ii T.C.
SELÇUK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
DĠKĠġ MAKĠNALARINDE YENĠ BĠR ĠPLĠK VERĠCĠ (HOROZ) MEKANĠZMASI TASARIMI
ġerife ġAFAK YÜKSEK LĠSANS TEZĠ MAKĠNA ANABĠLĠM DALI
iii T.C
SELÇUK ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ
DĠKĠġ MAKĠNELERĠNDE YENĠ BĠR ĠPLĠK VERĠCĠ (HOROZ) MEKANĠZMASI TASARIMI
ŞERİFE ŞAFAK
YÜKSEK LİSANS TEZİ MAKİNA ANABİLİM DALI
Bu tez 07.08.2009 tarihinde aşağıdaki jüri tarafından oybirliği / oyçokluğu ile kabul edilmiştir
Prof.Dr.Ziya ŞAKA Yrd.Doç. Dr. Arif ANKARALI Yrd.Doç. Dr. Koray KAVLAK (Danışman) (Üye) (Üye)
ii ÖZET Yüksek Lisans Tezi
DĠKĠġ MAKĠNELERĠNDE YENĠ BĠR ĠPLĠK VERĠCĠ (HOROZ) MEKANĠZMASI TASARIMI
ġerife ġAFAK
Selçuk Üniversitesi Fen Bilimleri Enstitüsü Makina Anabilim Dalı
DanıĢman : Prof.Dr.Ziya ġaka 2009, 88 Sayfa
Jüri : Prof.Dr. Ziya ġAKA
Yrd.Doç. Dr. Arif ANKARALI Yrd.Doç. Dr. Koray KAVLAK
Bu çalışmada dikiş makinaları için yeni bir iplik verici mekanizma tasarımı üzerinde durulmuştur. Günümüzde kullanılan dikiş makinalarında iğne hareket mekanizması bir krank biyel ve iplik verici mekanizma bir dört çubuk mekanizmasıdır. Aynı kranktan hareket alan bu iki mekanizma senkronize bir şekilde çalışarak dikiş işlemini gerçekleştirir. Bu mekanizmadaki bazı mahzurları nispeten de olsa gidermek ve mekanizmayı sadeleştirmek amacıyla iplik verici mekanizmaya biyel kolu vasıtasıyla hareket verecek yeni bir mekanizma tasarımı amaçlanmıştır.
Burada öncelikle kullanımdaki iğne ve iplik verici mekanizmanın kinematik analizi yapılarak tasarım için gerekli veriler ve kritik konumlar tespit edilmiştir. İplik verici yeni mekanizmada bu veriler ve kritik konumlar göz önünde bulundurulmuştur. Hazır geometri paket programı ile yaklaşık bir ön tasarım yapılmış, daha sonra mekanizmanın boyutsal ve kinematik özellikleri ile ilgili denklemler yardımıyla sözkonusu konumlarda gerekli tasarım denklemleri yazılmıştır. Bu denklemler matematik paket programında çözülerek boyutlar elde edilmiştir. Elde edilen sonuçların bilgisayar simülasyonu yapılmış dikiş mekaniğine uygun olduğu görülmüştür.
Anahtar Kelimeler: Dikiş Makinesi, İplik Verici Mekanizma, Dikiş Mekaniği, Kinematik Analiz, Mekanizma Tasarımı
iii
ABSTRACT Master Thesis
A NEW THREAD TAKE-UP MECHANISM DESIGN IN SEWING MACHINES
ġerife ġAFAK Selçuk University
Institute of the Natural and Applied Sciences Department of Mechanical Engineering
Supervisor: Prof.Dr. Ziya ġaka 2009, 88 Page
Jury: Prof.Dr. Ziya ġaka
Assoc. Prof. Dr. Arif ANKARALI Assoc. Prof. Dr. Koray KAVLAK
In this study, a new thread take up lever mechanism is designed for sewing machines. Current sewing machines use a slider crank mechanism for needle motion and use a four bar linkage for thread take up lever’s motion. Both mechanism are driven from the same crank and operate in synchronization. But there are some problems with this mechanisms structure, so to remove this problems a new take up lever mechanism which take motion from connecting rod has designed.
Primarily current needle motion and thread take up lever mechanism’s kinematic analysis has done and important data and critical positions has determined. In new thread take up lever design, these data and critical positions taken into consideration. A draft design for dimensions is made with a geometry software and then design equations which related to mechanism’s dimensions and kinematic specifications has written in determined positions. These equations are solved with a mathematical software and dimensions are found. New mechanism’s computer simulation is done and results are evaluated. In result, the new thread take up lever mechanism is appropriate for sewing mechanics.
Key Words: Sewing Machine, Thread Take Up Lever, Sewing Mechanics, Kinematic Analysis, Mechanism Design
iv
ÖNSÖZ
Bu konuda çalışmamı öneren ve çalışma sürecim boyunca değerli yardım ve katkılarıyla beni yönlendiren danışmanım Prof. Dr. Ziya Şaka’ya teşekkürlerimi sunarım.
v ĠÇĠNDEKĠLER ÖZET ... ii ABSTRACT ... iii ÖNSÖZ ... iv ĠÇĠNDEKĠLER ... v
SĠMGELER LĠSTESĠ ... vii
ġEKĠLLER LĠSTESĠ ... viii
1. GĠRĠġ ... 1
2. KAYNAK ARAġTIRMASI... 3
3. DĠKĠġ MAKĠNALARI VE DĠKĠġ MEKANĠĞĠ ... 5
3.1. Dikiş Makinası ... 6
3.1.1 Dikiş makinası üst kısım elemanları ve görevleri ... 7
3.1.1.1 Makina başı ... 7
3.1.1.2. İplik verici (horoz) ve görevi ... 8
3.1.1.3. Baskı ayağı mekanizması ve görevi ... 10
3.1.1.4. İğne mili-iğne ve görevi ... 11
3.1.1.5. İplik gerdirici (tansiyon) ve görevi... 12
3.1.2. Makina kolu ... 13
3.1.3 Makina boynu ... 14
3.2. Dikiş Makinası Ana Plaka Elemanları Ve Görevleri ... 15
3.2.1. Kumaş ilerletme ( besleme) mekanizması ... 15
3.2.2. Çağanoz, mekik, masura, lüper ... 16
3.3 Dikiş Makinası Alt Kısım Elemanları Ve Görevleri ... 18
3. 4. Dikiş Makinası Çalışma Prensibi Ve Mekanizması ... 19
3.5 Dikiş Tipleri Ve Oluşumu ... 21
3.5.1 Kilit dikiş ... 22
3.5.2.1. Tam dönen kavrayıcı ile kilit dikiş oluşumu ... 22
3.5.2.2.Yarım dönen çağanoz (kavrayıcı ) ile kilit dikiş oluşumu ... 24
3.5.3. Zincir dikiş ... 26
vi
4. DĠKĠġ MAKĠNASINDA ĠĞNE HAREKET MEKANĠZMASI VE ĠPLĠK
VERĠCĠ MEKANĠZMA ... 28
4.1. Krank-biyel mekanizması (İğne hareket mekanizması) ... 31
4.1.1. Konum Analizi ... 31
4.1.2. Hız Analizi ... 33
4.1.3. İvme Analizi... 35
4.2. İplik verici mekanizma (Dört çubuk mekanizması) ... 36
4.2.1. Konum analizi ... 37
4.2.2. İplik verici uç E noktasının konum analizi ... 40
4.2.3.Hız analizi ... 42
4.2.4. İplik verici uç E noktasının hızı ... 43
4.2.5. İvme analizi ... 44
4.2.6. E noktasının ivmesi... 45
4.3. Dikiş Mekaniği Ve Senkronizasyon ... 46
5. YENĠ ĠPLĠK VERĠCĠ MEKANĠZMA TASARIMI ... 50
5.1. Yeni İplik Verici Mekanizmanın Konum Analizi ... 53
5.1.2. İplik verici uç E noktasının konumu ... 56
5.2. Yeni İplik Verici Mekanizmada Hız Analizi ... 57
5.2.1. İplik verici uç E noktasının hızı ... 59
5.3. Yeni İplik Verici Mekanizmanın İvme Analizi ... 60
5.3.1. E noktasının ivmesi... 60
5.4. Mekanizmanın Boyutsal Tasarımı ... 61
5.5. Yeni MekanizmanınDikiş Mekaniği Açısından Değerlendirilmesi Ve Uygunluğu ... 69
6. SONUÇ VE TARTIġMA ... 73
7. KAYNAKLAR ... 74
EK–1 ... 76
vii SĠMGELER LĠSTESĠ
A ;İvme [mm/s2]
α ;Açısal ivme [ rad/s2]
γ ;Açı [rad, derece]
i ;Birim vektör j ;Birim vektör
µ(θ) ;Doğrultu birim vektörü σ(θ) ;Doğrultu birim vektörü ki ;Katsayı
ri ;Uzunluk [mm]
t ;Zaman [s]
θi ;Açı [rad, derece]
V ;Hız [mm/s]
viii ġEKĠLLER LĠSTESĠ
Şekil 3.1. Dikiş Makinası Bölümleri ... 6
Şekil 3. 2 Dikiş Makinası Üst Kısım Bölümler ... 7
Şekil 3. 3 Makine Başı ... 8
Şekil 3. 4 Makina Başında Bulunan Elemanlar ... 9
Şekil 3. 5 Mafsallı İplik Verici ve Gözün Çizdiği Yörünge ... 10
Şekil 3. 6 Baskı Ayağı Mekanizması ve İğne Mili ... 11
Şekil 3. 7 Dikiş Makinesi İğnesinin Yapısı ... 12
Şekil 3. 8 İplik Gerdirici (Tansiyon) ... 13
Şekil 3. 9 Makine Kolu ve Makine Boynunda Bulunan Elemanlar ... 14
Şekil 3.10 Kumaş İlerletme Mekanizması ... 15
Şekil 3.11 Masura ... 16
Şekil 3.12 Çağanoz (Kavrayıcı) Tipleri ... 17
Şekil 3. 13 Lüper ... 17
Şekil 3. 14 Mekik ... 18
Şekil 3. 15 Kumaş Besleme ... 19
Şekil 3. 16 Baskı Ayağı ve Kumaş Besleme Mekanizmasıyla Kumaş Kontrolü ... 20
Şekil 3. 17. Tam Dönen Çağanoz (Kavrayıcı) ile Kilit Dikiş Oluşumu ... 23
Şekil 3.18. Yarı Dönen Çağanoz (Kavrayıcı) ile Kilit Dikiş Oluşumu ... 25
Şekil 3. 19 Tek İplikli Zincir Dikiş ... 27
Şekil 4.1 İğne Mili-İğne ve İplik Verici Tahrik Mekanizması ... 28
Şekil 4.2 İğne Mili-İğne ve İplik Verici Mekanizmanın Şematik Gösterimi ... 30
Şekil 4.3 Krank Biyel Mekanizması ... 31
Şekil 4.4 İğnenin Konum Grafiği ... 32
