.6’da SAR sensörü tarafından ölçülen eğik mesafeler şekilsel olarak gösterilmiştir.
Yer mesafesi radar görüntüsü ise, radar sensörünü taşıyan platformun yer izi ile hedef noktaları arasındaki mesafelerin ölçüldüğü ve seçilen bir referans düzlemine uygun pozisyonda yerleştirildiği görüntüdür.
Şekil 3.6 Eğik mesafeler
Şekil 3.6’da O noktası radar sensörü ve A, B, C, D, E noktaları yeryüzü noktalarıdır.
Ayrıca AB , BC, CD, DE mesafeleri eşittir. Ancak radar anteni ile noktalar arasındaki mesafeler, OA<OB<OC<OD<OE şeklinde olmaktadır. Eğik mesafe radar görüntüsünde, ise yeryüzündeki bu noktalar arasındaki mesafeler:
AB =OB-OA (3.3)
BC=OC-OB (3.4)
CD=OD-OC (3.5)
şeklinde elde edilmekte ve görüntülenmektedir. Bu nedenle radar görüntüsü üzerinde
bu mesafeler, AB <BC<CD< DE şeklinde olmaktadır.
Radar ölçümlerinin sonucu olarak eğik mesafe radar verileri elde edilir. Bu verilerin yer mesafesine dönüştürülmesi gerekmektedir. Radar sensörünün yeryüzünü görüntülemesi Şekil 3.7’de ve eğik mesafe ile yer mesafesinin gösterimi Şekil 3.8’de gösterilmiştir.
Şekil 3.7 Radarın yeryüzünü görüntülemesi (Akabalı 2002)
Eğik mesafe ile yer mesafesi arasındaki matematiksel ilişki Şekil 3.9 yardımıyla şu
şekilde elde edilmektedir:
Şekil 3.9 Eğik mesafe ve yer mesafesi arasındaki ilişki
Şekil 3.8’ e göre; H radar antenin yüksekliği (nadir noktası ile arasındaki düşey
mesafe), s eğik mesafe, y yer (arazi) mesafesi, γ bakış açısı olmaktadır. Şekil 3.8, matematik ve geometriden yararlanarak:
s2 = H2 + y2 (3.3)
sinγ = s y
(3.4)
bağıntıları elde edilir. Bu bağıntılardan faydalanılarak eğik mesafe verileri yer (arazi) mesafesi verisi şekline dönüştürülebilir.
3.3 SAR Görüntülerinden Sayısal Yükseklik Modeli (SYM) Oluşturulmasında Kullanılan Yöntemler
Sayısal arazi modeli (SAM), bilgisayarla yapılacak işlemlere esas olmak üzere yeryüzünün sayısal olarak temsil edilmesi şeklinde tanımlanmaktadır. Sayısal yükseklik modeli (SYM) alana ait yükseklik bilgilerini içeren ve bunları lekesel
olarak ifade eden bir görüntüdür. Üretilen SYM’ de beyaz renkli alanlar yüksekliğin fazla olduğu alanları, siyah renkli alanlar ise yüksekliğin az olduğu alanları göstermektedir (URL3).
SYM, stereo olarak çekilen uydu ve radar görüntülerinden elde edilmektedir. Görüntü formatındadır. SAM, arazide ölçülmüş nokta koordinatları (x, y, z) kullanılarak elde edilir ve vektörel formattadır. Đşte bu hususlar, SYM ve SAM arasındaki en önemli farklardır. Ayrıca, mühendislik uygulamalarında SYM değil SAM kullanılmaktadır.
Günümüzde SAM üretiminde, SAR görüntüleri de kullanılmaktadır. Ancak radar görüntülerinden doğrudan SAM üretimi mümkün olmamaktadır. Bu nedenle öncelikli olarak Sayısal Yükseklik Modeli (SYM)’nin üretilmesi gerekmektedir.
Yapay Açıklıklı Radar (SAR) görüntülerinden, Sayısal Yükseklik Modeli (SYM) oluşturmada iki yöntem kullanılmaktadır. Bunlar stereoskopi ve radar interferometrisi yöntemleridir. Bunlardan stereoskopi yöntemi, klasik bir yöntem olup hassasiyeti düşüktür. Radar Đnterferometri yöntemi ise, radar görüntülerine özgü bir yöntem olup, yüksek hassasiyete sahiptir.
