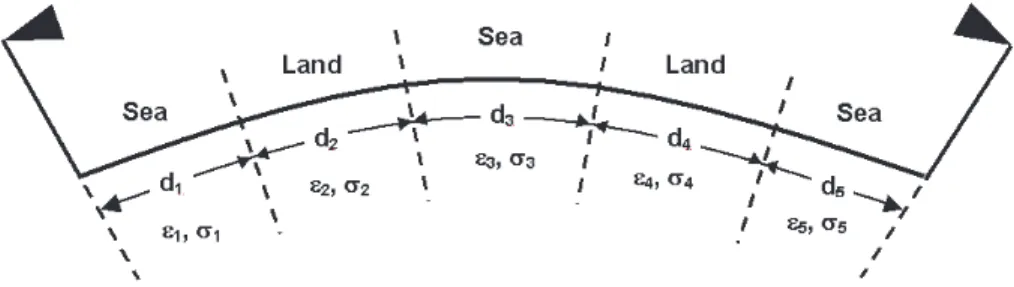
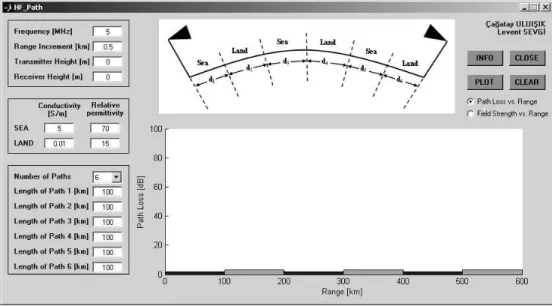
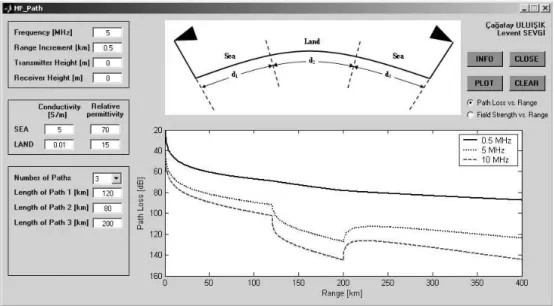
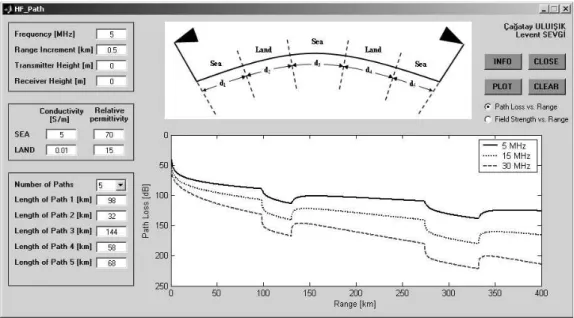
A Matlab-Based virtual propagation tool: surface wave mixed-path calculator
Tam metin
Şekil
Benzer Belgeler
Objective: To investigate the association of white blood cell (WBC) counts, neutrophil, platelets, lymphocyte counts, C-reactive protein (CRP), neutrophil / lymphocyte ratio
A 3 (leadership style; transformational – transac- tional - paternalistic) x 2 (employee gender; male - fe- male) x 2 (leader gender; male - female) mixed design analysis of
It includes the directions written to the patient by the prescriber; contains instruction about the amount of drug, time and frequency of doses to be taken...
According to Adorno’s philosophy, the artistic expression of conflict (such as the dialectics between the building market / sector, and society / nature) using architectural design
Kitabımı bir haftada bitirmek için her gün 30 sayfa S1.Verilen işlemleri yapalım. 7 düzine gözlük, 4'erli olarak paketlenmek iste- niyor. Buna göre, bu iş için kaç paket
In the present study we present a case who underwent a right upper lobec- tomy due to hemoptysis complications related to aspergilloma, arising from the sterile
In our study, we did not find any significant relationship between pneumatization and tinnitus, but we detected two cases of pa- tients with
Sonuç: Annelerin e¤itim düzeyleri düflük olmas›na ra¤men, verilen anne sütü e¤itimi yan›nda bebek bak›m› ve sar›l›k izlemi hakk›nda bil- gilendirme bebeklerin