Şekil 4.5 İğnenin Hız Grafiği ... 34
Şekil 4.6 İğnenin İvme Grafiği ... 36
Şekil 4.7 Dört Çubuk Mekanizması ve Parametreleri ... 37
Şekil 4.8 E Noktasının Çizdiği Yörünge ... 41
ix
Şekil 4.10 Dört Çubuk Mekanizmasının Vektörel Gösterimi ... 42
Şekil 4.11 E Noktasının Düşey Hız Bileşeninin Hız Grafiği ... 44
Şekil 4.12 E noktasının Düşey İvme Bileşeni ... 46
Şekil 4.13 İğne Konumu ve İplik Verici Göz E Noktasının Konum ve Hız Grafiği ... 46
Şekil 4.14. Dikiş Oluşum Basamakları ... 48
Şekil 5.1 İplik Verici Mekanizma ... 50
Şekil 5.2. Tasarlanan Yeni İplik Verici Mekanizmanın Şematik Görünümü ... 52
Şekil 5.3 Yeni İplik Verici Mekanizma Ve Parametreleri ... 53
Şekil 5.4 E Noktasının Konumunun Vektörel Gösterimi ... 56
Şekil 5.5 Yeni İplik Verici Mekanizmanın Vektörel Gösterimi... 58
Şekil 5.6 Klasik İğne Ve İplik Verici Mekanizmanın Cinderella Programında Çizdirilen Animasyon Görüntüsü ... 62
Şekil 5.7 Yeni Mekanizma Tasarımı İçin Cinderella Programında Yapılan Çalışmalar ... 63
Şekil 5.8 Klasik Mekanizmadaki Biyel Eğrisinin Düşey Uzunluk Değerine En Yakın Program Çıktısı –I ... 64
Şekil 5.9 Klasik Mekanizmadaki Biyel Eğrisinin Düşey Uzunluk Değerine En Yakın Program Çıktısı –II ... 66
Şekil 5.10 E Noktasının Düşey Bileşenine Ait Konum Grafiği ... 67
Şekil 5.11 E Noktasının Düşey Hız Grafiği ... 67
Şekil 5.12 E Noktasının Düşey İvme Bileşeninin Grafiği ... 68
Şekil 5.13 Yeni Mekanizmada E Noktasının Çizdiği Yörünge ... 69
Şekil 5.14 Yeni Mekanizmaya Ait İğne Konumu ve İplik Verici Göz E Noktasının Konum ve Hız Grafiği ... 70
Şekil 5.15 Yeni Mekanizmaya Ait İğne Konumu ve İplik Verici Göz E Noktasının Konum ve Hız Grafiği (Başlangıç Konumu 180º) ... 72
Şekil 5.16 Klasik Mekanizmaya Ait İğne Konumu ve İplik Verici Göz E Noktasının Konum ve Hız Grafiği ... 72
Şekil EK-1.1 Doğrultu Birim Vektörleri ... 76
Şekil EK-2.1 Dikiş Makinasındaki Dört Mekanizmanın (İğne, İplik Verici, Kumaş Besleme ve Çağanoz) Senkronizasyonu ... 77
1. GĠRĠġ
Dikiş makinası 18. yüzyılda icat edilmiştir. İcadı insanlık için önemli bir gelişmedir, çünkü bu makinanın icadına kadar dikiş işlemi elle yapılıyordu ve çok fazla zaman alıyordu. Dikiş makinası basit olarak bir veya iki ipliğin iğne, mekik, masura, lüper gibi yardımcı elemanlar yardımıyla kumaş yüzeyinde bağlantı oluşturmasını sağlayan bir makinadır. Makina için ilk patenti Thomas Saint almış olsa da ticari anlamda makinayı ilk defa başarılı bir şekilde tasarlayıp seri üretime başlayan Singer olmuştur. Ancak makinanın gelişim sürecine pek çok ismin katkısı olmuştur.
Dikiş makinalarının birçok çeşidi olmasına karşın, temel yapılarının ve mekanizmalarının birbirine benzer olduğu, farklılıkların ise makinanın yapacağı dikiş tipine uygun dikiş oluşum mekanizmalarında olduğu söylenebilir. Esas olarak üç ana dikiş tipine göre, üç ayrı dikiş oluşum mekaniği mevcuttur. Diğer dikiş tipleri de bu dikişlerin türevleri şeklindedir ve dikiş oluşum mekanizmaları farklıdır. Ayrıca makinanın kullanılacağı alana göre yapısal farklılıklar olduğu söylenebilir. Özellikle evde ve sanayide kullanılan makinalar arasında hız, konstrüksiyon ve bazı mekanizmalarda farklılıklar mevcuttur. Ancak temelde tüm dikiş makinalarında bir veya daha fazla ipliğin iğne ve yardımcı elemanlar vasıtasıyla kumaş yüzeyinde ilmek oluşturması esastır. Bu nedenle tüm makinalarda bazı elemanların aynı olduğu söylenebilir. Bunlar iğne mili, iğne, iplik gerilim mekanizması, ana mil (kol mili), volan ve ana plakadaki mekanizmalara güç ileten bağlantı çubuklarıdır. Doğal olarak bu elemanlar dışında makinaya özel kamlar, ayar mekanizmaları, bağlantı elemanları eklenmiş olabilir.
Dikiş makinaları, makinanın yapısı, dikiş tipi, kullanım yeri, kumaş besleme düzeni, iğne iplik sayısı ve çalışma sistemine göre olmak üzere değişik biçimlerde sınıflandırılmasına karşın, temel olarak sanayi tipi (endüstriyel tip) ve ev tipi dikiş makinaları olarak sınıflandırılabilir.
Sanayi tipi dikiş makinaları ev tipi makinalardan daha hızlı, ağır ve büyük bir yapıya sahiptirler. Sadece bir fonksiyon için tasarlanırlar. Hazır giyim üreticileri bir ürünü bitirmek için farklı fonksiyonlardaki makina çeşitlerini kullanırlar. Sanayi tipi makinalar ayrıca kilit dikiş yerine daha çok zincir veya zigzag dikişe eğilimlidirler.
Sanayi tipi makinaların fabrika koşullarında uzun saatler çalışacak sağlam yapıya sahip olabilmeleri için şasesi dökme demir, diğer mekanizma ve tertibatları çeşitli metallerden yapılır. Sanayi tipi makinaların aksine ev tipi dikiş makinalarının çok yönlü, esnek ve taşınabilir olması istenir. Hafiflik önemlidir, birçok ev tipi dikiş makinası sert plastik ve polimerden yapılarak istenen bu özellik sağlanır. Böylece temizliği kolay, darbelere karşı dirençlidir. Bakır, krom ve nikel gibi diğer metaller özel parçaların üretiminde kullanılır.
Ev tipi dikiş makinaları 1500 d/dk hıza kadar dikiş yapabilirken, endüstriyel tiptekiler 5000 d/dk hıza kadar ulaşabilir. Ev tipi makinaların çoğu, düz dikiş veya zigzag dikiş makinalarıdır. Düz dikişte iğne sadece aşağı yukarı hareket ederken, zigzag dikişte aşağı yukarı hareketin yanında, yana doğru da hareket eder. Böylece eğrisel dikişler veya şekilli dikişler ortaya çıkar.
Ev tipi ve endüstriyel tip dikiş makinaları arasındaki en önemli farklardan biri de güç kaynağının boyutları ve yeridir. Sanayi tipi dikiş makinalarında daha güçlü bir motora ihtiyaç duyulur. Bu nedenle motor, ev tipi makinalara göre daha büyüktür ve ana plakanın altında yerleştirilir. Ev tipi olanlarda motor makinanın şasesi içindedir.
Dikiş makinasının icadı tekstil sektörünün hızlı bir şekilde gelişmesine ve hazır giyim üretiminin seri hale gelmesine neden olmuştur. Günümüzde dünyada en çok üretilen ve kullanılan makinalar arasında olması bu makinanın önemini gözler önüne sermektedir. Hem endüstriyel tip hem de ev tipi dikiş makinaları Türkiye’de çok yaygın bir kullanım alanına sahiptir. Ancak gerçek anlamda dikiş makinası üretimi yapılmamaktadır. Almanya, Japonya, İtalya, ABD ve Çin önde gelen dikiş makinesi üreticilerindendir. Özellikle son dönemlerde Çin dikiş makinası üretiminde lider olma yolundadır.
2. KAYNAK ARAġTIRMASI
Anonymous (1999). Bu çalışmada endüstriyel tip dikiş makinalarının sınıflandırılması yapılmıştır. Ayrıca dikiş çeşitleri ve oluşum mekanizmaları anlatılmıştır. Dikiş makinasındaki temel elemanlardan bahsedilmiştir. Dikiş işlemi sırasında oluşan hatalar ve nedenleri tanımlanmıştır. Makinada yapılan temel ayarlardan ve dikiş ipliği çeşitlerinden bahsedilmiştir.
Chen, Zou ve Du (2000) tarafından yapılan çalışmada dikiş makinasında bulunan mekanizmaların temsil edildiği bir bilgisayar simülasyonu hazırlanmış ve mekanizmaların kinematik davranışlarını öngören bir model sunulmuştur. Çalışmada dikiş makinası simulasyonuna göre yapılan ölçümler dikiş makinası tasarımının geliştirilmesi ve dikiş işleminde daha iyi kontrol sağlanması için yol gösterici olarak değerlendirilmiştir. Bu çalışmada özellikle iplik besleme ve iplik gereksinimi dengesi üzerine çalışılmıştır. İplik besleme bir dikiş ilmeği için iplik verici tarafından beslenen iplik miktarı olarak tanımlanmıştır İplik gereksinimi ise bir dikiş ilmeği için gerekli olan ve mekik-masura mekanizması tarafından kontrol edilen iplik miktarı olarak tanımlanmıştır. Bunun sonucunda iplik gereksinimi ve iplik besleme dengesinin iplik verici mekanizmasının tasarım parametrelerinde değişiklik yapılarak değiştirilebileceği veya iyileştirilebileceği görülmüştür. Model deneysel olarak bir endüstriyel kilit dikiş makinasında denenmiştir.
