B-spline kollokasyon yöntemi ile genelleştirilmiş eşit genişlikli dalga denkleminin sayısal çözümleri
Tam metin
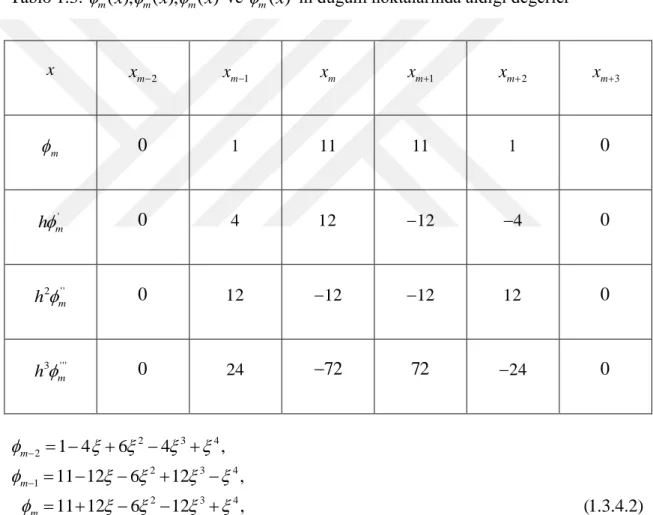
Şekil
![Tablo 2.1. Tek soliter dalga için p 2 , h 0.1, t 0.2 , x [0,80] parametreleri ile bulunan hata normları ve invaryantlar](https://thumb-eu.123doks.com/thumbv2/9libnet/4404755.74989/55.892.167.802.226.1033/tablo-tek-soliter-dalga-parametreleri-bulunan-normları-invaryantlar.webp)
![Tablo 2.2. Tek soliter dalga için p 2 , h 0.1, t 0.2 , x [0,80] parametreleri ile bulunan hata normları ve invaryantlar](https://thumb-eu.123doks.com/thumbv2/9libnet/4404755.74989/56.892.171.806.223.1040/tablo-tek-soliter-dalga-parametreleri-bulunan-normları-invaryantlar.webp)
![Tablo 2.3. Tek soliter dalga için p 3, h 0.1, t 0.2 , x [0,80] parametreleri ile bulunan hata normları ve invaryantlar](https://thumb-eu.123doks.com/thumbv2/9libnet/4404755.74989/57.892.162.804.308.1109/tablo-tek-soliter-dalga-parametreleri-bulunan-normları-invaryantlar.webp)
Benzer Belgeler
[r]
The Effects on Follicular Dynamics Caused by Changing the Application Time of PGF2α and GnRh in the Cosynch Protocol Administered in Montofon Cows with Estrus Stimulated by
Sonra bu kişi, yapıtın kurgusu içinde bir alt katmanda yapıtta yeniden yaratılmıştır, yani yapıtın odak figürü kabul edilen Kamil Kaya’nın varlığıdır ki bu
22 yıl milletvekilliği yapan Hakkı T arık U s’un en büyük hayali, gazetecilerin yararına bir “ ihtisas” kütüphanesi kurmaktı.. U s’un zengin koleksiyonunu
Bu çal¬¸ smada, NLS denkleminin yüksek dereceli B-spline fonksiyonlar kullan¬larak sonlu elemanlar metodu ile say¬sal çözümü ara¸ st¬r¬lm¬¸ s, çözümlerin do¼ grulu¼ gu
Bu tezde RLW denkleminin sayısal çözümleri zaman parçalanması için iki ve üç adımlı Adams Moulton, konum parçalanması için ise kuadratik, kübik, kuartik ve
Bu tez çalışmasında, doğrusal olmayan Schrödinger (NLS) denkleminin sayısal çözümleri, zaman ayrıştırması için Crank Nicolson yöntemine ve konum ayrıştırması
Some of the studies are as follows: Solitary wave solutions of the generalized RLW equation are obtained [21], solutions of generalized RLW equation are obtained using