3.3.1 Stereoskopi yöntemi
Stereoskopi, Fotogrametri biliminde çift gözle görme işlemi olarak adlandırılır. Çift gözle görüşe ise stereoskopik görüş adı verilir. Çift gözle bakıldığında cisimler üç boyutlu olarak görülür. Đki gözle bir cisme bakıldığında, her göz bu cismi değişik açı ve doğrultulardan görür. Bu iki farklı görüntü, zihinde birleştirilerek üç boyutlu görme olayı meydana gelir (Gürbüz 1981). Bu nedenle, Fotogrametri’de hava fotoğrafları belli oranlarda birbirleriyle örtüşmeli olarak çekilirler. Bu yöntemin SAR teknolojisine uygulanmasında, uçakların yerini radar uyduları ve hava fotoğraflarının yerini SAR görüntüleri almıştır. SAR tekniğinde , stereo olan iki görüntü arasında ölçülen paralakstan yararlanılarak arazi yüksekliği hesaplanmaktadır. Şekil 3.10’ da
Şekil 3.10 Stereoskopi yönteminin SAR tekniğindeki uygulaması
Stereoskopik yöntem, düşük rölyefli arazilerde beklenen teorik doğruluklara yaklaşmaktadır. Fakat yüksek rölyefli arazilerde doğruluk düşmekte ve istenilen teorik doğruluğa yaklaşılamamaktadır. Bunun temel nedeni şudur: Hata modellemesi sadece SAR’ın geometrik beklentilerine açıklama olmakta (bakış ve kesişme açıları, mesafe hatası) ve stereo çiftin ve arazinin radyometrik beklentilerini karşılamamaktadır (Akabalı 2002).
Yapılan araştırmalar, SYM doğruluğunda en önemli payın rölyef çeşidi ve eğime ait olduğunu göstermiştir. Kesişme açısının büyüklüğü, stereoskopik birleşmenin kalitesi düşürmektedir. Bu da yüksek arazi rölyefine sahip bölgelerde SYM doğruluğunu düşürür. Diğer yandan, yüksek bir çözünürlük iyi kalitede bir görüntü üretmesine rağmen, bu verilen bir konfigürasyondaki stereo oluşumu değiştirmez ve SYM doğruluğunu geliştirmez (Akabalı 2002).
SAR görüntüleri, ham veri sinyalinin işlenmesi sonucu elde edilirler. Bu görüntüler eğik mesafe veya yer mesafesi biçiminde olmaktadır. Ancak stereo görüş ve değerlendirme için, yer mesafe biçimindeki görüntüler tercih edilmektedir. Çünkü bu görüntü biçiminde mesafe verileri yer mesafesi şeklindedir. Yani görüntü üzerindeki mesafe, arazideki ile aynı olmaktadır. Bu durum sonuçların daha gerçekçi olmasını sağlamaktadır.
kuvvetlendirmek için ilave edilir. Stereo geometrinin sonuç doğruluğu; temel olarak, yer kontrol noktalarının yer ve görüntü koordinatlarına bağlıdır. Görüntü koordinatları kıymetlendirme aletinde veya bilgisayar monitöründe interaktif olarak ölçülürler (Akabalı 2002). Yer kontrol noktaları; GPS ile, topografik haritalardan, klasik haritacılık yöntemleriyle ve fotogrametrik yöntemlerle de elde edilmektedir.
3.3.2 Radar Đnterferometri yöntemi
Radar interferometri, aynı bölgenin birbirinden çok az kayık iki yörüngeden görüntüsünün alımı esasına dayanmaktadır (Akabalı 2002). Đnterferometrik SAR teknolojisi ile küçük bir anten ile yapay açıklık oluşturularak yüksek çözünürlük elde edilebilir (Uslu 2002).
Đnterferometrik SAR (InSAR) işlemi; radar sistemi ile, dünya yüzeyinde bulunan ve
radarın hareket yönüne belli bir açı yaparak giden sinyalin geri yansıdığı nokta arasındaki mesafelerin ölçülmesine denir. Ölçülen bu mesafeye eğimli (slant) menzil, yere olan izdüşümüne de yer (ground) menzili adı verilmektedir. Şekil 3.11’de eğimli menzil ve yer menzili gösterilmiştir.
Şekil 3.11 Eğik menzil ve yer menzilinin gösterimi
Şekil 3.11’e göre ;
Ψ = 90 – γ (3.5) G = Scos (90 – Ψ) = Ssinγ (3.6)
şeklinde olmaktadır.
Diğer yandan uçuş yönüne yol boyu (along-track) yada azimut yönü denilirken, uçuş yoluna dik yöne ise yol çaprazı (across-track) yada menzil (range) yönü denilir. Antenin gösterdiği doğultu ile nadir denilen dünyanın merkezine doğru olan doğrultu arasında kalan açıya ise bakış açısı (γ) denilmektedir.
SAR sensörü işlenmemiş veri sağlar. Bu verilerle elde edilen birden fazla görüntünün ortak kaydı yapılır. Ortak kayıt, aynı bölgeye ait iki görüntüden birinin asıl (master), diğerinin yedek (slave) kabul edilerek ilgili bölgeyi tam olarak kaplayacak şekilde birbirleri üzerine konulması işlemine denir. Böylece iki görüntü arasındaki değişimler tespit edilebilir (Uslu 2002).