Dittrich ve Braune (1978). Burada düzlemsel mekanizmaların yapısı, kinematiği ve dinamik analizi ile ilgili grafik ve analitik yöntemler ayrıntılı olarak anlatılmıştır. Her konu, pratikte kullanılan örnek mekanizmalarla uygulamalı olarak açıklanmıştır.
Krasowska, Frydrych ve Rybicki (2006). Bu çalışmada dikiş oluşumu esnasında ipliğin besleme gereksinimi ve farklı tip makinalardaki farklı iplik
besleme mekanizmaları için iplik kontrolü ele alınmıştır. Klasik ve tek eksenli diskli iplik vericiler açıklanmıştır.
Ogawa (1960). Bu çalışmada bir mekanizma uzvu üzerindeki bir noktanın yörüngesi mekanizma boyutlarına bağlı olarak tanımlanmaktadır. Biyel eğrisi olarak adlandırılan bu yörüngeler, çarpıklık, bükülme ve katlı noktalarına göre birkaç tipe ayrılabilirler. Burada izah edilen yöntemle, sonuçta klasik metotlara göre daha yüksek doğrulukla ve daha hızlı bir şekilde dört çubuk mekanizması sentezi yapıla-bilmektedir. Yine bu metotla 6 uzuvlu bir mekanizma elde etmek daha kolaydır.
Ogawa (1962). Bu çalışmasında, bir önceki çalışmasında ele aldığı 6 uzuvlu mekanizmadaki çözülemeyen problemleri analiz ederek bulduğu C tipi mekanizmayı kullanarak, sadece iplik verme işlemi için 6 uzuvlu ve döner çiftlerden oluşan ve iplik verici ucu serbest, ideal iplik verme eğrisini sağlayan yeni bir mekanizma tasarlamıştır. Bu mekanizma dikiş işleminin daha sessiz olmasını sağlamıştır.
Ogawa ve Ebihara (1962)’ya ait bu patent çalışmasında dikiş makinesi için döner çiftlerden oluşan 6 uzuvlu bir iplik verici mekanizma tasarlanmıştır. Geliştirilen iplik verici mekanizmanın serbest ucu ideal iplik besleme hareketini sağlayacak şekilde uyarlanmıştır.
Ogawa, Yoshimatu ve Wakahara (1962). Daha önce Ogawa tarafından bir mekanizma uzvu üzerindeki bir noktanın yörüngesi mekanizma boyutlarına bağlı olarak tanımlanarak dört çubuk mekanizmalarının sentezi yapılmıştı. Bu çalışmada bu yöntem 6 uzuvlu mekanizmalarının sentezinde kullanılmıştır. Altı uzuvlu mekanizmaların konum karakteristikleri, tahrik uzvunun tam dönme yapması ve tahrik edilen uzvun salınım yaptığı çalışma durumunda analiz edilmiştir. Sonuç olarak, farklı tiplerdeki 6 çubuk mekanizmalarında mekanizma yapısı ve uzuv konumları arasındaki ilişkiler daha anlaşılır bir hale gelmiştir. Bu
durumun istenen hareketi üreten bir mekanizma seçiminde tasarımcılara doğrudan yardımcı olacağı beklenmektedir.
Przytulski ve Zajączkowski (2006) yaptıkları bu çalışmada basit bir overlok makinasının tasarımı için gerekli olan bazı mekanizmaların bilgisayar yardımıyla kinematik analizini yapmışlardır. İğne kolu tahrik mekanizması, tutucu mekanizma ve iletim mekanizması gibi seçilen mekanizmaların tasarımları için bazı analizler yapılmıştır. Lagrange polinomu ile interpolasyon uygulanmasıyla sürekli fonksiyonlar yerine ayrık fonksiyonlar kullanılmış, seçilen elemanların hareket parametreleri bu fonksiyonların türevleri olarak belirlenmiştir.
Suh ve Radcliffe (1978)’e ait bu çalışmada mekanizma yapısı, katı cisim kinematiği, mekanizmaların kinematik analizi için vektör ve matris metotları, mekanizma sentezi ve dinamiği konuları anlatılmıştır
Žunič-Lojen ve Gotlih (2003) yaptıkları çalışmada bilgisayar simülasyon paket programı yardımıyla iğne mili–iğne ve iplik vericinin kinematik analizini yapmışlardır Kinematik analizi, yaptıkları modellemeye ve dikiş işlemi esnasında oluşan iplik gerilim kuvvetlerinin ölçümlerine dayandırarak bazı diyagramlar çizmişlerdir. Bu diyagramlar iplik ve dikiş makinası elemanları arasındaki dinamik etkileşimlerin analizini mümkün kılmaktadır. Simülasyonların sonucunda mekanizmada karakteristik noktaların hareketini tanımlayan eğriler bulunmuştur.
Žunič-Lojen ve GerˇSak (2005)’a ait çalışmada dikiş makinasının bir devrinde ve dikiş oluşum işlemi esnasında farklı konumlarda dikiş ipliğinin maruz kaldığı gerilim değerleri belirlenmiştir. Buna göre dikiş oluşum işlemi esnasında iplik gerilim ayarlayıcı ile iplik verici arasında kalan iplik parçası en yüksek gerilime maruz kalmaktadır. İplik verici ve iğne arasındaki bölgedeki ipliğe uygulanan gerilim ise bunu takip etmektedir. Dinamik gerilim ve gerilim kuvvetleri dikiş hızına bağlı olarak değişmektedir.
3. DĠKĠġ MAKĠNALARI VE DĠKĠġ MEKANĠĞĠ
3.1. DikiĢ Makinası
Dikiş makinası elemanlarını, ana plaka, ana plaka üst kısım ve ana plaka alt kısım olmak üzere 3 bölüme ayrılarak incelenebilir(Şekil 3.1).
3.1.1 DikiĢ makinası üst kısım elemanları ve görevleri
Dikiş makinası üst kısmı makine başı, makine kolu, makine boynu olmak üzere 3 bölümde incelenebilir.
3.1.1.1 Makina baĢı
Makina başında iplik verici (horoz), baskı ayağı mekanizması, iğne mili, iğne ve iplik gerdirici(tansiyon mekanizması) bulunur.
3.1.1.2. Ġplik verici (horoz) ve görevi
İplik verici dikiş esnasında oluşan ilmeğin masura üzerinden geçebilmesi için gerekli iplik miktarını makaradan sağar. Dikiş için gerekli olan miktardan fazlasını da geri çeker, bu sırada da bir dikiş boyu kadar ipliği makaradan sağma işlemini yapar.
İplik vericiler makinanın yapısına bağlı olarak dakikada 1500-4500 defa aşağı yukarı hareket ederler. Eski makinalarda yaylı, günümüzdeki makinalarda ise dört çubuk mekanizmasına sahip iplik vericiler kullanılmaktadır.
Şekil 3. 4 Makina Başında Bulunan Elemanlar ( Pfaff 2008)
Günümüzdeki makinalarda iplik verici, iğne mili ile kol mili arasında hareket aktarımı sağlayan kranka bağlıdır. Krankın dönmesiyle iplik verici hareket eder, sistem basit bir dört çubuk mekanizmasıdır. Sanayi tipi dikiş makinalarında çoğunlukla bu tip iplik verici kullanılır. İplik vericinin çizdiği yörünge Şekil 3.5’ deki gibidir.
Şekil 3.5 Mafsallı İplik Verici ve Gözün Çizdiği Yörünge (Dittrich ve Braune 1978)
3.1.1.3. Baskı ayağı mekanizması ve görevi
Baskı ayağı dikiş oluşumu sırasında dikilen yüzeyi bastırarak kumaş ilerletme mekanizmasının itme hareketinin kumaşa etki etmesini sağlar. Baskı ayağına bastırma kuvveti bir yay vasıtasıyla sağlanır. Dikiş plakası ile baskı ayağı arasındaki uzaklık 6-8 mm arasında değişebilir. Bu mesafe kumaş kalınlığına göre artar veya azalır. Kullanılan baskı ayağı yapılacak dikiş tipine ve özel işleme göre veya kullanılan kumaşa göre farklı özellikte olabilir(Şekil 3.6).
3.1.1.4. Ġğne mili-iğne ve görevi
Krank biyel mekanizması ile kol miline bağlı olan iğne mili doğrusal hareket yaparak iğnenin aşağı yukarı hareketini sağlar. İğne ise kumaşı delerek üst ipliği alta geçirir ve kumaşın alt yüzeyinde ilmek oluşturur. Dikiş oluştuktan sonra fazla ipliğin çekilmesine de yardım eder.
Dikiş oluşumunda temel elemanlardan biri olan dikiş iğnesi ise el iğnelerinden farklı bir yapıdadır. Dikiş makinası iğnelerinde göz ve uç aynı tarafta bulunur.
Şekil 3. 7 Dikiş Makinası İğnesinin Yapısı (Juki Corp. 1999)
3.1.1.5. Ġplik gerdirici (tansiyon) ve görevi
Üst iplik gerginliğini sağlayan tertibata tansiyon da denir. Tansiyon mekanizması iplik vericinin çalışmasını sağlar. Bu sistem olmadan horoz çalışmaz. İplik gerdirici alt ve üst iplikle oluşturulan bağlantının kumaşın uygun yerinde horoz tarafından çekilmesine yardım eder. İplik gerdirici ve horoz dikiş için gerekli olan miktardaki ipliğin sağılmasını sağlar.
Şekil 3. 8 İplik Gerdirici (Tansiyon) (Juki 2008)
3.1.2. Makina kolu
Makinanın kol kısmında bulunan kol mili güç kaynağından aldığı hareketi krank biyel mekanizması ile iğne mili-iğne ve iplik vericiye iletir. Ev tipi makinalarda değişik dikiş ve nakış örneklerinin yapılabilmesi için ana mil üzerinde bir de kam mekanizması bulunur. Bu şekilde iğne mili aşağı yukarı hareketin yanı sıra aynı zamanda yanlara doğru da hareket eder.
