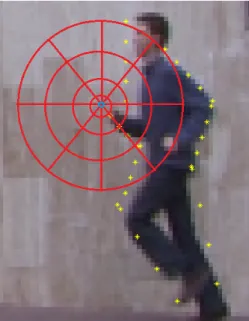
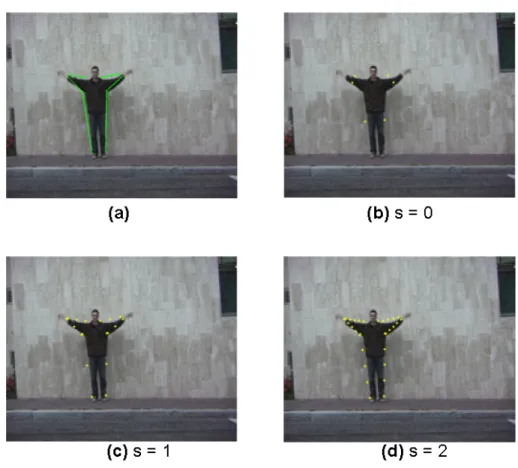
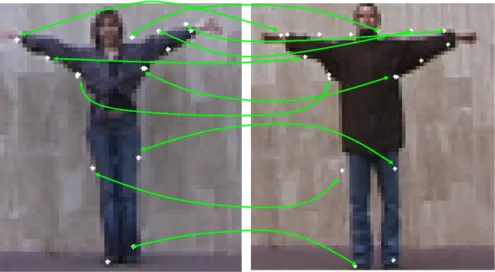
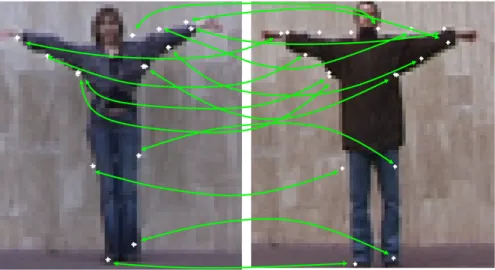
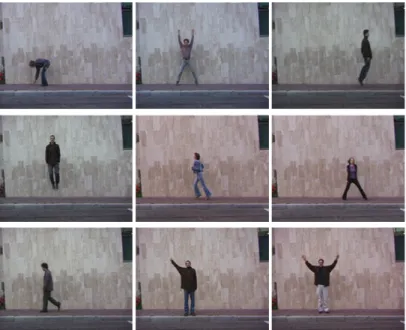
A key-pose based representation for human action recognition
Tam metin
Şekil

Benzer Belgeler
Our results suggest that although volatility response to most news indicators is larger in expansion, currency market reaction to new home sales and Fed funds rate news is larger in
Our policy experiments reveal that the current monetary strategy fol lowed by the CBRT that involves heavy reliance on foreign capital inflows along with a relatively high real
Sometimes, the Gerays acted as loyal members of the Ottoman imperial establishment, or, as unruly nobles with their own vision of political geography, power, and nobility, and
We found that hsCRP levels in the women in the PCOS group were significantly higher than the women in the non-PCOS group, and our current results correspond to the find-
Cirsium handaniae Yildiz, Dirmenci & Arabaci (Asteraceae) is described as a new species from northeastern Anatolia, Turkey.. It belongs to the section Epitrachys and appears to
From a logical standpoint, this comes very close to what Blanchot theorizes as the “murmur” inherent to literary space; if Bolaño has a literary precursor in this regard, it is
We complete the discussion of the Hamiltonian structure of 2-component equations of hydrodynamic type by presenting the Hamiltonian operators for Euler's equation governing the
USG’deki akut apandisite bağlı duyarlılık ve özgüllük hastalarda klinik olarak akut apandisit belirtilerinin çok az belirgin olduğu grup ile orta derecede klinik