Ortak kaydı yapılan iki görüntünden interferogram ve faz görüntüsü elde edilir. Bu sayede iki görüntünün pikselleri arasındaki faz farkları elde edilmiş olur.
Đnterferometrik SAR işleminde daha sonra faz açılımı aşamasına geçilir. Bu aşama,
görüntüdeki her bir piksele ait yükselmeyi veya alçalmayı hesaplamaya yaramaktadır.
ĐnSAR işleminde en son aşama, sayısal yükseklik modelinin oluşturulmasıdır. Bu
aşamada açılmış faz görüntüsü düşey yükselti görüntüsüne dönüştürülür.
ĐnSAR verisi elde etmek için dört yöntem kullanılmaktadır. Bu yöntemler; yol
çaprazı yöntemi, yol boyu yöntemi, tekrarlı geçiş yöntemi, diferansiyel interferometri yöntemi olarak isimlendirilmektedir. Diferansiyel interferometri yöntemi ile cm hassasiyetinde yükseklik verisi ve dolayısı ile SYM üretilebilmektedir.
3.4 Radar Görüntülemede Karşılaşılan Etkiler
Radar görüntülemede; gerek görüntülenen arazinin topografyası, gerekse radar parametreleri sebebiyle bazı etkilerle karşılaşılmaktadır. Bu etkiler, uzunluk kısalması, yerdeğiştirme, gölgeleme ve benek olarak adlandırılmaktadır.
Uzunluk kısalması, dağlık bölgelerde SAR görüntülerindeki baskın olan etkidir (Akabalı 2002). Dağların yamaç kısımlarındaki iki nokta arasındaki mesafe,
olduğundan daha yakın olarak gözükür. Bu etki, eğimin gelen radar ışınına dik olduğu yerde en büyük miktarına ulaşır.
Şekil 3.12’de uçağa takılı radar için uzunluk kısalması etkisi gösterilmiştir. Bu etki,
uydulara takılı radarlar için de benzer şekildedir.
Şekil 3.12 Uzunluk kısalması etkisi
Çok dik eğimli bir dağ yüzeyinde, dağların etek noktaları ile radar anteni arasındaki mesafe, zirve noktaları ile radar anteni arasındaki mesafeden daha büyük olacaktır. Bu durumda gerçek durumdan farklı olarak görüntü üzerinde zirve noktası önce, etek noktası ise sonra görüntülenir. Bu etki yerdeğiştirme olarak adlandırılır (Akabalı 2002). Şekil 3.13’de uçağa takılı radar için layover etkisi gösterilmiştir. Bu etki, uydulara takılı radarlar için de benzer şekildedir.
Radar antenin alım açısının, arazi eğiminden küçük olması durumunda gölgeleme etkisi meydana gelir. Gölgeli bölgeler, radar görüntüsünde siyah renkte gözükürler. Bu nedenle gölgenin ardında kalan detaylar radar görüntüsünde gözükmez. Şekil 3.14’te gölgeleme etkisi ve bu etkiye verilen bir arazi görüntüsü gösterilmiştir.
Şekil 3.14 Gölgeleme etkisi ve bu etki ile ilgili bir görüntü örneği
Radar dalga boyuna göre daha geniş özdeş bir yüzeyden geri yansıyan sinyallerin kuvvetinde oluşabilen farklar nedeniyle, görüntüde çok parlak veya çok koyu piksel değerleri oluşmaktadır. Bu etkiye “benek” adı verilmektedir. Benek etkisi radar sisteminden kaynaklanan bir etkidir. Benekler radar görüntülerinin analizi veya sınıflandırma uygulamalarında kullanımlarını zorlaştırmaktadır (Demirel 2002).
Radar görüntülerinde benek etkisini en aza indirmek veya tamamen yok etmek için çok bakışlı görüntü işleme yöntemi kullanılır. Bu yöntemde, her bir piksel için, bakış sayısı kadar elde edilen gri değerlerin ortalamaları alınır ve elde edilen yeni değer kullanılmak suretiyle görüntü elde edilir.
3.5 Günümüzde Kullanılan Bazı Radar Uyduları Ve Özellikleri
Radar görüntüleri son zamanlarda bilimsel araştırmalarda ve çalışmalarda yaygın olarak kullanılmaya başlanmıştır. Örneğin; haritacılıkta sayısal yükseklik modeli elde edilmesinde, ormancılıkta bitkiler hakkında bilgi elde edilmesinde, jeolojide petrol ve maden aramalarında ve çevre biliminde petrol kirliliğinin tespit edilmesinde radar
görüntüleri kullanılmaktadır.