Şekil 3. 9 Makine Kolu ve Makine Boynunda Bulunan Elemanlar
3.1.3 Makina boynu
Makina boynunda yer alan kol miline düşey olarak bağlanmış çubuklarla makinanın alt kısmına hareket iletimi sağlanır. Ayrıca ana güç kaynağına bağlı kayış buradadır. Bu kayış kol miline bağlıdır ve bu şekilde hareket aktarımı sağlanır. Volan, masura sarma tertibatı, dikiş boyu ayarı, yağlama mekanizması da bu bölümde yer alır.
3.2. DikiĢ Makinası Ana Plaka Elemanları Ve Görevleri
Bu kısım bir plaka üzerine oturtulmuştur ve üzerinde kumaş ilerletme mekanizması (besleme dişlileri), çağanoz-mekik masura ve bunlara hareket sağlayan mil ve dişliler bulunmaktadır. Ev tipi makinalarda ayrıca tahrik motoru da bu kısımda yer alır.
3.2.1. KumaĢ ilerletme( besleme) mekanizması
Dikiş yapılırken kumaşın arkaya doğru itilmesini sağlayan dişlerden oluşan bir sistemdir. Bu mekanizma sayesinde dikişin eşit aralıklarla oluşması sağlanır. Dişler bir mekanizma vasıtasıyla yükselme-alçalma ve ileri-geri hareket yaparlar. Dikiş işlemi esnasında dişler önce yükselir ve kumaşı ileri doğru iter. İleriden aşağı doğru hareket eder. Alttan sola doğru gider ve tekrar yukarı çıkarak kumaşı itmeye başlar.
3.2.2. Çağanoz, mekik, masura, lüper
Dikiş oluşumundaki en önemli elemanlar arasında mekik, masura ve çağanoz (kavrayıcı) bulunmaktadır.
Masura; alt ipliğin üzerine sarıldığı elemandır. Alüminyum veya demirden yapılır.
Şekil 3.11 Masura
Çağanoz ise; iğne tarafından oluşturulan üst iplik ilmeğini yakalayıp kendi
Şekil 3.12 Çağanoz (Kavrayıcı) Tipleri
Zincir dikiş yapan makinelerde alt iplik yani masura kullanılmaz. Tek iplikle dikiş yapılır. Bu nedenle mekiğe de ihtiyaç yoktur. Bu makinelerde iğne ipliğini alıp dikiş ilmeği haline getiren elemana lüper denir.
Mekik; masuranın içine takıldığı dikişin oluşmasını sağlayan alt ipliği taşıyan gerginliğini sağlayan kısımdır.
Şekil 3. 14 Mekik (Megep 2007)
3.3 DikiĢ Makinası Alt Kısım Elemanları Ve Görevleri
Dikiş makinasının alt kısmında bulunan elemanlar sanayi tipi ve ev tipi makinalarda farklılık gösterirler. Ev tipi dikiş makinalarında alt kısımda sadece ayak pedalı bulunurken sanayi tipi makinalarda ayak pedalı, motor, baskı ayağı kaldırma için diz ile kaldırma kolu bulunur.
3. 4. DikiĢ Makinası ÇalıĢma Prensibi Ve Mekanizması
Dikiş makinalarında motor, ayak pedalı veya elle sağlanan hareket, kayış yardımı ile kol miline (ana mil) ve üzerindeki volana iletilir. Volan hem bir atalet elemanı, hem de dengeleme elemanı olarak mekanizma hareketinin düzgün bir şekilde oluşmasını sağlar. Kol miline bağlı krank mili, krank biyel mekanizması ile makina başındaki parçaların (iğne mili - iplik verici) aşağı yukarı hareketini sağlarken, kol miline bağlı çubuklar ile de alt kısımdaki parçaların hareketleri gerçekleşir.
Besleme dişlerinin hareketi, ana mile bağlı besleme dişlisi krank milinden sağlanmaktadır. Kumaş, baskı ayağı ile iğne plakası arasında sıkıştırılmış durumda-dır. İğne kumaşa batarken besleme dişleri aşağı doğru hareket eder (Şekil 3.15.a). İğne kumaştan çıkarken dişler ileri doğru hareket eder (Şekil 3.15.b). İğne yükselmeye devam ederek dikiş ilmeğini oluştururken dişler yukarıya kumaşa doğru hareket ederler (Şekil 3.15.c). Dikiş ilmeği kumaşa sabitlenince besleme dişleri kumaşı kavrayarak arkaya doğru hareket ederler (Şekil 3.15.d). Her devirde besleme dişleri ana plakaya doğru yükselerek, üzerindeki dişler kumaşı dikiş boyu ayarlayıcısında yapılan ayara göre ufak miktarlarda ileriye doğru besler. Böylece dikişin eşit aralıklarla oluşması sağlanır.
Dikiş makinasında düzgün bir şekilde dikiş yapılabilmesi için baskı ayağı ve besleme dişleri vasıtasıyla kumaş kontrolü yapılır. Baskı ayağı dikiş oluşumu sırasında dikilen yüzeyi bastırarak besleme dişlerinin kumaşa etki etmesini sağlar. Baskı ayağındaki baskı kuvveti bir yay vasıtasıyla sağlanır. Baskı miktarı makina başındaki baskı ayar vidası ile ayarlanabilir (Şekil 3.16 ).
Şekil 3. 16 Baskı Ayağı ve Kumaş Besleme Mekanizmasıyla Kumaş Kontrolü (Tools For Self Reliance 2006)
Dikiş gerginliği iki farklı mekanizma tarafından kontrol edilir;
1. Mekik üzerinde bulunan bir yay ile masuradan sevk edilen ipliğe küçük bir gerilim verilir.
2. Ana gerilim mekanizması ise makinanın başında bulunur ve üst ipliğe yani iğne ipliğine uygulanır. İplik iki disk arasından geçer. Diskler arası baskı kuvveti bir yay ve bir somunla ayarlanabilir. Bu somun elle sağa ve sola çevrilerek yayın basıncı ayarlanır (Şekil 3.8).
İplik gerginliğini sağlamada yardımcı bir eleman da iplik vericidir. İplik verici (horoz) ve tansiyon mekanizması birbirlerine bağlı olarak çalışırlar. Tansiyon mekanizmasında bulunan iplik verici yay, horozun çalışmasına yardımcı olur. Bu yayın basıncı ayarlanarak istenen gerginlik sağlanır. Horoz aşağıdan yukarı hareket ederken tansiyon mekanizmasındaki diskler kapalı durarak ipliğin makaradan sağılmasını engeller.
3.5 DikiĢ Tipleri Ve OluĢumu
Temel olarak 3 tip dikiş vardır. Bunlar el dikişi, zincir dikiş ve kilit dikiştir. El dikişi; tek bir ipliğin kumaşın üzerinden alta geçmesi ile oluşur. El dikişi yapan makinelerde altta ve üstte iğne mili ve iplik tutucu lüperler bulunmaktadır ve iğne üst mil ve alt mil arasında sevk edilir. İplik verici (horoz ) mekanizması bulunmaz. Kilit dikiş iki iplik ve hareketli çağanoz-mekik sistemiyle yapılırken zincir dikiş tek veya çift iplikle ve lüperle yapılır. Diğer dikiş tipleri ise temel dikiş tiplerinin türevleri şeklindedir.
3.5.1 Kilit dikiĢ
Üst iplik(iğne) ve alt iplik(masura) olmak üzere iki iplikle oluşan dikiştir. İğne gözünde taşınan iplik, masuranın taşıdığı alt iplikle ilmek yaparak dikişi oluşturur. Üst iplikle alt iplik birbirleri ile kumaşın orta noktasında halka oluşturur. Ters ve düzünde aynı görüntüye sahiptir. Tam dönen kavrayıcılı (çağanoz) ve yarı dönen kavrayıcılı olmak üzere iki farklı oluşum mekanizması vardır.
3.5.2.1. Tam dönen kavrayıcı ile kilit dikiĢ oluĢumu
Tam dönen çağanozlu dikiş makinalarında ana mile bağlı bağlantı mili, konik dişliler yardımıyla dönme hareketini çağanoz tahrik miline iletirler. Şekil 3.17’de;
a) İğne ulaşabileceği en alt pozisyondan(alt ölü konumdan) yukarıya doğru hareket etmeye başladığı sırada gözünde taşıdığı ilmek şekli almış olan iplik, kavrayıcının sivri uçlu kancası ile iğnenin yan tarafından yakalanır ve kavrayıcının dönmesi ile çekilmeye başlanır.
b) Kavrayıcı tarafından çekilen üst iplik çağanozun iç kısmındaki farklı bölümlere ayrılır. İğne tarafındaki üst iplik çağanozun iç arka tarafına ayrılır. Kumaş tarafındaki üst iplik ise çağanozun sağ iç kısmına ayrılır.
c) Çağanoz dönerek üst ipliği alt ipliğin bulunduğu mekik çevresinde çeker. Bu esnada iplik verici(horoz) aşağı doğru hareket ederek üst ipliğin mekik etrafında dönüşü için gerekli iplik miktarını besler.
d) Üst iplik mekik etrafındaki dönüşünü tamamladıktan sonra horoz yukarı doğru hareket etmeye başlayarak beslediği ipliği geri çeker ve üst iplik ile alt iplik birbirleriyle ilmek oluşturur.
e) Üst iplik horoz tarafından geri çekildikçe, alt ipliği yukarı çekip sıkıştırarak dikiş ilmeğini oluşturur ve hemen arkasından kumaş beslemesi yapılır. Daha sonra iğne aşağı inmeye başlar ve yukarıda anlatılanlar sırayla tekrarlanır. Böylece kilit dikiş oluşur.
Şekil 3. 17 Tam Dönen Çağanoz (Kavrayıcı) ile Kilit Dikiş Oluşumu (Juki Corp. 1999)
3.5.2.2.Yarım dönen çağanoz (kavrayıcı ) ile kilit dikiĢ oluĢumu
Yarım dönen çağanozlu dikiş makinalarında ana milden hareket alan bir dört çubuk mekanizması vasıtasıyla çağanoz mili 180 civarında bir açı kadar döndürülür. Şekil 3.18’de;
a) İğne alt ölü konumdan yukarı doğru hareket etmeye başladığı sırada gözünde taşıdığı ilmek şekli almış olan iplik, kavrayıcının sivri uçlu kancası ile iğnenin yan tarafından yakalanır ve çağanozun dönmesi ile çekilmeye başlanır.
b) Çağanoz dönerek üst ipliği alt ipliğin bulunduğu mekik çevresinde çeker. Bu esnada iplik verici (horoz), üst ipliğin mekik etrafında dönüşü için gerekli iplik miktarını besler.
c) Çağanozun yarım tur dönüşünden sonra üst iplik, horoz (iplik verici) tarafından geri çekilir ve üst iplik ile alt iplik birbirleriyle bağlantı oluşturur.
d) Üst iplik horoz tarafından geri çekildikçe alt ipliği yukarı kaldırarak dikiş ilmeğini oluşturur ve hemen arkasından kumaş beslemesi yapılır. Daha sonra iğne aşağı inerek yukarıda anlatılanlar sırayla tekrarlanır.
Şekil 3.18 Yarı Dönen Çağanoz (Kavrayıcı) ile Kilit Dikiş Oluşumu (Juki Corp. 1999)
3.5.3. Zincir dikiĢ
Zincir dikişte hareket mekanizmasında çağanoz, mekik ve masura yerine sadece lüper kullanılır. Lüpere dönme hareketi milden verilir
3.5.3.1. Tek iplikli zincir dikiĢin oluĢumu
Şekil 3.19’da;
a) İğne ulaşabileceği en alt pozisyonda (alt ölü konum) olduğu sırada ilmek şeklini alan iğne ipliği, lüper tarafından yakalanır. İğne, lüper tarafından genişletilen iğne ipliğinin merkezine girmiş durumdadır.
b) İğne yukarı doğru kumaştan çıkar ve kumaş beslemesi yapılır. Lüper döner ve daha önce yakalamış olduğu ilmeği, yeni oluşan ilmeği çekerken çıkarır. İğne mili yükselmeye devam eder ve iplik verici ipliği çeker.
c) Lüper dönmeye devam ederken merkezindeki ipliği çeker. İplik verici daha önce çıkarılan ilmeği sıkıştırır.
d) Kumaş beslenir ve dikiş oluşur.
4. DĠKĠġ MAKĠNASINDA ĠĞNE HAREKET MEKANĠZMASI VE ĠPLĠK VERĠCĠ MEKANĠZMA
Dikiş makinalarında 4 temel mekanizma mevcuttur: Bunlar sırayla, iğne hareket mekanizması, iplik verici (horoz) mekanizma, kumaş besleme mekanizması ve masura-mekik hareket mekanizmasıdır. Bu mekanizmalar, büyük çoğunlukla dört veya altı uzuvlu kol mekanizmalarıdır. Dikiş işleminin sorunsuz olarak gerçek-leşebilmesi için bu mekanizmalar birbirleriye senkronize bir şekilde çalışmalıdır.
Şekil 4.1 İğne Mili-İğne ve İplik Verici Tahrik Mekanizması (Ogawa 1962) 6 5 2 3 4 E DE kolu
Model ve marka farkı olmaksızın, temel anlamda tüm dikiş makinalarındaki mekanizmalar birbirine çok benzer. İğne ve horoza hareket veren mekanizma tüm dikiş makinalarında aynıdır. Ana milden hareket alan krank biyel mekanizması vasıtasıyla iğneye ve yine aynı kranka bağlı dört çubuk mekanizması ile horoza hareket verilir.
İğne hareket mekanizması ve iplik verici mekanizmanın analizi için JUKI DDL5550 model kilit dikiş makinasından ölçülen uzuv boyutları esas alınmıştır. İplik verici ve iğne mekanizma takımı diğer markalara ait kilit ve düz dikiş makinalarında da hemen hemen aynı olduğundan, bu boyutlarla yapılacak kinematik analiz diğer dikiş makinaları için de geçerli olacaktır. İğneye hareket veren krank biyel mekanizmasında iğnenin bağlı olduğu kayar uzvun hareket doğrultusu düşeydir. Horozun hareketi için kullanılan dört çubuk mekanizmasının sabit uzvu (A0D0) yatayla soldan 48°’lik açı yapar. Şekil 4.2’de şematik olarak görülen mekanizmanın boyutları aşağıdaki gibidir:
r1 = A0D0 = 35 mm r2 = A0A = A0C = 15 mm r3 = CD = 25 mm r4 = DD0 = 30 mm r5 = AB = 50mm DE = 38 mm GA0D0 = 48° CDE = 116°
Şematik gösteriminde görüldüğü üzere mekanizma 6 uzuvludur. Bu mekanizma bir krank biyel ile bir dört çubuk mekanizmasının birleşiminden meydana gelmiştir. 1234 dört çubuk mekanizması iplik verici mekanizma, 1256 krank biyel mekaniz-ması iğne hareket mekanizmasıdır. Burada 6 numaralı uzuv iğne mili-iğne, DE kolu ile katı bağlı 3 numaralı uzuv ise iplik vericidir. Şekilde de görüldüğü gibi iğne milinin, yani kayar uzvun hareket doğrultusu krankın dönme merkezinden geçmektedir, yani krank biyel mekanizması santriktir. İplik verici ise krank biyel mekanizması ile aynı kranka bağlı bir dört çubuk
mekanizmasıdır. İki mekanizmanın krankları arasında 35° lik bir açı vardır (Şekil 4.2). Dört çubuk mekanizması bir kol-sarkaçtır, yani 2 nolu krank tam dönme, 4 nolu kol salınım hareketi yapar.
Şekil 4.2 İğne Mili-İğne ve İplik Verici Mekanizmanın Şematik Gösterimi 35º θ2 θ5 r2 48º A0 B A C D E D0 DE r4 r3 r1 r2 θ2H r5 γ G ω2
4.1.1. Krank-biyel mekanizması (Ġğne hareket mekanizması)
4.1.1.1 Konum Analizi
Şekil 4.3 Krank Biyel Mekanizması
Şekil 4.2’de gösterilen santrik krank-biyel mekanizmasında A0A krankı (2) sabit 2 açısal hızıyla tahrik edilir. Mekanizmanın herhangi bir konumunda uzuvların düşey doğrultuya göre konumlarını belirleyen açıları θ2 , θ5 ve θ6 ile gösterilsin. r6 kayar uzvun( iğnenin) doğrusal konumunu, yani A0 noktasına olan düşey uzaklığı göstersin.
r2 r6 r5 θ2 θ5 A r2 r5 A0 B A A0 B 6
Şekilde uzuvlar için yatay ve düşey izdüşüm yazılırsa; r5 sinθ5 = r2 sinθ2 θ5 = 2 2 5 sin arcsin r r (4.1) r6 = r5 cosθ5 + r2 cosθ2 (4.2) Mekanizma boyutları (4.1) ve (4.2) konum denklemlerinde yerine yazılır ve θ2 = 90° krank açısındaki iğne konumu referans alınarak çizilirse, kayar uzva yani iğneye ait konum grafiği Şekil 4.4’deki gibi olur.
4.1.1.2 Hız Analizi
Krank biyel mekanizmasının vektörel devre kapalılık denklemi yazılırsa;
A0A + AB + BA0 = 0
Uzuvları ifade eden uzunluklar vektörler olarak tanımlanırsa;
r2 + r5 + r6 = 0
µ(θ) = cosθ i + sinθ j olmak üzere, bu vektörler µ(θi) doğrultu birim vektörleri cinsinden yazılırsa (EK-1),
r2 µ(θ2) + r5 µ(θ5) + r6 µ(θ6) = 0 (4.3) Bilindiği üzere konum denkleminin türevi hız denklemini verir. r2, r5 ve θ6’nın sabit olduğu göz önünde tutularak (4.3) denklemi zamana göre türetilirse; dµ(θ)/dt = ωσ(θ) olmak üzere,
6
r µ(θ 6) + r5 ω5 σ(θ5) + r2 ω2 σ(θ2) = 0 (4.4)
Burada σ(θ), µ(θ) ya dik doğrultu birim vektörüdür. (4.4) denklemi, µ(θ5) ile skaler olarak çarpılırsa, r = V6 6 olmak üzere,
V6 cos(θ6 – θ5) + r2 ω2 sin(θ5 – θ2) = 0
Buradan iğnenin hızı bulunur;
6 r = V6 = 2 2 5 2 6 5 sin( ) cos( ) r (4.5)
Mekanizma boyutları hız denkleminde yerine yazılırsa iğne mili-iğneye ait hız grafiği Şekil 4.5’deki gibi elde edilir. Burada krank tahrik açısal hızı ω2 = 1 rad/s alınarak grafik normalize edilmiştir. Grafikteki herhangi bir değer gerçek açısal hız değeri ile çarpıldığı zaman iğnenin gerçekteki hızını verir.
Şekil 4.5 İğnenin Hız Grafiği
Şekilden de anlaşılacağı üzere alt ve üst ölü konumlarda, yani θ2 = 0° ve θ2 = 180°(π rad) konumlarında iğnenin hızı sıfırdır.
(4.4) denklemi σ(θ6) ile skaler olarak çarpılırsa 5 nolu uzvun açısal hızı bulunur: r5 ω5 cos(θ5 – θ6) + r2 ω2 cos(θ2 – θ6) = 0 5 = – 2 2 2 6 5 5 6 cos( ) cos( ) r r (4.6)
4.1.1.3 Ġvme Analizi
(4.4) denkleminin bir kez daha türevi alınırsa iğnenin ivme denklemi elde edilir. dσ(θ) / dt = – ω µ(θ), ω2 = sabit olarak düşünüldüğü için α2 = 0 ve r = a6 6
olmak üzere,
6
r µ(θ6) + r5 ω5 [– ω5 µ(θ5)] + r5 α5 σ(θ5) + r2 α2 σ(θ2) + r2 ω2 [– ω2 µ(θ2)] = 0
a6 µ(θ6) – r5 ω 52 µ(θ5) + r5 α5 σ(θ5) – r2 ω 22 µ(θ2) = 0 (4.7)
(4.7) denklemi, µ(θ5) ile skaler olarak çarpılırsa iğne ivmesi bulunur; a6 cos(θ6 – θ5 ) – r5 ω 52 – r2 ω 22 cos(θ2 – θ5) = 0 6 r = a6 = 2 2 2 2 2 5 5 5 6 5 cos( ) cos( ) r r (4.8)
Mekanizma boyutları (4.8) denkleminde yerine yazılırsa iğneye ait ivme grafiği Şekil 4.6’daki gibi olur. Hız grafiğinde olduğu gibi ivme grafiği de ω2 = 1 rad/s alınarak çizilmiştir, yani ω2 ye göre normalize edilmiştir. (4.6) ve (4.8) denklemlerinde görüldüğü gibi ivme denklemi (ω2)2 bir çarpan olacak şekilde yazılabilir ve bu normalizasyon yapılabilir. İğnenin herhangi bir konumdaki ivmesi grafikteki sayısal değerle ω2 nin gerçek değerinin karesi çarpılarak bulunabilir.