Radar görüntüleri, uçaklara veya uydulara yerleştirilen radar sensörleriyle elde edilmektedir. Ancak günümüzde, uydulara yerleştirilen radarlardan elde edilen görüntüler yaygın bir şekilde kullanılmaktadır. Günümüzde hizmet veren bazı radar uyduları ve bunların özellikleri aşağıda açıklanmıştır.
3.5.1 Radarsat
Radarsat, Kanada tarafından geliştirilen bir gözlem uydusudur. Bu uydulardan birincisi olan Radarsat-1, 1995 yılında, Kanada Uzay Ajansı (CSA) tarafından yörüngeye fırlatılmıştır. Bu uyduyla ilgili bazı özellikler şöyledir:
Teknik Özellikler :
• C Bandı dalgaboyunda (λ = 5.6 cm) sinyaller gönderimi
• HH Polarizasyon (Işının yatay olarak gönderilmesi ve yatay olarak geri algılanması)
• 50-500 km arası tarama genişliği
• 10-59 derece arası bakış açısı
• Geniş alanların kapsamı için ScanSAR modu Yörünge Özellikleri:
• Dairesel ve Güneş ile eşzamanlı yörüngeye sahip olması
• Yeryüzünden 798 km yükseklikteki bir yörüngeye oturtulması
• Yörünge eğimi 98.6o
• Tekrar süresi 24 gün
şeklindedir.
Radarsat uydularının ikincisi olan Radarsat-2 uydusu, 2003 yılında Kanada Uzay Ajansı (CSA) ve MacDonald Dettwiler Ajansı (MDA) tarafından uzaya fırlatılmıştır. Radarsat-2’nin uzaya gönderilmesiyle, Radarsat-1 uydusu ile veri devamlılığı sağlanması amaçlanmıştır. Uydu, Radarsat-1 uydusu ile aynı yörüngeye oturtulmasının yanı sıra Radarsat-1’in görüntüleme modlarının tümünü de
desteklemektedir. Bu uyduyla ilgili teknik özellikler:
• C Bandı dalgaboyunda (λ = 5.6 cm) sinyal gönderimi
• HH (Yatay – Yatay), HV (Yatay – Düşey), VH (Düşey – Yatay), VV (Düşey – Düşey) olmak üzere dört farklı polarizasyon
• 20-500 km arası tarama genişliği
• 10-59 derece arası görüntüleme açısı
• Geniş alanların kapsamı için ScanSAR modu
şeklindedir. Radarsat-2, Radarsat-1 ile aynı yörüngeye oturtulduğu için yörünge
özellikleri bu uydu ile aynıdır.
RADARSAT SAR cihazı radar göndericisi (radar transmitter), bir radar algılayıcısı (radar receiver) ve bir veri göndericisi (data downlink transmitter) bölümlerinden oluşmuştur. Radar göndericisi ve algılayıcısı bir elektrikli anten yardımıyla çalışmaktadır. Bu anten gönderilen enerjiyi uydu yörüngesine dik olarak bir dar ışın olarak yönlendirir. Işının yükseklik açısı ve yükseklik profili (ışın pozisyonu) ayarlanabilir, böylece ışın dünya yüzeyini istenen bakış (incidence) açısına göre kesecektir. Işın tipini ve pozisyonunu seçebilme yeteneği önemlidir, çünkü görüntü karakteristiği her ışının bakış (incidence) açısı ile birlikte değişmektedir (URL8). Radarsat-1, Radarsat-2 ve ERS uydularının kullandığı polarizasyonlar Şekil 3.15’te ve Radarsat uydusunun görüntüsü Şekil 3.16’da gösterilmiştir.
Şekil 3.16 Radarsat (URL 17)
RADARSAT ışın tipinde değişik geliş açısı ve pozisyonları elde etmek mümkündür. Bunlar ışın pozisyonları olarak adlandırılırlar. Belirtilen herhangi bir ışın tipinde, aynı ışın açısı ve profili hem ışın gönderilirken hemde alınırken kullanılır. Alıcı, gönderilen ışının yeryüzünden geri saçılması sonucu oluşan ekoyu tespit eder. Tespit edilen sinyal sayısallaştırılarak ve kodlanarak yer veri kabul istasyonuna gönderilir (URL9). Radarsat ışın tipleri 7’ye ayrılır. Bunlar:
• Hassas ışın (Fine Beam)
• Standart ışın (Standart Beam)
• Genişletilmiş yüksek ışın (Extended High Beam)
• Geniş ışın (Wide Beam)
• Genişletilmiş alçak ışın (Extended Low Beam)
• Tarama ScanSAR ışını
şeklindedir.
Radarsat ışın tiplerinin şekilsel olarak gösterimi Şekil 3.17’de, bu ışın tiplerinin şerit genişlikleri, azimut ve yersel çözünürlükleri ise Çizelge 3.1’de verilmiştir.