Şekil 4.6 İğnenin İvme Grafiği
4.1.2. Ġplik verici mekanizma (Dört çubuk mekanizması)
Şekil (4.2)’de görüldüğü gibi iplik verici mekanizma bir dört çubuk mekanizmasıdır. İplik verici uç E ile gösterilmiştir. DE kolu 3 nolu uzva katı bağlıdır, E noktası bu uzva bağlı bir biyel noktasıdır. Bu mekanizmanın krankı ile krank biyel mekanizmasının krankı aralarındaki açı farkı nedeniyle aynı fazda dönmezler. Dört çubuk mekanizmasında 2 nolu uzvun sabit uzuv (A0D0) doğrultusu ile yaptığı açı krank açısı θ2H olarak tanımlanırsa, şekilde görüldüğü gibi krank biyel mekanizmasının krank açısı ile aralarında 187° lik bir açı olduğu anlaşılır. θ2 = 0° konumunda bu durum açık olarak görülür. (270° – 48° – 35° = 187°). Her iki mekanizmanın hız ve ivme grafikleri çizilirken bu husus göz önünde bulundurulmalıdır. Çünkü dikiş makinasında dikiş oluşumu için bu iki mekanizmanın senkronize bir şekilde çalışmaları gereklidir.
4.1.2.1 Konum analizi
Burada da krank aynı sabit 2 açısal hızıyla dönmektedir. Mekanizmanın kinematik analizi için, gerçek konstrüksiyonda sabit uzvun(A0D0) yatay doğrultu ile yaptığı 48° lik açı (Şekil 4.2) dikkate alınmaksızın, literatürde yaygın olarak yapıldığı gibi (Söylemez 2007) A0D0 doğrultusu yatay olarak düşünülürse, mekanizma şekil (4.7 )deki gibi olur.
Şekil 4.7 Dört Çubuk Mekanizması ve Parametreleri θ2H A0 C D E D0 DE r4 r3 r1 r2 γ θ4 θ3
Uzuv doğrultularının 1 nolu sabit uzuva göre ölçülen açıları θ2H , θ3 ve θ4 olsun. Şekilde uzuvlar için yatay ve düşey izdüşüm alınırsa;
r2 cosθ2H + r3 cosθ3 + r4 cosθ4 = r1 r2 sinθ2H + r3 sinθ3 = r4 sinθ4
θ3’lü terimler solda diğerleri sağda olmak üzere, her iki denklemin kareleri alınıp toplanırsa,
r32 = r12 +r22 +r42 – 2r1r2cosθ2H – 2 r2 r4 cosθ2Hcosθ4 – 2r2 r4 sinθ2Hsinθ4 +2r1r4 cosθ4
Ara işlemlerden sonra θ2 ve θ4 açılarıyla ilgili Freudenstein denklemi elde edilir (Söylemez 2007).
k1 cosθ4 – k2 cosθ2H + k3 = cos(θ2H – θ4) (4.9)
Burada , k1 = 2 1 r r , k2 = 4 1 r r , k3 = 2 2 2 2 2 3 4 1 2 4 2 r r r r r r T = 4 2
tg denirse trigonometriden, sinθ4 = 2 2 1 T T , cosθ4 = 2 2 1 1 T T yazılır ve
Freudenstein denklemi düzenlenirse T için aşağıdaki ikinci derece denklemi bulunur: AT2 – 2BT + C = 0 (4.10) Burada, A = (1 – k2) cosθ2H – ( k1 – k3) B = sinθ2H C = k1 + k3 – ( 1 + k2) cosθ2H
θ4 = 2arctan 2 B B AC A (4.11)
Mekanizmanın şekilde görülen tertibi için bu ifadede (+) işareti kullanılır. Benzer şekilde θ3 de bulunabilir. Bunun için yukarıdaki izdüşüm denklemlerinden θ4 yok edilir.
k4 cosθ2H + k1 cosθ3 + k5 = cos(θ2H – θ3) (4.12)
Burada, k1 = 1 2 r r , k4 = 3 1 r r , k5 = 3 2 2 3 2 2 2 1 2 4 2 rr r r r r
T3 = tg(θ3 / 2) yazılırsa, θ3 açısını veren denklem;
DT32 – 2BT3 + E = 0 Burada, D = (k4 + 1) cosθ2H + k5 – k1 E = (k4 – 1) cosθ2H + (k1 + k5) Bu denklemin çözümü; θ3 = 2arctan 2 B B DE D (4.13)
4.1.2.2 Ġplik verici uç E noktasının konum analizi
Şekil (4.7) de iplik verici göz E noktasının yer vektörü sabit A0 noktasından başlanarak yazılırsa,
rE = A0A + AD + DE
rE = r2 µ(θ2H) + r3 µ(θ3) + DE µ(θ3 – γ) (4.14)
A0 noktası orijin olmak üzere, E noktasının koordinatları yukarıdaki (4.14) denkleminden aşağıdaki gibi yazılır.
rEx = r2 cosθ2H + r3 cosθ3 + DE cos(θ3 – γ) (4.15) rEy = r2 sinθ2H + r3 sinθ3 + DE sin(θ3 – γ) (4.16)
Mekanizma boyutları yukarıdaki denklemlerde yerine konarak, krankın bir dönüşünde E uç noktasının çizdiği yörünge, yani noktanın biyel eğrisi Şekil 4.8’de görülmektedir. Burada, kinematik analizde kolaylık için yukarıda gösterildiği gibi değil, mekanizmanın makinada orijinal konumunda olduğu haldeki yörüngesi gösterilmiştir. Mekanizma yukarıdaki şekilde 48° dönmüş konumda olduğu için, bu konumdaki yörünge de orijinaline göre aynı miktar dönmüş durumda olacaktır. İki mekanizmanın ortak krankı yani 2 nolu uzuv saat ibreleri yönünde döndürülür. Buna göre E noktasının biyel eğrisi üzerindeki hareket yönü Şekil 4.8’de gösterildiği gibidir.
Şekil 4.8 E Noktasının Çizdiği Yörünge
2 nolu uzvun bir dönüşü için (θ2 = 0 – 360°) E noktasının x ve y koor-dinatlarına ait konum grafiği Şekil 4.9’da gösterilmiştir.
Şekil 4.9 E Noktasının Konum Grafiği
4.1.2.3.Hız analizi
Şekil 4.10 Dört Çubuk Mekanizmasının Vektörel Gösterimi θ2H C D E DE r4 r3 r1 r2 γ θ4 θ3
Burada dört çubuk mekanizmasının vektörel devre kaplılık denklemi;
r1 + r2 + r3 + r4 = 0
r1 µ(θ1) + r2 µ(θ2H) + r3 µ(θ3) + r4 µ(θ4) = 0 (4.17)
θ2H , θ3 ve θ4 parametrelerinin değişken, diğerlerinin sabit olduğu göz önünde bulun-durularak (4.17) denkleminin türevi alınırsa;
r2 ω2 σ(θ2H) + r3 ω3 σ(θ3) + r4 ω4 σ(θ4) = 0 (4.18)
Bu ifade µ(θ4) ile skaler olarak çarpılırsa 3 nolu uzvun açısal hızı bulunur; r2 ω2 sin(θ4 – θ2H) + r3 ω3 sin(θ4 – θ3 ) = 0 3 = – 2 2 4 2 3 4 3 sin( ) sin( ) H r r (4.19)
(4.18) denklemi µ(θ3) ile skaler olarak çarpılarak 4 bulunur: r2 ω2 sin(θ3 – θ2H) + r4 ω4 sin(θ3 – θ4) = 0 4 = − 2 2 3 2 4 3 4 sin( ) sin( ) H r r (4.20)
4.1.2.4 Ġplik verici uç E noktasının hızı
(4.14) denkleminin zamana göre türevi alınarak E noktasının hızı elde edilir.
VE hız vektörünün yatay ve düşey bileşenleri,
VEx = – r2 ω2 sinθ2H – r3 ω3 sinθ3 – DE ω3 sin(θ3 – γ) (4.22)
VEy = r2 ω2 cosθ2H + r3 ω3 cosθ3 + DE ω3 cos(θ3 – γ) (4.23)
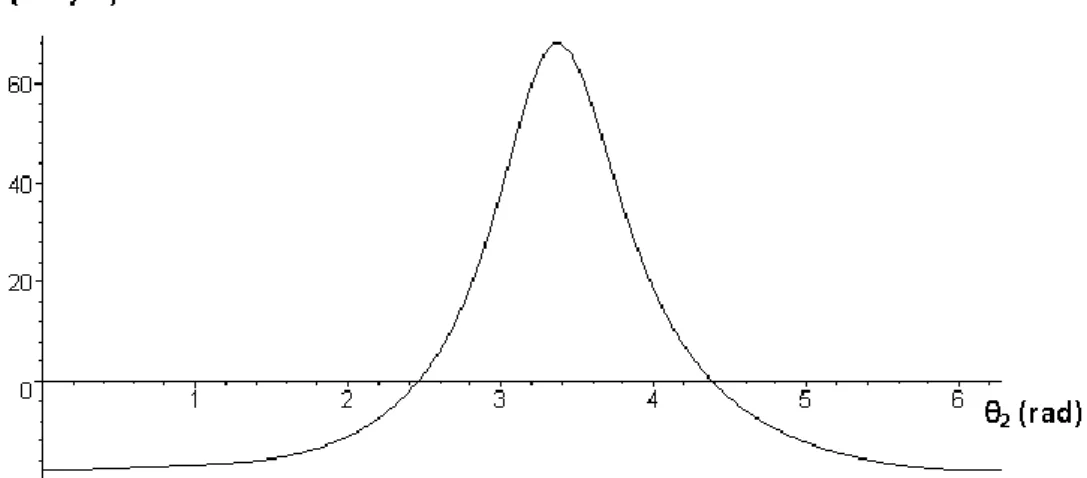
E noktasının düşey hız bileşeni VEy nin değişimi Şekil 4.11 de görülmektedir. Bu hız grafiği de yukarıdaki krank biyel mekanizmasında olduğu gibi normalize edilmiş olarak çizilmiştir.
Şekil 4.11 E Noktasının Düşey Hız Bileşeninin Hız Grafiği
4.1.2.5 Ġvme analizi
α2 = 0 olduğu dikkate alınarak (4.18) denkleminin zamana göre türevi alınırsa;
(4.24) denklemi µ(θ4) ile skaler olarak çarpılırsa; 3 açısal ivmesi elde edilir. – r2 22 cos(θ2H – θ4) + r3 3 sin (θ4 – θ3 ) – r3 23cos (θ3 – θ4) – r4 24 = 0
3 = 2 2 2 2 2 2 4 3 3 3 4 4 4 3 4 3 cos( ) cos( ) sin( ) H r r r r (4.25) 4.1.2.6. E noktasının ivmesi
Denklem (4.21) deki E noktasının hız ifadesi zamana göre türetilirse, aE = –r2 ω22µ(θ2H) + r3 α3σ(θ3) –r3ω32µ(θ3) + DEα3σ(θ3 – γ) –DEω32µ(θ3 –γ) (4.26)
Bu denklemden ivme vektörünün düşey ve yatay bileşenleri aşağıdaki gibi bulunur;
aex = –r2ω22cosθ2H –r3α3sinθ3– r3ω32cosθ3–DEα3sin(θ3– γ) –DEω32cos(θ3– γ) (4.27)
aey = –r2ω22sinθ2H +r3α3cosθ3 –r3ω32sinθ3+DEα3cos(θ3 – γ) –DEω32sin(θ3 –γ) (4.28)
E noktasının düşey ivme bileşeni VEy nin değişimi Şekil 4.12’de görülmektedir. Bu ivme grafiği de normalize edilmiş olarak çizilmiştir.
Şekil 4.12 E Noktasının Düşey İvme Bileşeni
4.2. DikiĢ Mekaniği Ve Senkronizasyon
Şekil 4.13 İğne Konumu ve İplik Verici Göz E Noktasının Konum ve Hız Grafiği
Şekil 4.13’de iğneye ait konum ve iplik verici göz E noktasına ait konum ve hız grafiği birlikte görülmektedir. Şekilde 1 ve 3 ile gösterilen açılarda iplik vericinin hızı sıfırdır ve bu noktalarda iplik verici, yörüngesinin en üst ve en alt konumları üst ve alt ölü konum olarak tanımlanırsa, üst ve alt ölü konuma ulaşır. 2 numaralı konumda ise iplik verici üst ölü konumdan, alt ölü konuma doğru hareket etmekte bu esnada iğnede alt ölü konumundan bir miktar yükselmiş durumdadır. İğne 1 konumunda alt ölü konuma, 3 konumunda ise üst ölü konumuna doğru hareket etmektedir. 2 numaralı konumda iğne alt ölü konumdan bir miktar yükselir ve ucundaki iplik kavrayıcı tarafından yakalanır. Dikiş oluşum mekaniğini daha ayrıntılı olarak açıklarsak;
İğnenin üst ölü konumu başlangıç konumu olarak kabul edilsin (Şekil 4.14.a), bu sırada iplik verici dört çubuk mekanizmasının krank açısı θ2H yaklaşık 7˚dir. Bu esnada kumaş besleme dişleri de üst ölü konumdadır ve kumaşı kavramıştır. İğne aşağı doğru hareket etmeye başlar (Şekil 4.14 b-c) ve krank 180° dönerek alt ölü konuma ulaşır (Şekil 4.14 d). İğnenin aşağı doğru hareket etmeye başlamasıyla kumaş besleme dişleri kumaşı bırakır ve aşağı doğru hareket ederler. İğne alt ölü konumda iken besleme dişleri de alt ölü konumdadır. İğne ulaşabileceği en alt pozisyondan (alt ölü konumdan) yukarıya doğru hareket etmeye başladığı (Şekil 4.14 e) sırada gözünde taşıdığı iplik ilmek şekli alır, böylece iplik kavrayıcının kancası tarafından yakalanır (Şekil 4.14 f) ve kavrayıcının dönmesi ile çekilmeye başlanır ( Şekil 4.14 g).
Kavrayıcının ipliği yakalaması, iğnenin üst ölü konumundan sonra yaklaşık 200°-210° sonra gerçekleşir (EK-2). İğne yukarıya doğru hareketine devam ederken çağanoz dönerek üst ipliği alt ipliğin bulunduğu mekik çevresinde çeker (Şekil 4.14 h-ı-j-k). Bu esnada iplik verici(horoz) aşağı doğru hareket ederek, üst ipliğin mekik etrafında dönüşü için gerekli iplik miktarını besler. İplik vericinin aşağı doğru hareketi, üst ipliğin mekik etrafındaki dönüşünü sağlayacak iplik serbestliğini de sağlamış olur. Üst iplik mekik etrafındaki dönüşünü tamamlayıp kavrayıcıdan kurtulduktan(Şekil 4.14 m-n) sonra, horoz yukarı doğru hareket etmeye başlayarak beslediği ipliği geri çeker ve üst iplik ve alt iplik birbirleriyle ilmek oluşturur(Şekil4.14 o). Üst iplik horoz tarafından geri çekildikçe, alt ipliği yukarı çekip sıkıştırarak dikiş ilmeğini oluşturur(Şekil 4.14
p), bu sırada iğne yükselmeye devam etmektedir. Besleme dişleri yukarıya kumaşa doğru hareket ederler ve dikiş ilmeği kumaşa sabitlenince besleme dişleri kumaşı kavrayarak arkaya doğru hareket ettirirler, böylece kumaş beslemesi yapılır. Daha sonra iğne aşağı inmeye başlar ve yukarıda anlatılanlar sırayla tekrarlanır. Kilit dikişin oluşumu özet olarak böyledir.
İplik verici (horoz) aşağıdan yukarı hareket ederken tansiyon meka-nizmasındaki diskler kapalı durarak aralarındaki ipliğin sağılmasını sürtünme yoluyla engeller. Horoz üst ölü noktaya ulaşırken iplikteki artan tansiyon sürtünmeyi yener ve kısa bir süre disklerin açılmasını ve makaradan iplik sağılmasını sağlar.
Dikiş oluşumu esnasında iğne kumaş besleme ve iplik besleme hareketleri arasındaki senkronizasyon çok önemlidir. İğne ve kumaş besleme mekanizmaları arasında senkronizasyon olmazsa iğne ve kumaş besleme dişleri çarpışabilir ve iğne kırılabilir. Veya düzgün kumaş besleme yapılmadığından dikiş büzmesi olabilir.
İplik verici ve iğne mekanizmaları da aynı şekilde uyumlu olmalıdır. İğne ipliği, kavrayıcı tarafından yakalandığında iplik verici hem dikiş için gerekli iplik beslemesini yapmalı hem de mekik etrafındaki iplik dönüşü için gerekli gevşekliği sağlamalıdır. Eğer gerekli gevşeklik sağlanmazsa iğne ipliği mekik etrafında dönemez ve gerginlikten dolayı iplik kopuşları meydana gelir. Ayrıca beslenen iplik miktarı da önemlidir. İplik verici dikiş için gerekli olan iplik miktarından daha az iplik beslerse dikiş ilmeği düzgün bir yapıda oluşmaz, dikiş atlaması ve iplik kopuşları olur. Diğer taraftan dikiş için gerekli olan iplik miktarından daha fazla iplik beslenirse gevşek ve zayıf formlu dikiş ilmeği elde edilir veya iğne ipliğe takılır. Dikiş ilmeğinin boyu kumaş besleme mekanizmasının ileri-geri hareket miktarına göre yapıldığından, iplik verici ve kumaş besleme mekanizmasının uyumlu olması gereklidir.
5. YENĠ ĠPLĠK VERĠCĠ MEKANĠZMA TASARIMI
Bu çalışmada düz dikiş makinasında kullanılan klasik iğne ve iplik verici mekanizma yerine daha basit bir konstrüksiyona sahip bir mekanizma tasarımı amaçlanmıştır. Klasik mekanizmada 4. bölümde açıklandığı gibi iğne hareket mekanizması ve iplik verici mekanizmanın krankları arasında belli bir açı vardır ve bunlar birbirine katı bağlıdır. Şekil 4.2’de görülen mekanizmada A noktasındaki mafsal, makina üzerindeki ana tahrik miline bağlı volanın A0 dönme merkezinden r2 krank uzunluğu kadar uzaklığa bağlanır (Şekil 4.1). Bu mafsal, volan ve C noktasındaki mafsal AC uzunluğu ile birlikte beraberce 2 nolu uzvu oluştururlar (Şekil 5.1).
Mekanizmanın hareketi sırasında, şekildeki θ2 açısının 270˚ değerini aldığı konum civarında AC kolu ve 3 nolu uzva ait DC kolu, krank biyel mekanizmasının biyeli (AB) ile üst üste gelir (uzuvların girişimi meydana gelir). Biyel ve diğer iki uzvun hareket esnasında birbirine takılmamaları için hareket düzlemleri farklı olacak şekilde bağlanmaları gerekmektedir. Bunun için, şekildeki 5 nolu uzuv olan biyel en üstte, AC kolu onun altında ve 3 nolu uzuv CD kolu en altta olacak şekilde bir konstrüksiyon yapılmıştır. Böyle bir yapı mekanizmanın hareket düzlemine dik eksenel doğrultuda daha çok yer kaplamasına neden olur. Ayrıca çalışması sırasında hareket düzleminde oluşacak kuvvetlerin mafsallarda söz konusu eksenel doğrultuda oluşturacağı momentin artması ve dolayısıyla mafsallardaki iğne rulmanların daha fazla zorlanması sonucunu da doğurur. Bu mahzurları nispeten de olsa gidermek ve mekanizmayı sadeleştirmek amacıyla iplik verici mekanizmaya biyel kolu vasıtasıyla hareket verecek bir mekanizma tasarımı amaçlanmıştır.
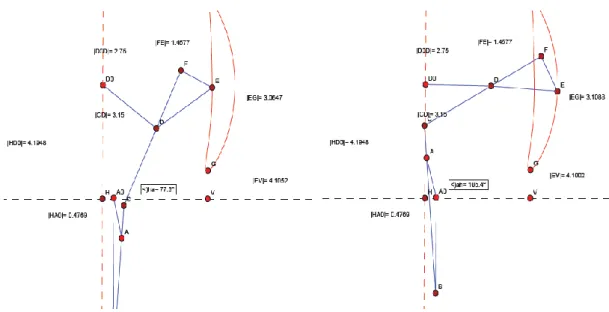
Tasarımı düşünülen mekanizmanın şematik görünümü aşağıdaki gibidir. Burada dikkat edilirse C mafsalı biyelin uzantısı ile 3 nolu uzuv arasında oluşturulmuştur ve 2 nolu uzuvla hiçbir bağlantısı kalmamıştır. Düşünülen bu yeni bağlantıda, hareket esnasında θ2 açısının hiç bir değerinde AC kolu ve 3 numaralı uzva ait DC kolu, krank biyel mekanizmasının biyeli (AB) ile üst üste gelmezler. Bu durum, interaktif bir geometri programında (Cinderella) mekanizma yaklaşık olarak oluşturulup açıkça görülmüştür. Dolayısıyla bu yeni mekanizmada biyel ve 3 nolu uzvun hareket düzlemleri aynı olabilir. A noktasındaki mafsal, klasik mekanizmada olduğu gibi volana aynı şekilde bağlanabilir ve böylece 2 nolu uzuv yani krank sadece volandan ibaret olur.
Yeni mekanizma tasarımında iğneye hareket veren krank biyel mekanizmasında herhangi bir değişiklik yapılmasına gerek duyulmadan, üstteki iplik verici kısmın tasarımının basitleştirilerek değiştirilmesi amaçlanmıştır. İplik verici kolun (DE) 3 nolu uzva benzer şekilde bağlı olması düşünülmüştür. Böylece, klasik mekanizmada olduğu gibi krank biyel ve dört çubuk mekanizmalarının birleştirilmesiyle oluşmuş bir mekanizma değil, altı uzuvlu bir kol mekanizması ortaya çıkar.
Şekil 5.2 Tasarlanan Yeni İplik Verici Mekanizmanın Şematik Görünümü B r6 A0 G r3 r2 =15mm A θ2 θ5 r2 C D D0 AB=r5 =50mm AC=ra r4 DE E γ
5.1 Yeni Ġplik Verici Mekanizmanın Konum Analizi
Şekil 5.3 Yeni İplik Verici Mekanizma ve Parametreleri
İğne hareket mekanizması olan krank biyel için 4. bölümde yapılan kinematik analiz burada da aynen geçerlidir. (4.1), (4.2), (4.5), (4.6) ve (4.8) denklemlerindeki ifadeler burada aynen kullanılmıştır. Mekanizmanın herhangi bir konumunda uzuvların düşey doğrultuya göre konumlarını belirleyen açıları θ2 , θ5 , θ3 ve θ4, D0 sabit mafsal noktasının A0 noktasına olan düşey uzaklığı b, yatay
A0 G r2 A C D D0 AC=a r4 DE F E θ5 θ3 GA0= c GD0= b θ3 r1 θ2 r5 θ4
uzaklığı c ile gösterilsin. Şekil 5.3’de A0ACDD0 kapalı devresinde uzuvlar için yatay ve düşey izdüşüm yazılırsa;
r3 cos θ3 + r4 cos θ4 + a cos θ5 = b + r2 cos θ2 (5.1)
r3 sin θ3 + r4 sinθ4 = a sin θ5 + r2 sin θ2 + c (5.2)
denklemleri elde edilir. Burada θ3 ve θ4 açıları ile ilgili konum denklemlerini elde edebilmek için,
b + r2cosθ2 − acosθ5 = u
asinθ5 + r2sinθ2 + c = k
yukarıdaki tanımlamalar yapılırsa (5.1) ve (5.2) denklemleri aşağıdaki gibi olur:
r4 cos θ4 = u − r3 cosθ3 (5.3)
r4 sinθ4 = k − r3 sinθ3 (5.4)
θ4’ lü terimler solda diğerleri sağda olmak üzere, her iki denklemin kareleri alınıp toplanırsa,
r42 − u2 − k2 − r32 + 2 ur3 cosθ3 + 2 kr3 sinθ3 = 0
Trigonometriden T3 = 3
2
tg olmak üzere, sinθ3 = 3 2
3 2 1 T T , cosθ3 = 2 3 2 3 1 1 T T yazılırsa
θ3 için aşağıdaki ikinci derece denklem bulunur.
AT32 − 2BT3 + C = 0 (5.5)
A = r42 − u2 + k2 + r32 − 2 ur3 B = kr3
C = r42 − u2 + k2 + r32 + 2 ur3
θ3 açısı için (5.5) denkleminden aşağıdaki ifade elde edilir
θ3 = 2arctan
2
B B AC
A (5.6)
Bu ifadede mekanizmanın yukarıdaki tertibi için (+) işareti kullanılır. Benzer şekilde θ4 de bulunabilir. θ3 açısını bulmak için kullanılan yukarıdaki (5.3) ve (5.4) denklemleri aşağıdaki gibi yazılıp benzer ara işlemlerden sonra θ4 için benzer bir ikinci derece denklem bulunur.
r3 cosθ3 = u − r4 cosθ4 r3 sinθ3 = k + r4 sinθ4 DT42 − 2ET4 + F = 0 (5.7) Burada; D = r32 − u2 − k2 − r42 − 2ur4 E = kr4 F = r32 − u2 − k2 – r42 + 2ur4
θ4 için aşağıdaki ifade bulunur, mekanizmanın şekildeki tertibi için bu ifadede (+) işareti kullanılır.
θ4 = 2arctan
2
E E DF
D (5.8)
5.1.2 Ġplik verici uç E noktasının konumu
Şekil 5.4 E Noktasının Konumunun Vektörel Gösterimi
Şekil (5.2)’de iplik verici göz E noktasının yer vektörü sabit A0 noktasından başlanarak yazılırsa,
rE = A0A + AC + CD + DE
E noktasının yer vektörü bu şekilde yazılabileceği gibi farklı bir şekilde de yazılabilir. Şekil 5.2’de gösterildiği gibi DE doğrusu 3 numaralı uzvun doğrultusu ile γ açısını yapmaktadır. Bu uzunluk biri 3 nolu uzuv doğrultusunda(DF) diğeri
E A0 r2 A C D DE F θ2 θ5 θ3 θ3 ra r3 DF FE r5
buna dik doğrultuda (FE) iki vektörün toplamı olarak düşünülebilir. (Şekil 5.4) Böylece vektörünün analitik olarak ifade edilmesinde γ açısının kullanılmasına gerek kalmaz, sadece iki uzunluk kullanılıp formülasyon basitleştirilmiş olur. Buna göre E noktasının yer vektörü aşağıdaki gibi yazılır;
rE = A0A + AC + CD + DF + FE
Burada uzunluklar vektörler şeklinde tanımlanır, DF = d ve EF = e denirse,
rE = r2 µ(90 − θ2) + ra µ(90 − θ5) + r3 µ(90 + θ3) + d µ(90 + θ3) + e µ(θ3) (5.9)
A0 noktası orijin olmak üzere, E noktasının koordinatları yukarıdaki (5.9) denkleminden aşağıdaki gibi yazılır.
rEx = r2 sinθ2 + rasinθ5 − r3 sinθ3 − d sinθ3 + e cosθ3 (5.10)
rEy = −r2 cosθ2 + racosθ5 + r3 cosθ3 + d cosθ3 + e sinθ3 (5.11)
5.2 Yeni Ġplik Verici Mekanizmada Hız Analizi
Mekanizmada A0A krankı (2) sabit 2 açısal hızıyla tahrik edilir. Şekil 5.5’de görüldüğü üzere A0ACDD0 çevriminde vektörel kapalılık denklemi yazılır ve vektörler doğrultu birim vektörü µ(θ) cinsinden ifade edilirse;
A0A + AC + CD +DD0 + D0A0 = 0 r1 + r2 + r3 + r4 + ra= 0
Şekil 5.5 Yeni İplik Verici Mekanizmanın Vektörel Gösterimi
r1µ(90+θ1) + r2µ(90-θ2) + raµ(90−θ5) + r3µ(90+θ3) + r4µ(90+θ4) = 0 (5.12)
θ2, θ3, θ4 ve θ5 parametrelerinin değişken, diğerlerinin sabit olduğu göz önünde bulundurularak (5.12) denkleminin türevi alınırsa;
r2ω2σ(90−θ2) + raω5σ(90−θ5) +r3ω3σ(90+θ3)+r4 ω4 σ(90+θ4)=0 (5.13)
Bu ifade µ(90+θ4) ile skaler olarak çarpılırsa 3 nolu uzvun açısal hızı bulunur.
r2 ω2 sin(θ4 +θ2) + r3 ω3 sin(θ4 -θ3 )+ ra ω5 sin(θ4 +θ5) = 0 θ1 A0 G r2 A C D D0 AC=ra e DE F E θ5 θ3 GA0= c GD0= b θ3 r1 θ2 r5 θ4 r3 r4 d
ω3==– 2 2 4 2 5 4 5 3 4 3 sin( ) sin( ) sin( ) a r r r (5.14)
5.13 denklemi µ(90+θ3) ile skaler olarak çarpılarak 4 bulunur:
r2 ω2 sin(θ3 +θ2) + r4 ω4 sin(θ3 – θ4) + ra ω5 sin(θ3 +θ5) = 0
4 = − 2 2 3 2 5 3 5 3 3 4 sin( ) sin( ) sin( ) a r r r (5.15)
5.2.1 Ġplik verici uç E noktasının hızı
(5.9) denkleminin zamana göre türevi alınarak E noktasının hızı elde edilir.
VE =r2ω2σ(90 – θ2) +aω5σ(90– θ5) +r3ω3σ(90 +θ3)+dω3σ(90+θ3) +eω3σ(θ3) (5.16)
VE hız vektörünün yatay ve düşey bileşenleri;
VEx = – r2ω2cosθ2 – aω5cosθ5 –r3ω3cosθ3 –DFω3cosθ3 – EFω3sinθ3 (5.17)